Область техники, к которой относится изобретение
Изобретение относится к области радиолокационной техники, а именно - к способам радиолокационного обнаружения целей в широкой области пространства и может найти применение в обзорных радиолокаторах.
Уровень техники
Известны способы радиолокации целей, предназначенные для использования в обзорных радиолокаторах:
1. Справочник по радиоэлектронным системам. В 2-х томах. Под ред. Б.Х. Кривицкого. - М.: Энергия, 1979.
2. Д. Бартон, Г. Вард. Справочник по радиолокационным измерениям. Пер. с английского под ред. М.М. Вейсбейна. - М.: Советское радио, 1976.
3. Д. Бартон. Радиолокационные системы. Пер. с английского под ред. К.Н. Трофимова. - М.: Воениздат. 1967.
Применительно к способам обзорной радиолокации целей важным техническим показателем является период обзора заданной области пространства, что определяет основной параметр работы средств целеуказания для огневых средств ПВО - работное время средств целеуказания (Справочник офицера противоздушной обороны. Под ред. проф. Г.В. Зимина. - М.: Воениздат, 1978).
Д. Бартон в (Д. Бартон. Радиолокационные системы. Пер. с английского под ред. К.Н. Трофимова. - М.: Воениздат. 1967, рис. 6.1) рассматривает 7 способов обзора пространства обзорного радиолокатора (РЛС), все из которых определяют теоретическое значение периода обзора соотношением:
Тобз = Тобл⋅Фаз⋅Фум/θаз⋅θум
где: Тобл - время облучения цели, складывающееся из времени излучения, времени распространения радиосигнала к цели и обратно и времени накопления сигнала от цели, необходимое для достижения заданного порога ее обнаружения;
Фаз и Фум - требуемые сектора обзора пространства по азимуту и углу места;
θаз и θум - ширина луча антенны РЛС по азимуту и углу места.
Для различных способов обзора пространства реализованные времена обзора отличаются. Для РЛС большой и средней дальности времена обзора составляют 6…20 сек. (например: РЛС 36Д6 - http://www.cons-systems.ru; РЛС «Каста-2Е2» - http://www.roe.ru; РЛС 64Н6Е - http://www.milparade.com).
Для РЛС малой дальности время обзора пространства составляет 2…4 сек. (например РЛС 76Н6Е - http://www.RusArmy.com; РЛС 96Л6Е - «Невский Бастион», 96Л6Е; РЛС 1РЛ123Е - «Техника и вооружение» №№ 6 и 7, 2003 г.)
Время завязки трассы полета цели (определения параметров движения цели), позволяющее сделать вывод о наличии (или отсутствии) цели, рассчитать параметры ее движения, определяется принятым алгоритмом вторичной обработки, обычно определяемым решающим правилом «2 из 3-х» или «3 из 4-х», etc.
В зависимости от реализуемого времени обзора (Тобз) время завязки трассы и передачи информации о целях на огневые средства для их обстрела пропорционально периоду обзора пространства и составляет величину:
- для обеспечения стрельбы ЗРК большой дальности - до 30…40 сек.;
- для обеспечения стрельбы ЗРК малой дальности - до 6…16 сек.
Общим недостатком приведенных аналогов изобретения является значительное работное время средств целеуказания, определяемое временным интервалом завязки трассы полета цели (вторичной обработки информации о цели) и формирования параметров ее движения для целеуказания огневым средствам. В современных условиях такие временные задержки по вторичной обработке информации о цели часто приводят к невозможности своевременного обстрела целей огневыми средствами и прорыва, таким образом, системы обороны.
Известны способы и устройства радиопеленгации источников излучения, предназначенные для использования в системах радиоразведки:
1. Радиопеленгатор РПс3000и - http://irga.sut.ru/ Радиопеленгатор РПс3000и.html;
2. Радиопеленгатор Р-359. Техническое описание. ИИ1.241.017 ТО - http://museum.radioscanner.ru/r_359.html.
