Предлагаемое изобретение относится к области вооружения, а именно к ракетной технике.
В настоящее время наиболее массовыми средствами борьбы с танками являются противотанковые ракетные комплексы (ПТРК).
Известные ПТРК имеют, как правило, системы наведения, основанные на телеориентировании ракеты в луче лазера.
Известен способ наведения управляемой ракеты на основе телеориентирования (Ангельский Р.Д. Отечественные противотанковые комплексы, Москва, ACT, Астрель, 2002 г.), включающий обнаружение и распознавание цели, формирование модулированного поля управления лазерного луча, наведение управляющего луча на цель, определение координат отклонений ракеты от оси луча и выработку сигналов коррекции положения ракеты.
Данный способ наведения управляемой ракеты принимается в качестве прототипа. Он реализован в системе управления известных комплексов противотанкового управляемого вооружения "Кастет", "Бастион", "Шексна", "Рефлекс", в которой аппаратура управления, размещенная на командном пункте (например, в танке или БМП), формирует частотно модулированный луч, поперечное сечение которого представляет собой поле управления. Центр поля управления совпадает с линией визирования цели. Приемник излучения ракеты принимает и преобразует модулированный оптический сигнал в электрический, который поступает в электронную аппаратуру (ЭА). ЭА выделяет координаты отклонения ракеты относительно оси луча в вертикальной и горизонтальной плоскости, в соответствии с которыми вырабатываются сигналы управления рулевыми приводами ракеты. Управляющие силы, возникающие при отклонении рулей, удерживают ракету на оси луча до подлета ее к цели.
Опыт общевойсковых учений с применением комплексов, которые реализуют наведение управляемых ракет по рассматриваемому способу, показывает, что последний обладает существенным недостатком, снижающим эффективность наведения управляемой ракеты на цель.
В реальных условиях ведения боевых действий вследствие наличия разнообразных помех (например, пыле-дымовые помехи от разрывов осколочно-фугасных снарядов, специальные аэрозольные завесы, создаваемые бронетанковыми целями и т.д.) существует возможность, после обнаружения цели оператором, закрытия цели помехой на длительное время.
В этом случае оператор должен осуществить поиск другой цели и наведение луча на нее.
При этом стрельба по цели, закрытой помехой, может быть организована другими соседним комплексом, для которого эта цель остается видимой.
В этих условиях возможно ведение стрельбы при пересечении осей управляющих лучей соседних комплексов.
Стрельба в условиях пересечения управляющих лучей может быть вызвана необходимостью поражения целей типа "ТАНК" в наиболее уязвимые места, то есть в боковые поверхности, которые в отличие от лобовой имеют меньшую защищенность.
При стрельбе двумя комплексами по двум целям в случае пересечения осей управляющих лучей и при интервале времени между пусками ракет, меньшем полетного времени до цели, каждая из ракет некоторое время находится в поле управления двух лучей ("своего" и соседнего комплекса), при этом для каждой из ракет луч соседнего комплекса представляет собой аддитивную помеху, выделяемую приемником излучения ракеты наряду с сигналами излучения луча "своего" комплекса.
Как показали результаты полевых статических испытаний лучевой системы управления, а также полунатурного моделирования динамики наведения ракеты с лучевой системой управления в условиях перекрестной стрельбы двумя комплексами, в зависимости от уровня сигналов, выделяемых приемником излучения каждой ракеты от луча "своего" и соседнего комплекса, при пролете ракеты области наложения двух лучей может произойти:
1) частичное разрушение сигналов координат ракеты относительно оси "своего" луча, приводящее к увеличению шумовой составляющей сигналов координат;
2) полное разрушение сигналов координат ракеты относительно оси "своего" луча и луча соседнего комплекса;
3) выделение сигналов координат ракеты относительно оси луча соседнего комплекса (луча "помехи").
В зависимости от этого, при полете ракеты в поле управления двух лучей, возможно одно из следующих событий:
1) продолжение полета в "своем" луче;
2) выход ракеты из обоих лучей или врезание ее в землю;
3) переход ракеты в луч соседнего комплекса (в луч "помехи").
В тоже время было установлено, что при угле между осями лучей γ>5.5° взаимное влияние лучей соседних комплексов не ухудшает их точностные характеристики и перекрестная стрельба двух комплексов может вестись без каких-либо ограничений. Это объясняется тем, что, с одной стороны, при увеличении угла пересечения лучей γ уменьшается уровень сигнала, выделяемого приемником излучения от луча соседнего комплекса вследствие наличия диаграммы угловой чувствительности приемника излучения, с другой стороны, как показывают расчеты, при углах пересечения лучей γ>5.5° расстояние, проходимое ракетой в области наложения двух лучей, становится меньше 80...100 м и столь кратковременное воздействие луча соседнего комплекса не может оказать влияние на конечный результат наведения ракеты на цель.
Для исключения отмеченных недостатков при стрельбе в условиях пересечения осей управляющих лучей комплексов при угле их пересечения γ5.5° возникает необходимость определить условия, при которых обеспечивается удержание ракет в "своих" лучах.
Задачей предлагаемого изобретения является повышение эффективности наведения ракет при перекрестной стрельбе двумя ракетными комплексами.
Эта задача решается за счет того, что в способе наведения на цель ракет управляемых по лучу, включающем обнаружение и распознавание цели, формирование управляющего луча, наведение управляющего луча на цель и формирование сигналов управления ракетой, при перекрестной стрельбе двумя комплексами ракет по двум целям, после обнаружения и распознавания целей первого и второго комплекса, измеряют расстояние между комплексами l, расстояние между целями L, расстояния от комплексов до целей DСТР, определяют угол  между осями лучей первого и второго комплекса и если угол γ≤5,5°, то время ΔtР между запусками ракет первого и второго комплексов выбирают по максимальному значению интервалов времени τ1 и τ2, определяемых из соотношений:
между осями лучей первого и второго комплекса и если угол γ≤5,5°, то время ΔtР между запусками ракет первого и второго комплексов выбирают по максимальному значению интервалов времени τ1 и τ2, определяемых из соотношений:

