Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности бортового приемоиндикатора спутниковой радионавигационной системы (СРНС).
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ контроля работоспособности бортового приемоиндикатора СРНС (см., например, патент на изобретение №2791603 от 13.03.2023 г), заключающийся в том, что с использованием бортового приемоиндикатора СРНС измеряют значения hПИi высоты полета летательного аппарата (ЛА) и его координаты xi и yi в горизонтальной плоскости на протяжении полета ЛА, где  I - число контрольных моментов времени на протяжении полета ЛА, с использованием радиовысотомера измеряют текущие значения hPBi относительной высоты полета ЛА на протяжении его полета, с использованием цифровой карты местности (ЦКМ) определяют соответствующие координатам xi и yi значения hPi высоты рельефа местности, с использованием датчика углового положения (ДУП) измеряют значения тангажа ϑi и крена γi ЛА на протяжении его полета, определяют значение индикатора χϑi необходимости корректировки величины hPBi по тангажу, для этого сравнивают значение тангажа ϑi с половиной ширины диаграммы направленности антенны (ШДНА) радиовысотомера, если значение тангажа ϑi больше половины ШДНА радиовысотомера, то формируют решение хϑi=1 о необходимости корректировки величины hPBi по тангажу, в противном случае формируют решение χϑi=0 об отсутствии необходимости корректировки величины hPBi по тангажу, определяют значение индикатора χyi необходимости корректировки величины hPBi по крену, для этого сравнивают значение крена γi с половиной ШДНА радиовысотомера, если значение крена γi больше половины ШДНА радиовысотомера, то принимают решение χγi=1 о необходимости корректировки величины hPBi по крену, в противном случае принимают решение χyi=0 об отсутствии необходимости корректировки величины hPBi по крену, с использованием величин hPBi, χϑi, ϑi, γi, χγi определяют скорректированное значение
I - число контрольных моментов времени на протяжении полета ЛА, с использованием радиовысотомера измеряют текущие значения hPBi относительной высоты полета ЛА на протяжении его полета, с использованием цифровой карты местности (ЦКМ) определяют соответствующие координатам xi и yi значения hPi высоты рельефа местности, с использованием датчика углового положения (ДУП) измеряют значения тангажа ϑi и крена γi ЛА на протяжении его полета, определяют значение индикатора χϑi необходимости корректировки величины hPBi по тангажу, для этого сравнивают значение тангажа ϑi с половиной ширины диаграммы направленности антенны (ШДНА) радиовысотомера, если значение тангажа ϑi больше половины ШДНА радиовысотомера, то формируют решение хϑi=1 о необходимости корректировки величины hPBi по тангажу, в противном случае формируют решение χϑi=0 об отсутствии необходимости корректировки величины hPBi по тангажу, определяют значение индикатора χyi необходимости корректировки величины hPBi по крену, для этого сравнивают значение крена γi с половиной ШДНА радиовысотомера, если значение крена γi больше половины ШДНА радиовысотомера, то принимают решение χγi=1 о необходимости корректировки величины hPBi по крену, в противном случае принимают решение χyi=0 об отсутствии необходимости корректировки величины hPBi по крену, с использованием величин hPBi, χϑi, ϑi, γi, χγi определяют скорректированное значение  относительной высоты полета ЛА, с использованием величин
относительной высоты полета ЛА, с использованием величин  и hPi определяют скорректированное значение
и hPi определяют скорректированное значение  абсолютной высоты полета ЛА, определяют модуль Mi разности между величинами и hПИi, сравнивают модуль Mi с заданным допустимым отклонением А/г, если модуль Mi больше заданного допустимого отклонения Δh, то формируют решение о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют решение о работоспособности приемоиндикатора СРНС.
абсолютной высоты полета ЛА, определяют модуль Mi разности между величинами и hПИi, сравнивают модуль Mi с заданным допустимым отклонением А/г, если модуль Mi больше заданного допустимого отклонения Δh, то формируют решение о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют решение о работоспособности приемоиндикатора СРНС.
К недостаткам прототипа относится снижение достоверности контроля работоспособности бортового приемоиндикатора СРНС в условиях несоответствия реальных высот рельефа местности значениям, записанным в ЦКМ. Возможные случаи данного несоответствия объясняются тем, что реальный рельеф определенных участков местности подвержен динамичному изменению как по естественным, так и по искусственным причинам, при этом внесение соответствующих изменений в ЦКМ всегда отстает по времени от реального изменения рельефа местности. Это в свою очередь обуславливает возрастание вероятности формирования ошибочных решений о неработоспособности бортового приемоиндикатора СРНС в соответствии с прототипом и, как следствие, приводит к снижению достоверности контроля работоспособности бортового приемоиндикатора СРНС в целом.
Таким образом, формируемое в соответствии с прототипом решение о работоспособности или неработоспособности борового приемоиндикатора СРНС существенно зависит от степени соответствия реальных высот рельефа местности их значениям, записанным в ЦКМ. При этом, чем ниже степень данного соответствия, тем ниже достоверность контроля работоспособности бортового приемоиндикатора СРНС.
Техническим результатом изобретения является повышение достоверности контроля работоспособности бортового приемоиндикатора СРНС.
Указанный результат достигается тем, что в известном способе, если модуль разности между величинами  и hПИi больше заданного допустимого отклонения Δh1, то формируют первое частное решение q1i,=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют первое частное решение q1i=1 о работоспособности приемоиндикатора СРНС, дополнительно измеряют значения hБi высоты полета ЛА с использованием барометрического высотомера на протяжении полета ЛА, после формирования первого частного решения q1i о работоспособности или неработоспособности бортового приемоиндикатора определяют значение модуля M2i разности между величинами hБi и hПИi, сравнивают модуль M2i с заданным допустимым отклонением Δh2, если модуль M2i больше заданного допустимого отклонения Δh2, то формируют второе частное решение q2i=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют второе частное решение q2i=1 о работоспособности приемоиндикатора СРНС, суммируют значения первого q1i и второго q2i частных решений, если данная сумма равна нулю, то формируют итоговое решение ql,=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют итоговое решение ^=1 о работоспособности бортового приемоиндикатора СРНС.
и hПИi больше заданного допустимого отклонения Δh1, то формируют первое частное решение q1i,=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют первое частное решение q1i=1 о работоспособности приемоиндикатора СРНС, дополнительно измеряют значения hБi высоты полета ЛА с использованием барометрического высотомера на протяжении полета ЛА, после формирования первого частного решения q1i о работоспособности или неработоспособности бортового приемоиндикатора определяют значение модуля M2i разности между величинами hБi и hПИi, сравнивают модуль M2i с заданным допустимым отклонением Δh2, если модуль M2i больше заданного допустимого отклонения Δh2, то формируют второе частное решение q2i=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют второе частное решение q2i=1 о работоспособности приемоиндикатора СРНС, суммируют значения первого q1i и второго q2i частных решений, если данная сумма равна нулю, то формируют итоговое решение ql,=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют итоговое решение ^=1 о работоспособности бортового приемоиндикатора СРНС.
Сущность изобретения заключается в том, что итоговое решение о работоспособности или неработоспособности бортового приемоиндикатора формируется на основе двух частных решений о работоспособности или неработоспособности бортового приемоиндикатора, первое из которых формируется с использованием поступающих от ЦКМ значений высоты рельефа местности и поступающих от радиовысотомера значений относительной высоты полета ЛА, скорректированных при необходимости с учетом поступающих от ДУЛ значений тангажа и крена ЛА, а второе частное решение формируется с использованием не зависящих от рельефа местности значений высоты полета ЛА, поступающих от барометрического высотомера. При этом итоговое решение о неработоспособности бортового приемоиндикатора СРНС формируется только в том случае, если и первое и второе частные решения соответствуют данному итоговому решению. Это позволяет исключить существенное количество ошибочных решений о неработоспособности бортового приемоиндикатора СРНС, вызванных несоответствием записанных в ЦКМ значений высот реальным значениям высот рельефа местности и, как следствие, приводит к повышению достоверности контроля работоспособности бортового приемоиндикатора СРНС в целом.
Данный способ включает в себя следующие этапы:
1. Измерение значений hПИi высоты полета ЛА с использованием бортового приемоиндикатора СРНС на протяжении полета ЛА, где  I - число контрольных моментов времени на протяжении полета ЛА;
I - число контрольных моментов времени на протяжении полета ЛА;
2. Измерение координат xi и γi ЛА в горизонтальной плоскости с использованием бортового приемоиндикатора СРНС на протяжении полета ЛА;
3. Измерение текущих значений hPBi относительной высоты полета ЛА с использованием радиовысотомера на протяжении полета ЛА;
4. Измерение значений hБi высоты полета ЛА с использованием барометрического высотомера на протяжении полета ЛА;
5. Определение значений hPi высоты рельефа местности,
соответствующей координатам xi и yi, с использованием ЦКМ;
6. Измерение значений тангажа ϑi и крена γi ЛА с использованием ДУПЛА;
7. Определение значения индикатора χϑi необходимости корректировки величины hPBi по тангажу в соответствии с выражением
где Δθ - ШДНА радиовысотомера; χϑi=1 - необходимость корректировки величины hPBi по тангажу имеется, χϑi=0 - необходимость корректировки относительной высоты полета ЛА по тангажу отсутствует.
В соответствии с выражением (1) индикатор χϑi принимает значение 1, то есть принимается решение о необходимости корректировки величины hPBi по тангажу, только в случае, если значение тангажа превышает половину ШДНА радиовысотомера.
8. Определение значения индикатора χϑi необходимости корректировки величины hPBi по крену в соответствии с выражением
где χγi=1 - имеется необходимость корректировки величины hPBi по крену, Xγi=0 - необходимость корректировки относительной высоты полета ЛА по крену отсутствует.
В соответствии с выражением (2) индикатор χγi принимает значение 1, то есть принимается решение о необходимости корректировки величины hPBi по крену, только в случае, если значение крена превышает половину ШДНА радиовысотомера.
9. Определение скорректированного значения  относительной высоты полета ЛА в соответствии с выражением
относительной высоты полета ЛА в соответствии с выражением

10. Определение скорректированного значения  абсолютной высоты полета ЛА в соответствии с выражением
абсолютной высоты полета ЛА в соответствии с выражением

11. Определение значения модуля M1i разности между величинами  и hПИi в соответствии с выражением
и hПИi в соответствии с выражением

12. Формирование первого частного решения о работоспособности или неработоспособности приемоиндикатора СРНС в соответствии с выражением

где Δh1 - заданное допустимое отклонение между величинами  и hПИi
и hПИi
q1i=0 - первое частное решение о неработоспособности бортового приемоиндикатора СРНС на i-й контрольный момент времени, q1i=1 - первое частное решение о работоспособности бортового приемоиндикатора СРНС на i -й контрольный момент времени.
В соответствии с этапами 1-12 первое частное решение q1i=0 о неработоспособности бортового приемоиндикатора СРНС формируется в том случае, если модуль разности величин  и hПИi превышает заданное допустимое отклонение Δh1, в противном случае формируется первое частное решение q1i=1 о работоспособности бортового приемоиндикатора СРНС. При этом данное решение формируется с использованием значений высоты рельефа местности, поступающих от ЦКМ и значений относительной высоты полета ЛА, поступающих от радиовысотомера, скорректированных при необходимости с учетом значений тангажа и крена ЛА, поступающих от ДУЛ.
и hПИi превышает заданное допустимое отклонение Δh1, в противном случае формируется первое частное решение q1i=1 о работоспособности бортового приемоиндикатора СРНС. При этом данное решение формируется с использованием значений высоты рельефа местности, поступающих от ЦКМ и значений относительной высоты полета ЛА, поступающих от радиовысотомера, скорректированных при необходимости с учетом значений тангажа и крена ЛА, поступающих от ДУЛ.
13. Определение значения модуля M2i разности между величинами hБi и hПИi в соответствии с выражением

14. Формирование второго частного решения о работоспособности или неработоспособности приемоиндикатора СРНС в соответствии с выражением

где Δh2 - заданное допустимое отклонение между величинами hБi и hПИi, q2i=0 - второе частное решение о неработоспособности бортового приемоиндикатора СРНС на i-й контрольный момент времени, q2i=1 - второе частное решение о работоспособности бортового приемоиндикатора СРНС на i-й контрольный момент времени.
В соответствии с этапами 13-14 второе частное решение q2i=0 о неработоспособности бортового приемоиндикатора СРНС формируется в том случае, если модуль разности величин h2i и hПИi превышает заданное допустимое отклонение Δh2, в противном случае формируется второе частное решение q2i=1 о работоспособности бортового приемоиндикатора СРНС. При этом данное частное решение формируется с использованием не зависящих от рельефа местности значений высоты полета ЛА, поступающих от барометрического высотомера.
15. Формирование итогового решения о работоспособности или неработоспособности приемоиндикатора СРНС в соответствии с выражением

где qi=0 - итоговое решение о неработоспособности бортового приемоиндикатора СРНС на i-й контрольный момент времени, qi,=1 - итоговое решение о работоспособности бортового приемоиндикатора СРНС на i -й контрольный момент времени.
В соответствии выражением (9) итоговое решение qi=0 о неработоспособности бортового приемоиндикатора СРНС формируется в том случае, если сумма значений первого q1i и второго q2i частных решений равна нулю, то есть, если и первое q1i и второе q2i частные решения соответствуют данному итоговому решению, в противном случае формируется итоговое решение qi=1 о работоспособности бортового приемоиндикатора СРНС. Это позволяет исключить существенное количество ошибочных решений о неработоспособности бортового приемоиндикатора СРНС, вызванных несоответствием записанных в ЦКМ значений высот реальным значениям высот рельефа местности и, как следствие, приводит к повышению достоверности контроля работоспособности бортового приемоиндикатора СРНС в целом.
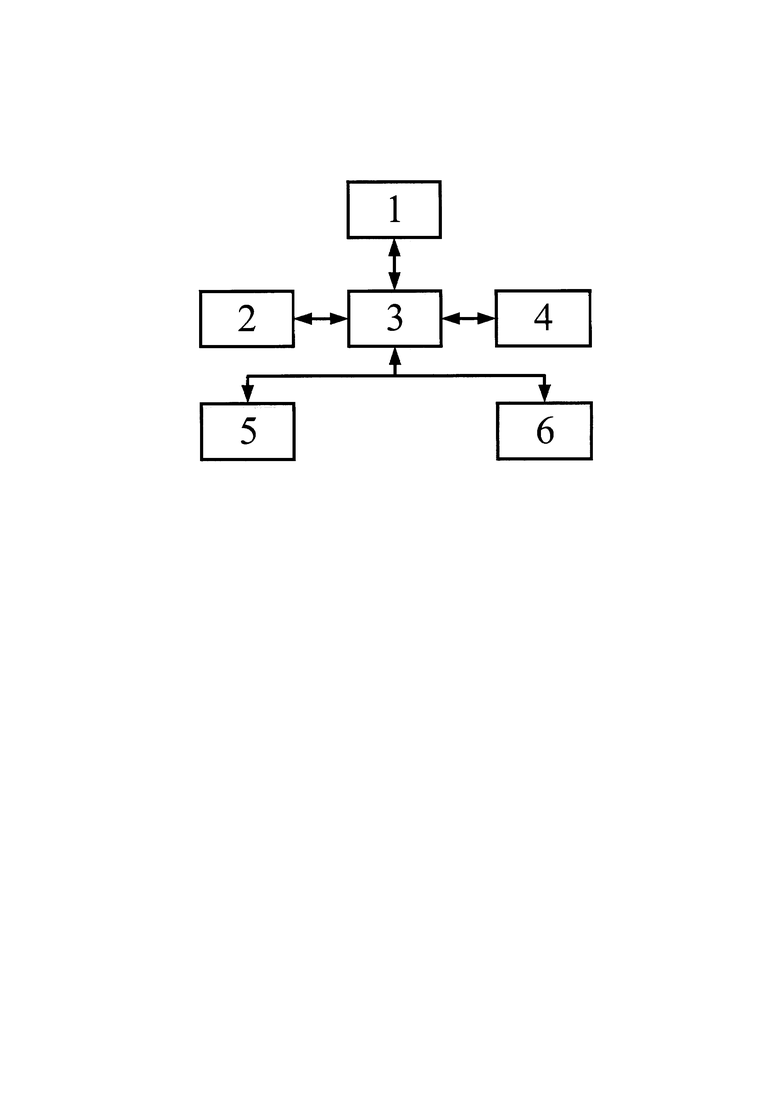
Данный способ может быть реализован, например, с помощью комплекса устройств и систем, структурная схема которого приведена на фигуре, где обозначено: 1 - бортовой приемоиндикатор СРНС; 2 - радиовысотомер; 3 - блок управления и обработки информации (БУОИ); 4 - датчик углового положения (ДУЛ); 5 - цифровая карта местности (ЦКМ); 6 - барометрический высотомер.