3. С.В. Козлов. Пеленгационные антенные системы с пространственной компенсацией помех. Учебно-методическое пособие по специальности 1-39 80 01 «Радиосистемы и радиотехнологии», - Минск, БГУИР, 2019 г.
4. Рембовский А.М., Ашихмин А.В., Козьмин В.А. Радиомониторинг: задачи, методы, средства - М: Горячая линия-Телеком. 2006.
5. Справочник по радиоконтролю. МСЭ 2002. Женева, 2004.
6. Вартанесян В.А. Радиоэлектронная разведка. - М.: Воениздат, 1975.
7. Васин А.А. Пеленгаторные антенные решетки коротковолнового диапазона с высокоточным способом пеленгования. Диссертация на соискание ученой степени кандидата технических наук. - М., МАИ, 2012 г.
8. Алиев Д.С., Иванов А.В. Анализ конструкций современных пеленгаторных антенн. «Воздушно-космические силы. Теория и практика» № 1, март 2017 г.
9. Патент РФ № RU 85 676 U1. Опубликовано: 10.08.2009, Бюл. № 22.
Общими недостатками приведенных аналогов изобретения являются возможность обнаружения только радиоизлучающей цели, значительное время поиска целей по неизвестной заранее частоте излучения, невозможность определения полного вектора координат цели с одной позиции, необходимость одновременной пеленгации цели не менее чем с двух позиций.
В качестве близких аналогов изобретения могут быть рассмотрены отечественная РЛС типа «Волга-А» («Пегматит») П-10 (Лобанов М.М. Развитие советской радиолокационной техники. - М. Воениздат, 1982) и германская РЛС «Лихтенштейн-3» (LiSN-3) (Отчеты особой комиссии по радиолокации. Вып. 6. Совет по радиолокации при СМ СССР. - М. Воениздат. 1946).
Обе РЛС строились на основе системы из 4-х антенн типа «волновой канал» (2 - по горизонтали и 2 - по вертикали). Дальность до цели измерялась по времени задержки ответного сигнала от цели, а точный пеленг на цель определялся фазовым методом с помощью специального гониометра - слухового измерителя разницы фаз ответного сигнала от цели, принятого различными антеннами.
Недостатками близких аналогов изобретения также являются ограниченные размеры ширины диаграммы направленности антенны (для отечественной РЛС типа П-10 - 24°). Обнаружение целей в пределах диаграммы направленности РЛС обеспечивалось без существенных задержек. Однако, обнаружение целей вкруговую обеспечивалось за счет классического способа последовательного обзора пространства путем вращения антенны с темпом 6 об/мин. (1 оборот в 10 сек).
В качестве прототипа изобретения может быть рассмотрен патент РФ № RU 2691129 C1, G01S 13/52 «Радиолокационная станция кругового обзора», опубл. 11.06.2019, Бюл. № 17.
Достижение заявленного в патенте РФ № RU 2691129 C1 технического результата обеспечивается тем, что заявленная в патенте конструкция РЛС кругового обзора содержит разнесенные в пространстве передающее антенно-фидерное устройство (ПРД АФУ) и приемное антенно-фидерное устройство (ПРМ АФУ) метрового диапазона электромагнитных волн, выполненные с независимым электронным сканированием воздушного пространства на передачу и прием.
ПРД АФУ содержит установленные вертикально вокруг оси стационарной невращающейся передающей мачты плоские рефлекторы, между смежными плоскостями которых установлены двухярусные петлевые вибраторы горизонтальной поляризации с центральной запиткой через распределительный фидер.
ПРМ АФУ содержит четыре идентичных яруса скрещенных между собой в горизонтальной плоскости трех полуволновых вибраторов горизонтальной поляризации, размещенных на стационарной вертикальной невращающейся мачте.
Такое выполнение ПРД АФУ и ПРМ АФУ позволяет, по мнению авторов изобретения-прототипа, применить метод фазового измерения азимута воздушных объектов без использования четырех громоздких азимутальных приемных антенн.
