Изобретение относится к области измерительной техники и может быть использовано для контроля профиля трехмерных объектов, а также их визуализации, в том числе в технологических процессах контроля и формообразования объектов сложной формы (лопатки турбин и т.п.). Кроме того, оно может использоваться в различных приложениях компьютерной трехмерной графики, а также при решении задач распознавания образов, в том числе в системах охраны.
Известны устройства, реализующие принцип структурированной подсветки, которые используются для контроля профиля трехмерных объектов, а также в трехмерной компьютерной анимации и некоторых других приложениях для регистрации формы поверхности.
Известно устройство для бесконтактного контроля профиля трехмерных объектов методом структурированной подсветки, содержащее источник структурированной подсветки в виде множества параллельных полос, выполненный в виде источника света и транспаранта, содержащего изображение параллельных полос, блок регистрации изображения структурированной подсветки, искаженной поверхностью контролируемого объекта, и вычислитель, выполненный с возможностью определения координат поверхности контролируемого объекта по формуле ΔZ(x;y)=ΔY(x,y)/tgα, где ΔZ(x;y) - значение высоты профиля поверхности контролируемого объекта в точке с координатами X, Y, пересекаемой какой-либо полосой; ΔY(x,y) - величина искривления полосы в этой точке; α - угол между направлением излучения от источника излучения и оптической осью объектива (см., например, WO 99/58930 А1, опубл. 18.11.1999). Недостатками известного устройства являются высокая погрешность контроля и ограниченные функциональные возможности. Высокая погрешность измерения обусловлена тем, что при направлении на поверхность контролируемого объекта структурированной подсветки в виде множества параллельных полос возникает изображение полос, в котором искажения, вызванные глубокими впадинами, высокими выпуклостями и, тем более, сквозными отверстиями, невозможно идентифицировать из-за разрывов в изображении линий. Поскольку высота профиля определяется по величине искажений линий, отсутствие в изображении собственно линий из-за наличия отверстий не позволяет распознать отверстия на контролируемой поверхности.
Наиболее близким из известных по своей технической сущности является выбранное в качестве прототипа устройство (WO 02/075243 А1, опубл. 26.09.2002), реализующее способ бесконтактного контроля профиля поверхности трехмерного объекта методом структурированной подсветки, содержащее источник структурированной подсветки в виде множества параллельных полос, блок регистрации изображения структурированной подсветки, искаженной поверхностью контролируемого объекта, и вычислитель, выполненный с возможностью определения координат поверхности контролируемого объекта. При этом источник структурированной подсветки выполнен с возможностью многократного формирования структурированной подсветки в виде апериодической совокупности полос, а блок регистрации изображения искаженной рельефом поверхности осуществляет накопление суммарного изображения. Причем вычислитель определяет координаты поверхности контролируемого объекта по расстоянию вдоль полосы и номеру полосы, формируемому логическим суммированием двоичных чисел, кодирующих положение полос в каждой из реализаций апериодической совокупности полос так, что единица соответствует наличию полосы, а нуль - отсутствию полосы.
Недостатками известного устройства являются недостаточная точность определения координат и неоднозначное определение профиля отдельных фрагментов поверхности при наличии разрывов в изображении линий из-за искажений, вызванных глубокими впадинами, высокими выпуклостями и, тем более, сквозными отверстиями. Кроме того, не обеспечивается достаточная скорость контроля, так как требуется неоднократное повторение регистрации изображения, тогда как во многих технологиях, в том числе и в системах охраны, время контроля играет важную роль, так как при решении задач распознавания время регистрации изображения объекта контроля и его распознавания часто бывает ограничено.
Технический результат, достигаемый при реализации предлагаемого изобретения, заключается в повышении точности измерения профиля поверхности трехмерных объектов при одновременном повышении скорости определения неоднородностей профиля за счет последовательно-параллельной обработки изображений.
