ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к портативным или мобильным устройствам, которые включают в себя приемник, такой как приемник спутниковой системы позиционирования, измерения от которого используются для обеспечения измерения местоположения устройства.
УРОВЕНЬ ТЕХНИКИ
Многие пожилые люди в настоящее время носят персональные кнопки вызова помощи (PHB) или персональные системы экстренного реагирования (PERS), которые они могут активировать, если нуждаются в срочной помощи, например, когда они упали. Также доступны автоматизированные детекторы падения, которые отслеживают движения пользователя и автоматически инициируют предупредительный сигнал, если обнаружено падение.
Эти устройства (то есть, PHB, PERS и детекторы падения) при их активации могут инициировать вызов по наземной линии связи через базовый блок, расположенный вблизи пользователя (то есть, обычно в доме пользователя), в специализированный телефонный центр, и персонал в телефонном центре может пообщаться с пользователем и принять меры, чтобы пользователю была направлена помощь в экстренной ситуации. Поскольку пользователь является зарегистрированным подписчиком сервиса PHB/PERS, местонахождение его дома (или другое местонахождение, в котором находится базовая станция) будет известно, и экстренная помощь может быть направлена персоналом телефонного центра в это местонахождение.
Однако в настоящее время доступны системы, использующие мобильный телефон или другое устройство с поддержкой мобильной связи, которое носит пользователь, чтобы позволить PHB, PERS или устройству детектора падения инициировать вызов в телефонный центр по сети мобильной связи. Эти устройства иногда называются мобильными устройствами PERS (MPERS) и могут использоваться везде, где имеется покрытие сотовой связи. Поскольку типичные пользователи этих устройств MPERS являются пожилыми людьми или имеют некоторые формы физических или умственных нарушений, важно, чтобы устройства были насколько возможно простыми в работе. В результате функциональность мобильной связи предпочтительно интегрирована в специализированный кулон PHB или PERS, который носит пользователь, и который обычно имеет только одну кнопку активации или очень небольшое количество элементов ручного управления. При активации устройства MPERS автоматически выполняется вызов по номеру телефонного центра, предварительно установленному в устройстве.
Также для этих устройств MPERS желательно, чтобы они были в состоянии определять местонахождение устройства (и, таким образом, пользователя), когда произошло событие, такое как падение или нажатие пользователем кнопки PHB для запроса помощи, и передавать это местонахождение в телефонный центр или службы экстренной помощи, чтобы легко определить местонахождение пользователя.
В настоящее время спутниковые системы позиционирования, такие как GPS, являются одним из самых точных источников данных местонахождения, доступных переносным или мобильным электронным устройствам, таким как устройство MPERS. Однако имеется несколько недостатков, связанных со спутниковыми системами позиционирования. Например, может быть невозможно принять сигналы от спутников, когда устройство находится в закрытом помещении, под густой листвой или в "городском каньоне" (то есть, между несколькими высокими зданиями), что лишает возможности получать измерение местонахождения (иногда называемое "привязкой"). Спутниковые системы позиционирования также могут быть предрасположены к погрешностям в измерении местонахождения, которое может произойти вследствие многих различных причин, в том числе "многолучевости", когда сигналы от спутника могут отражаться от зданий, прежде чем достигнуть приемника спутниковой системы позиционирования. Эти погрешности могут привести к тому, что сообщенное местонахождение находится на некотором расстоянием от фактического местонахождения, иногда в нескольких городских кварталах. Другой недостаток спутниковых систем позиционирования состоит в том, что приемник потребляет относительно большое количество мощности, выполняя измерение местонахождения.
Хотя приемник спутниковой системы позиционирования может быть активирован и деактивирован вручную пользователем устройства, чтобы помочь уменьшить расход энергии, когда происходит некоторое событие, при котором полезно знать точное местонахождение устройства MPERS (например, если пользователь устройства делает экстренный вызов и должен предоставить свое точное местонахождение, или пользователь устройства падает или подвергается другому несчастному случаю, и устройство выполнено с возможностью автоматически запрашивать помощь для пользователя), активация приемника спутниковой системы позиционирования и попытка измерения имеют некоторый риск, поскольку может оказаться невозможно получить измерение в текущем местонахождении устройства.
Таким образом, в таких ситуациях может быть полезно использовать последнее известное местонахождение устройства, полученное с использованием приемника спутниковой системы позиционирования, прежде чем спутниковый сигнал был потерян (это иногда называется "обратным отслеживанием"). Чтобы сделать это, приемник спутниковой системы позиционирования должен либо непрерывно собирать измерения местонахождений (и это означает, что приемник быстро истощит батарею устройства), либо использовать методику "обратного отслеживания", в которой приемник спутниковой системы позиционирования выборочно активируется устройством, чтобы периодически принимать сигналы спутниковой системы позиционирования и выполнять измерения местонахождения. Поскольку приемник не включен или не активен непрерывно, имеется некоторое сокращение потребления энергии устройства. Если приемник не способен определить местонахождение устройства, когда он активирован, в качестве оценки текущего местонахождения устройства используется последнее полученное измерение местонахождения ("хлебная крошка").
Дополнительное затруднение состоит в том, что устройство может находиться в местонахождении, в котором покрытие мобильной сети связи является плохим, и которое позволяет передачу данных только на очень низких скоростях, что препятствует быстрой передаче большого количества данных местонахождения от устройства MPERS в телефонный центр или службы экстренной помощи. Поэтому должна быть минимизирована необходимость передавать большое количество данных местонахождения от устройства MPERS.
Таким образом, имеется необходимость улучшить существующие методики обратного отслеживания для максимизации времени работы батареи и уменьшения частоты, с которой пользователь должен перезаряжать или заменять батареи, максимизируя шанс, что устройство может обеспечить точное измерение местонахождения или местоположения, когда требуется.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом изобретения обеспечен способ определения местоположения устройства с использованием спутниковой системы позиционирования, способ содержит этапы, на которых (a) управляют приемником спутниковой системы позиционирования в устройстве для сбора нескольких наборов сигналов; и когда должна быть определено местоположение устройства, (b) обрабатывают набор сигналов, чтобы определить, будет ли набор вероятно содержать сигналы от спутников в спутниковой системе позиционирования; и (c) если на этапе (b) определено, что набор сигналов будет вероятно содержать сигналы от спутников в спутниковой системе позиционирования, обрабатывают набор сигналов для вычисления местоположения устройства; (d) если на этапе (b) определено, что набор сигналов будет маловероятно содержать сигналы от спутников в спутниковой системе позиционирования, повторяют этапы (b), (c) и (d) с другим набором сигналов. Поскольку обработка набора сигналов, чтобы определить, будет ли набор вероятно содержать сигналы от спутников, в соответствии с изобретением требует намного меньшего объема обработки и мощности, чем полная обработка сигналов для определения местоположения устройства, для устройства возможно собрать и оценить требуемую полезность набора дискретных сигналов, максимизируя время работы батареи устройства.
Предпочтительно другой набор сигналов представляет собой набор сигналов, собранных перед набором сигналов, обработанных в этапе (b). Это приводит к тому, что способ выполняет "обратное отслеживание" по собранным наборам дискретных сигналов, пока не будет найден набор, который может использоваться для определения местоположения устройства.
Предпочтительно этап (b) содержит поиск в наборе сигналов кодов, используемых одним или более спутниками в спутниковой системе позиционирования. Каждый код обычно уникален для конкретного спутника в спутниковой системе позиционирования. В случае, когда способ применен к GPS, код представляет собой код PRN.
Предпочтительно этап (b) содержит определение кодов, соответствующих одному или более спутникам в спутниковой системе позиционирования, ожидаемые в поле видимости устройства в то время, когда был собран набор сигналов. Это означает, что вычислительная мощность и время не потрачены впустую при поиске кодов, связанных со спутниками, которые маловероятно будут находиться в поле видимости устройства.
Этап определения кодов может содержать получение кодов из таблицы поиска, что уменьшает обработку, требуемую устройством для определения кодов.
В предпочтительном варианте осуществления этап (b) дополнительно содержит этапы, на которых (i) перемножают определенные коды для одного или более спутников в спутниковой системе позиционирования вместе для формирования объединенного кода; (ii) умножают поднабор набора сигналов в окне на объединенный код; и (iii) анализируют выходной сигнал этапа (ii), чтобы определить, имеется ли соответствие между объединенным кодом и набором сигналов в окне. Объединение кодов для формирования объединенного кода означает, что количество отдельных операций умножения может быть минимизировано.
В альтернативном варианте осуществления этап (b) содержит этапы, на которых (i) умножают поднабор набора сигналов в окне на один из определенных кодов; (ii) повторяют этап (i) для каждого из определенных кодов; (iii) перемножают выходной сигнал каждой итерации этапа (i) вместе; и (iv) анализируют выходной сигнал этапа (iii), чтобы определить, имеется ли соответствие между каким-либо из определенных кодов и набором сигналов в окне.
В любом варианте осуществления окно может охватывать поднабор сигналов, продолжительность которых равна целому N, кратному продолжительности кода, где N=1, 2, 3, ..., N предпочтительно больше 1, так как это улучшает чувствительность способа, поскольку поиск кода выполняется в большей части набора дискретных сигналов.
Предпочтительно этап анализа содержит этапы, на которых фильтруют выходной сигнал с помощью фильтра низкой частоты; определяют амплитуду, мощность или среднеквадратичное значение (RMS) выходного сигнала фильтра низкой частоты; сравнивают определенную амплитуду, мощность или RMS с пороговым значением; и определяют, что имеется соответствие между одним из определенных кодов и набором сигналов в окне, если определенная амплитуда, мощность или RMS превышают пороговое значение.
