Изобретение относится к области спутниковой навигации и может быть использовано для определения погрешности аппаратуры спутниковых навигационных сигналов.
Известен способ поверки аппаратуры навигации с помощью комплекса средств измерений [Патент США №5790438, 1998]. В данном способе радионавигационный сигнал формируется с помощью генераторов псевдослучайной последовательности и генератора радиочастоты. Измерение параметров сигнала тестируемой аппаратуры осуществляется частотомером, миливаттметром, анализатором спектра и цифровым преобразователем.
Недостатком данного способа является низкая точность отдельных измерительных приборов, которые не являются эталонными и, следовательно, вносят дополнительную погрешность в измерения и не позволяют использовать данный комплекс для аттестации аппаратуры навигации.
Известен способ измерения погрешностей аппаратуры навигации с помощью комплекса средств измерений, взятый в качестве прототипа (Донченко С.И. Комплекс средств измерений для испытаний аппаратуры потребителей космических навигационных систем ГЛОНАСС и GPS [Электронный ресурс]: / С.И.Донченко, О.В.Денисенко, В.М.Царев, В.П.Волченков // Новости навигации. - 2004. - №2. - Режим доступа: internavigation.ru/documents/2_04.doc. - Имеется печ. аналог). В данном способе поверка спутниковой навигационной аппаратуры проводится путем измерения погрешности определения координат, скорости и синхронизации к координированной шкале времени UTC при помощи эталонных средств. Основу комплекса составляет имитатор навигационных сигналов, с помощью которого формируют сигнал группы спутников (навигационных космических аппаратов) без погрешностей для определения аппаратной погрешности аппаратуры навигации.
Недостатком данного способа является отсутствие поверки точности измерения аппаратурой навигации радионавигационных параметров, в частности времени задержки распространения радиосигнала.
Задачей изобретения является определение погрешности аппаратуры навигации путем определения погрешностей измерения аппаратурой навигации радионавигационного параметра - времени задержки распространения радиосигнала.
Поставленная задача решается тем, что в способе определения погрешности аппаратуры навигации, при котором с помощью имитатора навигационных сигналов формируют сигнал навигационного космического аппарата (НКА) без погрешностей для определения аппаратной погрешности аппаратуры навигации, согласно изобретению имитатором навигационных сигналов устанавливают сигнал с несущей частотой fн, равной несущей частоте имитируемого навигационного космического аппарата, устанавливают дискретные значения задержек сигнала от нуля до  , измеряют разность задержек сигнала имитатора навигационных сигналов и аппаратуры навигации для каждого дискретного значения задержки сигнала, устанавливают дополнительную задержку сигнала с помощью линии задержки, повторно имитатором навигационных сигналов устанавливают дискретные значения задержек сигнала от нуля до , определяют разность задержек для каждого дискретного значения задержки сигнала, и о погрешности аппаратуры навигации судят по разности результатов измерений погрешностей дискретных задержек сигнала при нулевой и дополнительной задержке сигнала, установленной с помощью линии задержки.
, измеряют разность задержек сигнала имитатора навигационных сигналов и аппаратуры навигации для каждого дискретного значения задержки сигнала, устанавливают дополнительную задержку сигнала с помощью линии задержки, повторно имитатором навигационных сигналов устанавливают дискретные значения задержек сигнала от нуля до , определяют разность задержек для каждого дискретного значения задержки сигнала, и о погрешности аппаратуры навигации судят по разности результатов измерений погрешностей дискретных задержек сигнала при нулевой и дополнительной задержке сигнала, установленной с помощью линии задержки.
Существенное отличие предложенного способа от известных заключается в том, что вместо определения погрешностей измерения навигационной аппаратуры путем сравнения известных значений (образцовых) с данными, полученными в результате измерения поверяемой навигационной аппаратуры, в предлагаемом способе производится выделение погрешности аппаратуры навигации из суммарной погрешности измерения при отсутствии образцового средства по определяемому радионавигационному параметру.
Спутниковые радионавигационные системы ГЛОНАСС и GPS базируются на дальномерном и радиально-скоростном методе измерения, основными измеряемыми параметрами которых являются время распространения радиоволн t и доплеровское смещение частоты F∂ (Сетевые спутниковые радионавигационные системы / B.C.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др.; ред. B.C.Шебшаевича. - М.: Радио и связь, 1993. - С.111). Следовательно, чем более точно удается определить время прохождения сигнала от навигационного космического аппарата до потребителя, тем более точно удается определить координаты потребителя.
