Изобретение относится к области машиностроения и может быть применено в приводах автоматических систем управления летательных аппаратов, робототехнических, антенных и других электромеханических силовых системах, в которых масса и габариты имеют важное значение.
Известен привод, состоящий из корпуса, электродвигателя, имеющего статор и закрепленный на валу ротор, двухступенчатой волновой передачи, каждая ступень которой содержит двухдисковый волнообразователь, сепаратор с размещенными в нем в несколько рядов телами качения, и жесткое колесо, при этом жесткое колесо первой ступени является составной частью дискового волнообразователя выходной ступени, жесткое колесо выходной ступени является выходным валом силового мини-привода, сепараторы первой и выходной ступеней волновой передачи жестко связаны с корпусом, а ротор и статор электродвигателя, вал ротора электродвигателя, жесткие колеса, сепараторы обеих ступеней волновой передачи расположены концентрически относительно центральной оси силового мини-привода (патент РФ №2281597 - прототип).
Недостатком прототипа является небольшое осевое расстояние между телами качения, что не позволяет нагружать выходной вал большими значениями изгибающего момента (перерезывающей силы) и увеличивает внешний диаметр силового мини-привода. Недостатком прототипа является также отсутствие в его составе датчика положения выходного вала, датчика положения ротора электродвигателя и стопорного устройства, что вынуждает использовать внешние датчики и стопорное устройство, чем увеличивает габариты исполнительного механизма в целом.
Цель изобретения - создание силового мини-привода с возможностью использования в широком диапазоне изгибающих моментов, действующих на выходной вал при наименьших габаритах, и расширение функциональных возможностей.
Цель изобретения достигается тем, что силовой мини-привод, состоящий из корпуса, электродвигателя, имеющего статор и закрепленный на валу ротор, двухступенчатой волновой передачи, каждая ступень которой содержит двухдисковый волнообразователь, сепаратор с размещенными в нем в несколько рядов телами качения, и жесткое колесо, при этом жесткое колесо первой ступени является составной частью дискового волнообразователя выходной ступени, жесткое колесо выходной ступени является выходным валом силового мини-привода, сепараторы первой и выходной ступеней волновой передачи жестко связаны с корпусом, а ротор и статор электродвигателя, вал ротора электродвигателя, жесткие колеса, сепараторы обеих ступеней волновой передачи расположены концентрически и вдоль центральной оси силового мини-привода, при этом выходной вал силового мини-привода с жестким колесом выходной ступени волновой передачи выполнен в виде полого цилиндра с торцевой крышкой, на которой размещены элементы крепления к объекту регулирования, опирается на тела качения, расположенные с обеих сторон электродвигателя, тела качения, расположенные со стороны торцевой крышки, образуют радиальный подшипник, а с противоположной стороны являются телами качения выходной ступени волновой передачи, при этом тела качения расположены на диаметрах, близких к наружному диаметру статора электродвигателя, вал ротора электродвигателя выполнен в виде тонкостенного стакана, дно которого жестко соединено с входным валом первой ступени волновой передачи, расположенной внутри ротора электродвигателя, дополнительно внутри радиального подшипника, образованного телами качения, расположенными со стороны торцевой крышки, размещено стопорное устройство, статор которого с двумя парами постоянных магнитов и обмоток жестко соединен с корпусом, а якорь через стопорный элемент кинематически связан с валом ротора электродвигателя, между стопорным устройством и электродвигателем расположен датчик положения ротора электродвигателя, ротор которого жестко соединен с валом ротора электродвигателя, кроме того, со стороны выходной ступени волновой передачи размещен датчик положения выходного вала, так что его статор крепится к сепаратору, а ротор - к наружной стороне жесткого колеса выходной ступени волновой передачи.
На фиг.1 изображен продольный разрез силового мини-привода.