В некоторых вариантах осуществления пороговое значение является фиксированным значением. Однако в предпочтительных вариантах осуществления пороговое значение корректируется на основе уровня шума в наборе сигналов.
Предпочтительно, если на этапе анализа определено, это нет соответствия между определенными кодами и набором сигналов в окне, этап (b) дополнительно содержит этап, на котором смещают окна по набору сигналов на первую величину и повторяют этапы умножения для поднабора сигналов в смещенном окне. Предпочтительно первая величина соответствует времени, потраченному спутником для передачи до одного бита кода.
Если на этапе анализа определено, что имеется соответствие между определенными кодами и набором сигналов в окне, и этап (b) требует, чтобы были найдены два или более соответствий, то этап (b) дополнительно содержит этап, на котором смещают окно по набору сигналов на вторую величину и повторяют этапы умножения для поднабора сигналов в смещенном окне. Предпочтительно вторая величина соответствует или в значительной степени соответствует времени, потраченному спутником для передачи кода.
В некоторых вариантах осуществления этап (c) содержит этап, на котором передают набор сигналов, который вероятно будет содержать сигналы от спутников в спутниковой системе позиционирования, удаленному терминалу, причем обработка набора сигналов для вычисления местоположения устройства выполняется удаленным терминалом. В качестве альтернативы, обработка на этапе (c) может быть выполнена устройством.
Предпочтительно этап (a) содержит этап, на котором активируют приемник спутниковой системы позиционирования в устройстве на предварительно определенный период времени и дискретизируют принятые сигналы для формирования набора сигналов. Предпочтительно активирование приемника спутниковой системы позиционирования в устройстве содержит схему активирования в приемнике для преобразования принятого высокочастотного аналогового сигнала в цифровой сигнал промежуточной частоты.
В некоторых вариантах осуществления этап (a) содержит этап, на котором управляют приемником спутниковой системы позиционирования в устройстве, чтобы собрать набор сигналов, по истечении предварительно определенного временного интервала с момента сбора последнего набора сигналов. В качестве альтернативы этап (a) может содержать этап, на котором оценивают расстояние, пройденное устройством с того момента, когда был собран самое последний набор сигналов, и управляют приемником спутниковой системы позиционирования, чтобы собрать дополнительный набор сигналов, когда предполагаемое пройденное расстояние превышает пороговое значение.
Предпочтительно местоположение устройства должно быть определено в соответствии с этапами (b), (c) и (d), когда произошло событие. В некоторых вариантах осуществления событие может включать в себя падение пользователя устройства, активацию пользователем кнопки вызова помощи на устройстве, инициирование предупредительного сигнала устройством, и/или когда устройство иным образом не способно определить свое местоположение.
В соответствии со вторым аспектом изобретения обеспечен компьютерный программный продукт, имеющий воплощенный в нем машиночитаемый код, машиночитаемый код выполнен таким образом, что при его исполнении подходящим процессором или компьютером процессор или компьютер выполнены с возможностью выполнять описанный выше способ.
В соответствии с третьим аспектом изобретения обеспечено устройство, которое содержит приемник спутниковой системы позиционирования; и процессор, выполненный с возможностью (a) управлять приемником спутниковой системы позиционирования для сбора нескольких наборов сигналов; и когда должно быть определено местоположение устройства: процессор дополнительно выполнен с возможностью (b) обрабатывать набор сигналов, чтобы определить, будет ли набор вероятно содержать сигналы от спутников в спутниковой системе позиционирования; и (c) если на этапе (b) определено, что набор сигналов будет вероятно содержать сигналы от спутников в спутниковой системе позиционирования, активировать обработку набор сигналов для вычисления местоположения устройства; (d) если на этапе (b) определено, что набор сигналов маловероятно будет содержать сигналы от спутников в спутниковой системе позиционирования, повторять этапы (b), (c) и (d) с другим набором сигналов. Поскольку обработка набора сигналов, чтобы определить, будет ли набор вероятно содержать сигналы от спутников, посредством процессора в соответствии с изобретением требует намного меньшего объема обработки и мощности, чем полная обработка сигналов для определения местоположения устройства, для устройства возможно собрать и оценить требуемую полезность набора дискретных сигналов, максимизируя время работы батареи устройства.
Предпочтительно другой набор сигналов представляет собой набор сигналов, собранных перед набором сигналов, обработанных процессором на этапе (b). Это приводит к тому, что процессор выполняет "обратное отслеживание" по собранным наборам дискретных сигналов, пока не будет найден набор, который может использоваться для определения местоположения устройства.
Предпочтительно процессор выполнен с возможностью выполнять поиск в наборе сигналов кодов, используемых одним или более спутниками в спутниковой системе позиционирования. Каждый код обычно уникален для конкретного спутника в спутниковой системе позиционирования. В случае, когда приемник спутниковой системы позиционирования предназначен для приема сигналов GPS, код представляет собой код PRN.
Предпочтительно процессор выполнен с возможностью определять, что коды, связанные с одним или более спутниками в спутниковой системе позиционирования, ожидаемые в поле видимости устройства в то время, когда было собран набор сигналов. Это означает, что вычислительная мощность и время не потрачены впустую при поиске кодов, связанных со спутниками, которые маловероятно будут находиться в поле видимости устройства.
Процессор может определять коды посредством получения кодов из таблицы поиска, сохраненной в запоминающем устройстве, что уменьшает обработку, требуемую устройством для определения кодов.
В предпочтительном варианте осуществления процессор выполнен с возможностью обрабатывать набор сигналов, чтобы определить, будет ли набор вероятно содержать сигналы от спутников в спутниковой системе позиционирования, посредством (i) перемножения определенных кодов для одного или более спутников в спутниковой системе позиционирования вместе для формирования объединенного кода; (ii) умножения поднабора набора сигналов в окне на объединенный код; и (iii) анализа выходного сигнала этапа (ii), чтобы определить, имеется ли соответствие между объединенным кодом и набором сигналов в окне. Объединение кодов для формирования объединенного кода означает, что количество отдельных операций умножения может быть минимизировано.
В альтернативном варианте осуществления процессор выполнен с возможностью обрабатывать набор сигналов, чтобы определить, будет ли набор вероятно содержать сигналы от спутников в спутниковой системе позиционирования, посредством (i) умножения поднабора набора сигналов в окне на один из определенных кодов; (ii) повторения этапа (i) для каждого из определенных кодов; (iii) перемножения выходного сигнала каждой итерации этапа (i) вместе; и (iv) анализа выходного сигнала этапа (iii), чтобы определить, имеется ли соответствие между каким-либо из определенных кодов и набором сигналов в окне.
В любом варианте осуществления окно может охватывать поднабор сигналов, продолжительность которых равна целому N, кратному продолжительности кода, где N=1, 2, 3, ..., N предпочтительно больше 1, так как это улучшает чувствительность способа, поскольку поиск кода выполняется в большей части набора дискретных сигналов.
Предпочтительно процессор выполнен с возможностью анализировать выходной сигнал этапа (iii) посредством фильтрации выходного сигнала с помощью фильтра низкой частоты; определения амплитуды, мощности или среднеквадратичного значения (RMS) выходного сигнала фильтра низкой частоты; сравнения определенной амплитуды, мощности или RMS с пороговым значением; и определения, что имеется соответствие между одним из определенных кодов и набором сигналов в окне, если определенная амплитуда, мощность или RMS превышают пороговое значение.
В некоторых вариантах осуществления пороговое значение является фиксированным значением. Однако в предпочтительных вариантах осуществления процессор выполнен с возможностью корректировать пороговое значение на основе уровня шума в наборе сигналов.
Предпочтительно, если процессор на основе анализа выходного сигнала этапа (iii) определяет, что нет соответствия между определенными кодами и набором сигналов в окне, процессор выполнен с возможностью смещать окно по набору сигналов на первую величину и повторять умножение для поднабора сигналов в смещенном окне. Предпочтительно первая величина соответствует времени, потраченному спутником для передачи до одного бита кода.
Если процессор на основе анализа определяет, что имеется соответствие между определенными кодами и набором сигналов в окне, и требуется найти два или более соответствий, то процессор дополнительно выполнен с возможностью смещать окно по набору сигналов на вторую величину и повторять умножение для поднабора сигналов в смещенном окне. Предпочтительно вторая величина соответствует или в значительной степени соответствует времени, потраченному спутником для передачи кода.
Предпочтительно процессор может быть выполненным с возможностью активировать приемник спутниковой системы позиционирования в устройстве на предварительно определенный период времени, чтобы приемник сформировал набор сигналов. Предпочтительно приемник спутниковой системы позиционирования содержит схему для преобразования принятого высокочастотного аналогового сигнала в цифровой сигнал промежуточной частоты, и процессор выполнен с возможностью активировать упомянутую схему.
В некоторых вариантах осуществления процессор выполнен с возможностью активировать приемник спутниковой системы позиционирования, чтобы собрать набор сигналов, по истечении предварительно определенного временного интервала с момента сбора последнего набора сигналов. В качестве альтернативы, процессор может быть выполнен с возможностью оценивать расстояние, пройденное устройством с того момента, когда был собран самый последний набор сигналов, и активировать приемник спутниковой системы позиционирования, чтобы собрать дополнительный набор сигналов, когда предполагаемое пройденное расстояние превышает пороговое значение.