Несущие мачты ПРД АФУ и ПРМ АФУ разнесены на местности на расстояние d для защиты его приемных трактов от подавления зондирующим излучением.
РЛС использует два типа зондирующих сигналов:
- короткий τ1 с амплитудной модуляцией (АМ) или с линейно-частотной модуляцией (ЛЧМ) и
- длинный τ2 с ЛЧМ на разных частотах f1 и f2, которые излучаются последовательно во времени.
Недостатками прототипа изобретения являются:
- использование диапазона метровых волн, запрещенного к использованию для радиолокационной службы Регламентом радиосвязи, МСЭ, Женева, 2016 г.;
- существенный (более 50 м) разнос в пространстве передающего и приемного антенно-фидерных устройств, исключающий возможность создания мобильных (самоходных) РЛС;
- поквадрантный обзор пространства (в соответствии с принятым способом устранения неоднозначности фазового измерения азимута воздушных целей и конструкцией передающего антенно-фидерного устройства);
- большой размер «мертвой» зоны ближней границы зоны обнаружения целей, вызванной необходимостью последовательного излучения двух сигналов на двух разных частотах.
Раскрытие сущности изобретения
Сущность предлагаемого способа радиолокации целей основана на всенаправленном по азимуту излучении зондирующего сигнала одновременно по всем целям и всенаправленном по азимуту приеме отраженного от всех целей сигнала.
Синфазное излучение зондирующего сигнала осуществляется изотропной (например, рамочной антенной или вертикальной системой рамочных антенн для увеличения коэффициента направленного действия антенны).
Прием отраженного сигнала от целей осуществляется на две антенны (системы антенн):
- опорный синфазный (изотропный по фазе) сигнал - на изотропную антенну (например, на рамочную антенну или систему рамочных антенн), в том числе используемую для излучения зондирующего сигнала;
- фазометрический (анизотропный по фазе) сигнал - на анизотропную антенну, формирующую вращающееся с частотой сигнала электромагнитное поле (например, турникетную антенну или систему турникетных антенн).
Суммирование опорного сигнала от изотропной (рамочной) антенны и фазометрического от анизотропной (турникетной) антенны на фазовом дискриминаторе и определения, таким образом, разницы фаз сигналов, принятых изотропной и анизотропной антеннами, позволяет определить угловое положение каждого из отраженных от целей сигналов.
Для снижения ближней границы зоны обнаружения целей по дальности используются монохроматический сигнал малой длительности.
Технический результат предлагаемого способа радиолокации достигается в одновременном получении полного объема информации о целях сразу со всех ракурсов возможного нахождения целей по азимуту и углу места. В качестве параметра, определяющего условие решающего правила вторичной обработки, в этом случае выступает период следования зондирующих импульсов, который обычно лежит в пределах единиц миллисекунд.
Таким образом, интервал времени между получением первого отраженного сигнала от цели и получением полного вектора параметров движения цели сокращается более чем в 1000 раз относительно классического способа локации целей обзорного типа и в 4 раза по сравнению со способом локации согласно патенту РФ № RU 2691129 C1.
Краткое описание чертежей (если они содержатся в заявке)
Внешний вид варианта конструкции антенны на опорной конструкции, реализующей заявленный способ локации показан на фиг. 1, где цифрами обозначены: 1 - опорная конструкция; 2 - турникетная антенна из полуволновых вибраторов (директоров); 3 - рамочные антенны.
Схема включения передающей/приемной антенны опорного сигнала приведена на фиг. 2, где цифрами обозначены: 3 - рамочные приемо-передающие антенны; 4 - симметрирующие трансформаторы; 5 - ВЧ сумматоры; 6 - ВЧ разветвители; 7 - фазовращатели; 8 - циркуляторы; 9 - передатчик; 10 - приемник опорного канала.
