Предлагаемая группа изобретений относится к области разработки систем наведения (СН) ракет и может быть использована в ракетных комплексах (РК) ПТУР и ЗУР.
Одной из задач, решаемых при разработке РК, является повышение эффективности поражения целей.
Известен способ наведения ракеты по лучу / Ангельский Р.Д. Отечественные противотанковые комплексы. Иллюстрированный справочник. - М: АСТ, Астрель, с. 112-114, 127/, включающий формирование управляющего лазерного луча, его наведение на цель и формирование сигналов управления ракетой, применяемый в противотанковых и танковых РК «Кастет», «Бастион», «Шексна», «Свирь», «Рефлекс», «Разрыв».
РК, реализующий этот способ / Ангельский Р.Д. Отечественные противотанковые комплексы. Иллюстрированный справочник. - М.: АСТ, Астрель, с. 112-114, 127/, включает прицел с источником лазерного излучения и управляемую ракету с приемником лазерного излучения и формирователем сигналов управления. После выстрела ракеты прицел наводится на цель оператором. Аппаратура управления ракеты принимает лазерное излучение, вырабатывает сигналы, пропорциональные ее отклонениям относительно центра излучения (оси луча), и формирует команды управления рулями, отклонение которых возвращает ракету к оси луча. Таким образом, осуществляется режим полуавтоматического сопровождения цели.
Такой способ наведения позволяет поражать цель последовательными одиночными выстрелами ракет. Недостатком данного способа и реализующего его РК является возможное наложение или пересечение лучей при необходимости поражения двух целей двумя ракетами, запускаемыми с двух близкорасположенных РК, что может приводить к срыву наведения или «захвату» ракеты лучом «чужого» комплекса.
Способ наведения, применяемый в радиокомандной СН РК «Штурм» / Ангельский Р.Д. Отечественные противотанковые комплексы. Иллюстрированный справочник. - М: АСТ, Астрель, с. 84-87 /, позволяет производить разную кодировку сигналов управления на ракетах и носителях, причем частота и код импульсов команд управления на ракете соответствует «своему» носителю, что обеспечивает возможность стрельбы группой близкорасположенных носителей (до 10) по нескольким целям.
РК, реализующий этот способ / Ангельский Р.Д. Отечественные противотанковые комплексы. Иллюстрированный справочник. - М.: АСТ, Астрель, с. 84-87/, включает ракету с инфракрасным излучателем, элементами радиокомандной системы управления и радиоантенной, а также прицельное устройство носителя (вертолета или боевой машины) с пеленгатором инфракрасного излучения и передатчиком радиокоманд.
Недостатком данного способа и реализующего его РК является отсутствие возможности стрельбы с одного носителя по двум целям и низкая помехозащищенность радиокомандной СН относительно лазерно-лучевой СН.
Существует РК «Хризантема», который обеспечивает практически одновременную стрельбу с одного носителя двумя ракетами по двум целям. Способ наведения, применяемый в этом комплексе / Ангельский Р.Д. Отечественные противотанковые комплексы. Иллюстрированный справочник. - М.: АСТ, Астрель, с. 159, 160/, включает обнаружение и распознавание двух целей, автоматическое сопровождение первой цели, пуск первой ракеты с управлением по радиоканалу, полуавтоматическое сопровождение второй цели и пуск второй ракеты с управлением по лазерному лучу.
РК, реализующий этот способ / Ангельский Р.Д. Отечественные противотанковые комплексы. Иллюстрированный справочник. - М.: АСТ, Астрель, с. 159, 160/, включает две независимых СН: радиокомандную СН, аналогичную используемой в комплексе «Штурм», и лазерно-лучевую СН, аналогичную используемой в комплексах «Кастет», «Бастион», «Шексна», «Свирь», «Рефлекс», «Разрыв», а также радиолокационную станцию (РЛС) обнаружения и автоматического сопровождения цели. Ракета в таком РК содержит элементы как радиокомандной, так и лучевой СН.
Двухканальная СН РК «Хризантема» обеспечивает эффективность применения в различных условиях, поскольку помимо обеспечения одновременной стрельбы двумя ракетами по двум целям, в случае одиночного выстрела может быть использована на выбор либо радиокомандная СН, либо лазерно-лучевая СН.