Предпочтительно местоположение устройства должно быть определено, когда произошло событие. В некоторых вариантах осуществления событие может включать в себя падение пользователя устройства, активацию пользователем кнопки вызова помощи на устройстве, инициирование предупредительного сигнала устройством, и/или когда устройство иным образом не способно определить свое местоположение.
В некоторых вариантах осуществления процессор выполнен с возможностью обрабатывать набор сигналов для вычисления местоположения устройства. В альтернативных вариантах осуществления устройство содержит передатчик или схему приемопередатчика, и если процессором определено, что набор сигналов вероятно будет содержать сигналы от спутников в спутниковой системе позиционирования, процессор выполнен с возможностью передавать набор сигналов удаленному терминалу через передатчик или схему приемопередатчика, чтобы удаленный терминал мог обработать набор сигналов для определения местоположения устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания изобретения, и чтобы более ясно продемонстрировать, как оно может быть приведено в исполнение, теперь только в качестве примера будет сделана ссылка на сопроводительные чертежи, на которых:
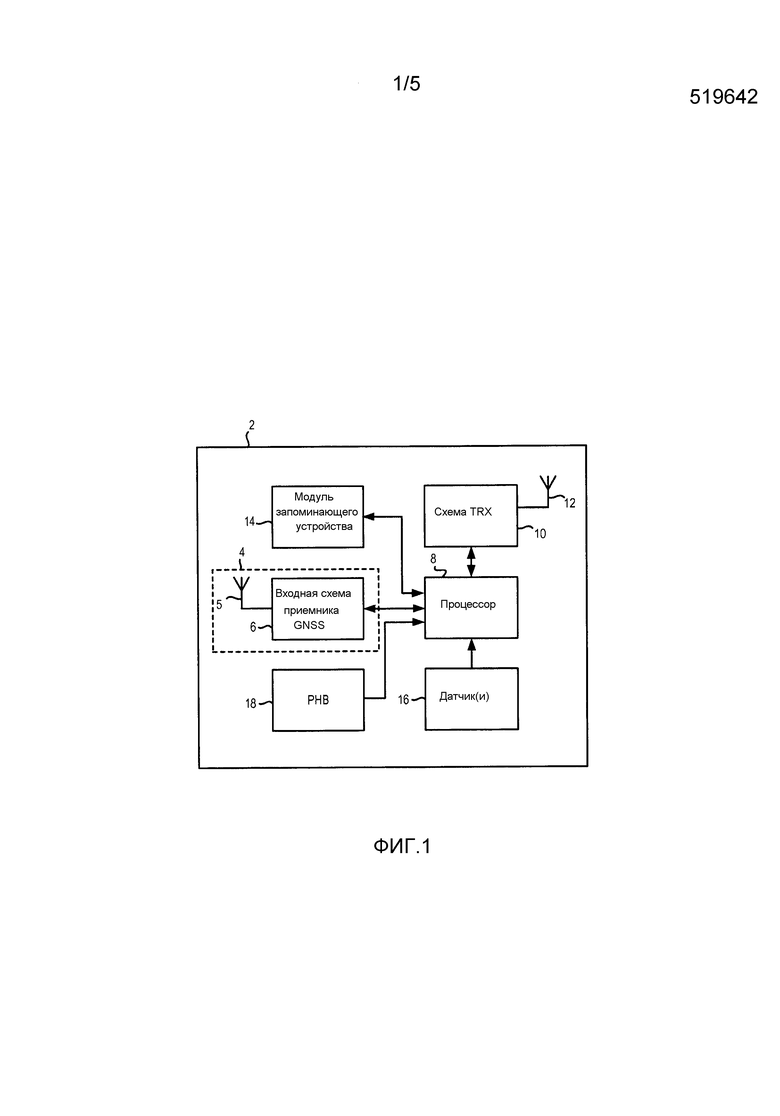
Фиг. 1 - блок-схема устройства в соответствии с вариантом осуществления изобретения;
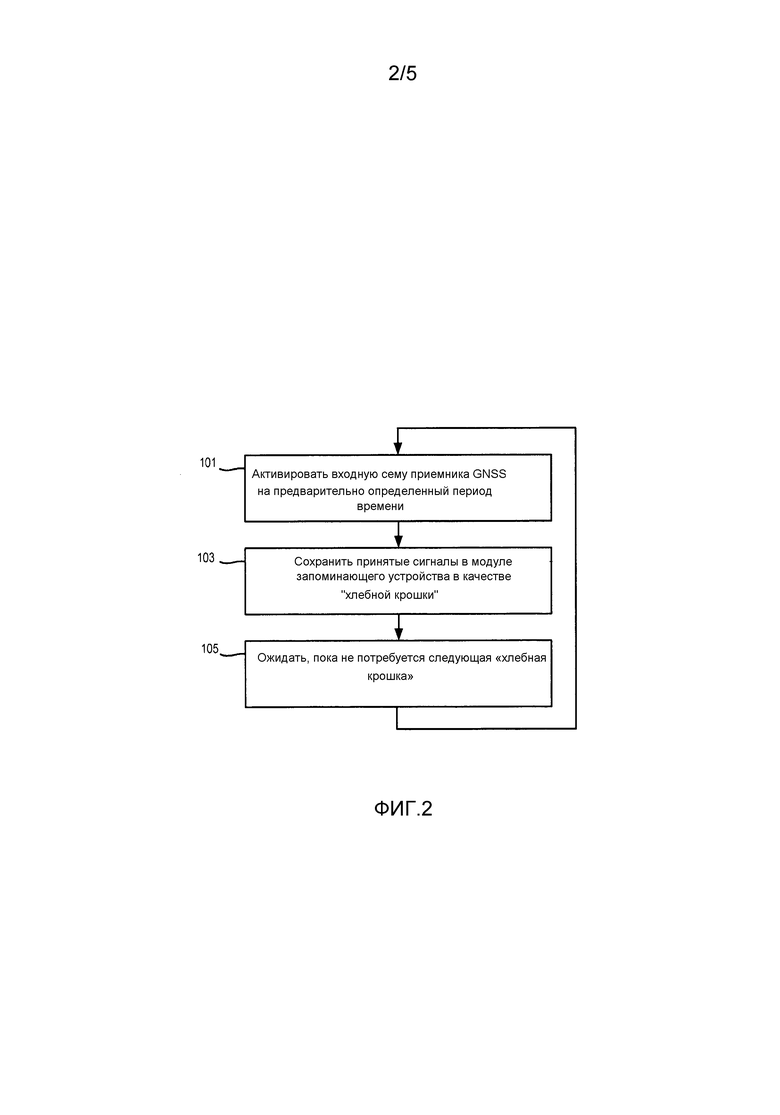
Фиг. 2 - блок-схема последовательности операций, иллюстрирующая способ сбора данных «хлебной крошки» в соответствии с изобретением;
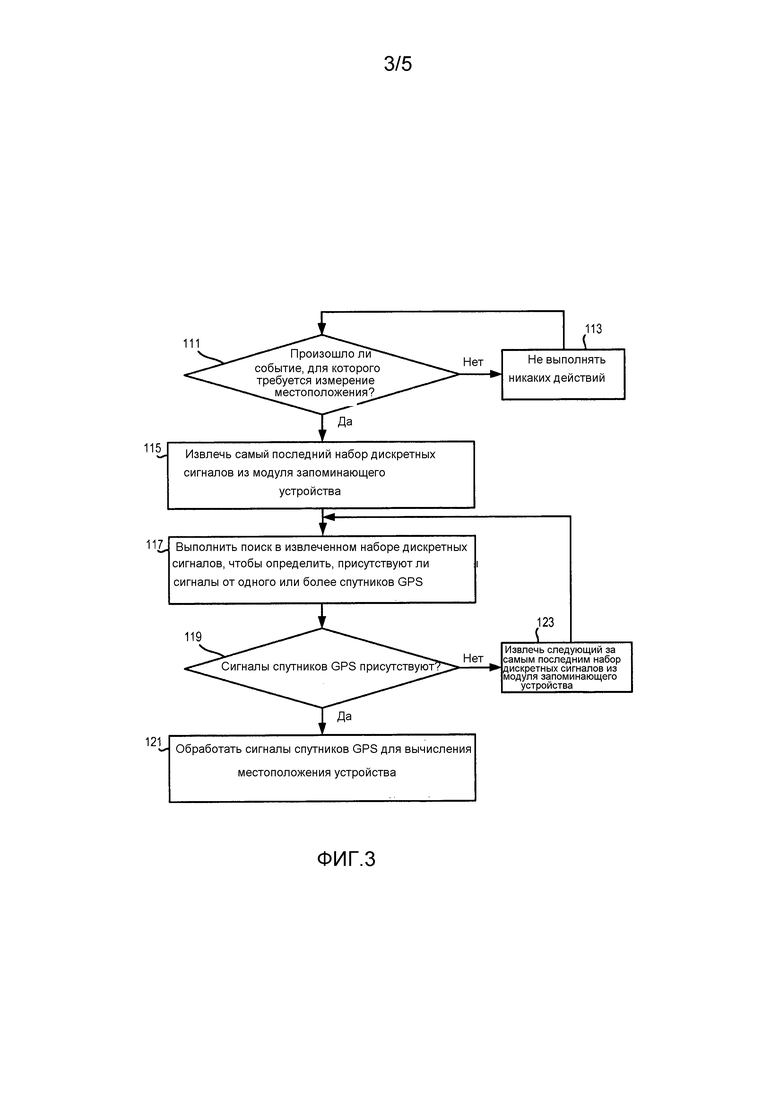
Фиг. 3 - блок-схема последовательности операций, иллюстрирующая способ обработки данных «хлебной крошки» в соответствии с изобретением;
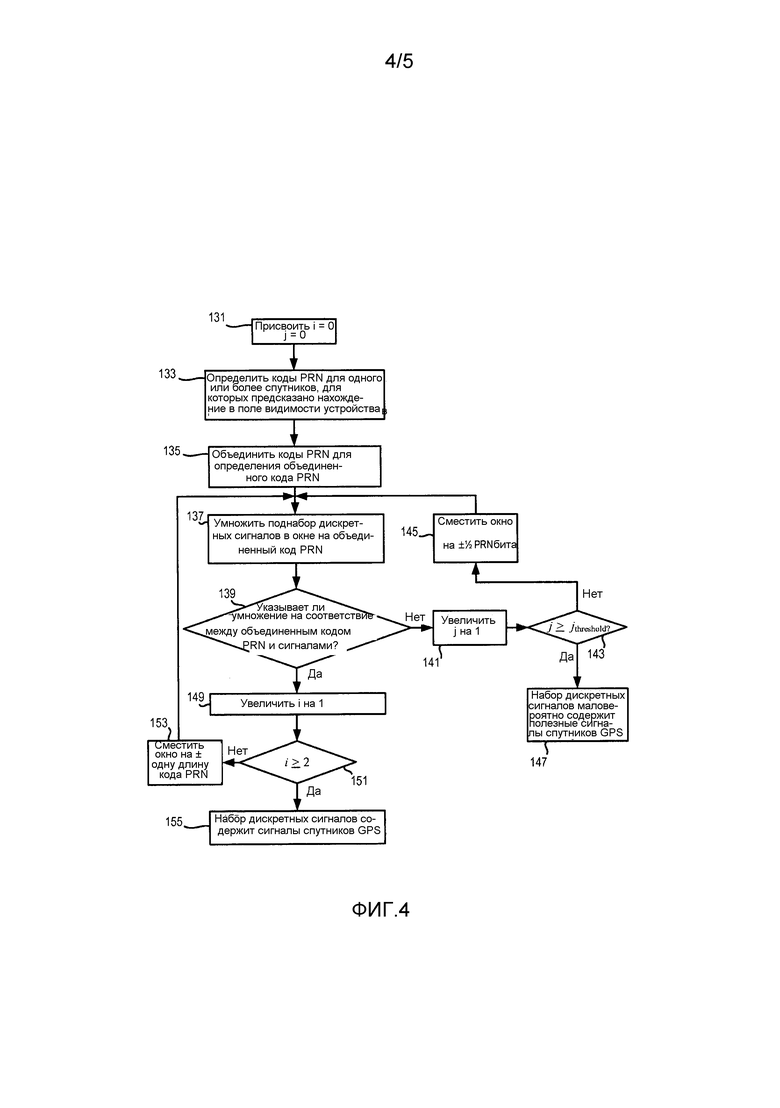
Фиг. 4 - блок-схема последовательности операций, показывающая иллюстративный способ реализации этапа 117 на фиг. 3, в соответствии с вариантом осуществления изобретения; и
Фиг. 5 - блок-схема, иллюстрирующая обработку, выполняемую в соответствии со способом на фиг. 4.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Хотя изобретение будет описано ниже со ссылкой на определения местоположения устройства с использованием системы глобального позиционирования (GPS), будет понятно, что изобретение применимо к глобальной навигационной спутниковой системе (GNSS) или спутниковой системе позиционирования (SPS) любого другого типа, такой как спутниковые системы позиционирования GLONASS или Galileo.
Иллюстративное устройство MPERS в соответствии с вариантом осуществления изобретения показано на фиг. 1. Однако очевидно, что изобретение может быть реализовано в переносном или мобильном электронном устройстве любого типа, которое включает в себя функциональность спутниковой системы позиционирования, таком как мобильный телефон, смартфон, детектор падения или навигационный прибор для транспортного средства.
Устройство 2 MPERS обычно имеет вид устройства, которое пользователь может носить на себе или переносить. Устройство 2 может быть обеспечено в виде кулона со шнурком для размещения вокруг шеи пользователя, но в качестве альтернативы устройство 2 может быть выполнено с возможностью его ношения на другой части тела пользователя, например, на запястье, талии, туловище или груди, и может содержать подходящую конфигурацию для присоединения пользовательского устройства 4 к этой части тела (например, пояс или ремень).
Устройство 2 содержит программно определяемый приемник GPS, который в предпочтительных вариантах осуществления содержит аппаратный входной каскад 4 приемника, включающий в себя антенну 5, которая может принимать сигналы, передаваемые спутниками GPS, и входную схему 6 приемника GNSS, соединенную с процессором 8, который исполняет программное обеспечение, чтобы произвести обработку принятых сигналов. Входная схема 6 приемника может содержать схему входного радиокаскада GNSS с высокой интеграцией, например, один или более полосовых фильтров, фильтров с низким уровнем шума (lna), микшеров и аналого-цифровых преобразователей для обеспечения низкой промежуточной частоты (IF) и приспособленный интерфейс для программных реализаций GPS или обработки сигнала основной полосы GNSS.
Входная схема 6 приемника в основном преобразовывает высокочастотный сигнал GPS, принятый от спутников GPS, в низкочастотный промежуточный сигнал, сохраняя модулированную структуру сигнала. Это делается для того, чтобы привести частоту к применимым диапазонам, в которых сигнал может обрабатываться.