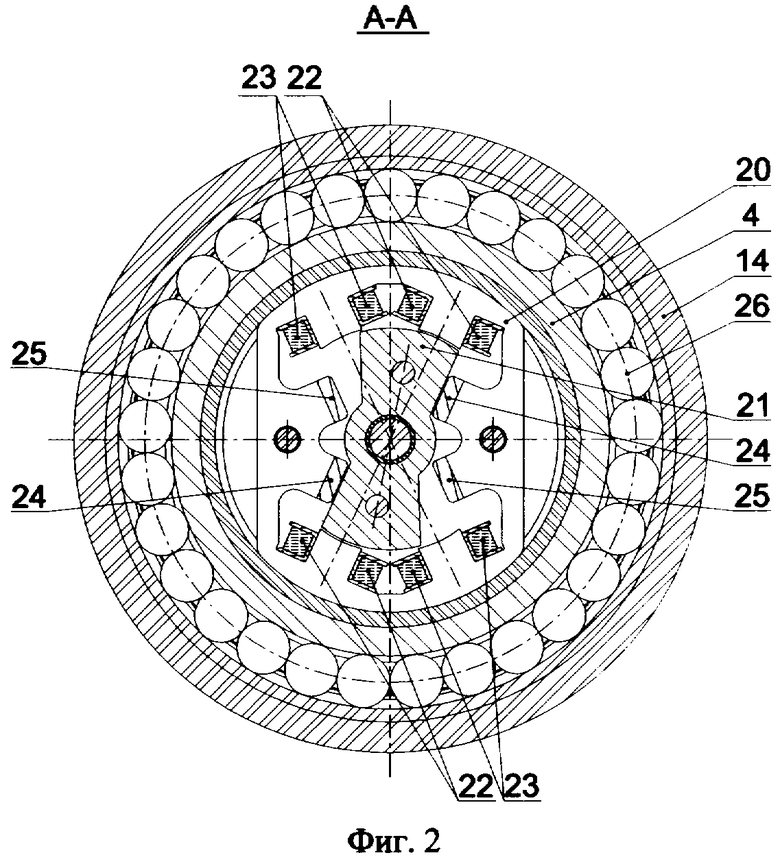
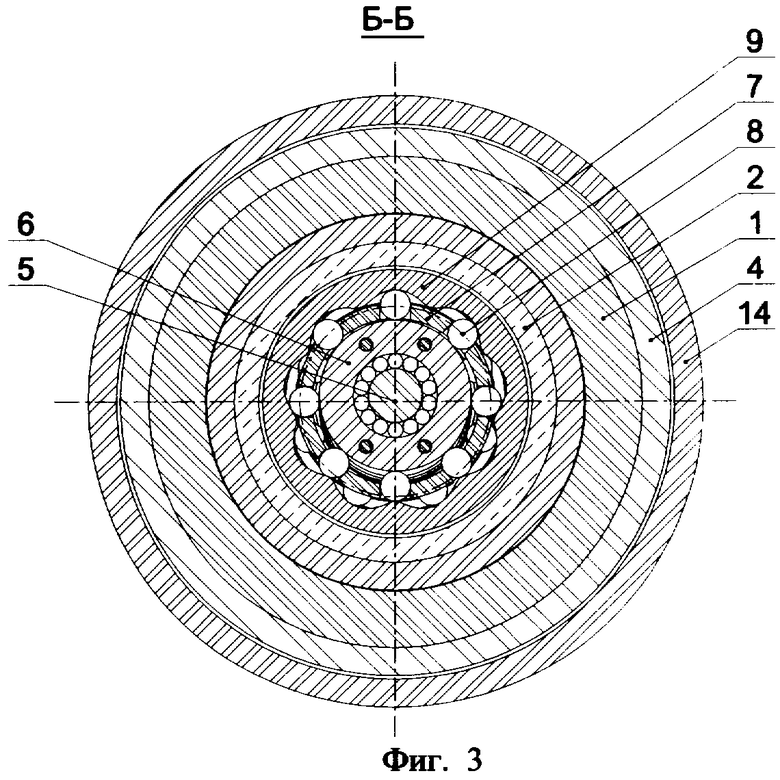
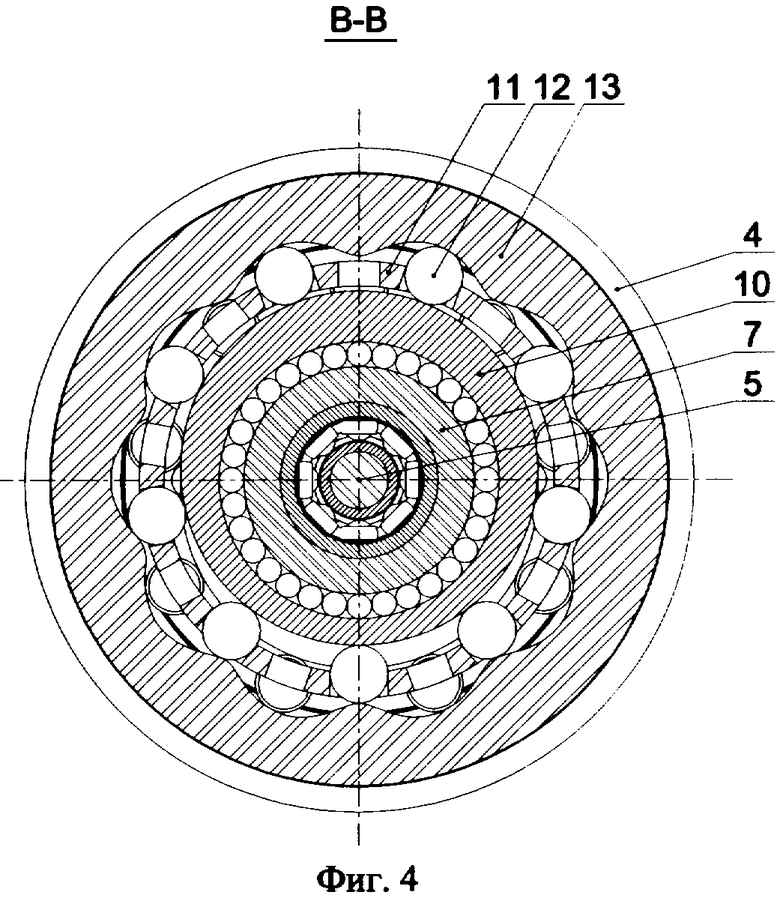
На фиг.2-4 изображены поперечные сечения силового мини-привода.
Силовой мини-привод состоит из электрического двигателя, двухступенчатой волновой передачи, стопорного устройства, датчика положения ротора электродвигателя, датчика положения выходного вала, корпуса и опорного устройства, выполненных концентрично и вдоль центральной оси силового мини-привода.
Электродвигатель содержит статор 1 и ротор 2, закрепленный на валу 3, выполненном в виде тонкостенного стакана. Статор электродвигателя 1 крепится в корпусе 4.
Первая ступень волновой передачи содержит входной вал 5, диски волнообразователя 6, сепаратор 7 с размещенными в нем телами качения 8 и жесткое колесо 9. Входной вал первой ступени волновой передачи 5 жестко соединен с валом 3 ротора электродвигателя и имеет две эксцентриковые поверхности, на которых закреплены диски волнообразователя 6. Оси дисков волнообразователя 6 смещены относительно центральной оси силового мини-привода на одинаковую величину, расположены по разные стороны относительно нее, параллельны ей и лежат с ней в одной плоскости. Сепаратор 7 имеет несколько рядов гнезд для тел качения 8, причем в каждом ряду число гнезд одинаковое. Ряды гнезд, тела качения которых контактируют с разными дисками волнообразователя 6, смещены в окружном направлении относительно друг друга на угол, равный половине углового шага гнезд в одном ряду. Жесткое колесо 9 имеет с внутренней стороны