Определить погрешность задержки распространения радиосигнала можно с помощью эталонного средства. Для аппаратуры навигации таким эталонным средством служит имитатор навигационных сигналов, способный формировать сигналы, имитирующие сигналы системы НКА ГЛОНАСС и GPS в точке их приема аппаратурой навигации. Аппаратура навигации имеет погрешность измерения задержки распространения радиосигнала. Имитатор навигационных сигналов имеет также погрешность формирования задержки сигнала. Если точность формирования задержки сигнала имитатором навигационных сигналов существенно выше точности измерения задержи сигнала аппаратурой навигации, можно провести измерения погрешности аппаратуры навигации с точностью формирования задержки имитатором навигационных сигналов, как это реализовано в прототипе. Высокоточный имитатор навигационных сигналов, как и любое эталонное средство, является дорогостоящей аппаратурой и, в свою очередь, требует аттестации. Поэтому использовать менее точные имитаторы навигационных сигналов для проведения измерений погрешности задержки распространения радиосигнала напрямую затруднительно. Представляется возможным проводить измерения погрешности задержки распространения радиосигнала имитаторами навигационных сигналов с аппаратными погрешностями формирования задержки сигнала, соизмеримыми с погрешностями измерения задержки сигнала аппаратурой навигации путем разделения погрешностей имитатора навигационных сигналов и аппаратуры навигации из суммарной погрешности имитатора навигационных сигналов и аппаратуры навигации.
На чертеже приведена структурная схема устройства, реализующего предложенный способ.
Устройство содержит имитатор 1 навигационных сигналов ГЛОНАСС/GPS, первый выход которого подключен через линию задержки 2 к первому входу аппаратуры 3 навигации. Два других выхода имитатора 1 навигационных сигналов подключены к соответствующим входам аппаратуры 3 навигации.
Способ измерения осуществляется следующим образом. В начале проведения измерений, для того чтобы иметь возможность сравнивать задержки, формируемые имитатором 1 навигационных сигналов, с измеренными задержками аппаратуры 3 навигации следует синхронизировать работу обоих приборов от одного генератора, например, так как показано на фиг.1. Далее на выходе имитатора 1 навигационных сигналов устанавливают частоту навигационного сигнала fн, которая соответствует частоте выбранного НКА. Так для спутниковой радионавигационной системы ГЛОНАСС значения несущих частот НКА располагаются в диапазоне 1598.0625-1615.5 МГц с шагом дискретизации 0.5625 МГц (литеры с -7 по 24). В системе GPS все НКА излучают сигналы с частотой 1575.42 МГц. Имитатором 1 навигационных сигналов устанавливают задержку распространения радиосигнала для первой поверяемой точки. Линией задержки 2 устанавливают исходную (нулевую задержку) на частоте Доплера, равную нулю. С равномерным шагом дискретизации τ∂ имитатором 1 навигационных сигналов последовательно устанавливают дискретные значения задержки для второй, третьей и т.д. до последней поверяемой точки, соответствующие задержке . Аппаратурой 3 навигации в каждой поверяемой точке измеряют значения задержки навигационного сигнала. Таким образом, производят измерение суммарной аппаратной погрешности имитатора 1 навигационных сигналов и аппаратуры 3 навигации:
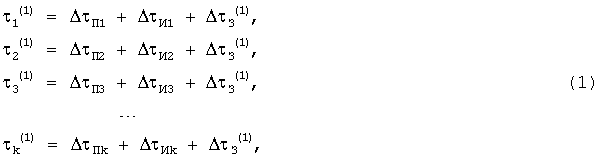
где τ1 (1), τ2 (1), ..., τk (1) - суммарная погрешность имитатора навигационных сигналов и аппаратуры 3 навигации в 1, 2, ..., k-й поверяемой точке для первого цикла измерений (при нулевой задержке);
ΔτП1, ΔτП2, ..., ΔτПk - погрешность, вносимая только аппаратурой 3 навигации в 1, 2, ..., k-й поверяемой точке;
ΔτИ1, ΔτИ2, ..., ΔτИk - погрешность, вносимая только имитатором 1 навигационных сигналов в 1, 2, ..., k-й поверяемой точке;
ΔτЗ (1) - постоянная составляющая суммарной погрешности для первого цикла измерений (при нулевой задержке).