Но такой способ наведения и РК с двухканальной СН обладает недостатком - значительным усложнением аппаратуры управления как на носителе, так и на ракете. Наличие на ракете элементов и радиокомандной, и лучевой СН приводит к увеличению габаритов, массы и стоимости бортовой аппаратуры.
Наиболее близким к предлагаемому является способ наведения на цель ракет, управляемых по лучу лазера / патент RU 2135391, МПК6 B63G 1/00, 27.08.99/, включающий обнаружение и распознавание цели, формирование управляющего лазерного луча, автоматическое наведение его на цель, встреливание ракеты в луч, прием ракетой излучения луча и формирование сигналов управления ракетой.
РК, реализующий этот способ / патент RU 2135391, МПК6 B63G 1/00, 27.08.99/, включает две подъемно-поворотные платформы (ППП) с приводами, на одной из которых расположена управляемая ракета (УР), содержащая блок управления (БУ) и электрически связанный с ним приемник излучения (ПИ) в ее заднем торце, а на другой - теплотелевизионный прицел (ТПТВП) и лазерно-лучевой блок (ЛЛБ), оптически связанный с ПИ в процессе полета ракеты. РК содержит также пульт управления (ПУ), первый выход которого связан со вторым входом БУ, второй выход - с первым входом вычислителя, а третий выход - с первым входом приводов второй ППП; автомат сопровождения целей (АСЦ), вход которого связан с выходом ТПТВП, а выход - со вторым входом приводов второй ППП; датчики углов (ДУ) поворота по углам азимута и места, механически связанные со второй ППП, выход которых соединен со вторым входом вычислителя. Вычислитель связан по своим выходам с входом приводов первой ППП, входом ЛЛБ и первым входом блока отображения информации (БОИ), второй вход которого связан с выходом ТПТВП.
При обнаружении и распознавании цели с помощью ТПТВП, изображение которого отображается на экране монитора БОИ, оператор переводит слежение в автоматический режим. При этом АСЦ управляет приводами второй ППП (с ТПТВП и ЛЛБ). Пуск ракеты производится подачей оператора команды с ПУ на БУ ракеты (нажатием кнопки «Пуск»). Встреливание ракеты в лазерный луч, создаваемый ЛЛБ, обеспечивается благодаря повороту первой ППП (с управляемой ракетой) на потребный угол, соответствующий повороту второй ППП, посредством связей через ДУ и вычислитель. После встреливания ракеты в луч ее ПИ преобразует оптические сигналы, поступающие с ЛЛБ, в электрические. Эти сигналы передаются в БУ, где формируются команды управления, обеспечивающие полет ракеты по оси луча лазера, съюстированной с осью ТПТВП, в результате чего ракета совершает полет по линии визирования цели.
Недостаток данного способа и реализующего его РК - отсутствие возможности одновременной стрельбы с одного носителя двумя ракетами по двум целям.
Задачей предлагаемой группы изобретений является обеспечение возможности стрельбы с одного носителя двумя ракетами по двум целям для повышения эффективности комплекса, производя выстрелы двух ракет практически одновременно: с интервалом между их пусками, значительно меньшим полетного времени ракеты до цели.
Поставленная задача решается за счет того, что в известном способе наведения на цель ракет, управляемых по лучу лазера, включающем обнаружение и распознавание цели, формирование управляющего лазерного луча, автоматическое наведение управляющего луча на цель, встреливание ракеты в луч, прием ракетой излучения луча и формирование сигналов управления ракетой новым является то, что при обнаружении и распознавании двух целей формируют на одном носителе два управляющих лазерных луча, смещенных друг относительно друга в горизонтальной плоскости, левый луч автоматически наводят на левую цель, правый луч автоматически наводят на правую цель, определяют угол γ между осями лучей по зависимости:

где ε1, ε2 - углы места левой и правой цели соответственно;
β1, β2 - углы азимута левой и правой цели соответственно,
и производят пуски двух ракет, каждую из которых встреливают в свой луч, причем если угол γ меньше начального углового размера луча, то лучи формируют с различными параметрами излучения, на каждой из ракет до старта устанавливают адрес, соответствующий параметрам излучения своего луча, в процессе полета ракет дешифрируют аппаратурами каждой из них принимаемые от лучей сигналы в соответствии с этими адресами, а минимальный интервал времени τmin между пусками ракет определяют из условия:

где  - коэффициент, характеризующий максимально возможный разброс средней скорости полета ракеты;
- коэффициент, характеризующий максимально возможный разброс средней скорости полета ракеты;
 - соответственно максимальное и минимальное значение средней скорости ракеты;
- соответственно максимальное и минимальное значение средней скорости ракеты;
tmax - максимальное полетное время ракеты до цели.