Указанный технический результат достигается за счет того, что в устройстве для бесконтактного контроля профиля поверхности трехмерных объектов, содержащем источник подсветки участков поверхности объекта в виде полос, блок регистрации изображения полос, искаженных рельефом поверхности контролируемого объекта, и блок определения координат рельефа поверхности контролируемого объекта, отличающееся тем, что дополнительно включает N-канальный цифровой электронный блок обработки изображения полос искаженных рельефом поверхности контролируемого объекта, причем число N определяется из соотношения:
N=entire(Ymax/ΔYmax),
где Ymax - максимальный размер регистрируемого изображения;
ΔYmax - требуемая точность определения координат рельефа поверхности контролируемого объекта;
а каждый из N каналов включает модулятор с двумя входами, генератор опорных сигналов, запоминающий элемент и интерполятор с двумя входами, при этом первый вход модулятора соединен с выходом соответствующего генератора опорных сигналов, каждый из N генераторов опорных сигналов выполнен с возможностью формирования сигнала, соответствующего изображению (точнее, кодирующего изображение) полос (без искажения рельефом поверхности контролируемого объекта) с периодом, определяемым порядковым номером канала, тем большим, чем больше номер канала, второй вход модулятора соединен с выходом блока регистрации изображения полос, искаженных рельефом поверхности контролируемого объекта, выход модулятора соединен с входом соответствующего запоминающего элемента, первый вход интерполятора (вычислителя), выполненного с возможностью выявления (идентификации) и интерполирования разрывов полос в изображении полос, искаженных рельефом поверхности контролируемого объекта, соединен с выходом соответствующего запоминающего устройства, второй вход интерполятора в каждом канале, кроме первого, соединен с выходом интерполятора из канала с номером на единицу меньше, а выход N-го интерполятора соединен с входом блока определения координат рельефа поверхности контролируемого объекта.
Предлагаемое изобретение иллюстрируется следующими чертежами.
На Фиг.1 изображена функциональная схема устройства.
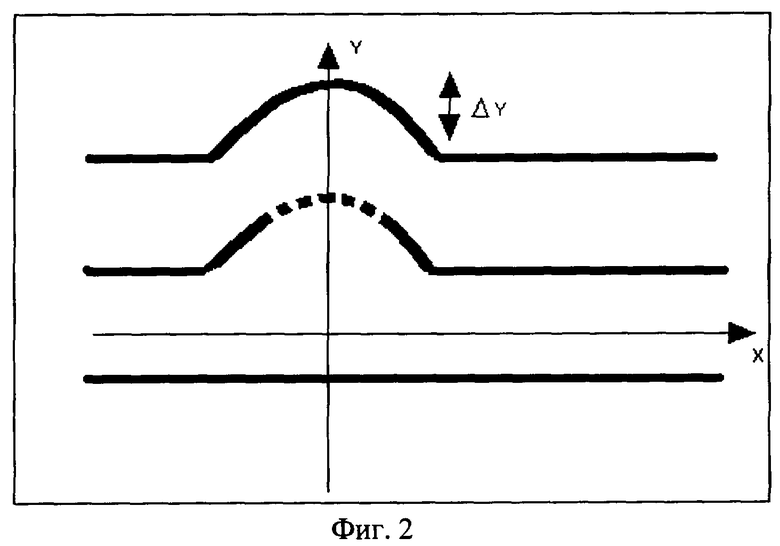
На Фиг.2 показана одна из возможных реализаций структурированной подсветки.
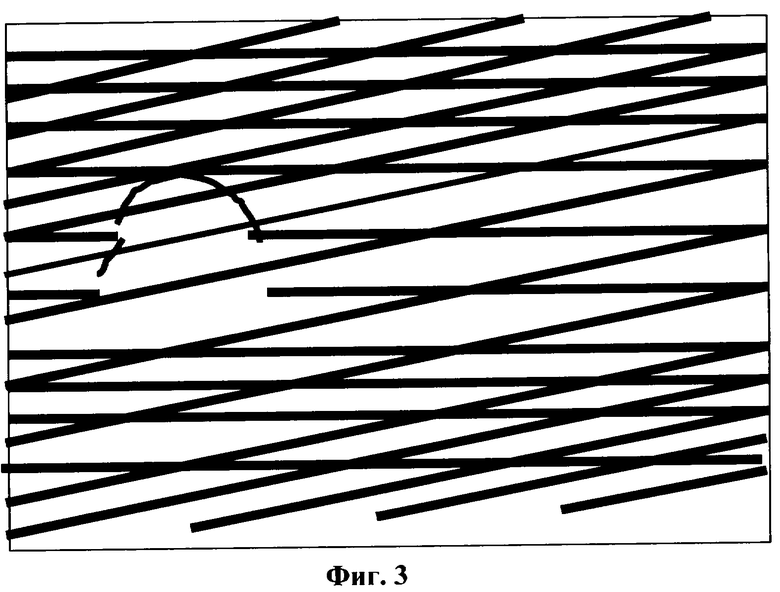
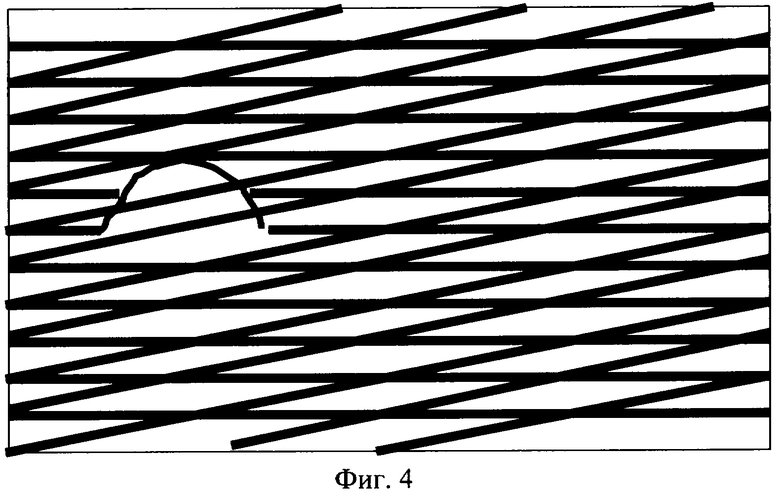
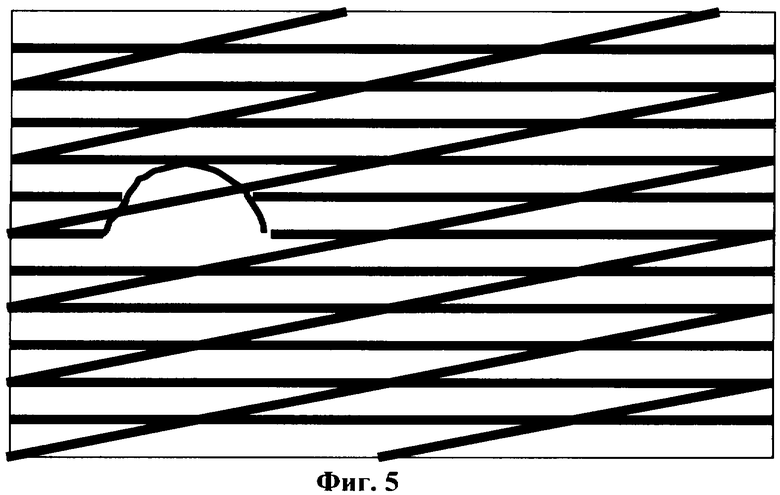