Далее имитатором 1 навигационных сигналов устанавливают задержку навигационного сигнала в первой поверяемой точке. Линией задержки 2 устанавливают дополнительное значение задержки навигационного сигнала
τ=nτ∂,
где 
С равномерным шагом дискретизации τ∂ имитатором 1 навигационных сигналов последовательно устанавливают дискретные значения задержки, равные второй, третьей и т.д., до последней поверяемой точки, соответствующие задержке . Аппаратурой 3 навигации в каждой поверяемой точке производят измерение суммарной аппаратной погрешности имитатора 1 навигационных сигналов и аппаратуры 3 навигации:
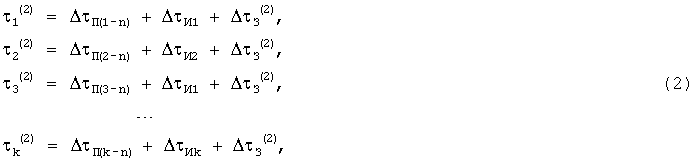
где τ1 (2), τ2 (2), ..., τk (2) - суммарная погрешность имитатора навигационных сигналов и аппаратуры 3 навигации в 1, 2, ..., k-ой точки измерения для второго цикла измерений;
ΔτП(1-n), ΔτП(2-n), ..., ΔτП(k-n) - погрешность аппаратуры 3 навигации в (k-n) точке измерения при введенной дополнительной задержке навигационного сигнала τ=nτ∂ с помощью линии задержки;
ΔτЗ (2) - постоянная составляющая суммарной погрешности для второго цикла измерений.
Системы уравнений (1) и (2) дают возможность определить погрешность аппаратуры 3 навигации во всех поверяемых точках.
Путем почленного вычитания (1) из (2) получим систему уравнений
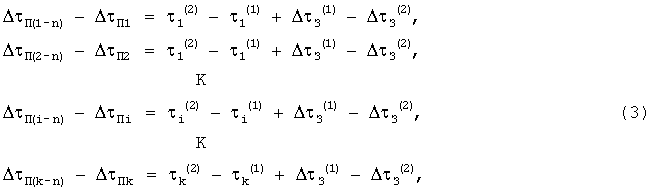
в этой системе уравнений неизвестными являются k погрешностей задержек и ΔτЗ (1), ΔτЗ (2), а члены τ1 (1), τ2 (1), ..., τk (1) и τ1 (2), τ2 (2), ..., τk (2) - известные числа, полученные экспериментально при снятии суммарных погрешностей имитатора 1 навигационных сигналов и аппаратуры 3 навигации.
Система (3) состоит из k уравнений с (k+2) неизвестными, для однозначного ее решения необходимы дополнительные условия. Физически обоснованными можно считать три условия.
1. Погрешности имитатора 1 навигационных сигналов и аппаратуры 3 навигации не меняются при снятии экспериментальных зависимостей для систем (1) и (2), следовательно, сумма левой части системы (3) равна нулю, а неизвестные составляющие суммарной погрешности ΔτЗ (1), ΔτЗ (2) определяются выражением
 .
.
2. Погрешности имитатора 1 навигационных сигналов и аппаратуры 3 навигации приравниваются к нулю в первой точке
ΔτП1=0,
ΔτИ1,=0.
3. Исключается постоянная составляющая погрешностей аппаратуры 3 навигации и имитатора 1 навигационных сигналов
Тогда при n=1, что соответствует τ=τ∂, получается следующее выражение для погрешности аппаратуры 3 навигации в каждой i-ой точке:

где 
По описанной методике проводятся также измерения на частотах Доплера, отличных от нуля.
Первый выход имитатора 1 навигационных сигналов - выход навигационного сигнала, второй выход имитатора 1 навигационных сигналов - выход сигнала синхронизации 10 МГц, третий выход имитатора 1 навигационных сигналов - выход сигнала синхронизации по 1 секунде. Первый вход аппаратуры 3 навигации - антенный вход, второй вход аппаратуры 3 навигации - вход внешней синхронизации 10 МГц, третий вход аппаратуры 3 навигации - вход внешней синхронизации по 1 секунде.
При практическом использовании предлагаемого способа устанавливают fн=1598.0625 МГц. Устанавливают частоту Доплера, равную нулю. Производят измерение суммарной аппаратной погрешности имитатора 1 навигационных сигналов и аппаратуры 3 навигации в 10 точках (k=10). Получают массив измерений задержек распространения радиосигнала в каждой i точке τi (1). Устанавливают задержку распространения радиоволн
Производят измерение суммарной аппаратной погрешности имитатора 1 навигационных сигналов и аппаратуры 3 навигации в 10 точках (k=10). Получают массив измерений задержек распространения радиосигнала в каждой i точке τi (2). По формуле (4) вычисляют значение погрешности задержки распространения радиосигнала в каждой i точке. Производят аналогичные измерения на других частотах fн.
Измеренные экспериментальные данные целесообразно обрабатывать на персональном компьютере.