Процессор 8 принимает исходный сигнал GNSS промежуточной частоты от входной схемы 6 приемника и в требуемое время (например, когда необходимо определить местоположение устройства 2) выполняет обработку сигналов, чтобы определить, присутствуют ли сигналы от спутников GPS. В некоторых вариантах осуществления процессор 8 также способен определять местоположение и/или скорость устройства 2 на основе обнаруженных сигналов спутника GPS.
В дополнение к обработке принятых спутниковых сигналов процессор 8 управляет общей работой устройства 2.
В альтернативных вариантах осуществления устройство 2 может содержать специализированный аппаратный модуль приемника GPS, содержащий аппаратные средства, соответствующие входному каскаду 4 приемника, и соответствующий процессор для обработки принятых сигналов для определения местоположения устройства 2.
В проиллюстрированном варианте осуществления устройство 2 дополнительно содержит схему 10 приемопередатчика, которая присоединена к процессору 8, и соответствующую антенну 12 для беспроводной связи с сетью мобильной связи. Схема 10 приемопередатчика может использоваться для установления голосовых вызовов и/или сеансов передачи данных между устройством 2 и телефонным центром и/или службами экстренной помощи.
Устройство 2 дополнительно содержит модуль 14 запоминающего устройства, соединенный с процессором 8, который используется для хранения исходных сигналов GNSS промежуточной частоты, принятых модулем 4 приемника GNSS, как описано более подробно ниже.
В проиллюстрированном варианте осуществления устройство 2 дополнительно содержит один или более датчиков 16, которые могут использоваться для контроля за пользователем устройства 2 или устройством 2 непосредственно, чтобы определить, когда происходит событие, для которого пользователю может потребоваться помощь. Подходящие датчики 16 включают в себя датчики для измерения перемещения и/или ориентации устройства 2, такие как акселерометр, магнитометр или гироскоп, которые выдают соответствующий сигнал процессору 8, а также датчики для измерения состояния здоровья пользователя, такие как монитор частоты сердечных сокращений, монитор кровяного давления и т.д. Хотя не показано на фиг. 1, один или более датчиков 16 могут быть присоединены к процессору низкой мощности, связанному с процессором 8, для обработки и анализа сигналов от датчика (датчиков) 16.
В этом проиллюстрированном варианте осуществления устройство 2 MPERS дополнительно содержит персональную кнопку 18 вызова помощи (PHB), которую пользователь может использовать для быстрого вызова помощи. Однако очевидно, что кнопка 18 PHB не обязательно должна быть в виде кнопки, а может являться, например, вариантом выбора в графическом пользовательском интерфейсе устройства 2.
Хотя на фиг. 1 не показано, в некоторых вариантах осуществления устройство 2 MPERS может быть выполнено с возможностью принимать сигналы от спутниковых систем позиционирования других типов (таких как GLONASS или Galileo) и/или может содержать приемники для приема сигналов других типов (таких как сигналы Wi-Fi) от других источников, которые могут быть обработаны для определения местоположения устройства 2.
Как описано в разделе "Предшествующий уровень техники", чтобы помочь смягчить "проблему мертвой точки" (то есть, точки, в которой нет доступного сигнала GPS, когда модуль приемника GPS активирован и должен определить местоположение устройства), устройства могут использовать алгоритм обратного отслеживания, в котором сохраняется по меньшей мере самое последнее измерение местоположения, и это измерение используется в качестве оценки местоположения устройства, если текущее измерение местоположения не доступно. Однако в обычном модуле приемника GPS или даже в модуле приемника GPS, работающем в соответствии с алгоритмом обратного отслеживания, мощность, потребляемая при необходимости вычислить местоположение устройства, когда каждый набор сигналов собирается в соответствии с алгоритмом обратного отслеживания, означает, что батареи в доступных на настоящий момент устройствах могут проработать только несколько недель, тогда как вследствие особенностей типичных пользователей таких устройств желательно, чтобы батареи в устройствах MPERS проработали в течение нескольких месяцев. Поэтому изобретение обеспечивает улучшения существующей методики обратного отслеживания, которые в значительной степени уменьшают количество времени и энергии, требуемое для сбора данные для каждой «хлебной крошки», без увеличения времени или энергии, требуемых в других частях устройства 2.