В РК, реализующем этот способ, включающем УР, содержащую последовательно соединенные ПИ и БУ, ППП с приводами, на которой расположены ТПТВП и ЛЛБ, оптически связанный с ПИ ракеты в процессе ее полета, вторую ППП с приводами, вычислитель, первый выход которого соединен с входом приводов второй ППП, второй выход соединен со входом БОИ, а третий выход соединен со входом ЛЛБ, ПУ, первый выход которого соединен со вторым входом БУ ракеты, второй выход соединен со входом вычислителя, а третий выход соединен со входом приводов первой ППП, АСЦ, вход которого соединен с выходом ТПТВП, а выход соединен со вторым входом приводов первой ППП, ДУ поворота по углам азимута и места, механически связанные с первой ППП, выход которых соединен со вторым входом вычислителя, причем второй вход БОИ соединен с выходом ТПТВП новым является то, что в него введены вторая УР, механически связанная со второй ППП и содержащая последовательно соединенные второй ПИ и второй БУ, второй ТПТВП и второй ЛЛБ, оптически связанный с ПИ второй ракеты, установленные на второй ППП, второй ПУ, первый выход которого соединен со вторым входом БУ второй ракеты, второй выход соединен с третьим входом вычислителя, а третий выход соединен со вторым входом приводов второй ППП, второй АСЦ, вход которого соединен с выходом второго ТПТВП, а выход соединен со третьим входом приводов второй ППП, вторые ДУ поворота по углам азимута и места, механически связанные со второй ППП, выход которых соединен с четвертым входом вычислителя, второй БОИ, первый вход которого соединен с четвертым выходом вычислителя, а второй вход соединен с выходом второго ТПТВП, система обнаружения и указания целей (СОУЦ), выход которой соединен с пятым входом вычислителя, пятый выход вычислителя соединен со входом второго ЛЛБ, шестой выход вычислителя соединен с третьим входом приводов первой ППП, седьмой выход вычислителя соединен со входом первого ПУ, а восьмой выход вычислителя соединен со входом второго ПУ, при этом первая УР механически связана с первой ППП.
Предлагаемая группа изобретений поясняется графическим материалом.
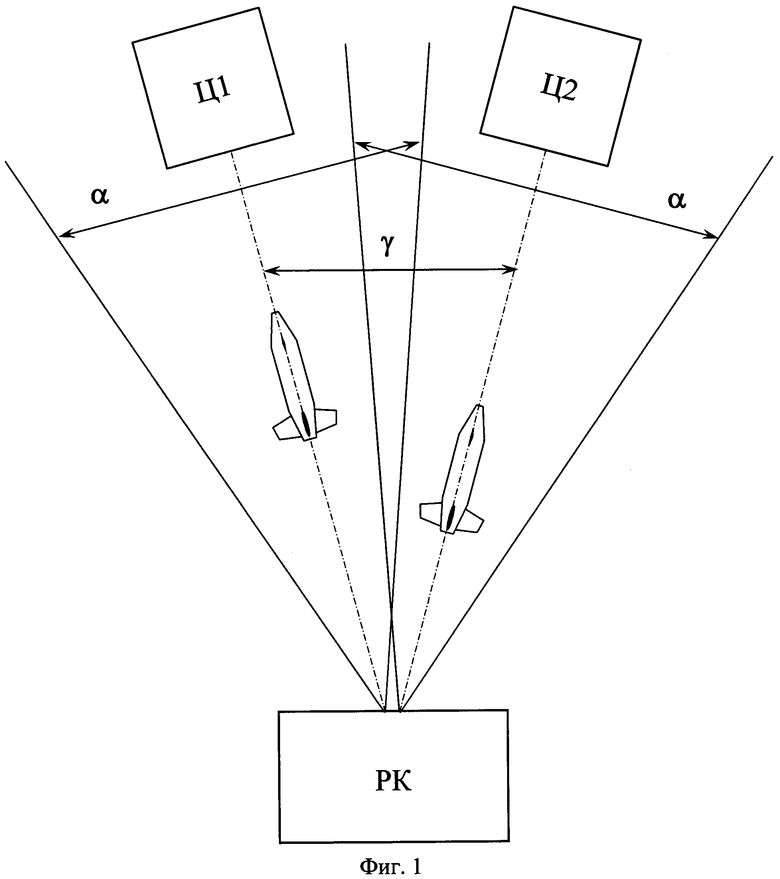
На фиг. 1 изображено возможное расположение целей и лучей при их частичном наложении (вид сверху), где Ц1, Ц2 - первая и вторая цели; α - начальный угловой размер луча.