В качестве имитатора 1 навигационных сигналов может быть использована аппаратура, используемая в прототипе. В качестве аппаратуры 3 навигации может быть использована аппаратура, описанная в (Власов И.В. Точностные характеристики спутниковой навигационной аппаратуры с угломерным каналом / И.Б.Власов, В.Б.Пудловский, С.Н.Тарахнов // Вестник московского государственно технического университета. - 1997. - №1. - С.114-126). Линия 2 задержки может быть реализована на практике, например, на основе измерительной линии Р1-5.
Данный способ позволяет определить погрешность аппаратуры навигации по радионавигационному параметру, а также повысить точность определения погрешности за счет разделения суммарной погрешности аппаратуры навигации и имитатора навигационных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ФОРМИРОВАНИЯ ПСЕВДОДАЛЬНОСТИ НАВИГАЦИОННОГО СИГНАЛА | 2012 |
|
RU2498225C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2618520C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| Способ определения целостности высокоточных навигационных определений в реальном времени | 2017 |
|
RU2644450C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ КОНТРОЛЯ ГЕОМЕТРИИ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2019 |
|
RU2713633C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2001 |
|
RU2215299C2 |
Изобретение относится к области спутниковой навигации и может быть использовано для определения погрешности аппаратуры спутниковых навигационных сигналов. Достигаемый технический результат - определение погрешности аппаратуры навигации при измерении времени задержки распространения радиосигнала. Способ основан на использовании имитатора сигналов навигационного космического аппарата (НКА). Согласно способу имитатор подключают через линию задержки ко входу аппаратуры навигации. Устанавливают нулевое значение задержки линией задержки. Устанавливают с помощью имитатора сигнал с несущей частотой fн, равной несущей частоте имитируемого НКА (этап б). Устанавливают с помощью имитатора дискретные значения задержек сигнала от нуля до  (этап в). Измеряют значения задержек сигнала с помощью аппаратуры навигации (этап г). Определяют погрешности измерений путем определения разности задержек сигналов имитатора и задержек, измеренных аппаратурой навигации (этап д). С помощью линии задержки устанавливают дополнительное значение задержки сигнала и повторяют этапы б)-д). О погрешности аппаратуры навигации судят по разности погрешностей измерений для дискретных значений задержек сигнала при нулевой и дополнительной задержке сигнала. 1 ил.
(этап в). Измеряют значения задержек сигнала с помощью аппаратуры навигации (этап г). Определяют погрешности измерений путем определения разности задержек сигналов имитатора и задержек, измеренных аппаратурой навигации (этап д). С помощью линии задержки устанавливают дополнительное значение задержки сигнала и повторяют этапы б)-д). О погрешности аппаратуры навигации судят по разности погрешностей измерений для дискретных значений задержек сигнала при нулевой и дополнительной задержке сигнала. 1 ил.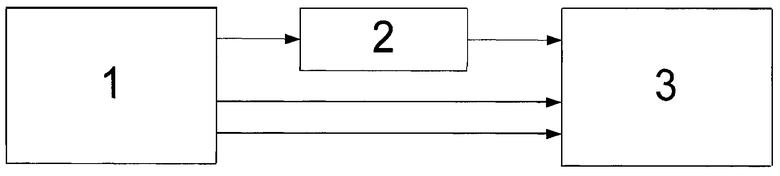
Способ определения погрешности аппаратуры навигации с использованием имитатора сигналов навигационного космического аппарата (НКА), заключающийся в том, что имитатор подключают через линию задержки ко входу аппаратуры навигации и
а) устанавливают нулевое значение задержки линией задержки,
б) устанавливают сигнал с несущей частотой fн, равной несущей частоте имитируемого НКА, с помощью имитатора,
в) устанавливают дискретные значения задержек сигнала от нуля до  с помощью имитатора,
с помощью имитатора,
г) измеряют значения задержек сигнала с помощью аппаратуры навигации,
д) определяют погрешности измерений путем определения разности задержек сигналов имитатора и задержек, измеренных аппаратурой навигации.
е) с помощью линии задержки устанавливают дополнительное значение задержки сигнала и повторяют этапы б)-д),
а о погрешности аппаратуры навигации судят по разности погрешностей измерений для дискретных значений задержек сигнала при нулевой и дополнительной задержке сигнала.
| Донченко С.И | |||
| и др | |||
| Комплекс средств измерений для испытаний аппаратуры потребителей космических навигационных систем ГЛОНАС и GPS | |||
| Новости навигации, 2004, № 2, с.9-12 | |||
| DE 10061988 A1, 18.07.2002 | |||
| JP 2004309307, 04.11.2004 | |||
| Устройство для измерения относительных смещений пород в горных выработках | 1983 |
|
SU1143841A1 |