Блок-схема последовательности операций на фиг. 2 иллюстрирует способ сбора данных «хлебных крошек» в соответствии с изобретением.
На этапе 101, когда должны быть собраны «хлебные крошки», процессор 8 активирует входную схему 6 приемника GNSS на предварительно определенный период времени и дискретизирует принятые сигналы. Как только предварительно определенный период времени истек, входная схема 6 приемника GNSS отключается. Набор сигналов, принятых и дискретизированных в предварительно определенном периоде времени, здесь называется "хлебными крошками".
Активирование входной схемы 6 приемника GNSS может содержать подачу питания на схему 6, чтобы схема 6 принимала и дискретизировала данные исходного сигнала, и эти данные дискретного сигнала подаются на процессор 8 и/или в модуль 14 запоминающего устройства. В качестве альтернативы, входная схема 6 приемника может поддерживаться в режиме низкой мощности, когда она не преобразовывает или снабжает данными сигнала процессор 8 или модуль 14 запоминающего устройства, когда «хлебные крошки» не требуются, и она может быть переключена в режим «включено», когда должны быть собраны »хлебные крошки».
Очевидно, что «хлебные крошки» должны иметь достаточную длину, чтобы позволить процессору, исполняющему подходящее программное обеспечение для обработки GNSS, или другой внутренней схеме приемника GNSS или GPS обработать «хлебные крошки» и определить местоположение устройства 2 в то время, когда «хлебная крошка» была получена (при условии, что сигналы спутника GPS присутствуют в «хлебной крошке»). Подходящая длина для «хлебной крошки» находится в диапазоне от 100 мс до 200 мс, хотя очевидно, что могут быть собраны более длинные или более короткие «хлебные крошки». Безусловно, очевидно, что чем дольше входная схема 6 приемника GNSS является активной (и чем длиннее «хлебная крошка»), тем больше потребляется мощности и памяти, таким образом, длина «хлебной крошки» является компромиссом между потребностью минимизировать потребление энергии и потребностью получить достаточно длинный набор дискретных сигналов, в которых будут вероятно найдены сигналы спутника GPS.
Принятые сигналы могут быть дискретизированы с частотой, которая находится в диапазоне от 2 МГц до 8 МГц, и каждая выборка имеет длину от 1 до 4 битов (хотя очевидно, что могут использоваться другие частоты и/или длины битов). Таким образом, при длине «хлебной крошки», находящейся в диапазоне от 100 мс до 200 мс, каждая «хлебная крошка» по размеру составит от 25 кБ до 800 кБ. Может потребоваться сохранить несколько десятков или сотен «Хлебных крошек» в модуле 14 запоминающего устройства, таким образом, модуль 14 запоминающего устройства должен быть способен хранить по меньшей мере от 2500 кБ до 80000 кБ данных.
Дискретные сигналы сохраняются в модуле 14 запоминающего устройства (этап 103). На данном этапе никакая дополнительная обработка над дискретными сигналами не выполняется (то есть, дискретные сигналы не обрабатываются для определения, присутствуют ли сигналы спутника GPS в дискретных сигналах, или для определения местоположения устройства 2). Это особенно выгодно для устройства MPERS, поскольку измерение местоположения требуется только тогда, когда происходит событие, и поэтому мощность, израсходованная при сборе и сохранении данных «хлебной крошки», минимизирована. В иллюстративных вариантах осуществления для аппаратного входного каскада 4 приемника, который использует 100 мА в активном состоянии и собирает приблизительно сто «хлебных крошек» с длительностью 100 мс в день, средний расход энергии аппаратного входного каскада 4 приемника составит около 12 мкА. Это выгодно отличается от приемника GNSS, работающего обычно (то есть, без использования алгоритма «хлебные крошки»), который будет использовать мощность в диапазоне мА, и от приемника, который не принимает сигналы от спутника и работает в режиме поиска (постоянно используя около 30 мА).
После этапа 103 процессор 8 ожидает, пока следующая «хлебная крошка» не должна быть собрана (этап 105), и когда следующая «хлебная крошка» должна быть собран, способ возвращается на этап 101. Время между сбором последовательных «хлебных крошек» будет определено алгоритмом «хлебные крошки», исполняемым процессором 8. В некоторых случаях «хлебные крошки» могут быть собраны после фиксированного временного интервала, но в других, предпочтительных случаях алгоритм «хлебные крошки» может быть динамическим, и интервал между «хлебными крошками» может устанавливаться на основе величины перемещения устройства с момента сбора предыдущей «хлебной крошки» (например, новая «хлебная крошка» собирается только тогда, когда датчик 16 перемещения в устройстве 2 указывает, что устройство 2 переместилось на более чем предварительно определенное расстояние от того места, где была собрана предыдущая «хлебная крошка»).
Способ на фиг. 2 повторяется, пока устройство 2 не активировано или, например, пока устройство 2 не находится дома, где дополнительная информация местонахождения не нужна в любой момент. Это может произойти, когда пользователь активирует кнопку 18 PHB, когда устройство 2 определяет, что пользователь возможно упал, или когда другие подсистемы сигнализации активируют устройство 2.
Способ обработки данных «хлебной крошки» в соответствии с изобретением показан на фигуре 3. На этапе 111 определяется, произошло ли событие, при котором требуется измерение местоположения устройства 2. Если не произошло, то никакие действия не выполняются (этап 113).
Если измерение местоположения устройства 2 требуется посредством сохраненных «хлебных крошек», то самая последняя «хлебная крошка» (то есть, набор дискретных сигналов, сохраненных самыми последними в модуле 14 запоминающего устройства), извлекается из модуля 14 запоминающего устройства процессором 8 (этап 115).
В этот момент устройство 2 может передать данные «хлебной крошки» в удаленное местонахождение, где они могут быть обработаны с использованием сложных алгоритмов обработки, используя все доступные вспомогательные данные (например, самая последняя версия альманаха GPS и другие данные), чтобы определить местоположение устройства 2. Однако возможно, что данные «хлебной крошки» не будут содержать необходимые сигналы от спутников GPS, таким образом, передача этой «хлебной крошки» в удаленное местонахождение фактически потратит впустую мощность в устройстве 2. Поэтому процессор 8 выполняет поиск в извлеченном наборе дискретных сигналов, чтобы определить, содержат ли дискретные сигналы сигналы от одного или более спутников GPS.
Предпочтительно процессор 8 выполняет поиск только в части набора дискретных сигналов (например, отсчеты, покрывающие от 1 мс до 10 мс времени, что соответствует 1-10 кодов псевдослучайных последовательностей (PRN), переданных спутниками GPS), поскольку после короткого периода поиска, если сигналы от спутников GPS не найдены, вероятность того, что в остальной части дискретных сигналов в наборе будут иметься пригодные данные для определения местоположения устройства 2, становится слишком низкой. Часть набора дискретных сигналов, в которой процессором 8 выполняется поиск, может находиться в начале «хлебной крошки» или в некотором местоположении после начала «хлебной крошки». Поиск только в части набора дискретных сигналов означает, что мощность, использованная при оценке полезности «хлебной крошки», минимизирована.
Если определено, что в извлеченном наборе дискретных сигналов имеются сигналы от одного или более (предпочтительно от двух или более) спутников GPS (этап 119), набор дискретных сигналов обрабатывается, чтобы вычислить местоположение устройства 2 в точке, в которой набор дискретных сигналов был собран (этап 121).
В предпочтительных вариантах осуществления этап 121 выполняется удаленно от устройства 2 MPERS. В этом случае после определения на этапе 119, что в наборе дискретных сигналов имеются сигналы от одного или более спутников GPS, устройство 2 MPERS передает набор дискретных данных в удаленное местонахождение (такое как базовый блок для устройства 2 MPERS в доме пользователя, телефонный центр, связанный с устройством 2 MPERS или службы экстренной помощи) через схему 10 приемопередатчика и антенну 12. Процессор, исполняющий подходящее программное обеспечение, или специализированная внутренняя схема приемника GNSS в этом местонахождении выполняет необходимую обработку данных «хлебной крошки», чтобы вычислить местоположение устройства 2. Удаленная обработка данных «хлебной крошки», поскольку это позволяет использовать более мощные методики и вспомогательные данные для обработки набора дискретных сигналов, чтобы вычислить местоположение устройства 2.
В качестве альтернативы, этап 121 может быть выполнен устройством 2 MPERS непосредственно. В этом случае процессор 8 может обработать набор дискретных сигналов, чтобы вычислить местоположение устройства 2 MPERS (или, в качестве альтернативы, устройство 2 может быть снабжено подходящей внутренней схемой). Затем вычисленное местоположение может быть передана от устройства 2 MPERS требуемому адресату через схему 10 приемопередатчика сети мобильной связи и антенну 12.
Вернемся к этапу 119, на котором, если в части извлеченного набора дискретных сигналов, в которых был выполнен поиск процессором 8, сигналы спутника GPS не найдены, способ переходит на этап 123, на котором набор дискретных сигналов отбрасывается и следующие за самыми последними дискретными сигналами извлекаются из модуля 14 запоминающего устройства. Затем способ возвращается на этап 117, и в новом извлеченном наборе дискретных сигналов выполняется поиск, чтобы определить, присутствуют ли сигналы от одного или более спутников.