периодическую профилированную поверхность, число периодов которой на единицу превышает число тел качения 8 в одном ряду сепаратора 7. Все тела качения 8 постоянно контактируют с гнездами сепаратора 7, дисками волнообразователя 6 и профилированной поверхностью жесткого колеса 9.
Выходная ступень волновой передачи содержит волнообразователь 10, сепаратор 11 с размещенными в нем телами качения 12 и жесткое колесо 13, являющееся выходным валом силового мини-привода. Волнообразователь 10 представляет собой две цилиндрические эксцентриковые поверхности, выполненные на внешней стороне жесткого колеса 9 первой ступени волновой передачи, так что оси этих поверхностей смещены относительно центральной оси силового мини-привода на одинаковую величину, расположены по разные стороны относительно нее, параллельны ей и лежат с ней в одной плоскости. Сепаратор 11 имеет несколько рядов гнезд для тел качения 12, причем в каждом ряду число гнезд одинаковое. Ряды гнезд, тела качения которых контактируют с разными эксцентриковыми цилиндрическими поверхностями, смещены в окружном направлении относительно друг друга на угол, равный половине углового шага гнезд в одном ряду. Жесткое колесо 13 имеет с внутренней стороны периодическую профилированную поверхность, число периодов которой на единицу превышает число тел качения 12 в одном ряду сепаратора 11. Все тела качения 12 постоянно контактируют с гнездами сепаратора 11, эксцентриковыми цилиндрическими поверхностями волнообразователя 10 и профилированной поверхностью жесткого колеса 13.