где 
V - средняя скорость полета ракеты;
h - радиус поперечного сечения управляющего луча;
n - располагаемая перегрузка ракеты;
g - ускорение свободного падения.
Предлагаемое изобретение поясняется графическими материалами (фиг.1, 2, 3).
На фиг.1 изображена схема стрельбы комплексов в условиях пересечения осей управляющих лучей, где использованы следующие обозначения:
К, К' - центры масс комплексов;
С, С' - центры масс целей;
КК'=l - расстояние между комплексами;
СС'=L - расстояние между целями;
ЕЕ'=DСТР - дальность до целей (дальность стрельбы);
ВВ'=Х - расстояние, проходимое ракетой в области наложения двух лучей ("длина" области наложения двух лучей);
АА' - ширина луча "помехи";
О - точка пересечения осей управляющих лучей;
КО=D0 - дальность до точки пересечения управляющих лучей;
γ - угол между осями лучей соседних комплексов.
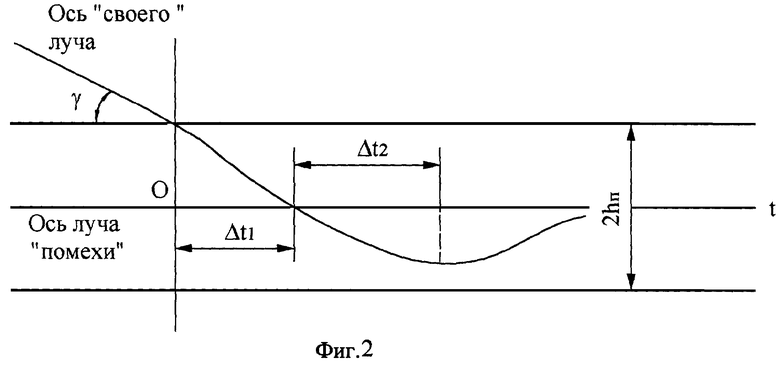
На фиг.2 изображен примерный вид траектории ракеты при ее переходе в луч соседнего комплекса, где использованы следующие обозначения:
Δt1 - время полета ракеты под действием команд управления, формируемых лучом соседнего комплекса (лучом "помехи") в направлении к его оси;
Δt2 - время полета ракеты под действием команд управления, формируемых лучом соседнего комплекса в направлении удержания ракеты в указанном луче;
hП - радиус луча "помехи".
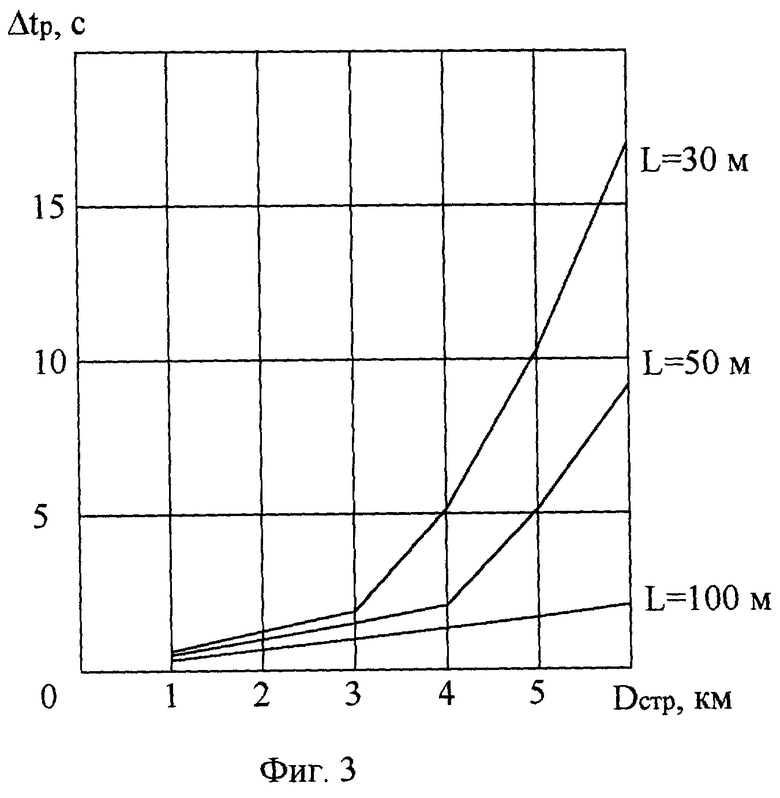
На фиг.3 приведены требуемые значения интервалов времени ΔtР между пусками двух ракет при перекрестной стрельбе двумя комплексами в зависимости от дальности стрельбы DСТР и расстояния между целями L.
При одинаковой мощности излучения приборов наведения двух соседних комплексов, соотношение уровней сигналов, выделяемых приемником излучения каждой ракеты от "своего" луча и луча "помехи", будет определяться только соотношением площадей поперечных сечений лучей на дальности полета ракеты или, что эквивалентно, соотношением квадратов поперечных размеров указанных лучей на дальности полета ракеты, то есть