Таким образом, этап 123 реализует процедура "обратного отслеживания", которая используется, чтобы найти самый последний набор дискретных сигналов, которое содержит пригодные сигналы спутника GPS.
Поиск, выполняемый процессором 8 на этапе 117, позволяет быстро и эффективно оценить данные «хлебных крошек», чтобы определить, стоит ли передавать или дополнительно обрабатывать эти данные для вычисления местоположения устройства 2. Альтернативой для процессора 8 или модуля 4 GPS является попытка полного вычисления местоположения устройства 2 на основе самого последнего набора дискретных сигналов (что может потребовать вспомогательные данные, такие как данные альманаха GPS, отправленные из телефонного центра, для подлежащего выполнению вычисления и использует значительно больше мощности), или для устройства 2 MPERS - передача данных для нескольких «хлебных крошек» в удаленное местонахождение, что требует, чтобы устройство 2 MPERS имело хороший канал передачи данных с сетью мобильной связи, и, таким образом, также использует много мощности.
В дополнительном варианте осуществления изобретения до выполнения этапа 115 и извлечения самого последнего набора дискретных сигналов из модуля 14 запоминающего устройства после того, как произошло событие, устройство 2 может попытаться получить измерение текущего местоположения с использованием входной схемы 6 приемника GNSS и программного обеспечения, исполняющегося на процессоре 8. Если невозможно определить местоположение устройства 2 с использованием приемника GNSS (например, если устройство 2 находится в закрытом помещении или в "городском каньоне", и нет спутников в поле видимости устройства 2), то устройство 2 может попытаться определить свое местоположение с использованием альтернативной методики измерений, такой как использование приемопередатчика Wi-Fi для идентификации ближайших сетей Wi-Fi или посредством использовании триангуляции сот мобильной связи. Устройство 2 будет выполнять способ, показанный на фиг. 3, и обрабатывать данные «хлебной крошки» в соответствии с изобретением, только если устройство 2 не способно определить местоположение с использованием GPS или этих других методик. Этот вариант осуществления имеет преимущество в том, что устройство 2 может попытаться получить измерение текущего местоположения перед использованием данных «хлебной крошки».
Иллюстративный способ исполнения этапа 117 описан ниже со ссылкой на фиг. 4 и 5. Фиг. 4 является блок-схемой последовательности операций способа, используемого для поиска дискретных сигналов для сигналов от спутников GPS, и фиг. 5 является блок-схемой, иллюстрирующей этапы обработки. На первом этапе на фиг. 4, на этапе 131, параметр i (который используется для представления количества соответствий/выравниваний, найденных в дискретных сигналах, с сигналами от спутников GPS) инициализируется значением 0, и параметр j (представляющий количество операций умножения и сдвига, выполняемых над данными «хлебной крошки») также инициализируется значением 0.
Спутники GPS передают свои сигналы с использованием широкополосного кодирования (кода PRN), и это означает, что сигнал подвергается расширению в шумоподобный сигнал, и он не обнаружим посредством нормального измерения мощности. Таким образом, требуется альтернативный подход, чтобы обнаружить, присутствуют ли сигналы спутника GPS в наборе дискретных сигналов простым и требующим малой мощности способом. В частности, выполняется последовательный поиск дискретных сигналов для спутников GPS, для которых предсказано нахождение в поле видимости устройства 2.
Как известно, сигналы от каждого спутника GPS расширяются с использованием кодирования псевдослучайной последовательностью (PRN), уникального для каждого спутника, который повторяется каждую 1 мс, коды PRN для каждого из спутников GPS являются ортогональными друг другу. Поэтому на втором этапе на фиг. 4 (этап 133) определяются коды PRN для одного или более спутников GPS, для которых предсказано нахождение в поле видимости устройства 2.
Предпочтительно устройство 2 имеет таблицу, перечисляющую местонахождения, времена и орбиты спутников GPS (и соответствующие коды PRM), сохраненную в модуле 14 запоминающего устройства, на основе которой процессор 8 может определить спутники, которые наиболее вероятно находятся в поле видимости устройства 2, в любое заданное время с использованием грубой оценки местоположения устройства 2. Таблица может соответствовать данным альманаха GPS или быть полученной из них. Грубая оценка местоположения устройства 2 может соответствовать самому последнему вычисленному измерению местоположения (полученному с использованием GPS, Wi-Fi, триангуляции сот или иным образом) или местоположению дома пользователя (если известно). Каждый спутник является видимым в большой области, оценка местоположения устройства 2 не должна быть особенно точной (например, приемлемыми являются ближайшие 100 км).
Затем, как только определены коды PRN, они предпочтительно перемножаются вместе для формирования единого (объединенного) кода PRN (этап 135). Это также можно видеть на фиг. 5, где коды 50 PRN для спутников GPS, для которых предсказано нахождение в поле видимости, объединяются посредством умножителя 52. Обычно до шести спутников могут ожидаться в поле видимости устройства 2, и поэтому в предпочтительных вариантах осуществления от трех до шести кодов PRN перемножаются вместе на этапе 135 для формирования единого (объединенного) кода PRN. Определение количества кодов для перемножения вместе является компромиссом между временем обработки, требуемым для обнаружения спутниковых сигналов на следующих этапах, и чувствительностью к этим сигналам. Чем больше спутников рассматривается (то есть, чем больше кодов PRN перемножаются вместе), тем дольше время интеграции, требуемое, чтобы процесс был достаточно чувствительным для обнаружения спутниковых сигналов. Было обнаружено, что перемножение трех кодов PRN вместе обеспечивает хороший баланс времени обработки и чувствительности. Когда должны быть перемножены вместе коды PRN меньше чем для шести спутников, коды PRN для поднабора этих шести спутников могут быть выбраны случайным образом, или они могут быть выбраны на основе спутников, ожидаемые выше всех в небе в то время, когда была собрана «хлебная крошка» (поскольку эти спутники наименее вероятно будут закрыты зданиями или другими препятствиями).
Очевидно, что этапы 133 и 135 могут быть выполнены в режиме офлайн (то есть, они не обязательно должны выполняться, когда событие произошло там, где устройство 2 должно определить свое местоположение), и объединенный код PRN сохраняется в модуле 14 запоминающего устройства для последующего использования.
После того, как объединенный код PRN был определен, производится поиск в наборе дискретных сигналов, формирующих «хлебную крошку», с использованием объединенного кода PRN, чтобы определить, присутствуют ли сигналы от одного или более спутников, коды PRN которых формируют объединенный код PRN. В конкретных вариантах осуществления этот поиск выполняется посредством умножения каждого бита объединенного кода PRN на каждый отсчет в наборе дискретных сигналов (этап 137). Это умножение подобно выполняемому при сужения спектра сигнала (хотя не совсем, поскольку "сужение спектра" выполняется с использованием объединенного кода PRN).
В частности, каждый бит объединенного кода PRN умножается на каждый отсчет в поднаборе набора дискретных сигналов во временном окне с продолжительностью T, где T равно целому числу N, кратному продолжительности объединенного кода PRN. T обычно равно 1, то есть продолжительность временного окна времени является такой же, как продолжительность объединенного кода PRN, хотя более высокие значения T улучшают чувствительность алгоритма, поскольку поиск объединенного кода PRN выполняется в большей части «хлебной крошки» в одной операции умножения. Первоначально окно может быть "расположено" так, чтобы первый отсчет в окне являлся первым отсчетом в «хлебной крошке». Однако, когда доступна информация из предыдущего поиска в наборе дискретных сигналов, возможно предсказать местоположение, в котором коды PRN будут вероятно выровнены, поэтому очевидно, что начальное местоположение окна в наборе дискретных сигналов во время последующего умножения может быть установлена на основе этой информации. Умножение также проиллюстрировано на фиг. 5, как набор дискретных сигналов 54 подается на умножитель 56 вместе с объединенным кодом PRN, выданным умножителем 52.
Очевидно, чтобы набор дискретных сигналов 54 было умножено на объединенный код PRN, частота дискретизации набора дискретных сигналов должна соответствовать частоте объединенного кода PRN. Это достигается на этапе 101 посредством входной схемы 6 приемника, выполняющей преобразование с понижением частоты первоначального сигнала несущей до низкой промежуточной частоты и затем дискретизацию сигнала промежуточной частоты на частоте, которая соответствует скорости передачи кода PRN.
После умножения на этапе 137 результат умножения оценивается, чтобы определить, имеется ли соответствие между объединенным кодом PRN и дискретными сигналами в окне (этап 139). Результат умножения представляет синусоидальный сигнал низкой промежуточной частоты сигнала со сжатым спектром, который включает в себя сигналы несущей от каждого из спутников, коды PRN которых использовались для формирования объединенного кода PRN. Если значительная часть объединенного кода PRN соответствует или выравнивается по времени с набором дискретных сигналов в окне, то идеально остается одна (почти нулевая) частота с большей амплитудой (представляющий сигнал от спутника (спутников)). Амплитуда сигнала увеличивается, если спутниковые сигналы будут присутствовать в дискретных сигналах.
Из-за эффекта Доплера частота этого синусоидального сигнала может быть смещена на 10 кГц в устройствах 2, которые перемещаются, и на 5 кГц для устройств 2, которые являются стационарными. Максимальная амплитуда возникнет, когда окно умножения на дискретных сигналах будет совершенно выровнено с кодом PRN в сигнале. Однако на практике только части дискретного сигнала будут выровнены с разными частями объединенного кода PRN. Таким образом, взятое измерение мощности или амплитуды (после низкочастотной фильтрации при 5 или 10 кГц) покажет существенное увеличение, если большие и/или множественные части выровнены.