Бортовой приемоиндикатор СРНС 1 предназначен для формирования навигационных измерений, в том числе значений hПИi высоты (абсолютной высоты) полета ЛА и его координат xi и yi в горизонтальной плоскости на протяжении полета ЛА. Радиовысотомер 2 предназначен для измерения текущих значений hPBi относительной высоты полета ЛА на протяжении его полета. БУОИ 3 предназначен для управления совместной работой элементов комплекса и для обработки информации. ДУЛ 4 предназначен для измерения значений тангажа ϑi и крена γi ЛА на протяжении его полета. ЦКМ 5 предназначена для хранения и своевременной выдачи значений hPi высоты рельефа местности (каждое отдельное значение hPi соответствует паре координат xi и yi). Барометрический высотомер предназначен для измерения значений hБi высоты (абсолютной высоты) полета ЛА на протяжении его полета.
Комплекс работает следующим образом. БУОИ 3 управляет совместной работой элементов комплекса. Бортовой приемоиндикатор 1 формирует навигационные измерения, в том числе значения hПИi высоты полета ЛА и его координаты х1. и yi в горизонтальной плоскости на протяжении полета ЛА. Радиовысотомер 2 измеряет текущие значения hPBi относительной высоты полета ЛА на протяжении его полета. ДУП 4 измеряет значения тангажа ϑi и крена yi ЛА на протяжении его полета. Барометрический высотомер 6 измеряет значения hБi высоты полета ЛА на протяжении его полета. Под воздействием управляющих сигналов БУОИ 3 информация с выходов бортового приемоиндикатора СРНС 1, радиовысотомера 2, ДУП 4, ЦКМ 5 и барометрического высотомера 6 поступает на БУОИ 3 в i-e контрольные моменты времени. При этом с выхода бортового приемоиндикатора СРНС 1 на вход БУОИ 3 поступает значения hПИi высоты полета ЛА и его координаты xi и yi в горизонтальной плоскости. С выхода радиовысотомера 2 на вход БУОИ 3 поступают текущие значения hPBi относительной высоты полета ЛА. С выхода ДУП 4 на вход БУОИ 3 поступают значения тангажа ϑi и крена γi ЛА. С выхода ЦКМ 5 на вход БУОИ 3 поступают соответствующие паре координат xi и yi значения hPi высоты рельефа местности. С выхода барометрического высотомера 6 на вход БУОИ 3 поступают значения hБi высоты полета ЛА. БУОИ 3 обрабатывает поступающую информацию в соответствии с выражениями (1) - (8) и формирует итоговое решение о работоспособности или неработоспособности бортового приемоиндикатора СРНС в соответствии с выражением (9).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ контроля работоспособности бортового приемоиндикатора СРНС, сущность которого заключается в том, что итоговое решение о работоспособности или неработоспособности бортового приемоиндикатора формируется на основе двух частных решений о работоспособности или неработоспособности бортового приемоиндикатора, первое из которых формируется с использованием поступающих от ЦКМ значений высоты рельефа местности и поступающих от радиовысотомера значений относительной высоты полета ЛА, скорректированных при необходимости с учетом поступающих от ДУП значений тангажа и крена ЛА, а второе частное решение формируется с использованием не зависящих от рельефа местности значений высоты полета ЛА, поступающих от барометрического высотомера. При этом итоговое решение о неработоспособности бортового приемоиндикатора СРНС формируется только в том случае, если и первое и второе частные решения соответствуют данному итоговому решению.