На Фиг.3-5 условно показаны изображения (пространственные сигналы), снимаемые с выходов модуляторов.
Предлагаемое устройство для бесконтактного контроля и распознания трехмерных объектов методом структурированной подсветки (фиг.1) содержит источник структурированной подсветки (ИСП) 1, формирующей изображение структурированной подсветки в виде множества полос на поверхности объекта контроля, который может быть выполнен, например, в виде источника света и транспаранта, содержащего изображение параллельных полос (но полосы могут быть, например, в виде концентричных колец), блок регистрации изображения полос, искаженных рельефом поверхности объекта, который может быть выполнен в виде телевизионной камеры (TV) 2, регистрирующей изображения поверхности контролируемого объекта и структурированной подсветки на нем, N-канальный цифровой электронный блок обработки изображения полос, искаженных рельефом, содержащий модуляторы 31-3N, генераторы опорных сигналов 41-4N, запоминающие устройства 51-5N, электронные цифровые блоки интерполяции 61-6N и блок определения координат рельефа поверхности контролируемого объекта.
В каждом из каналов цифрового электронного блока обработки изображения искаженных полос установлены модулятор 3k(k=1...N) с двумя входами, генератор опорных сигналов 4k, запоминающее устройство 5k и интерполятор 6k с двумя входами. Каждый из генераторов опорных сигналов 4k формирует сигнал, с помощью которого кодируется изображение полос с периодом, определяемым порядковым номером канала, тем большим, чем больше номер канала. Первый вход каждого модулятора 3k соединен с выходом соответствующего генератора 4k опорных сигналов, второй вход каждого модулятора 3k соединен с выходом телевизионной камеры (TV) 2. Выход каждого модулятора 3k соединен с входом соответствующего запоминающего устройства 5k. Первый вход каждого интерполятора 6k связан с выходом соответствующего запоминающего устройства, второй вход каждого интерполятора 6k кроме первого интерполятора 61, связан с выходом другого интерполятора, входящего в канал с порядковым номером на единицу меньше, т.е. 6k-1. Выход 6N интерполятора соединен с входом блока определения координат рельефа поверхности контролируемого объекта
На Фиг.2 условно показано изображение искаженной структурированной подсветки на поверхности контролируемого объекта в виде выступа вдоль оси Y. Пунктиром показан результат интерполяции.