Жесткое колесо 13 выходной ступени волновой передачи содержит полый цилиндр 14, к которому крепится торцевая крышка 15, имеющая элементы крепления к объекту регулирования. Сепаратор 11 крепится к сепаратору 7 и корпусу 4 и имеет элементы крепления к неподвижному основанию.
Датчик положения ротора электродвигателя содержит статор 16 с обмотками, закрепленный в корпусе 4, и ротор 17, жестко соединенный с валом 3 ротора электродвигателя.
Датчик положения выходного вала содержит статор 18 с обмотками, закрепленный на сепараторе 11, и ротор 19, жестко присоединенный к внешней стороне жесткого колеса 13.
Стопорное устройство содержит статор 20, закрепленный в корпусе 4, и якорь 21, кинематически связанный со стопорным элементом, который кинематически связан с валом 3 ротора электродвигателя. Статор 20 имеет две пары обмоток 22 и 23 и две пары постоянных магнитов 24 и 25.
Опорное устройство выходного вала имеет два ряда тел качения, расположенных вблизи торцов силового мини-привода: опорное устройство выходного вала разделено на две части, одна из которых в виде тел качения силового подшипника расположена у торца силового мини-привода со стороны выходного вала, а другая в виде тел качения выходной ступени волновой передачи - у противоположного торца, со стороны торцевой крышки 15 между полым цилиндром 14 и корпусом 4 ряд тел качения 26, и со стороны выходной ступени волновой передачи между жестким колесом 13 и волнообразователем 10 ряд тел качения 12 выходной ступени волновой передачи.
Силовой мини-привод работает следующим образом. При включении силового мини-привода подается напряжение на пару обмоток 23 статора стопорного устройства, якорь 21 поворачивается, разрывая кинематическую связь стопорящего элемента с валом 3 ротора электродвигателя. Якорь 21 фиксируется в этом положении постоянными магнитами 25 после снятия напряжения с обмоток 23.
При подаче напряжения на обмотки статора электродвигателя 1 приводится в движение ротор электродвигателя 2, вал 3 ротора электродвигателя и соединенный с ним входной вал 5 первой ступени волновой передачи. Напряжение сигнальной обмотки датчика положения ротора электродвигателя содержит информацию об угле поворота ротора электродвигателя 3.
При этом закрепленные на входном валу 5 диски волнообразователя 6 совершают движение, при котором оси дисков волнообразователя 6 за один оборот входного вала 5 совершают полный оборот вокруг центральной оси силового мини-привода. Сепаратор 7 позволяет телам качения 8 перемещаться только в радиальном направлении, таким образом тела качения 8 под воздействием движения дисков волнообразователя 6 совершают волнообразные движения с периодом, равным периоду одного оборота входного вала 5, и амплитудой, равной расстоянию между центральной осью силового мини-привода и осью диска волнообразователя 6. Тела качения 8, взаимодействуя с профилированной поверхностью жесткого колеса 9, поворачивают его на угол, меньший угла поворота входного вала 5 в число раз, равное числу периодов профилированной поверхности жесткого колеса 9.
При этом цилиндрические эксцентриковые поверхности волнообразователя 10, выполненные на внешней стороне жесткого колеса 9, совершают движение, при котором оси цилиндрических эксцентриковых поверхностей за один оборот волнообразователя 10 совершают полный оборот вокруг центральной оси силового мини-привода. Сепаратор 11 позволяет телам качения 12 перемещаться только в радиальном направлении, таким образом тела качения 12 под воздействием движения цилиндрических эксцентриковых поверхностей волнообразователя 10 совершают волнообразные движения с периодом, равным периоду одного оборота волнообразователя 10, и амплитудой, равной расстоянию между центральной осью силового мини-привода и осью цилиндрической эксцентриковой поверхности. Тела качения 12, взаимодействуя с профилированной поверхностью жесткого колеса 13, поворачивают его на угол, меньший угла поворота волнообразователя 10 в число раз, равное числу периодов профилированной поверхности жесткого колеса 13.