где UС, UП - уровни сигналов, выделяемых приемником излучения от луча "своего" комплекса и луча соседнего комплекса (луча "помехи") соответственно;
hС, hП - радиус "своего" луча и луча "помехи" на дальности полета ракеты.
Исходя из геометрических соображений, поперечные размеры "своего" луча на дальности полета ракеты определяются по формуле:

где D(t) - текущая дальность до ракеты;
DПР(t) - закон изменения программной дальности панкратической системы прибора наведения, обеспечивающий сужение луча по времени;
h - радиус луча на дальности от прибора, равной программной дальности панкратической системы (номинальный радиус луча);
t - время, отсчитываемое с момента старта ракеты.
Для надежного управления ракетой в лучевых системах наведения обеспечивают постоянный уровень энергии принимаемого приемником излучения по всей дальности полета ракеты.
Это достигается путем обеспечения постоянства размеров поля управления по дальности полета ракеты, то есть

В свою очередь, условие (3) технически реализуется за счет специального выбора закона изменения программной дальности прибора наведения

где V - средняя скорость полета ракеты.
Поперечные размеры луча "помехи" на дальности полета ракеты D(t) можно определить по формуле

где tП - время, отсчитываемое от момента старта ракеты соседнего комплекса.
Очевидно, что

где ΔtР - интервал времени между пусками ракет двух комплексов, оси лучей которых пересекаются (знак "+" в формуле (6) соответствует случаю, когда пуск ракеты соседнего комплекса произведен раньше, знак "-" - позже).
Таким образом, как видно из зависимостей (2), (5) и (6), соотношение поперечных размеров лучей "своего" и соседнего комплексов для каждой ракеты определяется интервалом времени между пусками ракет и, устанавливая тот или иной интервал времени ΔtР между пусками ракет, можно добиться, с одной стороны, того, чтобы для ракеты, выстреливаемой раньше, луч соседнего комплекса (луч "помехи") был шире "своего" луча и не ухудшал точностные характеристики аппаратуры выделения сигналов координат ракеты относительно оси "своего" луча, с другой стороны, того, чтобы для ракеты, выстреливаемой позже, луч соседнего комплекса был настолько уже "своего" луча, что протяженность области наложения двух лучей для нее был достаточно мала, тем самым обеспечивая невозможность перезахвата ракеты соседним комплексом за время пролета этой области.
Требуемый интервал времени разнесения моментов запуска ракет двух комплексов ΔtР определяется, исходя из обеспечения выполнения следующих двух условий:
1) для ракеты, выстреливаемой раньше - воздействие излучения луча соседнего комплекса, при пролете области наложения двух лучей, не ухудшает точностные характеристики аппаратуры выделения сигналов координат ракеты относительно оси "своего" луча;
2) для ракеты, выстреливаемой позже - за время пролета области наложения двух лучей не происходит перезахват ракеты в луч соседнего комплекса.
Для выполнения первого условия отношение уровней сигналов  , как показывают результаты полунатурного моделирования и результаты стрельбы на полигонно-войсковых испытаниях, должно быть не менее 2, то есть:
, как показывают результаты полунатурного моделирования и результаты стрельбы на полигонно-войсковых испытаниях, должно быть не менее 2, то есть:

Учитывая соотношение (1), получим:

Подставляя в (8) соотношения (2) и (5), получим:

где t0 - полетное время ракеты, выстреливаемой раньше до точки пересечения управляющих лучей.
С учетом соотношения (4) неравенство (9) можно переписать в виде:
или, разрешая его относительно ΔtР, будем иметь:

Из рассмотрения ΔОКЕ и ΔOC'E' (см. фиг.1) следует:
или
откуда

Учитывая, что

выражение для определения требуемого интервала времени между пусками ракет, при котором для ракеты, выстреливаемой раньше, воздействие излучения луча соседнего комплекса, при пролете области наложения, не ухудшает точностные характеристики выделения сигналов координат ракеты относительно оси "своего" луча, примет вид:

Выражение (13) является необходимым, но не достаточным условием для определения интервала времени между пусками ракет, поскольку оно не учитывает условия, при которых не происходит перезахват ракеты, выстреливаемой позже, в луч соседнего комплекса.
Очевидно, что перезахват ракеты лучом соседнего комплекса не произойдет в том случае, если расстояние, проходимое ракетой за время Δt=Δt1+Δt2 (см. фиг2), необходимое для изменения направления траектории, приводящего к переходу ее в луч соседнего комплекса, будет больше "длины" области наложения двух лучей ВВ'=Х (см. фиг.1) и ракета не успеет перейти в указанный луч, то есть:

где Δt1 - время полета ракеты под действием команд управления, формируемых лучом соседнего комплекса в направлении к его оси;
Δt2 - время полета ракеты под действием команд управления, формируемых лучом соседнего комплекса в направлении удержания ракеты в указанном луче.
Временные параметры Δt1, Δt2 определяются через динамические характеристики ракеты.
Уравнение движения ракеты на участке времени 0tΔt1 (см. фиг.2) имеет вид:

где Y - отклонение ракеты от оси луча соседнего комплекса, ракета которого выстреливается раньше;
W - максимальное нормальное ускорение, развиваемое ракетой;
 - начальная скорость изменения координаты Y (в момент входа в область наложения двух лучей);
- начальная скорость изменения координаты Y (в момент входа в область наложения двух лучей);
t - время, отсчитываемое от момента входа в область наложения двух лучей.
Параметры W и (см. фиг.2) определяются по формулам:
где n - средняя располагаемая перегрузка ракеты;
g - ускорение свободного падения.
С учетом последнего выражения уравнение движения ракеты на участке 0tΔt1 имеет вид:

Решение уравнения (17) представляется выражением:

где Y0=hП.
Таким образом, выражение (18) позволяет определить интервал времени Δt1 из условия  (см. фиг.2):
(см. фиг.2):

Уравнение движения ракеты на участке времени t>Δt1 имеет вид:

где 

Или:

Из условия  по уравнению (21) можно определить Δt2:
по уравнению (21) можно определить Δt2:

С учетом (19), (22) неравенство (14) примет вид:

Принимая, для усиления неравенства (23) hП=h и обозначая через ХДОП выражение в левой части неравенства, условие отсутствия перезахвата ракеты, выстреливаемой позже, лучом соседнего комплекса запишется в виде:

где 
Параметры γ и Х находятся из фиг.1.
Из Δ ОАВ:
 .
.
Исходя из того, что ВО=Х/2 и ОА=hП, параметр Х будет равен:
или

Из Δ ОКЕ
При допущении, что sinγ≅γ,  с учетом выражения (11) параметры γ и Х определяются следующими выражениями:
с учетом выражения (11) параметры γ и Х определяются следующими выражениями:


Учитывая, что на участке полета ракеты ВВ' размер луча "помехи" для нее практически не изменяется и равен ее размеру в точке О, в которой (как следует из зависимости (5)):
зависимость (28) можно переписать в виде:

Подставляя выражение (29) в неравенство (24) и разрешая его относительно ΔtР с учетом зависимости (11) и (12), будем иметь:

Таким образом, совместное решение неравенств (13) и (30) позволяет математически однозначно определить допустимый интервал времени ΔtР между пусками ракет двух комплексов, при котором, с одной стороны для ракеты, выстреливаемой раньше, луч соседнего комплекса не ухудшает точностные характеристики аппаратуры выделения сигналов координат ракеты относительно оси "своего" луча, а с другой стороны ракета, выстреливаемая позже, не переходит в луч соседнего комплекса.
Математически это можно записать следующим образом:

где

На фиг.3 в качестве примера приведены требуемые значения интервала времени ΔtР между пусками двух ракет при перекрестной стрельбе двумя комплексами в зависимости от дальности стрельбы и расстояния между целями при следующих исходных характеристиках:
V=300 м/с, n=5, h=3 м, g=9.8 м/с2, l=50 м.
Предлагаемый способ наведения управляемых по лучу ракет близкорасположенных комплексов позволяет существенно повысить эффективность их перекрестной стрельбы за счет разнесения во времени моментов запуска ракет на время ΔtР, определяемого исходя из взаимного расположения комплексов и целей, обеспечивающего устойчивое наведение каждой ракеты в поле управления "своего" луча и исключающего врезание одной из ракет в землю или переход другой ракеты в поле управления луча соседнего комплекса.
Предлагаемый способ будет особенно эффективен в боевых действиях с применением комплексов, оснащенных различными типами боеприпасов (осколочно-фугасными, кумулятивными, и т.п.) против группировки противника, имеющей широкий класс объектов поражения (бронетехнику, автомобильный транспорт, инженерные сооружения).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ РАКЕТ, УПРАВЛЯЕМЫХ ПО ЛУЧУ ЛАЗЕРА, И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569045C1 |
| СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479818C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2012 |
|
RU2481541C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2010 |
