Изобретение относится к области электротехники, а именно к электрическим машинам.
Известен частотно-регулируемый асинхронный электродвигатель (Унифицированная серия асинхронных двигателей. Интер-электро. Москва. Энергоиздат. 1990 г., стр.310-311) [1], в котором регулирование частоты напряжения осуществляется для запуска и разгона его по определенному закону по времени. Величина напряжения и его частота изменяются от нуля до номинальных величин при сохранении их отношения постоянным, и полезная мощность изменяется соответственно от нуля до номинальной величины.
Известен закон регулирования частоты напряжения и, соответственно, частоты вращения электродвигателя при постоянстве напряжения и постоянстве полезной мощности, при котором с ростом частоты напряжения уменьшается магнитный поток, возрастают индуктивные сопротивления и снижается максимальный момент, т.е. перегрузочная способность [1].
Известны частотно-регулируемые асинхронные электродвигатели, применяемые для привода главного движения станков с ЧПУ (Электрические машины. Справочник. Том 1. 1988 г., стр.268) [2], которые предназначены для работы с постоянным моментом при частоте вращения 0÷1500 об/мин и с постоянной номинальной мощностью Рн, соответствующей мощности при 1500 об/мин, при увеличении частоты вращения до 4000 об/мин.
Из вышеизложенного следует, что известные законы регулирования предполагают регулирование характеристик электродвигателей при полезной мощности в пределах от 0 до Рн.
Известны также асинхронные двигатели общепромышленного исполнения (Асинхронные двигатели. Справочник. Серия 4А. Москва. Энергоиздат. 1982 г.) [3], предназначенные для работы в повторно-кратковременном режиме. В таблице 2.5 представлены значения допустимых мощностей при различной продолжительности включения ПВ% от 100 до 15%. При выборе базовых асинхронных двигателей для работы в повторно-кратковременном режиме в справочнике рекомендуется исходить из значения допустимой нагрузки при заданной ПВ %. Например, мощность, которую может обеспечить один и тот же двигатель при изменении режима с длительного на ПВ 15%, увеличивается в 1,4÷2 раза для различных типоразмеров.
Это не удовлетворяет требованиям потребителя в получении значительно большей мощности в повторно-кратковременном и кратковременном режимах при достаточно малых размерах и массе электродвигателя. В практике энергопотребления существуют задачи многократного увеличения мощности электродвигателя при работе в кратковременном режиме по сравнению с работой в длительном режиме. Например, при закрывании шлюзов, массивных задвижек и т.п. в конце движения возникает необходимость кратковременного повышения мощности для обеспечения момента защелкивания какого-либо ограничителя; при приведении в движение больших инерционных масс требуется значительно большая мощность для обеспечения динамического момента разгона, чем для равномерного движения в длительном режиме.
Рекомендации по обеспечению работы аналогичных устройств с многократно увеличенной в кратковременном режиме мощностью отсутствуют. Следовательно, отсутствует аналог способа многократного изменения номинальной мощности одного и того же двигателя для работы в кратковременном режиме по сравнению с длительным.
Техническим результатом заявленных изобретений является многократное изменение номинальной мощности одного и того же частотно-регулируемого электродвигателя, уменьшение размеров и массы частотно-регулируемого электродвигателя для кратковременного режима.
Для достижения технического результата предлагается способ многократного изменения номинальной мощности частотно-регулируемого электродвигателя, заключающийся в том, что варьируют число витков фазы электродвигателя и при этом изменяют номинальную частоту напряжения таким образом, чтобы произведение числа витков фазы на номинальную частоту напряжения оставалось неизменным.
В качестве варианта осуществления способа предложен частотно-регулируемый электродвигатель, содержащий ротор и статор с якорной обмоткой, которая для обеспечения варьирования числа витков фазы выполнена разделенной на части с одинаковым числом витков с возможностью их соединения.
Разделение обмотки может быть выполнено таким образом, чтобы частью обмотки была катушечная группа полюса, либо может быть выполнено намоткой обмотки параллельными проводами, каждый из которых представляет собой упомянутую часть обмотки.