Вместе с жестким колесом 13 поворачивается полый цилиндр 14 и торцевая крышка 15 с закрепленным на ней объектом регулирования. Напряжение сигнальной обмотки датчика положения выходного вала содержит информацию об угле поворота жесткого колеса 13.
Таким образом, отношение угла поворота вала 3 ротора электродвигателя к углу поворота выходного вала силового мини-привода равно произведению чисел периодов профилированных поверхностей жестких колес 9 и 13.
При этом радиальную нагрузку на выходной вал силового мини-привода удерживают тела качения 26 и 12.
При отключении силового мини-привода подается напряжение на пару обмоток 22 статора стопорного устройства, якорь 21 поворачивается в исходное положение, обеспечивая кинематическую связь стопорящего элемента с валом 3 ротора электродвигателя. Якорь 21 фиксируется в исходном положении постоянными магнитами 24 после снятия напряжения с обмоток 22.
Таким образом, выполнение выходного вала силового мини-привода с жестким колесом выходной ступени волновой передачи в виде полого цилиндра с торцевой крышкой, опирающегося на тела качения, расположенные с обеих сторон электродвигателя, так что одни из них образуют радиальный подшипник, а другие являются телами качения выходной ступени волновой передачи, позволило реализовать силовой мини-привод с наружным диаметром, соизмеримым с диаметром электродвигателя. При этом расстояние между рядами тел качения позволяет использовать силовой мини-привод в широком диапазоне значений изгибающего момента, действующего на выходной вал, с наименьшими габаритами. Размещение стопорного устройства, датчика положения ротора электродвигателя и датчика положения выходного вала указанным образом позволило расширить функциональные возможности с наименьшими радиальными и осевыми размерами силового мини-привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО ПРИВОДА | 2004 |
|
RU2265553C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| СИЛОВОЙ МИНИ-ПРИВОД ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2406884C1 |
| ВОЛНОВОЙ РЕДУКТОР С ЭКСЦЕНТРИКОВЫМИ РОЛИКАМИ | 2012 |
|
RU2491455C1 |
| МУЛЬТИПЛИКАТОР ВЫСОКОМОЩНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2015 |
|
RU2588351C1 |
Изобретение относится к области электротехники и машиностроения и может быть использовано в приводах автоматических систем управления летательных аппаратов, робототехнических, антенных и других электромеханических силовых системах, в которых масса и габариты имеют большое значение. Технический результат - обеспечение возможности использования в широком диапазоне изгибающих моментов, действующих на выходной вал, при наименьших габаритах и расширении функциональных возможностей. Сущность изобретения состоит в том, что в силовом мини-приводе, который состоит из электрического двигателя, двухступенчатой волновой передачи, стопорного устройства, датчика положения ротора электродвигателя, датчика положения выходного вала, корпуса и опорного устройства, выполненных концентрично и вдоль центральной оси силового мини-привода, согласно данному изобретению выходной вал силового мини-привода с жестким колесом (13) выходной ступени волновой передачи выполнен в виде полого цилиндра (14) с торцевой крышкой (15), на которой размещены элементы крепления к объекту регулирования. Выходной вал (13) опирается на тела качения, расположенные