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если итоговое решение о работоспособности или неработоспособности бортового приемоиндикатора формировать на основе двух частных решений о работоспособности или неработоспособности бортового приемоиндикатора, первое из которых формировать с использованием поступающих от ЦКМ значений высоты рельефа местности и поступающих от радиовысотомера значений относительной высоты полета ЛА, скорректированных при необходимости с учетом поступающих от ДУП значений тангажа и крена ЛА, а второе частное решение формировать с использованием не зависящих от рельефа местности значений высоты полета ЛА, поступающих от барометрического высотомера, при этом итоговое решение о неработоспособности бортового приемоиндикатора СРНС формировать только в том случае, если и первое и второе частные решения соответствуют данному итоговому решению, то это приведет к повышению вероятности правильного контроля работоспособности бортового приемоиндикатора СРНС.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ БОРТОВОГО ПРИЕМОИНДИКАТОРА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2022 |
|
RU2791603C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ БОРТОВОГО ПРИЕМОИНДИКАТОРА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2003 |
|
RU2254591C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ БАРОМЕТРИЧЕСКОГО ВЫСОТОМЕРА С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ СИСТЕМЫ МЕСТООПРЕДЕЛЕНИЯ | 2006 |
|
RU2316785C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2654955C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ АБСОЛЮТНОЙ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2346242C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОЙ ВЫСОТЫ ПОЛЕТА РАКЕТЫ КЛАССА "ВОЗДУХ-ПОВЕРХНОСТЬ" | 2002 |
|
RU2249830C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2177897C1 |
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств контроля работоспособности бортового приемоиндикатора спутниковой радионавигационной системы (СРНС). Техническим результатом изобретения является повышение достоверности контроля работоспособности бортового приемоиндикатора СРНС. В заявленном способе итоговое решение о работоспособности или неработоспособности бортового приемоиндикатора формируется на основе двух частных решений о работоспособности или неработоспособности бортового приемоиндикатора, первое из которых формируется с использованием поступающих от цифровой карты местности (ЦКМ) значений высоты рельефа местности и поступающих от радиовысотомера значений относительной высоты полета летательного аппарата (ЛА), скорректированных при необходимости с учетом поступающих от датчика углового положения значений тангажа и крена ЛА. А второе частное решение формируется с использованием не зависящих от рельефа местности значений высоты полета ЛА, поступающих от барометрического высотомера. При этом итоговое решение о неработоспособности бортового приемоиндикатора СРНС формируется только в том случае, если и первое и второе частные решения соответствуют данному итоговому решению. Это позволяет исключить существенное количество ошибочных решений о неработоспособности бортового приемоиндикатора СРНС, вызванных несоответствием записанных в ЦКМ значений высот реальным значениям высот рельефа местности и, как следствие, приводит к повышению достоверности контроля работоспособности бортового приемоиндикатора СРНС в целом. 1 ил.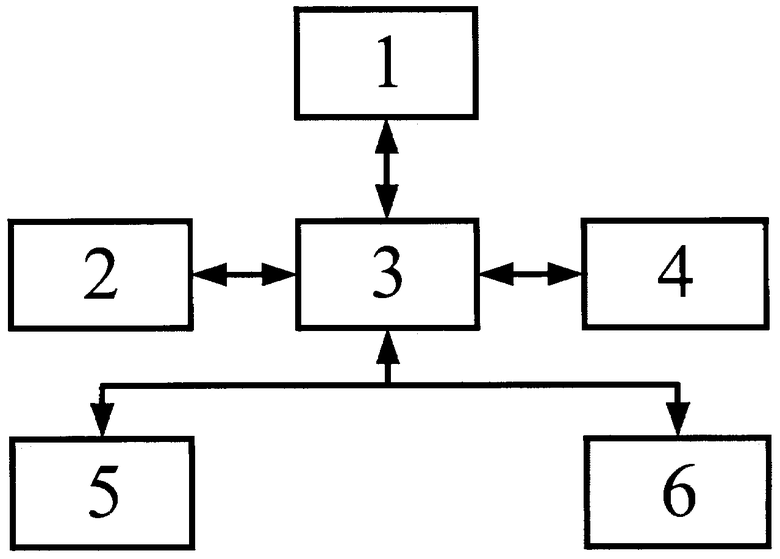