На фиг. 2 приведена структура предлагаемого РК, где 1 - первая УР (УР1), 2 - ПИ первой УР (ПИ1), 3 - БУ первой УР (БУ1), 4 - первая ППП (ППП1), 5 - первый ТПТВП (ТПТВП1), 6 - первый ЛЛБ (ЛЛБ1), 7 - привода ППП1 (П1), 8 - первый АСЦ (АСЦ1), 9 - первый БОИ (БОИ1), 10 - первый ПУ (ПУ1), 11 - первые ДУ (ДУ1), 12 - вычислитель (В), 13 - вторая УР (УР2), 14 - ПИ второй УР (ПИ2), 15 - БУ второй УР (БУ2), 16 - вторая ППП (ППП2), 17 - второй ТПТВП (ТПТВП2), 18 - второй ЛЛБ (ЛЛБ2), 19 - привода ППП2 (П2), 20 - второй АСЦ (АСЦ2), 21 - второй БОИ (БОИ2), 22 - второй ПУ (ПУ2), 23 - вторые ДУ (ДУ2), 24 - СОУЦ.
Электрические связи на фиг. 2 изображены сплошными одинарными линиями; механические связи - сплошными двойными линиями; оптические связи - штриховыми линиями.
Сущность предлагаемого способа заключается в следующем. Два луча формируют в двух блоках, которые расположены на носителе приблизительно на одном уровне по вертикали и с некоторым смещением друг относительно друга в горизонтальной плоскости (но близко друг от друга, например, 1,0-1,5 м), что обусловлено ограниченными геометрическими размерами носителей типа боевая машина или вертолет. При стрельбе двумя ракетами по двум целям наведение левого луча на левую цель, а правого луча - на правую цель обеспечивает отсутствие пересечения их осей. Однако в случае близкого расположения целей возможно частичное наложение лучей (фиг. 1), поскольку лучи на носителе расположены в непосредственной близости, а размер лазерного луча составляет в линейной мере 3,0…6,0 м, например, в ПТРК «MAPATS», Израиль и «Red Arrow 9», Китай / Высокоточное оружие зарубежных стран. Том 1. ПТРК: обзорно-аналитический справочник. КБП, ГУП, Тула, «Бедретдинов и Ко», 2008, с. 275, 278, 320/.
В угловой мере максимальный размер луча - его начальное значение α. По мере удаления ракеты угловой размер луча уменьшается обратно пропорционально увеличению дальности до ракеты, что обеспечивает приблизительное постоянство линейного размера луча посредством изменения фокусного расстояния в оптической системе лазерно-лучевого канала / см., например, патент RU 2126522, МПК6 F41G 7/26, F42B 15/00, 20.02.99/.
Угол γ между осями лучей определяют по известной геометрической зависимости для направляющих косинусов / Бронштейн И.Н., Семендяев К.А. Справочник по математике. - М.: Наука, 1965, с 218/
cosγ=cos(ε1-ε2)cos(β1-β2),
откуда вытекает выражение (1), где углы места целей (в вертикальной плоскости) традиционно отсчитываются относительно линии горизонта, а углы азимута целей (в горизонтальной плоскости) - относительно направления на север.
Очевидно, что в случае, когда угол γ больше начального углового размера луча α, стрельба может производиться без каких-либо ограничений. Если угол γ меньше начального углового размера луча α, то возможно наложение лучей. При этом необходимо:
формировать лучи с различными параметрами излучения и на каждой из ракет до старта устанавливать адрес, соответствующий параметрам излучения «своего» луча, что обеспечивает полет каждой из ракет (посредством дешифрации аппаратурами каждой из них принимаемых от лучей сигналов в соответствии с этими адресами) в «своем» луче при их наложении;
избежать столкновения ракет в полете в случае, если скорость второй ракеты окажется несколько больше скорости первой.