с обеих сторон электродвигателя. Тела качения (26), расположенные со стороны торцевой крышки (15), образуют радиальный подшипник, а с противоположной стороны - являются телами качения (12) выходной ступени волновой передачи. При этом тела качения расположены на диаметрах, близких к наружному диаметру статора (1) электродвигателя. Внутри радиального подшипника, образованного телами качения (26), расположено стопорное устройство. Между стопорным устройством и электродвигателем расположен датчик положения ротора электродвигателя. Кроме того, со стороны выходной ступени волновой передачи размещен датчик положения выходного вала так, что его статор (18) крепится к сепаратору (11), а ротор (19) - к наружной стороне жесткого колеса (13) выходной ступени волновой передачи. 4 ил.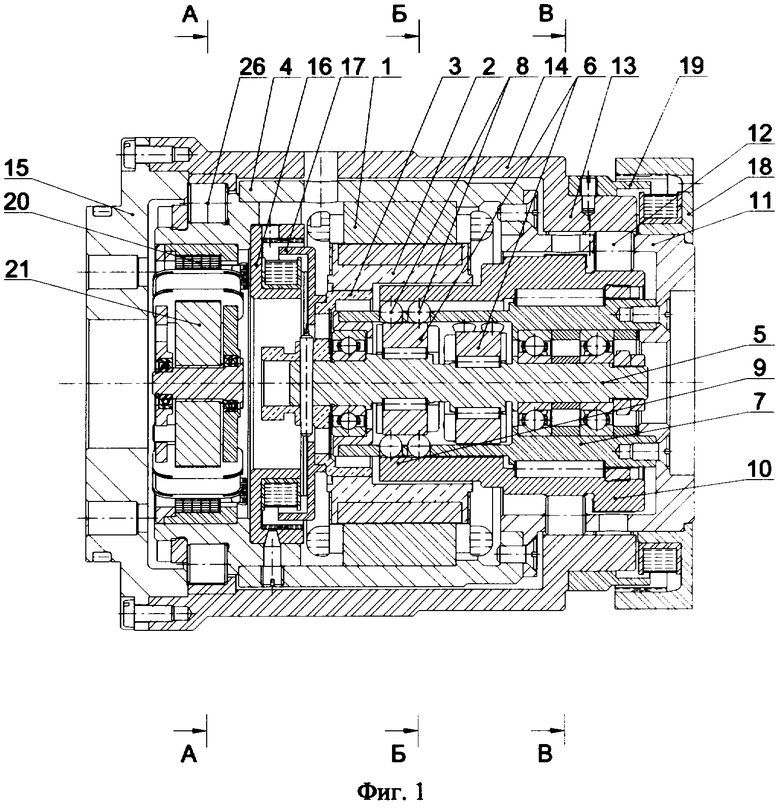
Силовой мини-привод, состоящий из корпуса, электродвигателя, имеющего статор и закрепленный на валу ротор, двухступенчатой волновой передачи, каждая ступень которой содержит двухдисковый волнообразователь, сепаратор с размещенными в нем в несколько рядов телами качения и жесткое колесо, при этом жесткое колесо первой ступени является составной частью дискового волнообразователя выходной ступени, жесткое колесо выходной ступени является выходным валом силового мини-привода, сепараторы первой и выходной ступеней волновой передачи жестко связаны с корпусом, а ротор и статор электродвигателя, вал ротора электродвигателя, жесткие колеса, сепараторы обеих ступеней волновой передачи расположены концентрически относительно центральной оси силового мини-привода, отличающийся тем, что выходной вал силового мини-привода с жестким колесом выходной ступени волновой передачи выполнен в виде полого цилиндра с торцевой крышкой, на которой размещены элементы крепления к объекту регулирования, опирается на тела качения, расположенные с обеих сторон электродвигателя, тела качения, расположенные со стороны торцевой крышки, образуют радиальный подшипник, а с противоположной стороны являются телами качения выходной ступени волновой передачи, при этом тела качения расположены на диаметрах, близких к наружному диаметру статора электродвигателя, вал ротора электродвигателя выполнен в виде тонкостенного стакана, дно которого жестко соединено с входным валом первой ступени волновой передачи, расположенной внутри ротора электродвигателя, дополнительно внутри радиального подшипника, образованного телами качения, расположенными со стороны торцевой крышки, размещено стопорное устройство, статор которого с двумя парами постоянных магнитов и обмоток жестко соединен с корпусом, а якорь через стопорный элемент кинематически связан с валом ротора электродвигателя, между стопорным устройством и электродвигателем расположен датчик положения ротора электродвигателя, ротор которого жестко соединен с валом ротора электродвигателя, кроме того, со стороны выходной ступени волновой передачи размещен датчик положения выходного вала так, что его статор крепится к сепаратору, а ротор к наружной стороне жесткого колеса выходной ступени волновой передачи.
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2252347C2 |
| ВОЛНОВОЙ ПРИВОД И СПОСОБ ЕГО СБОРКИ (ВАРИАНТЫ) | 1999 |
|
RU2165044C1 |
| Электропривод | 1976 |
|
SU663028A1 |
| US 5901801 A, 11.05.1999 | |||
| Механизм свободного хода | 1978 |
|
SU697759A1 |