На Фиг.3-5 условно показаны изображения (пространственные сигналы), снимаемые с выходов модуляторов, соответственно, 31-33, полученные в результате кодирования изображения полос, поступающего с выхода блока регистрации изображения полос, с помощью поступающих с выходов соответствующих генераторов опорных сигналов 41-43 в виде пространственных одномерных решеток, период которых тем больше, чем больше порядковый номер канала.
Устройство работает следующим образом. Источник структурированной подсветки (ИСП) 1 проецирует на контролируемый объект изображение структурированной подсветки в виде множества параллельных полос, ориентированных относительно системы координат XYZ заранее определенным образом. Изображение контролируемой поверхности объекта вместе с изображением искаженной неровностями поверхности объекта структурированной подсветкой воспринимается блоком регистрации изображения, который может быть выполнен в виде цифровой телекамеры 2. Сигнал, содержащий информацию о зарегистрированном изображении с телекамеры 2 поступает на входы модуляторов 31-3N. На вторые входы модуляторов 31-3N поступают сигналы от соответствующих генераторов опорных сигналов 41-4N, продуцирующие сигналы в виде пространственных одномерных решеток для обеспечения кодирования изображения полос с периодом, определяемым порядковым номером канала, тем большим, чем больше номер канала.
С выхода каждого модулятора 31-3N снимается сигнал, формируемый за счет пространственной модуляции сигнала, соответствующего изображению полос структурированной подсветки, полученному на поверхности контролируемого объекта, сигналом с выхода соответствующего генератора опорного сигнала 41-4N. Сигналы с выхода каждого модулятора 31-3N (фиг.3-5) поступают на вход соответствующего запоминающего устройства 51-5N.
При этом известно, что информация о неоднородностях профиля контролируемого объекта ΔZ(x;y) содержится в искривлениях полос структурированной подсветки, проецируемых на поверхность контролируемого объекта. Номер полосы кодирует координату Y, прогиб полос - координату Z, положение точек на полосе - координату X. В связи с этим высота неоднородностей и, соответственно, координаты профиля поверхности контролируемого объекта определяются в соответствии с зависимостью ΔZ(x;y)=ΔY(x,y)tgα, где ΔY(x,y) - отступление от прямолинейности полосы в точке с координатами (x,y); α - угол падения излучения от источника структурированной подсветки.
Однако при наличии разрывов в изображении полос, которое регистрирует телекамера (TV) 2, возникает проблема, заключающаяся в том, чтобы однозначно определить, является ли этот разрыв следствием наличия сквозных отверстий, или этот разрыв - следствие затенения полосы дисперсными выступами на профиле объекта.
Причем для того, чтобы идентифицировать продолжение полосы после разрыва, необходимо проецировать полосы с низкой пространственной частотой. В этом случае вероятность несовпадения полос уменьшается. С другой стороны, малая пространственная частота не позволяет точно установить координаты X, Y и однозначно определить профиль контролируемого объекта. Возникающее противоречие устраняется в предлагаемом изобретении следующим образом. С выхода каждого из запоминающих устройств 51-5N сигнал, содержащий информацию о кодированном изображении полос структурированной подсветки, поступает на первый вход соответствующего интерполятора 61-6N. Совокупность блоков 61-6N образует многокаскадный итерационный интерполятор, в котором последовательно идентифицируются, а затем интерполируются разрывы полос в изображении структурированной подсветки.
Результат интерполяции в интерполяторе 6k поступает на второй вход интерполятора 6k+1, где сравнивается с изображением с выхода соответствующего запоминающего устройства 5k+1. При этом полосы, обработанные (дополненные либо интерпретированы, как пересекающие сквозные отверстия) в k-м интерполяторе не обрабатываются в k+1 интерполяторе. Сигнал с выхода N-го интерполятора поступает на вход блока определения координат рельефа поверхности контролируемого объекта, в котором и определяются координаты поверхности контролируемого объекта с учетом восстановленного в результате интерполяции изображения полос в местах их разрывов.