Для соединения и пересоединения частей обмотки электродвигатель может содержать коммутирующее устройство, подсоединенное к выводам ее частей.
Этот способ реализуется и работает как в асинхронном, так и в синхронном двигателе.
На чертеже показана конструкция частотно-регулируемого электродвигателя в асинхронном варианте для осуществления предложенного способа.
Сущность способа можно раскрыть следующим образом.
Рассмотрим вариант уменьшения числа витков фазы якорной обмотки частотно-регулируемого электродвигателя. Как известно (Сергеев П.С. и др. Проектирование электрических машин. Москва. Энергия. 1969 г., стр.120) [4], величина напряжения характеризуется выражением:

где Е - ЭДС фазы,
kо - обмоточный коэффициент,
fн - номинальная частота напряжения,
wн - число витков фазы,
Фн - магнитный поток.
При постоянной величине напряжения с уменьшением числа витков в k раз  и, соответственно, увеличением частоты напряжения в k раз f"=kfн, магнитный поток электродвигателя остается неизменным Ф"=Фн, т.к. fнwн=f"w". При этом частота вращения
и, соответственно, увеличением частоты напряжения в k раз f"=kfн, магнитный поток электродвигателя остается неизменным Ф"=Фн, т.к. fнwн=f"w". При этом частота вращения
где p - число пар полюсов,
увеличивается в k раз:
Максимальный момент асинхронного двигателя, определяющий его перегрузочную способность (Петров Г.Н. Электрические машины. Часть вторая. Госэнергоиздат. 1963 г. стр.87) [5], равен
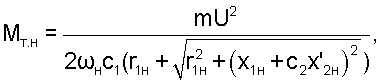
где m - число фаз,
 - угловая скорость вращения магнитного поля,
- угловая скорость вращения магнитного поля,
c1, c2 - коэффициенты рассеяния обмоток,
r1н - активное сопротивление обмотки якоря,
х1н - индуктивное сопротивление обмотки якоря,
x'2н - приведенное индуктивное сопротивление к.з. обмотки ротора.
Учитывая, что с1≈с2≈1 и r1н<<(x1н+х'2н), выражение можно упростить:
Индуктивные сопротивления x пропорциональны частоте напряжения и квадрату числа витков
 ,
,
где α - коэффициент пропорциональности.
При изменении числа витков и частоты напряжения каждое из индуктивных сопротивлений изменится:
изменится и угловая скорость вращения магнитного поля:

Тогда
Следовательно, при уменьшении числа витков и соответствующем увеличении частоты напряжения максимальный момент, а соответственно, и номинальный момент Мн остаются практически неизменными. Учитывая, что
где Рн - номинальная мощность в длительном режиме,
получаем номинальную мощность в кратковременном режиме

т.е. при уменьшении числа витков якорной обмотки и соответствующем увеличении частоты напряжения мощность частотно-регулируемого электродвигателя соответственно увеличивается.
В качестве примера действенности способа увеличения мощности может служить изготовленный на предприятии макетный образец, для которого базовым являлся асинхронный двигатель 4А80А4 [3] с числом витков фазы wн=360, имеющий при напряжении 380 В с частотой 50 Гц при номинальном моменте мощность 1,1 кВт. Макетный образец при k=6 имел число витков фазы  и обеспечил при напряжении 380 В с частотой 300 Гц при номинальном моменте мощность 7 кВт в кратковременном режиме.
и обеспечил при напряжении 380 В с частотой 300 Гц при номинальном моменте мощность 7 кВт в кратковременном режиме.
Таким образом, варьирование числа витков фазы при соответствующем изменении частоты напряжения приводит к соответствующему изменению номинальной мощности.