Таким образом, чтобы определить степень соответствия, результат этапа умножения подвергается низкочастотной фильтрации (как показано посредством блока 58 фильтра низкой частоты на фиг. 5) для извлечения этого низкочастотного сигнала, и вычисляется одно или более значений из амплитуды, мощности или среднеквадратичного значения (RMS) низкочастотного сигнала (блок 60 на фиг. 5). Результат измерения амплитуды, мощности или RMS сравнивается с пороговым значением 62 в блоке 64 сравнения. Если измерение амплитуды, мощности или RMS превышают пороговое значение 62, то найдено соответствие или выравнивание между одним или более кодами PRN, составляющими объединенный код PRN, и дискретными сигналами.
В некоторых вариантах осуществления пороговое значение 62 является фиксированным значением. Пороговое значение, которое будет использоваться заданным устройством 2, будет определено по меньшей мере частично посредством характеристик аппаратных средств в устройстве 2 (например, коэффициентом усиления входной схемы 6). Пороговое значение также может зависеть от уровня шума, присутствующего в дискретных сигналах. Таким образом, в альтернативных вариантах осуществления пороговое значение 62 может корректироваться во время использования устройства 2 на основе на уровня шума в принятых сигналах. Это делается потому, что для сигналов, принятых от спутников GPS, уровень "сигнала" (то есть, интенсивность полезной части принятого сигнала) является чрезвычайно небольшим по сравнению с уровнем шума (то есть, интенсивностью всего остального в принятом сигнале), и это означает, что увеличение шума влияет на чувствительность приемника 4. Чтобы обеспечить насколько возможно чувствительный приемник, для различения обычного шума и шума с включенными спутниковыми сигналами, пороговое значение 62 должно быть адаптировано к уровням шума, присутствующим в дискретных сигналах. Средняя амплитуда уровня шума может быть определена и использована в качестве базовой/нулевой точки для порогового значения.
Выходной сигнал блока 64 сравнения передается блоку 66 принятия решения. Если измерение амплитуды, мощности или RMS не превышают пороговое значение 62, то соответствие для объединенного кода PRN и текущего набора дискретных сигналов в окне не найдено.
На этапе 141 параметр j (представление количества операций умножения и сдвига, выполненных над данными «хлебной крошки») увеличивается на 1, и значение j сравнивается с пороговым значением jthreshold (этап 143). Если значение j меньше порогового значения, то способ переходит на этап 145, на котором блок 66 принятия решения заставляет выполнить сдвиг окна на дискретных сигналах по данным 54 «хлебной крошки» на предварительно определенную величину. После того, как окно сдвинуто, способ возвращается на этап 137, на котором набор дискретных сигналов в смещенном окне умножается на объединенный код PRN.
Если значение j равно или больше порогового значения, jthreshold, то предварительно определенное количество операций умножения и сдвига (то есть, циклов этапов 137, 139 и 145) было завершено без нахождения соответствие между объединенным кодом PRN и дискретными сигналами, формирующими «хлебную крошку», и может быть определено, что текущая «хлебная крошка» маловероятно содержит полезные сигналы спутника GPS (этап 147). В этом случае, возвращаясь к блок-схеме последовательности операций на фиг. 3, выходной сигнал определения на этапе 119 является отрицательным, и следующая новая «хлебная крошка» извлекается из модуля 14 запоминающего устройства (этап 123). Как описано выше относительно этапа 117, предпочтительно выполняется поиск только в 1-10 мс данных «хлебной крошки», когда пороговое значение jthreshold определено соответствующим образом. Такое ограничение поиска данных «хлебной крошки» желательно, поскольку после короткого периода поиска (например, 1-10 миллисекунд данных «хлебной крошки»), если сигналы от спутников GPS не найдены, вероятность того, что в остальной части набора дискретных сигналов могут иметься пригодные данные для определения местоположения устройства 2, становится слишком низкой.
Возвратимся к этапу 145, на котором в предпочтительных вариантах осуществления окно смещается по данным «хлебной крошки» на половину одного бита кода PRN. Поскольку код PRN представляет собой 1023-битовую последовательность, которая передается полностью каждую 1 мс, смещение окна на одну половину бита кода PRN означает смещение окна по дискретным сигналам в «хлебной крошке» приблизительно на 488 нс. Однако очевидно, что окно может быть смещено на альтернативную величину, например, на одну четверть бита кода PRN или на целый бит кода PRN. В качестве альтернативы, окно может быть смещено вперед на целое число дискретных сигналов, и целое число определяется в соответствии с частотой дискретизации, используемой для формирования дискретных сигналов, и величиной времени, на которое окно должно быть смещено.
Если измерение амплитуды, мощности или RMS превышает пороговое значение 62, то вероятно, что сигналы от одного или более спутников GPS, коды PRN которых формируют объединенный код PRN, были найдены в данных «хлебной крошки». Поэтому на этапе 149 параметр i увеличивается на 1 (параметр i указывает количество соответствий, найденных между дискретными сигналами и объединенным кодом PRN), и на этапе 151 определяется, было ли найдено достаточное количество соответствий в «хлебной крошке», чтобы процессор 8 определил, что «хлебная крошка» содержит пригодные или полезные сигналы спутника GPS.
В проиллюстрированном варианте осуществления необходимое количество соответствий равно двум, поэтому если i меньше двух, способ переходит на этап 153, на котором окно на дискретных сигналах смещается по данным «хлебной крошки» приблизительно на одну целую длину кода PRN (например, 1 мс). Затем способ возвращается на этап 137, на котором набор дискретных сигналов в смещенном окне перемножается с объединенным кодом PRN, чтобы попытаться найти дополнительные соответствия между объединенным кодом PRN и дискретными сигналами.
Если или когда найдено два или более соответствий с данными «хлебной крошки» (то есть, i равно или больше двух на этапе 151), то может быть определено, что текущая «хлебная крошка» вероятно содержит пригодные или полезные сигналы спутника GPS (этап 155), и этап 121 на фиг. 3 может быть выполнен над «хлебной крошкой».
Однако очевидно, что в альтернативных вариантах осуществления может быть достаточно идентифицировать единственное соответствие между объединенным кодом PRN и дискретными сигналами, и в этом случае этапы 149, 151 и 153 могут быть опущены. Также очевидно, что может быть желательно найти больше двух соответствий с дискретным сигналом, прежде чем прийти к заключению, что «хлебная крошка» содержит пригодные или полезные сигналы спутника GPS.
Как описано выше, на этапе 135 несколько кодов PRN объединяются, чтобы произвести объединенный код PRN. Это делается, чтобы сократить количество дискретных сигналов в «хлебной крошке», в которых должен выполняться поиск, поскольку это увеличивает шанс, что часть одного из кодов PRN будет соответствовать части дискретного сигнала в окне умножения.
В альтернативном варианте осуществления может быть опущен этап 135. В этом варианте осуществления каждый из кодов PRN, идентифицированных на этапе 133, индивидуально умножается на дискретные сигналы в окне умножения (подобно этапу 137), и результаты каждого умножения самостоятельно перемножаются вместе. Затем результат обрабатывается, как показано на фигуре 5 (то есть, подвергается низкочастотной фильтрации перед измерением амплитуды, мощности или RMS). Хотя этот вариант осуществления устраняет необходимость этапа 135, отдельное умножение дискретных сигналов в окне на каждый из кодов PRN увеличивает общий требуемый объем обработки, и тем самым приводит к немного более высокому потреблению энергии, чем в проиллюстрированном варианте осуществления.
Либо в проиллюстрированном варианте осуществления, либо в альтернативном варианте осуществления, описанном в предыдущем абзаце, предпочтительно используются только простые функции во время каждого из этапов способа, чтобы минимизировать требуемую обработку и тем самым потребляемую мощность. Например, на этапе умножения каждый бит объединенного кода PRN умножается на каждый 1-4-битовый отсчет в дискретном сигнале. Кроме того, или в качестве альтернативы, блок 58 низкочастотной фильтрации может представлять собой фильтр низкой частоты второго порядка, и/или функция измерения RMS (блок 60) может быть ограничена.
Поскольку возможность присутствия возмущения сигнала в принятом сигнале при синхронизации с кодом PRN от спутника GPS является очень низкой, было обнаружено, что описанный выше простой алгоритм является достаточно надежным при обнаружении сигналов спутника GPS. Алгоритм обеспечивает очень быстрый метод с низкой мощностью и низкой сложностью для выбора пригодных данных GPS из большого набора «хлебных крошек», и когда данные «хлебной крошки» должны быть переданы в удаленное местонахождение для полной обработки местоположения, алгоритм уменьшает объем данных, который должен быть передан устройством 2, до небольшого количества «хлебных крошек», что дополнительно улучшает потребление энергии устройства 2.
Таким образом, обеспечена улучшенная методика обратного отслеживания, которая максимизирует время работы батареи и уменьшает частоту, с которой пользователь должен перезаряжать или заменять батареи в своем устройстве, что максимизирует шанс, что устройство может обеспечить точное или разумно недавнее измерение местонахождения или местоположения, когда требуется.