Способ контроля работоспособности бортового приемоиндикатора спутниковой радионавигационной системы (СРНС), заключающийся в том, что с использованием бортового приемоиндикатора СРНС измеряют значения hПИi высоты полета летательного аппарата (ЛА) и его координаты xi и yi в горизонтальной плоскости на протяжении полета ЛА, где  I - число контрольных моментов времени на протяжении полета ЛА, с использованием радиовысотомера измеряют текущие значения hPBi относительной высоты полета ЛА на протяжении его полета, с использованием цифровой карты местности определяют соответствующие координатам xi и yi значения hPi высоты рельефа местности, с использованием датчика углового положения измеряют значения тангажа ϑi и крена γi ЛА на протяжении его полета, определяют значение индикатора χϑi необходимости корректировки величины hPBi по тангажу, для этого сравнивают значение тангажа ϑi с половиной ширины диаграммы направленности антенны (ШДНА) радиовысотомера, если значение тангажа ϑi больше половины ШДНА радиовысотомера, то формируют решение χϑi=1 необходимости корректировки величины hPBi по тангажу, в противном случае формируют решение χϑi=0 об отсутствии необходимости корректировки величины hPBi по тангажу, определяют значение индикатора χγi необходимости корректировки величины hPBi по крену, для этого сравнивают значение крена γi с половиной ШДНА радиовысотомера, если значение крена γi больше половины ШДНА радиовысотомера, то принимают решение χγi=1 о необходимости корректировки величины hPBi по крену, в противном случае принимают решение χγi=0 об отсутствии необходимости корректировки величины hPBi по крену, с использованием величин hPBi, χϑi, ϑi, γi, χγi определяют скорректированное значение
I - число контрольных моментов времени на протяжении полета ЛА, с использованием радиовысотомера измеряют текущие значения hPBi относительной высоты полета ЛА на протяжении его полета, с использованием цифровой карты местности определяют соответствующие координатам xi и yi значения hPi высоты рельефа местности, с использованием датчика углового положения измеряют значения тангажа ϑi и крена γi ЛА на протяжении его полета, определяют значение индикатора χϑi необходимости корректировки величины hPBi по тангажу, для этого сравнивают значение тангажа ϑi с половиной ширины диаграммы направленности антенны (ШДНА) радиовысотомера, если значение тангажа ϑi больше половины ШДНА радиовысотомера, то формируют решение χϑi=1 необходимости корректировки величины hPBi по тангажу, в противном случае формируют решение χϑi=0 об отсутствии необходимости корректировки величины hPBi по тангажу, определяют значение индикатора χγi необходимости корректировки величины hPBi по крену, для этого сравнивают значение крена γi с половиной ШДНА радиовысотомера, если значение крена γi больше половины ШДНА радиовысотомера, то принимают решение χγi=1 о необходимости корректировки величины hPBi по крену, в противном случае принимают решение χγi=0 об отсутствии необходимости корректировки величины hPBi по крену, с использованием величин hPBi, χϑi, ϑi, γi, χγi определяют скорректированное значение  относительной высоты полета ЛА, с использованием величин
относительной высоты полета ЛА, с использованием величин  и hPi определяют скорректированное значение
и hPi определяют скорректированное значение  абсолютной высоты полета ЛА, определяют модуль M1i разности между величинами