Частотно-регулируемый электродвигатель для осуществления способа содержит статор 1 с якорной обмоткой 2 и короткозамкнутый ротор 3. В конструкции электродвигателя может быть предусмотрено коммутирующее устройство 4, подсоединенное к выводам 5 частей обмотки 2. Якорная обмотка 2 с числом витков wн разделена на k равных частей с числом витков  с возможностью различного соединения частей. Соединение может быть или последовательным, или параллельным, или последовательно-параллельным в зависимости от режима работы и технологии намотки. Варианты разделения якорной обмотки на части и возможное количество частей можно показать на примере перемотки базового электродвигателя с числом пазов Z=48, с числом полюсов 2р=4, с числом пазов на полюс и фазу
с возможностью различного соединения частей. Соединение может быть или последовательным, или параллельным, или последовательно-параллельным в зависимости от режима работы и технологии намотки. Варианты разделения якорной обмотки на части и возможное количество частей можно показать на примере перемотки базового электродвигателя с числом пазов Z=48, с числом полюсов 2р=4, с числом пазов на полюс и фазу  , с числом витков фазы wн=96, с числом витков в секции wс=6.
, с числом витков фазы wн=96, с числом витков в секции wс=6.
Для двухслойной обмотки

Число частей обмотки k может быть равным числу параллельных ветвей a из катушечных групп полюсов, т.е.
k=a=2; p; 2р.
Для получения большего количества частей обмотки
k>2p
предлагается катушечную группу каждого полюса разделить на q частей. В таком случае число частей обмотки может быть
k=aq.
В рассматриваемом примере максимальное число частей
Однако допустимое число частей обмотки kдоп определяется исходя из длительности включения и потерь электродвигателя, т.е. допустимых перегревов, с учетом предельной частоты существующих частотных преобразователей. Если допустимое число частей обмотки kдоп не может соответствовать величинам
k=a или k=aq,
предлагается разделение якорной обмотки на части выполнить намоткой ее параллельными проводами, причем число параллельных проводов nпр в общем случае определяется из выражения
где aн - число параллельных ветвей при длительном режиме. В рассматриваемом примере при kдоп=6 число витков фазы якорной обмотки для кратковременного режима  При перемотке базового образца возможны различные варианты.
При перемотке базового образца возможны различные варианты.
При числе витков секции перемотанного образца wс"=2 и a=2 число витков фазы для кратковременного режима:
т.е. катушечные группы соединяют в две параллельные ветви. Число параллельных проводов при aн=1 равно
и они соединены параллельно.
При этом для получения необходимого числа витков фазы для длительного режима

катушечные группы соединяют последовательно и параллельные провода намотки тоже соединяют последовательно.
Возможен и такой вариант: при числе витков секции перемотанного образца wc"=4 и a=4 число витков фазы для кратковременного режима:
т.е. катушечные группы соединяют параллельно в четыре ветви.
Число параллельных проводов при aн=4 равно
и они соединены параллельно.
При этом для получения необходимого числа витков фазы для длительного режима

параллельные провода намотки соединены последовательно, а катушечные группы соединены параллельно (aн=4).
Способ многократного изменения мощности частотно-регулируемого электродвигателя осуществляется следующим образом.
Якорную обмотку 2 с числом витков wн разделяют на k частей, выводы 5 которых подсоединяют к коммутирующему устройству 4. В варианте продолжительного режима работы части якорной обмотки 2 соединяют последовательно с помощью коммутирующего устройства 4, и число витков фазы составляет wн. При подаче напряжения U с частотой fн от преобразователя частоты на якорную обмотку 2 электродвигатель имеет частоту вращения nн и развивает мощность Рн=1,028Мнnн. В варианте кратковременного режима работы части якорной обмотки 2 соединяют параллельно с помощью коммутирующего устройства 4, и число витков фазы составляет  . При подаче напряжения U с частотой kfн от преобразователя частоты на якорную обмотку 2 электродвигатель имеет частоту вращения knн и развивает мощность Р"=1,028Мнknн=kPн. При необходимости получения от электропривода с частотно-регулируемым электродвигателем повышенного в k раз момента M=kMн в коробке передач электропривода может быть предусмотрено переключение на повышенное в k раз передаточное отношение. При этом мощность на выходе электропривода Р"=1,028kMнnн=kPн. Продолжительность включения при кратковременном и повторно-кратковременном режимах работы ограничивается допустимым нагревом, т.е. величиной суммарных потерь электродвигателя.