Минимальное допустимое время τmin между пусками ракет определяется из условия того, что вторая ракета не догонит первую даже в случае, если средняя скорость Vcp полета первой ракеты до цели - минимально возможная  а средняя скорость второй ракеты - максимально возможная
а средняя скорость второй ракеты - максимально возможная  Условием того, что вторая ракета догонит первую, является совпадение их дальностей:
Условием того, что вторая ракета догонит первую, является совпадение их дальностей:

Учитывая, что  получаем:
получаем:

откуда
т.е. получаем условие (2).
Поскольку полет ракет проходит в одинаковых климатических условиях, разброс скоростей, характеризуемый коэффициентом KV, вызван преимущественно возможным отличием тяги двигателя ракет и обычно этот коэффициент составляет 1,02…1,05.
Например, для определенного класса ракет KV = 1,03; полетное время на максимальную дальность tmax = 38,0 с. По зависимости (2) получаем τmin = 1,1 с, что существенно меньше tmax.
РК (фиг. 2) работает следующим образом.
СОУЦ 24 обнаруживает одну или две цели и передает в В12 их угловые координаты ε1, ε2 (углы места) и β1, β2 (углы азимута), а также дальности до целей. При стрельбе по одной цели РК функционирует аналогично прототипу с тем лишь отличием, что УР1 1 и УР2 13 механически связаны с ППП1 4 (с ТПТВП1 5 и ЛЛБ1 6) и ППП2 16 (с ТПТВП2 17 и ЛЛБ2 18) соответственно, в то время как в прототипе УР и ТПТВП с ЛЛБ расположены на разных ППП.
При обнаружении и передаче координат двух целей В12 распределяет цели как левая и правая и по выходам 6 и 1 передает сигналы на соответствующий разворот ППП1 4 и ППП2 16 с помощью П1 7 и П2 19. Блок В12 производит также вычисление угла γ между осями лучей по зависимости (1) и сравнение этого значения с заложенной в памяти величиной начального углового размера луча α.
В случае, когда угол γ больше начального углового размера луча α, стрельба двумя ракетами может производиться без каких-либо ограничений (даже одновременно и с одинаковыми параметрами излучений). Если угол γ меньше начального углового размера луча α, в В12 устанавливается условие (2) по минимальному интервалу времени между пусками УР. Оператор устанавливает на ПУ1 10 и ПУ2 22 различные параметры излучения, которые передаются в ракеты соответственно на БУ1 3 и БУ2 15. Такие же параметры излучения устанавливаются в ЛЛБ1 6 и ЛЛБ2 18 при их включении через В12 по выходам 3 и 5.
АСЦ1 8 и АСЦ2 20 обеспечивают автоматическое слежение за целями путем обработки изображения ТПТВП1 5 и ТПТВП2 17, например, по контрастно-корреляционному методу аналогично прототипу. Оператор также имеет возможность ручного сопровождения целей (например, с помощью кнюппелей) по третьим выходам с ПУ1 10 и ПУ2 22.
Оператор может одновременно (или практически одновременно) нажать 2 кнопки «Пуск» на ГТУ2 10 и ПУ2 22. При этом В12 автоматически обеспечивает пуск второй из ракет по цепи с его выхода 7 или 8 не ранее, чем через время τmin по условию (2).
После встреливания ракет в «свои» лучи с различными параметрами излучения на каждой из них производится дешифрация принимаемых ПИ1 2 и ПИ2 14 от лучей оптических сигналов в соответствии с установленными до пуска адресами.
Телевизионное или тепловизионное изображение, а также вся необходимая информация с В12 (значения углов с ДУ1 11, ДУ2 23, адреса, дальности до целей, режимы стрельбы и т.п.) выводится на мониторы БОИ1 9 и БОИ2 21.
Следует отметить, что конструктивная реализация предлагаемого РК более проста и компактна по сравнению с прототипом, где прицел и ракета расположены на двух разных ППП, что связано со спецификой применения прототипа на патрульном катере. Для носителей сравнительно малых габаритов (боевая машина, вертолет) предлагаемый РК более рационален по размещению на ней двух модулей с прицелами, ЛЛБ и ракетами.