Хотя изобретение было подробно проиллюстрировано и описано на чертежах и в упомянутом описании, такую иллюстрацию и такое описание следует считать иллюстративными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
Изменения раскрытых вариантов осуществления могут быть понятны специалистам в области техники и реализованы ими при осуществлении заявленного изобретения на основании изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, а использование единственного числа не исключает множества. Единственный процессор или другой блок могут выполнить функции нескольких элементов, изложенных в формуле изобретения. Сам факт того, что некоторые меры изложены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может использоваться для достижения преимущества. Компьютерная программа может быть сохранена/распространена на подходящем носителе, таком как оптический запоминающий носитель или твердотельный носитель, обеспеченный вместе с другими аппаратными средствами или как часть аппаратных средств, но также может быть распространена в других формах, например, через Интернет или другие проводные или беспроводные системы связи. Любые знаки для ссылок в формуле изобретения не должны рассматриваться как ограничение объема.

Изобретение относится к определению местоположения устройства с использованием спутниковой системы позиционирования. Техническим результатом является повышение точности измерения местоположения при максимальном времени работы батареи. Заявленный способ определения местоположения устройства содержит этапы, на которых (a) управляют приемником спутниковой системы позиционирования в устройстве, чтобы собрать несколько наборов сигналов; и когда должно быть определено местоположение устройства, (b) обрабатывают набор сигналов, чтобы определить, будет ли набор вероятно содержать сигналы от спутников в спутниковой системе позиционирования; и (c) если на этапе (b) определено, что набор сигналов вероятно будет содержать сигналы от спутников в спутниковой системе позиционирования, обрабатывают набор сигналов для вычисления местоположения устройства; (d) если на этапе (b) определено, что набор сигналов маловероятно будет содержать сигналы от спутников в спутниковой системе позиционирования, повторяют этапы (b), (c) и (d) с другим набором сигналов. 3 н. и 12 з.п. ф-лы, 5 ил.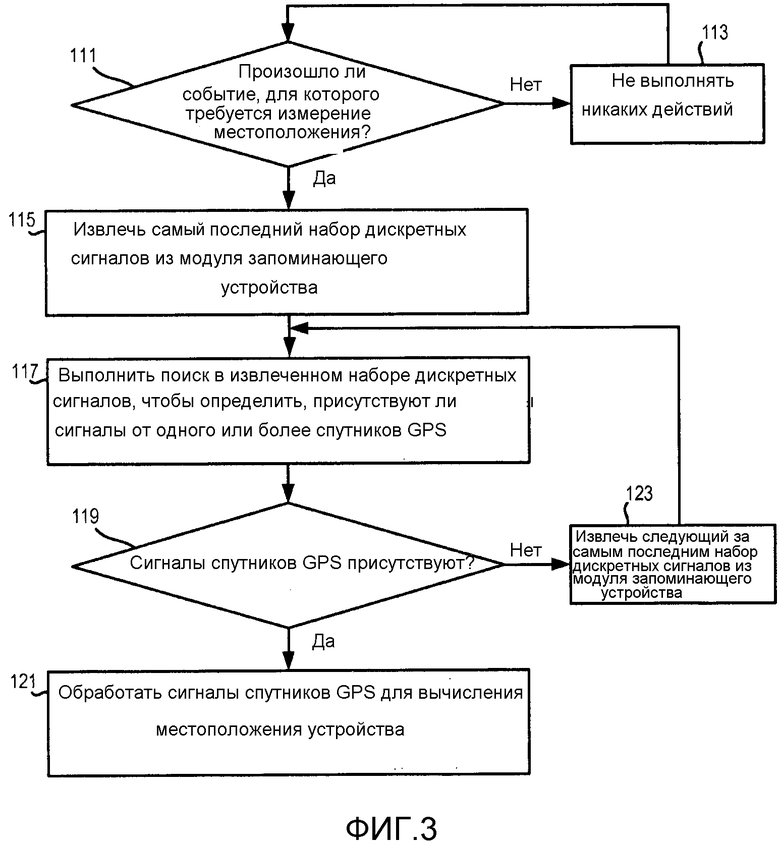
1. Способ определения местоположения устройства с использованием спутниковой системы позиционирования, содержащий этапы, на которых:
(a) управляют приемником спутниковой системы позиционирования в устройстве для сбора множества наборов сигналов; и
когда должно быть определено местоположение устройства:
(b) обрабатывают набор сигналов, чтобы определить, имеется ли вероятность, что набор содержит сигналы от спутников в спутниковой системе позиционирования, посредством поиска только в части набора сигналов, чтобы определить, содержит ли набор сигналы от спутников; и
(c) если на этапе (b) определено, что имеется вероятность, что набор сигналов содержит сигналы от спутников в спутниковой системе позиционирования, обрабатывают набор сигналов для вычисления местоположения устройства;
(d) если на этапе (b) определено, что нет вероятности, что набор сигналов содержит сигналы от спутников в спутниковой системе позиционирования, повторяют этапы (b), (c) и (d) с другим набором сигналов.
2. Способ по п. 1, в котором упомянутый другой набор сигналов является набором сигналов, собранных перед набором сигналов, обработанных на этапе (b).
3. Способ по п. 1 или 2, в котором этап (b) содержит поиск в наборе сигналов кодов, используемых одним или более спутниками в спутниковой системе позиционирования.
4. Способ по п. 3, в котором этап (b) содержит этап, на котором:
определяют коды, связанные с одним или более спутниками в спутниковой системе позиционирования, ожидаемыми в поле видимости устройства в то время, когда собирался набор сигналов.
5. Способ по п. 4, в котором этап (b) дополнительно содержит этапы, на которых:
(i) перемножают определенные коды для одного или более спутников в спутниковой системе позиционирования вместе для формирования объединенного кода;
(ii) умножают поднабор набора сигналов в окне на объединенный код; и
(iii) анализируют выходной сигнал этапа (ii), чтобы определить, имеется ли соответствие между объединенным кодом и набором сигналов в окне.
6. Способ по п. 4, в котором этап (b) содержит этапы, на которых:
(i) умножают поднабор набора сигналов в окне на один из определенных кодов;
(ii) повторяют этап (i) для каждого из определенных кодов;
(iii) перемножают выходной сигнал каждой итерации этапа (i) вместе; и
(iv) анализируют выходной сигнал этапа (iii), чтобы определить, имеется ли соответствие между каким-либо из определенных кодов и набором сигналов в окне.
7. Способ по п. 5, в котором окно охватывает поднабор сигналов, продолжительность которых равна целому N, кратному продолжительности кода, где N=1, 2, 3, ...
8. Способ по п. 5, в котором этап анализа содержит этапы, на которых:
фильтруют выходной сигнал с помощью фильтра низкой частоты;
определяют амплитуду, мощность или среднеквадратичное значение (RMS) выходного сигнала фильтра низкой частоты;
сравнивают определенную амплитуду, мощность или RMS с пороговым значением; и
определяют, что имеется соответствие между одним из определенных кодов и набором сигналов в окне, если определенная амплитуда, мощность или RMS превышают пороговое значение.
9. Способ по п. 8, в котором пороговое значение корректируется на основе уровня шума в наборе сигналов.
10. Способ по п. 5, в котором, если на этапе анализа определено, что нет соответствия между определенными кодами и набором сигналов в окне, этап (b) дополнительно содержит этапы, на которых:
смещают окно по набору сигналов на первую величину и повторяют этапы умножения для поднабора сигналов в смещенном окне.
11. Способ по п. 10, в котором первая величина соответствует времени, потраченному спутником для передачи до одного бита кода.
12. Способ по любому из пп. 5-11, в котором если на этапе анализа определено, что имеется соответствие между определенными кодами и набором сигналов в окне и этап (b) требует, чтобы были найдены два или более соответствий, то этап (b) дополнительно содержит этап, на котором:
смещают окно по набору сигналов на вторую величину и повторяют этапы умножения для поднабора сигналов в смещенном окне.
13. Способ по п. 12, в котором вторая величина соответствует или в значительной степени соответствует времени, потраченному спутником для передачи кода.
14. Машиночитаемый носитель, содержащий машиночитаемый код, при этом машиночитаемый код выполнен таким образом, что при его исполнении процессором или компьютером процессор или компьютер выполнены с возможностью выполнять способ по любому из пп. 1-13.
15. Устройство для определения местоположения, содержащее:
приемник спутниковой системы позиционирования;
процессор, выполненный с возможностью:
(a) управлять приемником спутниковой системы позиционирования для сбора множества наборов сигналов; и
когда должно быть определено местоположение устройства:
(b) обрабатывать набор сигналов, чтобы определять, имеется ли вероятность, что набор содержит сигналы от спутников в спутниковой системе позиционирования, посредством поиска только в части набора сигналов, чтобы определить, содержит ли набор сигналы от спутников; и
(c) если на этапе (b) определено, что имеется вероятность, что набор сигналов содержит сигналы от спутников в спутниковой системе позиционирования, активировать обработку набора сигналов для вычисления местоположения устройства;
(d) если на этапе (b) определено, что нет вероятности, что набор сигналов содержит сигналы от спутников в спутниковой системе позиционирования, повторять этапы (b), (c) и (d) с другим набором сигналов.
| US 6728637 B2, 27.04.2004 | |||
| WO 2010072540 A1, 01.07.2010 | |||
| 0 |
|
SU163316A1 | |
| US 2010328151 A1, 30.12.2010 | |||
| US 6336076 B1, 01.01.2002 | |||
| СИСТЕМА, СПОСОБ И ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ В СИСТЕМЕ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2256935C2 |
| СИСТЕМА И СПОСОБ ПОЛУЧЕНИЯ ДАННЫХ ДЛЯ ПОМОЩИ В ОБНАРУЖЕНИИ СИГНАЛА | 2004 |
|
RU2365933C2 |