. При подаче напряжения U с частотой kfн от преобразователя частоты на якорную обмотку 2 электродвигатель имеет частоту вращения knн и развивает мощность Р"=1,028Мнknн=kPн. При необходимости получения от электропривода с частотно-регулируемым электродвигателем повышенного в k раз момента M=kMн в коробке передач электропривода может быть предусмотрено переключение на повышенное в k раз передаточное отношение. При этом мощность на выходе электропривода Р"=1,028kMнnн=kPн. Продолжительность включения при кратковременном и повторно-кратковременном режимах работы ограничивается допустимым нагревом, т.е. величиной суммарных потерь электродвигателя.
Электродвигатель такой конструкции предназначен для работы в устройствах, рабочий цикл которых включает как продолжительный режим, так и кратковременный, с соответствующими значениями мощностей, и требует переключения режимов.
Использование способа многократного изменения мощности, в частности ее увеличения в k раз в кратковременном режиме, позволяет осуществить выбор базового электродвигателя значительно меньшего типоразмера по сравнению с существующими рекомендациями [3]. Типоразмер базового электродвигателя выбирают исходя из величины кратковременно потребной мощности Р", деленной на k. Причем k определяют, как отмечено выше, исходя из длительности включения, ожидаемых потерь и допустимых перегревов. Наличие базового электродвигателя позволяет использовать его узлы с соответствующей доработкой якорной обмотки при изготовлении требуемого частотно-регулируемого электродвигателя. Использование пакета статора, а также ротора базового электродвигателя избавляет от необходимости изготовления технологической оснастки для штамповки листов статора и ротора, для сборки пакета статора, для заливки ротора алюминием, т.е. позволяет уменьшить время и затраты на технологическую подготовку производства. Использование выбранного на таких условиях базового электродвигателя позволяет не только уменьшить размеры и массу частотно-регулируемого электродвигателя с необходимой для кратковременного режима мощностью, но и снизить трудоемкость и стоимость его изготовления.
Таким образом, предложенный способ многократного изменения мощности частотно-регулируемого электродвигателя путем варьирования числа витков фазы электродвигателя, в частности реализованного в предложенной конструкции разделением якорной обмотки на части, при соответствующем изменении частоты напряжения позволяет практически на порядок изменять номинальную мощность одного и того же электродвигателя, а именно увеличить допустимую мощность его при работе в кратковременном режиме. Кроме того, в соответствии с предъявляемыми требованиями уменьшения размеров и массы работающего в кратковременном режиме частотно-регулируемого электродвигателя использование предложенного способа позволяет осуществить выбор базового электродвигателя значительно меньшего типоразмера по сравнению с существующими рекомендациями.
Следовательно, получен заявленный технический результат.
Изобретение может быть реализовано, когда требуется кратковременное увеличение мощности:
- для обеспечения большого динамического момента, в частности для приведения в движение больших инерционных масс (радиолокационные антенны, астрономические приборы большого диаметра и т.п.), а для длительного равномерного движения этих масс требуемый момент значительно меньше;
- в конце движения больших масс для защелкивания какого-либо ограничителя, в частности при закрывании шлюзов, массивных задвижек и т.п.;
- в электростартерах с ограниченными размерами и массой.