Таким образом, использование предлагаемого устройства для бесконтактного контроля профиля поверхности трехмерных объектов, содержащего N-канальный цифровой электронный блок обработки изображения искаженной структурированной подсветки, обеспечивающий идентификацию и интерполяцию разрывов полос, обеспечивает значительное повышение точности измерения профиля поверхности трехмерных объектов при одновременном повышении скорости определения неоднородностей профиля за счет последовательно-параллельной обработки изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ РЕЛЬЕФА ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2006 |
|
RU2316796C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2010 |
|
RU2439489C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185598C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2009 |
|
RU2433372C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2184933C1 |
| Способ бесконтактного измерения линейных размеров вращающихся трехмерных объектов | 2021 |
|
RU2772088C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199716C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469265C1 |
Изобретение относится к области измерительной техники и может быть использовано для контроля профиля трехмерных объектов, а также их визуализации. Устройство содержит источник подсветки участков поверхности объекта, блок регистрации изображения полос, блок определения координат рельефа поверхности. Включает N-канальный цифровой электронный блок обработки изображения полос, искаженных рельефом. Каждый из N каналов включает модулятор с двумя входами, генератор опорных сигналов, запоминающий элемент и интерполятор с двумя входами. Первый вход модулятора соединен с выходом соответствующего генератора опорных сигналов. Второй вход модулятора соединен с выходом блока регистрации изображения полос. Выход модулятора соединен с входом соответствующего запоминающего элемента. Первый вход интерполятора соединен с выходом соответствующего запоминающего устройства. Второй вход интерполятора соединен с входом интерполятора из канала с номером на единицу меньше, а выход N-го интерполятора соединен с входом блока определения координат рельефа поверхности контролируемого объекта. Технический результат - повышение точности измерения профиля поверхности трехмерных объектов при одновременном повышении скорости определения неоднородностей профиля. 5 ил.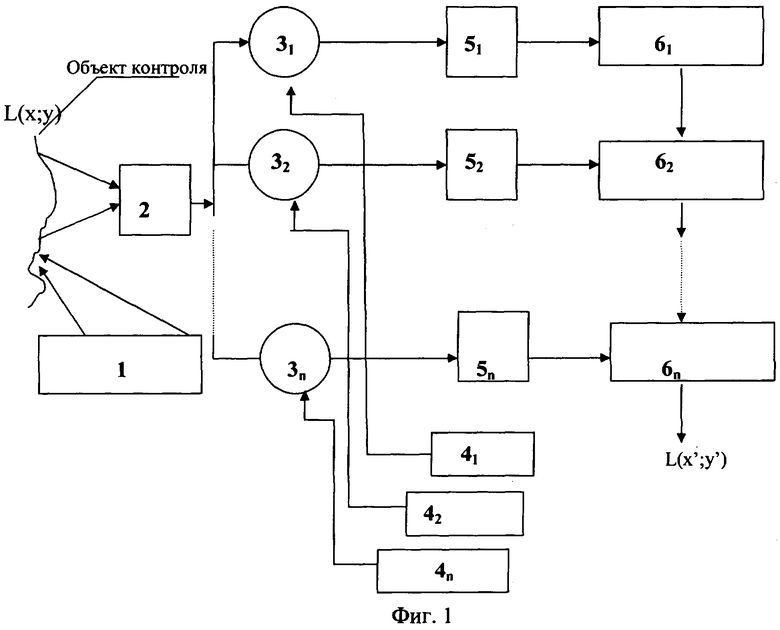
Устройство для бесконтактного контроля профиля поверхности трехмерных объектов, содержащее источник подсветки участков поверхности объекта в виде полос, блок регистрации изображения полос, искаженных рельефом поверхности контролируемого объекта, и блок определения координат рельефа поверхности контролируемого объекта, отличающееся тем, что дополнительно включает N-канальный цифровой электронный блок обработки изображения полос, искаженных рельефом поверхности контролируемого объекта, причем число N определяется из соотношения N=entier(Ymax/ΔYmax), где Ymax - максимальный размер регистрируемого изображения; ΔYmax - требуемая точность определения координат рельефа поверхности контролируемого объекта, а каждый из N каналов включает модулятор с двумя входами, генератор опорных сигналов, запоминающий элемент и интерполятор с двумя входами, при этом первый вход модулятора соединен с выходом соответствующего генератора опорных сигналов, каждый из N генераторов опорных сигналов выполнен с возможностью формирования сигнала, кодирующего изображение полос с периодом, определяемым порядковым номером канала, тем большим, чем больше номер канала, второй вход модулятора соединен с выходом блока регистрации изображения полос, искаженных рельефом поверхности контролируемого объекта, выход модулятора соединен с входом соответствующего запоминающего элемента, первый вход интерполятора, выполненного с возможностью выявления и интерполирования разрывов полос в изображении полос, искаженных рельефом поверхности контролируемого объекта, соединен с выходом соответствующего запоминающего устройства, второй вход интерполятора в каждом канале, кроме первого, соединен с входом интерполятора из канала с номером на единицу меньше, а выход N-го интерполятора соединен с входом блока определения координат рельефа поверхности контролируемого объекта.
| WO 02075243, 26.09.2002 | |||
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2184933C1 |
| WO 9958930, 18.11.1999 | |||
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |

