Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству управления приводом ворот.
Уровень техники
Способ данного типа известен из патентного документа ФРГ №19628238 А1. С помощью этого способа обеспечивается надежное функционирование привода ворот путем так называемого выключения по критерию потребляемой мощности. Это означает, что при повышенной потребляемой мощности привода ворот, в особенности, когда объект или человек блокирует ворота во время их привода, привод останавливается, чтобы избежать травмирования человека или повреждения объектов.
Согласно этому способу при вводе привода ворот в эксплуатацию проводят испытательный процесс, при котором определяют действительную потребляемую мощность привода ворот в ходе их перемещения. При этом процесс измерений проводят по меньшей мере за время полного цикла открытия и закрытия ворот.
Привод ворот содержит электромотор, с помощью которого приводятся ворота, в особенности ворота гаража. Потребляемую мощность привода ворот вычисляют посредством определения крутящего момента электромотора. Измерительный процесс проводят при постоянной максимальной скорости без ее снижения в конце операции перемещения ворот.
Операции открытия и закрытия привода ворот подразделяют на предварительно определенное число зон, при этом продолжительность каждой зоны может быть установлена в зависимости от определенных крутящих моментов. В пределах каждой зоны устанавливают максимальный допустимый крутящий момент. Максимальные допустимые крутящие моменты для отдельных зон устанавливают таким образом, что максимальный допустимый крутящий момент по меньшей мере равен наибольшему крутящему моменту, который был определен в ходе испытательного процесса в пределах данной зоны.
В ходе последующей эксплуатации привода ворот действительные регистрируемые крутящие моменты сравниваются с максимальными крутящими моментами соответствующих зон. Если действительный крутящий момент превышает максимальный крутящий момент для данной зоны, производится аварийная остановка привода ворот.
Данный способ обладает тем преимуществом, что при относительно небольших затратах на управление обеспечивается надежное функционирование привода ворот.
Особенное преимущество состоит в том, что за счет подразделения операций открытия и закрытия привода ворот на отдельные зоны для обеспечения надежного функционирования требуются небольшие затраты на управление.
Посредством подразделения операций открытия и закрытия привода ворот на зоны производится грубое разделение этих операций перемещения по растровой сетке. При этом каждой зоне присваивают только одну величину измерения в виде максимального допустимого крутящего момента в качестве критерия для выключения привода ворот.
Соответственно, для управления приводом ворот требуется немного точек измерения, так что управление может выполняться быстро и с небольшими затратами.
Недостатком данного способа является нежелательно большое время реагирования управления. В зависимости от положения действительного крутящего момента в пределах зоны и по отношению к максимальному допустимому крутящему моменту при защемлении препятствия в воротах может пройти значительный промежуток времени, пока действительный крутящий момент превысит максимальный допустимый крутящий момент. Вследствие этого происходит нежелательная продолжительная задержка при срабатывании аварийной остановки, что может привести к угрозе для человека. Кроме того, при монтаже приводов ворот необходимо соблюдать нормативы, которые определяют предельные величины этих задержек по времени. Соблюдение данных нормативов проблематично при использовании способа по патентному документу ФРГ №19628238 А1.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании способа и устройства указанного типа, которые обеспечивают надежное управление приводом ворот при минимальных возможных затратах на управление.
В соответствии с изобретением решение поставленной задачи достигается за счет признаков по п.п.1 и 12 формулы изобретения. Предпочтительные примеры осуществления и варианты их развития изложены в зависимых пунктах.
В способе управления электрическим приводом ворот в соответствии с изобретением вначале в ходе испытательного процесса определяют изменение во времени крутящих моментов привода ворот по меньшей мере для одной операции открытия и одной операции закрытия. Затем из этих определенных крутящих моментов выводят максимальные допустимые крутящие моменты для предварительно заданных зон в пределах операции открытия и операции закрытия. Во время последующей эксплуатации привода ворот сравнивают действительные крутящие моменты с максимальными крутящими моментами и действительные скорости привода ворот с предварительно заданными величинами скорости. При этом в том случае, если действительная скорость привода ворот ниже соответствующей заданной скорости, повышают действительную скорость привода ворот, а в том случае, если действительный крутящий момент превышает соответствующий максимальный допустимый крутящий момент, выключают привод ворот.
Таким образом, в способе по изобретению в качестве критерия выключения привода ворот определяют максимальные крутящие моменты в пределах отдельных зон операций открытия и закрытия, при этом осуществляется аварийная остановка привода ворот, если действительный крутящий момент привода ворот превышает соответствующий максимальный допустимый крутящий момент.
В соответствии с изобретением этот контроль выключения скомбинирован с контролем скорости привода ворот. При этом в особенно предпочтительном примере осуществления скорость привода ворот регулируется по заданному профилю скорости.
За счет этой комбинации обеспечивается не только надежное управление приводом ворот, но и достаточно быстрое реагирование выключения по критерию потребляемой мощности.
В случае, если какое-либо препятствие мешает работе управляемых ворот, происходит не только повышение потребной мощности, что соответствует повышению крутящего момента. Напротив, одновременно снижается число оборотов привода ворот, что соответствует снижению скорости, так что действительная скорость падает до величины ниже заданной величины скорости.
В соответствии с изобретением после этого действительную скорость повышают, причем предпочтительно она регулируется по заданной скорости. За счет этого не только повышается число оборотов привода ворот, но благодаря напряжению привода ворот повышается также сила тока и крутящий момент привода.
Таким образом, при вмешательстве препятствия достигается резкое повышение действительного крутящего момента и превышение им максимального допустимого крутящего момента. За счет этого получают кратчайшее время реагирования выключения по потребляемой мощности, так что, с одной стороны, надежно устраняется опасность для людей и объектов и, с другой стороны, обеспечивается соблюдение действующих нормативов времени по выключению привода.
При кратковременном повышении крутящего момента, например, из-за дополнительного трения в направляющих ворот при загрязнении или подобных причин, преодоление препятствия может быть достигнуто путем кратковременного повышения скорости без выключения мощности. За счет этого повышается надежность эксплуатации ворот.
Перечень фигур чертежей
Примеры осуществления настоящего изобретения, его дополнительные особенности и преимущества будут подробнее описаны ниже со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает схему устройства управления приводом ворот,
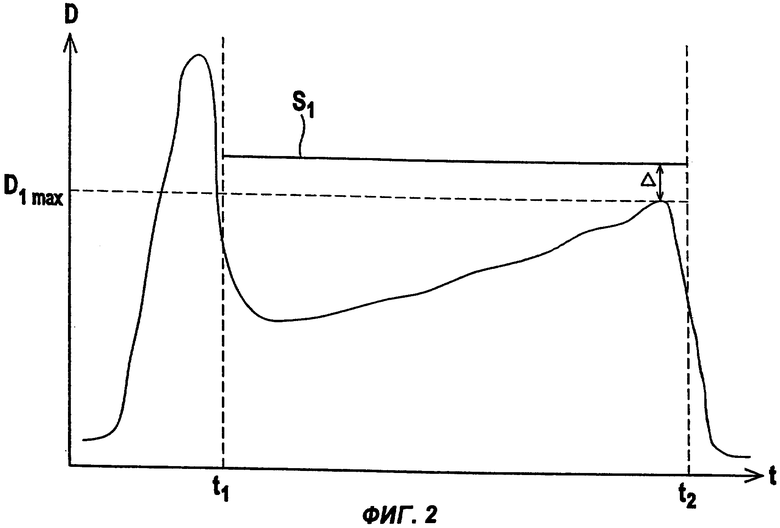
фиг.2 схематично изображает изменение во времени (характеристику) крутящего момента привода ворот по фиг.1 в ходе операции открытия,
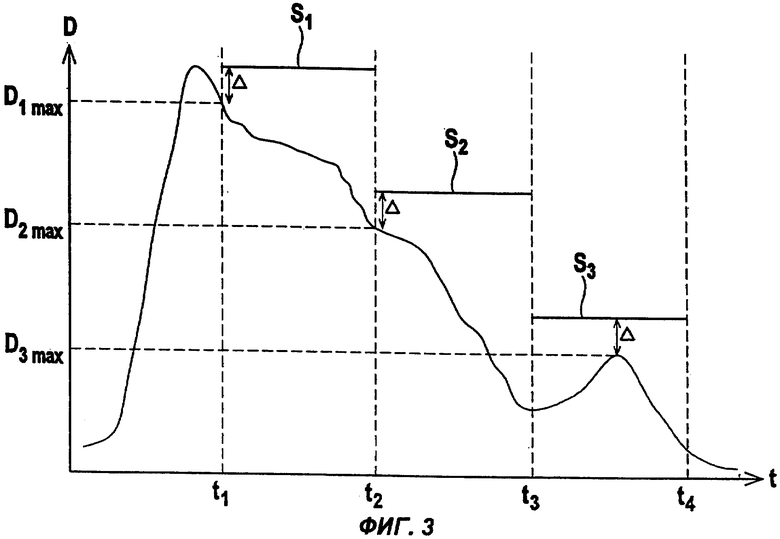
фиг.3 схематично изображает изменение во времени (характеристику) крутящего момента привода ворот по фиг.1 в ходе операции закрытия,
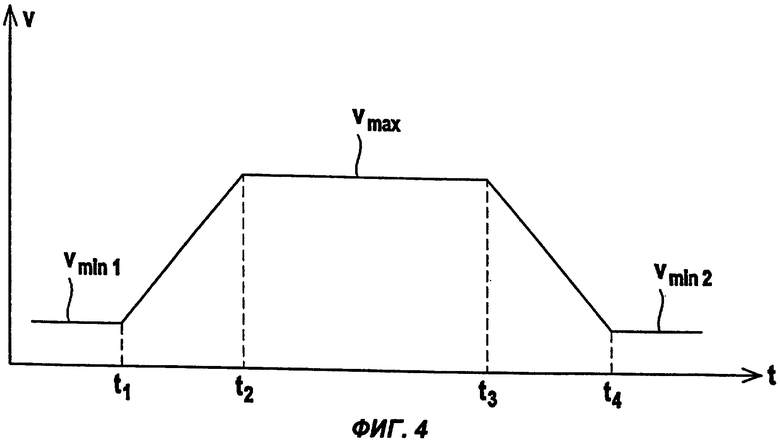
фиг.4 схематично изображает профиль скорости привода ворот по фиг.1 в ходе операции открытия.
Осуществление изобретения
На фиг.1 показана схема устройства управления приводом 1 ворот. Привод 1 ворот состоит по существу из электромотора, который приводит ворота 2. В данном случае ворота 2 выполнены в виде ворот гаража.
Для управления приводом 1 ворот предусмотрено вычислительное устройство 3, которое в целом образовано микропроцессорной системой. В вычислительном устройстве 3 предусмотрен блок 4 памяти для хранения данных и параметров. Кроме того, в вычислительном устройстве 3 имеется регулирующий блок 5, посредством которого регулируется скорость привода 1 ворот. И наконец, в вычислительном устройстве 3 имеется блок 6 измерения времени, который по существу содержит тактовый генератор для задания такта времени.
К вычислительному устройству 3 подсоединено измерительное устройство 7. В измерительном устройстве 7 предусмотрены средства для определения крутящего момента и средства для определения скорости привода 1 ворот.
Средства для определения крутящего момента образованы по существу измерительной схемой, с помощью которой измеряется сила тока, подаваемого в электромотор. Эта сила тока образует величину для вычисления крутящего момента привода 1 ворот. Определение крутящего момента служит для определения потребляемой мощности, при этом под понятием определения крутящего момента имеется в виду определение параметра для определения потребляемой мощности.
Средства для определения скорости привода 1 ворот образованы по существу измерительной схемой, с помощью которой измеряется число оборотов электромотора.
При совместном действии блока 6 измерения времени в вычислительном устройстве 3 и измерительного устройства 7 могут быть определены характеристики изменения во времени как скорости, так и крутящего момента привода 1 ворот.
Ворота 2 могут перемещаться между конечными верхним и нижним положениями, при этом для контроля конечных положений предусмотрены конечные выключатели, сигналы от которых направляются в привод 1 ворот.
Фиг.2 схематично изображает изменение крутящего момента привода 1 ворот во времени в ходе операции открытия, то есть в то время, как ворота 2 перемещаются из конечного нижнего положения в конечное верхнее положение. Соответственно фиг.3 изображает изменение крутящего момента привода 1 ворот во времени в ходе операции закрытия, то есть в то время, как ворота 2 перемещаются из конечного верхнего положения в конечное нижнее положение.
Как видно из характеристик по фиг.2 и 3, крутящий момент привода 1 ворот в начальной фазе операции открытия и закрытия резко возрастает. В ходе операции открытия по фиг.2 после начальной фазы крутящий момент резко падает и затем по существу возрастает непрерывно. Поскольку привод 1 ворот в их конечном верхнем положении выключается конечным выключателем 8, в конце операции открытия нет пика крутящего момента, как в начальной фазе.
В ходе операции закрытия по фиг.3 после начальной фазы крутящий момент падает по существу непрерывно. В этом случае также при достижении воротами конечного нижнего положения пик крутящего момента подавляется за счет выключения привода выключателем 8.
Перед вводом привода 1 ворот в эксплуатацию проводится испытательный процесс. В ходе испытательного процесса из изменения крутящего момента в ходе операций открытия и закрытия ворот определяют допустимые максимальные крутящие моменты, которые служат критерием потребляемой мощности для выключения при эксплуатации привода 1 ворот. Выключение по критерию потребляемой мощности предусматривает аварийную остановку привода 1 ворот в том случае, когда ворота 2 наталкиваются на препятствие.
В ходе испытательного процесса с помощью измерительного устройства 7 определяют изменение крутящего момента во времени как для полной операции открытия, так и для полной операции закрытия ворот. В принципе может производиться многократное определение кривой крутящего момента.
Кривые изменения (характеристики) крутящего момента подразделяют на несколько зон предварительно заданной продолжительности по времени. Число зон и интервалы времени могут выбираться с учетом особенностей конкретного привода 1 ворот и характера изменения крутящего момента.
В данном примере осуществления при разделении на зоны выделяют начальную фазу с пиком крутящего момента в ходе операций открытия и закрытия. Остальные участки характеристик подразделяют на зоны.
Как показано на фиг.2, для операции открытия определена только одна зона продолжительностью Т=t2-t1, причем эта зона охватывает всю характеристику изменения крутящего момента, примыкающую к начальной фазе.
Для операции закрытия в данном примере определены три зоны одинаковой продолжительности. Продолжительность первой зоны составляет T1=t2-t1. Продолжительность второй зоны составляет T2=t3-t2. Продолжительность третьей зоны составляет Т3=t4-t3.
В пределах каждой зоны 1 в вычислительном устройстве определяется максимальный крутящий момент Dimax. Из этой максимальной величины для каждой зоны i определяется соответствующая пороговая величина Si, которая образует максимальный допустимый крутящий момент в пределах этой зоны. В данном примере осуществления пороговые величины Si для зон i определены таким образом, что к максимальным крутящим моментам Dimax отдельных зон добавлена одна и та же положительная константа Δ. Таким образом, пороговые величины Si вычисляются по следующему уравнению:
Si=Dimax+Δ
В принципе для отдельных зон могут быть определены также переменные величины Δi, которые прибавляют к конкретной максимальной величине Dimax.
В данном примере осуществления в результате испытательного процесса для зоны операции открытия получена пороговая величина S1 как максимальный допустимый крутящий момент. Для трех зон i=1, 2, 3 операции закрытия получены пороговые величины S1, S2 и S3 как максимальные допустимые крутящие моменты.
В ходе последующей эксплуатации привода 1 ворот определяются действительные крутящие моменты, развиваемые во время операций открытия и закрытия, и эти величины сравниваются с максимальными допустимыми крутящими моментами. Таким образом, действительный крутящий момент в ходе операции открытия сравнивается с пороговой величиной S1 по фиг.2. В ходе операции закрытия это сравнение зависит от того, в какой зоне i лежит действительный крутящий момент. Он сравнивается с пороговой величиной S1, S2 или S3, относящейся к данной зоне.
Как только действительный крутящий момент превышает соответствующую пороговую величину Si, производится выключение по потребляемой мощности, при котором привод 1 ворот выключается по команде, выработанной вычислительным устройством 3. В вычислительном устройстве 3 может быть встроен выход выключения, который образует средство выключения для выполнения команды на выключение. В принципе могут быть предусмотрены также внешние средства выключения, такие как реле или подобные устройства.
Таким путем осуществляется эффективная защита людей или объектов, которые вмешиваются в привод 1 ворот и блокируют его. При надлежащей эксплуатации привода 1 ворот действительный крутящий момент всегда ниже пороговой величины Si, поскольку эти пороговые величины выведены в ходе испытательного процесса из реальных условий работы привода 1 ворот и, кроме того, выбраны такими, что пороговая величина Si зоны превышает развиваемый в зоне i максимальный крутящий момент.
Если препятствие блокирует ворота 2, потребляемая мощность привода 1 ворот и его крутящий момент повышаются, так что последний превышает соответствующую пороговую величину Si, и вследствие этого срабатывает выключение по потребляемой мощности.
В зависимости от положения действительного крутящего момента в пределах своей зоны проходит определенный промежуток времени, пока повышение крутящего момента из-за вмешательства препятствия приведет к срабатыванию выключения по потребляемой мощности.
Для снижения этой задержки по времени до возможного минимума дополнительно определяется действительная скорость привода 1 ворот и сравнивается с предварительно заданными величинами. Если действительная скорость меньше заданной величины, она вновь повышается.
При появлении препятствия в воротах 2 кроме повышения крутящего момента происходит также снижение числа оборотов, а следовательно, и снижение скорости привода 1 ворот. За счет следующего за этим повышения скорости привода 1 ворот повышается сила тока и вместе с ней повышается крутящий момент привода. Благодаря этому эффекту при вмешательстве препятствия возрастание крутящего момента ускоряется, так что значительно снижается время задержки между началом вмешательства препятствия и выключением по критерию потребляемой мощности. При кратковременном повышении крутящего момента, например, из-за трения, несмотря на кратковременное повышение скорости, действительный крутящий момент остается ниже соответствующей пороговой величины, так что предотвращается ненужное выключение по потребляемой мощности.
В особенно предпочтительном примере осуществления скорость привода 1 ворот является регулируемой. В качестве заданных величин предварительно задаются заданные профили скорости для операций открытия и закрытия. Фиг.4 изображает профиль скорости привода 1 ворот в ходе операции открытия. После выхода ворот 2 из конечного нижнего положения привод 1 ворот во время фазы ускорения в интервале времени между t1 и t2 ускоряется с постоянным ускорением от скорости vmin1 до скорости vmax. Затем следует фаза, в пределах которой скорость привода 1 ворот выдерживается постоянной при величине vmax. Эта фаза лежит в интервале времени между t2 и t3. Далее следует фаза замедления в интервале времени между t3 и t4. В течение этой фазы привод 1 ворот тормозится с постоянным градиентом скорости от скорости vmax до скорости vmin2. И в заключение привод 1 ворот выключается конечным выключателем 8 в конечном верхнем положении. В данном случае скорости vmin1 и vmin2 выбраны одинаковыми. Профиль заданной скорости для операции закрытия соответствует форме профиля скорости по фиг.4. Отличными могут быть только абсолютные величины заданных величин скорости, а также положения временных точек t1-t4, определяющих фазы операции.