Таким способом на предприятии-заявителе ОАО "Электропривод" практически была решена задача разработки электростартера для запуска газотурбинных установок (ГТУ) электростанций с требуемыми размерами и массой в кратковременном режиме. На базе асинхронного двигателя 5А160М4 мощностью 18,5 кВт получен двигатель мощностью 150 кВт при параллельном соединении частей его обмотки (k=6, 6 параллельных проводов, как показано в примере на стр.9). При этом частота напряжения через преобразователь частоты увеличена с 50 до 300 Гц, частота вращения увеличена с 1500 до 9000 об/мин, режим работы кратковременный продолжительностью 6,5 мин. Мощность частотно-регулируемого электродвигателя получилась увеличенной более чем в k раз за счет частичного использования перегрузочного момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Якорь многофазной электрической машины | 2018 |
|
RU2684898C1 |
| ЯКОРЬ МНОГОФАЗНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 1996 |
|
RU2121207C1 |
| Однофазный асинхронный электродвигатель | 1987 |
|
SU1534653A1 |
| Электромеханический преобразователь вентильного электродвигателя | 1989 |
|
SU1700704A1 |
| Вентильный электродвигатель | 1988 |
|
SU1527689A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2006 |
|
RU2321012C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2282299C2 |
| Асинхронный электродвигатель с блоком защиты | 1983 |
|
SU1129701A1 |
| Ротор трехфазного трехскоростного асинхронного электродвигателя | 1978 |
|
SU748692A1 |
Изобретение относится к электротехнике, а именно к электрическим машинам, и может быть использовано в устройствах, работающих в кратковременном или повторно-кратковременном режиме, а также в устройствах, рабочий цикл которых включает как продолжительный, так и кратковременный режим работы. В способе и электродвигателе многократное изменение номинальной мощности частотно-регулируемого электродвигателя осуществляют путем варьирования числа витков фазы электродвигателя. Номинальную частоту напряжения изменяют таким образом, чтобы произведение числа витков фазы на номинальную частоту напряжения оставалось неизменным. Для обеспечения варьирования числа витков фазы якорная обмотка электродвигателя выполнена разделенной на части с одинаковым числом витков с возможностью их соединения или последовательно, или параллельно, или последовательно-параллельно в зависимости от режима работы. В результате на порядок увеличивается допустимая мощность электродвигателя при работе его в кратковременном режиме. Возможен выбор базового электродвигателя значительно меньшего типоразмера по сравнению с существующими рекомендациями, снижается трудоемкость и стоимость изготовления с использованием узлов базового электродвигателя. Изобретения могут быть реализованы, когда требуется кратковременное увеличении мощности или для обеспечения большого динамического момента, в частности для приведения в движение больших инерционных масс, или в конце их движения для защелкивания какого-либо ограничителя, или в электростартерах с ограниченными размерами и массой. 2 н. и 3 з.п. ф-лы, 1 ил.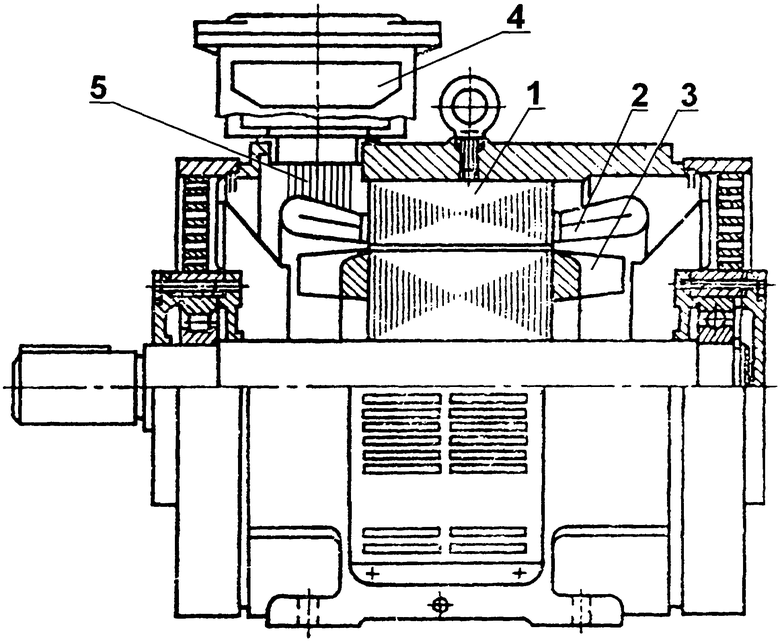
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2030090C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2168842C1 |
| Прибор для стрижки овец | 1926 |
|
SU6387A1 |
| Частотно-параметрический электропривод | 1988 |
|
SU1720135A1 |
| Частотно-регулируемый электропривод для грузоподъемного механизма | 1983 |
|
SU1111244A1 |