ВЧ сигнал передатчика 9 через циркуляторы 8, обеспечивающие развязку передающего и приемных каналов, поступает на фазовращатели 7, обеспечивающие отклонение главного максимума диаграммы направленности антенны из рамочных антенн 3. Сигнал передатчика после сдвига фаз фазовращателями 7 поступает на ВЧ разветвители 6 и далее - на ВЧ сумматоры 5. Сигнал от сумматоров 5 поступает на симметрирующие трансформаторы 4 и далее - на рамочные антенны 3, формирующие зондирующий сигнал РЛС в пространстве. Сложная система ВЧ сумматоров и разветвителей необходима для привязки фазового центра рамочных антенн 3 к фазовому центру директорных антенн 11 фазометрического канала.
Схема включения приемной антенны фазометрического канала приведена на фиг. 3, где цифрами обозначены: 4 - симметрирующие трансформаторы; 5 - ВЧ сумматоры; 7 - фазовращатели; 10 - приемник опорного канала; 11 - директорная турникетная антенна; 12 - фазосдвигающая цепочка; 13 - приемник фазового канала; 14 - фазовый дискриминатор.
Отраженный сигнал от цели принимается ортогональными вибраторами директорной турникетной антенны 11. Фазосдвигающая цепочка 12 обеспечивает поворот фазы принятого ортогональными вибраторами антенны 11 сигнала на 90°, что обеспечивает вращение поляризационного базиса электромагнитного поля приемной антенны 11 с частотой сигнала. Сигналы от вертикальной системы директорных антенн 11 через фазовращатели 7, обеспечивающими отклонение главного максимума диаграммы направленности директорной турникетной антенны синхронно с отклонением главного максимума диаграммы направленности передающей рамочной антенны, поступают на ВЧ сумматоры 5 и далее - на приемник фазового канала 13. Принятый приемником 13 отраженный сигнал от целей совместно с опорным сигналом от приемника опорного сигнала 10 поступает на фазовый дискриминатор 14. Результаты измерения фазового сдвига между опорным и фазоизмерительным каналами поступают на дальнейшую обработку.
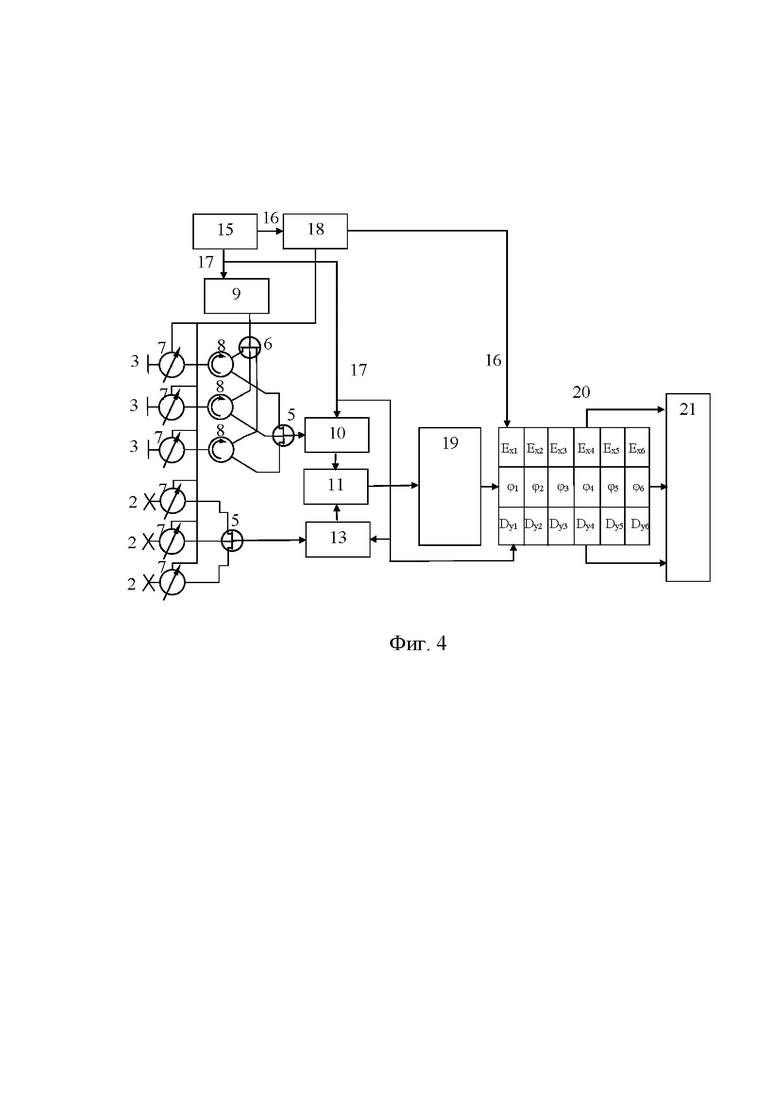
Пример функциональной схемы устройства, реализующего разработанный способ радиолокации в целом, приведена на фиг. 4, где цифрами обозначены: 15 - синхронизатор; 16 - код номера парциальной диаграммы направленности; 17 - синхроимпульсы излучения зондирующих сигналов; 9 - передатчик; 18 - цифровой вычислитель фаз; 6 - ВЧ разветвитель; 8 - циркулятор; 7 - фазовращатель; 3 - приемо-передающая антенна изотропного излучения; 5 - ВЧ сумматор; 2 - директорная турникетная антенна; 10 - приемник опорного канала; 13 - приемник фазового канала; 11 - фазовый дискриминатор; 19 - счетно-решающее устройство вычисления разницы фаз и пересчета в систему пространственных угловых координат; 20 - матрица каналов дальность/угол места; 21 - счетно-решающее устройство отождествления отметок от целей, завязки трасс полета целей и параметров их движения.