|
RU2439462C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЗЕНИТНОГО РАКЕТНО-ПУШЕЧНОГО КОМПЛЕКСА | 2012 |
|
RU2506523C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2213318C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
Изобретение относится к области вооружения и может быть использовано в комплексах танкового и противотанкового управляемого вооружения с лучевой системой телеориентирования ракеты в луче лазера. Технический результат - повышение эффективности наведения ракет при перекрестной стрельбе двумя ракетными комплексами. Согласно изобретению при перекрестной стрельбе двумя комплексами ракет по двум целям, после обнаружения и распознавания целей первого и второго комплекса, измеряют расстояние между комплексами, расстояние между целями, расстояния от комплексов до целей, определяют угол γ между осями лучей первого и второго комплекса. Если угол γ≤5.5°, то время между запусками ракет первого и второго комплексов выбирают путем решения математических уравнений, исходя из условий, чтобы для ракеты, выстреливаемой раньше, луч соседнего комплекса не ухудшал точностные характеристики аппаратуры выделения сигналов координат ракеты относительно «своего» луча, а с другой стороны ракета, выстреливаемая позже, не переходила в луч соседнего комплекса. 3 ил.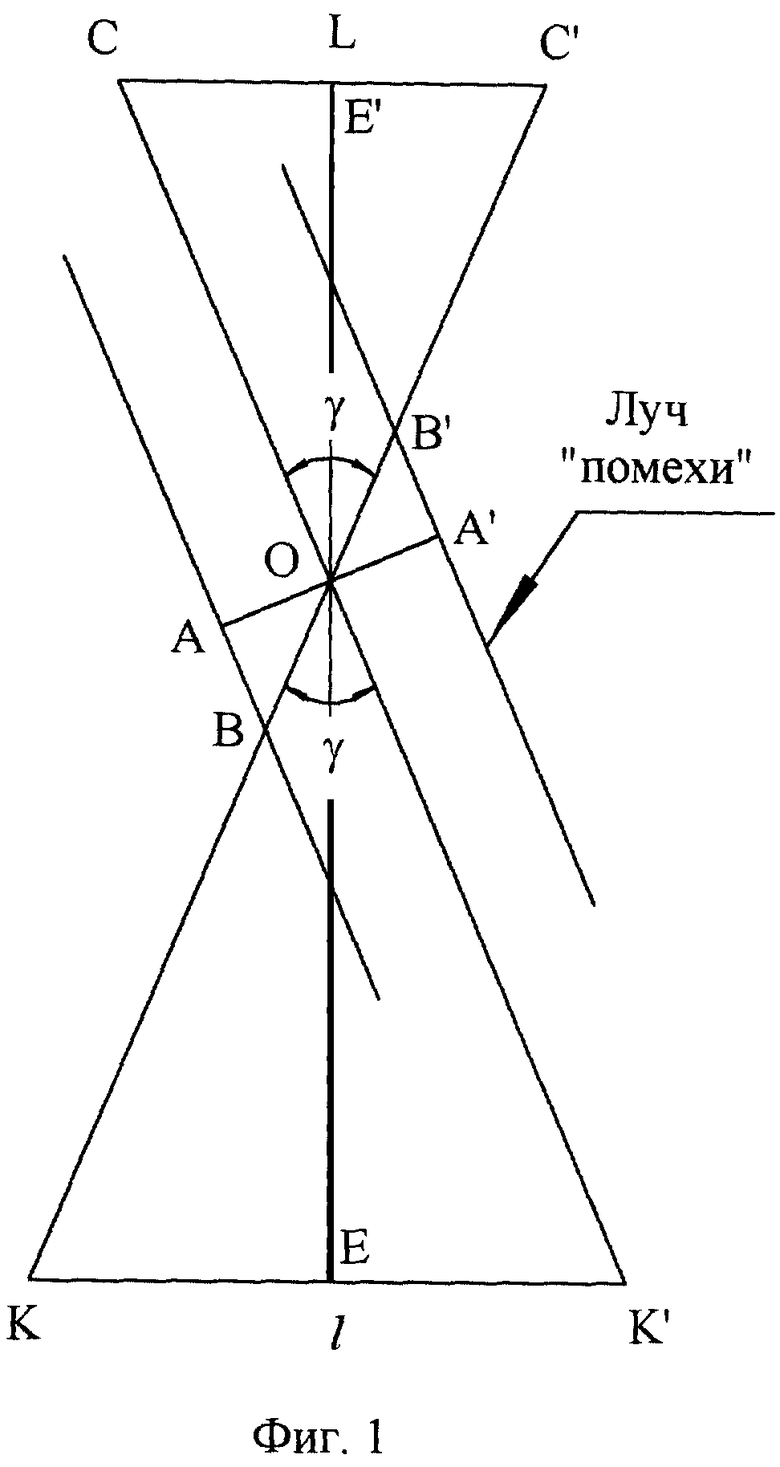
Способ наведения на цель ракет, управляемых по лучу, включающий обнаружение и распознавание цели, формирование управляющего луча, наведение управляющего луча на цель и формирование сигналов управления ракетой, отличающийся тем, что при перекрестной стрельбе двумя комплексами ракет по двум целям, после обнаружения и распознавания целей первого и второго комплекса, измеряют расстояние между комплексами 1, расстояние между целями L, расстояния от комплексов до целей DСТР, определяют угол  между осями лучей первого и второго комплексов и, если угол γ≤5,5°, то время между запусками ракет первого и второго комплексов выбирают по максимальному значению интервалов времени τ1 и τ2, определяемых из соотношений
между осями лучей первого и второго комплексов и, если угол γ≤5,5°, то время между запусками ракет первого и второго комплексов выбирают по максимальному значению интервалов времени τ1 и τ2, определяемых из соотношений
V - средняя скорость полета ракеты;
h - радиус поперечного сечения управляющего луча;
n - располагаемая перегрузка ракеты;
g - ускорение свободного падения.
| АНГЕЛЬСКИЙ Р | |||
| Отечественные противотанковые комплексы | |||
| Иллюстрированный справочник | |||
| - М.: ACT, Астрель, 2002, с.52, 112, 114 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