В качестве СОУЦ может быть использована РЛС, например, типа RASCAR/Зарубежное военное обозрение, №3, 1995/ или применяемая в РК «Хризантема» / Ангельский Р.Д. Отечественные противотанковые комплексы. Иллюстрированный справочник. - М.: АСТ, Астрель, с. 159/. В случае размещения РЛС на другом носителе сигналы могут передаваться, например, спутниковыми навигационными средствами.
В качестве остальных элементов, входящих в состав РК, могут быть использованы устройства, представленные в прототипе / патент RU 2135391, МПК6 B63G 1/00, 27.08.99/.
Формирование лучей с различными параметрами излучения и установка адреса на ЛЛБ и ракетах могут быть реализованы согласно патенту RU 2266509, МПК7 F41G 7/24, 20.12.05.
Применение предлагаемой группы изобретений обеспечивает повышение эффективности РК. Такое техническое решение позволяет осуществлять стрельбу с одного носителя двумя ракетами по двум целям, производя выстрелы двух ракет практически одновременно: с интервалом между их пусками, значительно меньшим полетного времени ракеты до цели.
РК с высокоточным лазерно-лучевым управлением обеспечивает возможность поражения как наземных целей - объектов бронетанковой техники, в том числе малоразмерных (танк в окопе, ДОТ, ДЗОТ и т.п.), так и малоскоростных (до 250 м/с) низколетящих воздушных целей (вертолет, самолет штурмовой авиации, беспилотный летательный аппарат). Предлагаемая группа изобретений позволяет производить одновременную стрельбу по двум целям в любой комбинации: по двум наземным, по двум воздушным, по наземной и воздушной.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| Двухсистемная управляемая ракета в транспортно-пусковом контейнере | 2023 |
|
RU2814065C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| УПРАВЛЯЕМАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2012 |
|
RU2518126C2 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2009 |
|
RU2394202C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| Способ одновременного наведения управляемых ракет с лазерными полуактивными головками самонаведения и устройство для его осуществления | 2017 |
|
RU2657356C1 |
Предлагаемая группа изобретений относится к области разработки систем наведения ракет и может быть использована в комплексах ПТУР и ЗУР. Подобный ракетный комплекс включает две управляемые ракеты, содержащие последовательно соединенные приемники излучения и блок управления. Входят также подъемно-поворотные платформы с приводами, на которых расположены теплотелевизионные прицелы и лазерно-лучевой блок, оптически связанный с приемником излучения ракет. Для реализации поставленных перед системой задач используются вычислитель, блоки отображения информации, пульты управления, автоматы сопровождения целей и датчики углов поворота по углам азимута и места, расположенные на подъемно-поворотных платформах. Комплекс также включает систему обнаружения и указания целей. Указанное устройство реализует соответствующий способ наведения ракет. Технический результат - обеспечение возможности стрельбы с одного носителя двумя ракетами по двум целям для повышения эффективности комплекса. 2 н.п. ф-лы, 2 ил.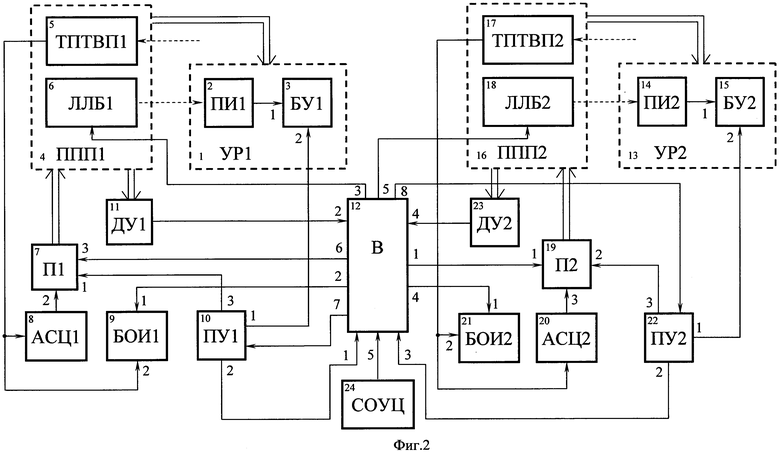
1. Способ наведения на цель ракет, управляемых по лучу лазера, включающий обнаружение и распознавание цели, формирование управляющего лазерного луча, автоматическое наведение управляющего луча на цель, встреливание ракеты в луч, прием ракетой излучения луча и формирование сигналов управления ракетой, отличающийся тем, что при обнаружении и распознавании двух целей формируют на одном носителе два управляющих лазерных луча, смещенных друг относительно друга в горизонтальной плоскости, левый луч автоматически наводят на левую цель, правый луч автоматически наводят на правую цель, определяют угол γ между осями лучей по зависимости

где ε1, ε2 - углы места левой и правой цели соответственно;
β1, β2 - углы азимута левой и правой цели соответственно,