Синхронизатор 15 обеспечивает общую синхронизацию работы устройства, формируя последовательность синхроимпульсов, зондирующих импульсов 17 и коды переключения диаграммы направленности антенны по углу места 16 (при необходимости).
Синхроимпульсы излучения зондирующих сигналов 17 поступают на передатчик 9, который формирует зондирующие радиосигналы на заданной частоте излучения. Зондирующие радиосигналы через ВЧ разветвитель 6 поступает на циркуляторы 8 всех передающих рамочных антенн 3 через фазовращатели 7.
По кодам 16, формируемым синхронизатором 15, цифровым вычислителем фаз 18, формируются сигналы управления фазовращателями 7 для переключения угла места излучения РЛС и приема сигналов от целей.
Сигналы от целей принимаются одновременно как рамочными 3, так и турникетными директорными антеннами 2.
Сигналы, принятые рамочными антеннами 3, через фазовращатели 7 и циркуляторы 8, через ВЧ сумматор 5 поступают в приемник опорного канала 10.
Сигналы, принятые турникетными директорными антеннами 2, через фазовращатели 7, через ВЧ сумматор 5 поступают в приемник фазового канала 13.
На приемники опорного канала 10 и фазового канала 13 также поступает последовательность зондирующих импульсов 17 от синхронизатора 15 для запирания входных цепей приемников на время излучения передатчиком 9 зондирующих сигналов.
Сигналы от целей, принятые приемниками опорного 10 и фазового 13 каналов, поступают на фазовый дискриминатор 11, который определяет разницу фаз сигналов, принятых приемниками опорного 10 и фазового 13 каналов.
Разница фаз сигналов, принятых приемниками опорного 10 и фазового 13 каналов, из фазового дискриминатора 11 поступает на счетно-решающее устройство 19, где аналоговая разница фаз переводится в цифровую форму и пересчитывается в систему пространственных угловых координат как азимут цели ϕц.
Измеренный азимут цели ϕц совместно с углом места цели Ец согласно коду 16 цифрового вычислителя фаз 18 и дальности до цели согласно временной задержки принятого сигнала от цели относительно синхроимпульса излучения зондирующего сигнала 17 поступают в матрицу каналов дальность/азимут/угол места 20.