При этом скорости vmin1, vmin2 и vmax заложены в блоке 4 памяти как параметры скорости для предварительного задания профилей скорости. Предпочтительно в блоке 4 памяти заложены также градиенты скорости в процессе ускорения и замедления.
Точное предварительное задание профилей скорости предпочтительно производят в ходе испытательного процесса. При этом испытательном процессе привод 1 ворот ускоряют от скорости vmin1 до скорости vmax, как это, например, показано на фиг.4, как в ходе операции открытия, так и в ходе операции закрытия. Затем обеспечивают работу привода 1 ворот с постоянной скоростью до достижения конечного положения и замеряют продолжительность действия привода. Из этой продолжительности в вычислительном устройстве 3 вычисляют временную точку t3, в которой следует начинать фазу замедления. Таким путем устанавливают заданный профиль скорости как для операции открытия, так и для операции закрытия.
Далее, во время эксплуатации скорость привода 1 ворот регулируют посредством регулирующего блока 5 для привода в соответствие с заданным профилем скорости.
Изобретение относится к способу и устройству управления приводом ворот. Техническим результатом является повышение надежности управления приводом ворот при минимальных возможных затратах на управление. В ходе испытательного процесса определяют изменения по времени крутящих моментов привода ворот по меньшей мере для одной операции открытия и одной операции закрытия ворот. Из этих определенных крутящих моментов выводят максимальные допустимые крутящие моменты для предварительно заданных зон в пределах операций открытия и закрытия. В процессе эксплуатации привода ворот сравнивают действительные крутящие моменты с максимальными крутящими моментами и действительные скорости привода ворот с предварительно заданными величинами скорости. В том случае, если действительная скорость привода ворот ниже соответствующей заданной скорости, действительная скорость привода ворот повышается. Однако в том случае, если действительный крутящий момент превышает соответствующий максимальный допустимый крутящий момент, происходит выключение привода ворот. 2 н. и 15 з.п. ф-лы, 4 ил.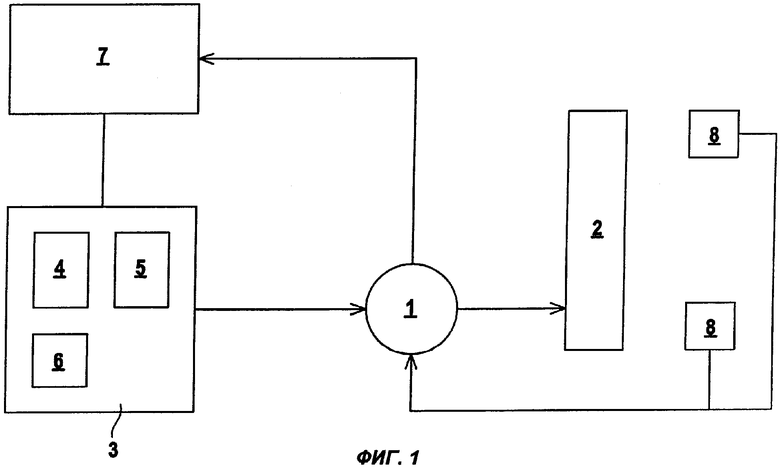
Si=Dimax+Δ,
где величина Δ является положительной константой.
| DE 19628238 А, 22.01.1998 | |||
| WO 00/42687 A, 20.07.2000 | |||
| Устройство для управления приводами ворот двойных тамбуров | 1980 |
|
SU901439A1 |
| Устройство для аварийного переключения привода ворот при встрече с препятствием | 1988 |
|
SU1553641A1 |