и производят пуски двух ракет, каждую из которых встреливают в свой луч, причем если угол γ меньше начального углового размера луча, то лучи формируют с различными параметрами излучения, на каждой из ракет до старта устанавливают адрес, соответствующий параметрам излучения своего луча, в процессе полета ракет дешифрируют аппаратурами каждой из них принимаемые от лучей сигналы в соответствии с этими адресами, а минимальный интервал времени τmin между пусками ракет определяют из условия
где  - коэффициент, характеризующий максимально возможный разброс средней скорости полета ракеты;
- коэффициент, характеризующий максимально возможный разброс средней скорости полета ракеты;
 - соответственно максимальное и минимальное значение средней скорости ракеты;
- соответственно максимальное и минимальное значение средней скорости ракеты;
tmax - максимальное полетное время ракеты до цели.
2. Ракетный комплекс, включающий управляемую ракету, содержащую последовательно соединенные приемник излучения и блок управления, подъемно-поворотную платформу с приводами, на которой расположены теплотелевизионный прицел и лазерно-лучевой блок, оптически связанный с приемником излучения ракеты в процессе ее полета, вторую подъемно-поворотную платформу с приводами, вычислитель, первый выход которого соединен со входом приводов второй подъемно-поворотной платформы, второй выход соединен со входом блока отображения информации, а третий выход соединен со входом лазерно-лучевого блока, пульт управления, первый выход которого соединен со вторым входом блока управления ракеты, второй выход соединен со входом вычислителя, а третий выход соединен со входом приводов первой подъемно-поворотной платформы, автомат сопровождения целей, вход которого соединен с выходом теплотелевизионного прицела, а выход соединен со вторым входом приводов первой подъемно-поворотной платформы, датчики углов поворота по углам азимута и места, механически связанные с первой подъемно-поворотной платформой, выход которых соединен со вторым входом вычислителя, причем второй вход блока отображения информации соединен с выходом теплотелевизионного прицела, отличающийся тем, что в него введены вторая управляемая ракета, механически связанная со второй подъемно-поворотной платформой и содержащая последовательно соединенные второй приемник излучения и второй блок управления, второй теплотелевизионный прицел и второй лазерно-лучевой блок, оптически связанный с приемником излучения второй ракеты, установленные на второй подъемно-поворотной платформе, второй пульт управления, первый выход которого соединен со вторым входом блока управления второй ракеты, второй выход соединен с третьим входом вычислителя, а третий выход соединен со вторым входом приводов второй подъемно-поворотной платформы, второй автомат сопровождения целей, вход которого соединен с выходом второго теплотелевизионного прицела, а выход соединен со третьим входом приводов второй подъемно-поворотной платформы, вторые датчики углов поворота по углам азимута и места, механически связанные со второй подъемно-поворотной платформой, выход которых соединен с четвертым входом вычислителя, второй блок отображения информации, первый вход которого соединен с четвертым выходом вычислителя, а второй вход соединен с выходом второго теплотелевизионного прицела, система обнаружения и указания целей, выход которой соединен с пятым входом вычислителя, пятый выход вычислителя соединен со входом второго лазерно-лучевого блока, шестой выход вычислителя соединен с третьим входом приводов первой подъемно-поворотной платформы, седьмой выход вычислителя соединен со входом первого пульта управления, а восьмой выход вычислителя соединен со входом второго пульта управления, при этом первая управляемая ракета механически связана с первой подъемно-поворотной платформой.
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| СПОСОБ НАВЕДЕНИЯ НА ЦЕЛЬ РАКЕТ, УПРАВЛЯЕМЫХ ПО ЛУЧУ | 2006 |
|
RU2315939C1 |