Счетно-решающее устройство отождествления отметок от целей, завязки трасс полета целей и определения параметров их движения 21 проводит вторичную обработку результатов первичного обнаружения целей из матрицы 16 согласно известным критериям: получение n отметок от целей от m запросных сигналов, критерий сброса трассы: k пропусков получения отметок от целей) для дальнейшей передачи завязанных трасс полета обнаруженных целей на огневые средства ПВО.
Осуществление изобретения
Пример осуществления изобретения приведен на фиг. 1…4.
В основу примера конструкции РЛС, реализующей заявленный способ локации целей положена антенная система горизонтальной поляризации, работающая на прием и передачу зондирующих сигналов. Выбор горизонтальной поляризации применительно к примеру заявленного способа локации некритичен и только отражает стремление максимизировать отражение радиоволн от цели за счет развитых аэродинамических поверхностей самолетов, вертолетов и крылатых ракет или выносных консолей двигателей малоразмерных «дронов».
Приемная анизотропная по фазе антенна представляет собой вертикальную линейку полуволновых вибраторов (директоров), включенных по турникетной схеме и размещенных на опорной конструкции через интервалы, равные λ/2.
Передающая изотропная по фазе антенна, одновременно выполняющая функцию приемной антенны опорного сигнала, представляет собой вертикальную линейку рамочных антенн, размещенных на опорной конструкции через интервалы, равные λ/2 со сдвигом относительно полуволновых вибраторов приемной антенны через интервал, равный λ/4, где λ - длина волны излучаемого сигнала.
Определение азимута цели осуществляется по фазовому сдвигу между сигналами, принятыми синфазной (изотропной по фазе) всенаправленной по азимуту и анизотропной по фазе всенаправленной по азимуту антеннами, селекция по дальности сигналов от разных целей осуществляется по временной задержке принятых сигналов относительно излученного зондирующего сигнала
Предложенный способ радиолокации целей инвариантен к выбору длины волны излучаемого сигнала (частотного диапазона работы).
Для исключения основного недостатка прототипа изобретения предлагается использовать частотные диапазоны работы согласно распределению частот, выделенных Регламентом радиосвязи (МСЭ, Женева, 2016 г.) для радиолокационной службы, например: РР5-42, строки 3…5; РР5-54, строки 3…5; РР5-62, строки 4…6; РР5-65, строки 1…2 и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ | 1998 |
|
RU2127437C1 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |



Изобретение относится к области радиолокационной техники, а именно - к способам радиолокационного обнаружения целей в широкой области пространства, и может найти применение в обзорных радиолокаторах. Сущность заявленного способа заключается в том, что способ радиолокации целей для применения в обзорных радиолокаторах, основанный на измерении углов приема отраженных от целей сигналов, отличается тем, что все цели облучаются зондирующими сигналами одновременно с помощью всенаправленной синфазной антенны, отраженные от всех целей сигналы принимаются одновременно на две всенаправленные антенны: на синфазную и анизотропную по фазе антенны, размещенные в одной точке пространства, в процессе приема сигналов от целей определяется фазовый сдвиг между сигналами, принятыми синфазной и анизотропной по фазе антеннами, величина которого соответствует углу приема отраженных от целей сигналов, селекция сигналов от разных целей осуществляется по временной задержке принятых от целей сигналов относительно момента времени излучения зондирующего сигнала. Техническим результатом при реализации заявленного решения является снижение времени завязки трассы полета цели до единиц миллисекунд за счет отказа от сканирования пространства и всенаправленного облучения целей в пространстве зондирующим сигналом и всенаправленного приема отраженного от целей сигнала. 4 ил.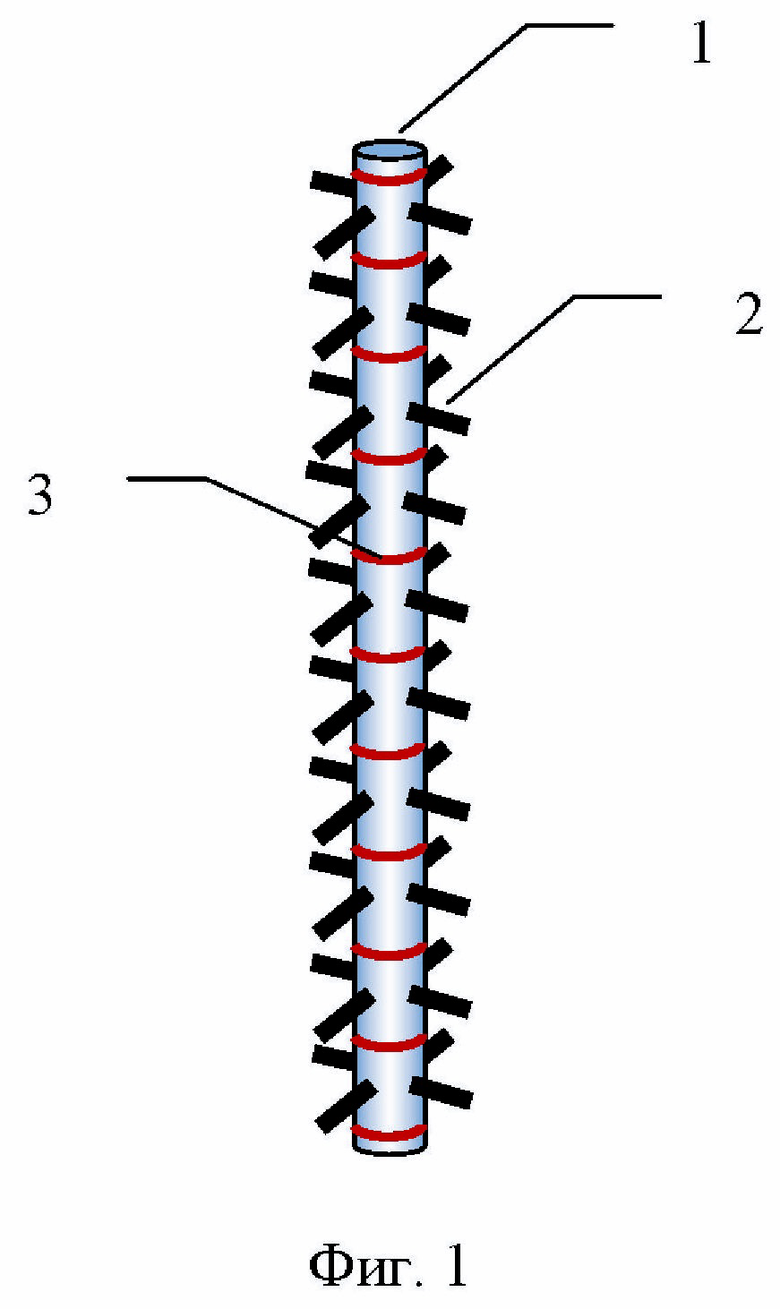
Способ радиолокации целей для применения в обзорных радиолокаторах, основанный на измерении углов приема отраженных от целей сигналов, отличающийся тем, что все цели облучаются зондирующими сигналами одновременно с помощью всенаправленной синфазной антенны, отраженные от всех целей сигналы принимаются одновременно на две всенаправленные антенны: на синфазную и анизотропную по фазе антенны, размещенные в одной точке пространства, в процессе приема сигналов от целей определяется фазовый сдвиг между сигналами, принятыми синфазной и анизотропной по фазе антеннами, величина которого соответствует углу приема отраженных от целей сигналов, селекция сигналов от разных целей осуществляется по временной задержке принятых от целей сигналов относительно момента времени излучения зондирующего сигнала.
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| Способ радиолокационного обзора пространства (варианты) | 2016 |
|
RU2638550C1 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
| US 20140028494 A1, 30.01.2014 | |||
| W O 2001069725 A1, 20.09.2001. | |||