абсолютной высоты полета ЛА, определяют модуль M1i разности между величинами  и hПИi, сравнивают модуль M1i с заданным допустимым отклонением Δhi, отличающийся тем, что если модуль M1i больше заданного допустимого отклонения Δh1, то формируют первое частное решение q1i=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют первое частное решение q1i=1 о работоспособности приемоиндикатора СРНС, дополнительно измеряют значения hБi высоты полета ЛА с использованием барометрического высотомера на протяжении полета ЛА, после формирования первого частного решения q1i о работоспособности или неработоспособности бортового приемоиндикатора определяют значение модуля M2i разности между величинами hБi и hПИi, сравнивают модуль M2i с заданным допустимым отклонением Δh2, если модуль M2i больше заданного допустимого отклонения Δh2, то формируют второе частное решение q2i=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют второе частное решение q2i=1 о работоспособности приемоиндикатора СРНС, суммируют значения первого q1i и второго q2i частных решений, если данная сумма равна нулю, то формируют итоговое решение qi,=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют итоговое решение qi=1 о работоспособности бортового приемоиндикатора СРНС.
и hПИi, сравнивают модуль M1i с заданным допустимым отклонением Δhi, отличающийся тем, что если модуль M1i больше заданного допустимого отклонения Δh1, то формируют первое частное решение q1i=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют первое частное решение q1i=1 о работоспособности приемоиндикатора СРНС, дополнительно измеряют значения hБi высоты полета ЛА с использованием барометрического высотомера на протяжении полета ЛА, после формирования первого частного решения q1i о работоспособности или неработоспособности бортового приемоиндикатора определяют значение модуля M2i разности между величинами hБi и hПИi, сравнивают модуль M2i с заданным допустимым отклонением Δh2, если модуль M2i больше заданного допустимого отклонения Δh2, то формируют второе частное решение q2i=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют второе частное решение q2i=1 о работоспособности приемоиндикатора СРНС, суммируют значения первого q1i и второго q2i частных решений, если данная сумма равна нулю, то формируют итоговое решение qi,=0 о неработоспособности бортового приемоиндикатора СРНС, в противном случае формируют итоговое решение qi=1 о работоспособности бортового приемоиндикатора СРНС.
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ БОРТОВОГО ПРИЕМОИНДИКАТОРА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2022 |
|
RU2791603C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ БОРТОВОГО ПРИЕМОИНДИКАТОРА СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2003 |
|
RU2254591C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2654955C2 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ НАВИГАЦИОННОЙ АППАРАТУРЫ ПОТРЕБИТЕЛЯ ВОЗДУШНОГО СУДНА | 2022 |
|
RU2790508C1 |
| Способ и система формирования оценки абсолютной высоты полета летательного аппарата, многофункциональный маневренный самолет с такой системой | 2017 |
|
RU2671613C1 |
| CN 105783940 A, 20.07.2016 | |||
| US 6362776 B1, 26.03.2002 | |||
| US 2022299600 A1, 22.09.2022. | |||

