Изобретение относится к области рулевых приводов аэродинамических поверхностей беспилотных летательных аппаратов и может быть использовано при создании новых и модернизации существующих летательных аппаратов.
Наиболее близким к предлагаемому изобретению является исполнительный механизм рулевого привода, содержащий корпус, закрепленный в общем блоке рулевых приводов, электродвигатель, волновую передачу, содержащую волнообразователь, гибкое колесо, волновую муфту, жесткое колесо, являющееся составной частью выходного вала, датчик положения, опорное устройство выходного вала (Патент РФ N 2102282 - прототип).
Недостатком прототипа является большая масса и габариты, нежесткая связь выходного вала с датчиком положения, низкий коэффициент полезного действия.
Целью предлагаемого изобретения является уменьшение массогабаритных показателей, увеличение точности канала обратной связи за счет непосредственного соединения датчика положения рулевой поверхности с выходным валом, повышение кпд.
Цель достигается за счет того, что в исполнительном механизме рулевого привода содержащем корпус, который закреплен в общем блоке рулевых приводов, электродвигатель, вал которого соединен с конической шестерней первой ступени трехступенчатого редуктора, третья ступень которого выполнена в виде волновой передачи, содержащей волнообразователь, гибкое колесо, волновую муфту, соединенную с корпусом, и жесткое колесо, которое представляет собой составную часть выходного вала, связанного с валом датчика положения, опорное устройство выходного вала, вторая ступень трехступенчатого редуктора выполнена волновой и расположена соосно с волновой передачей третьей ступени, коническим колесом первой ступени и датчиком положения, который расположен внутри второй и третьей ступеней трехступенчатого редуктора, а вал датчика положения жестко соединен с выходным валом, при этом в волновых передачах второй и третьей ступени волновые муфты выполнены в виде колец-сепараторов с продольными лунками, расположенными равномерно по окружности по наружной цилиндрической поверхности у второй ступени трехступенчатого редуктора и по внутренней цилиндрической поверхности у третьей ступени, при этом к кольцу-сепаратору второй ступени жестко крепится корпус датчика положения, гибкие колеса волновых передач выполнены в виде шариков, расположенных в продольных лунках колец-сепараторов, волнообразователь волновой передачи второй ступени жестко соединен с коническим колесом первой ступени и выполнен в виде кольца, имеющего на пересечении внутренней цилиндрической и обращенной к выходному валу торцевой поверхностей замкнутую косую канавку, жесткое колесо второй ступени и волнообразователь третьей ступени выполнены в виде одного кольца, у которого на пересечении внутренней цилиндрической и обращенной к коническому колесу торцевой поверхностей выполнены профилированные выемки в форме эпициклоиды, а на пересечении наружной цилиндрической и обращенной к выходному валу торцевой поверхностей выполнена замкнутая косая канавка, жесткое колесо третьей ступени выполнено в виде диска, являющегося частью выходного вала, причем на пересечении цилиндрической и обращенной к второй ступени торцевой поверхностей диска выполнены профилированные выемки в форме эпициклоиды, опорное устройство выходного вала состоит из шариков третьей ступени редуктора и двух бронзовых колец, закрепленных на кольцах-сепараторах и имеющих профилированный выступ, контактирующий у одного кольца с наружной торцевой поверхностью волнообразователя первой ступени, у второго с наружной торцевой поверхностью диска выходного вала.
На фиг.1 представлен продольный разрез рулевого привода.
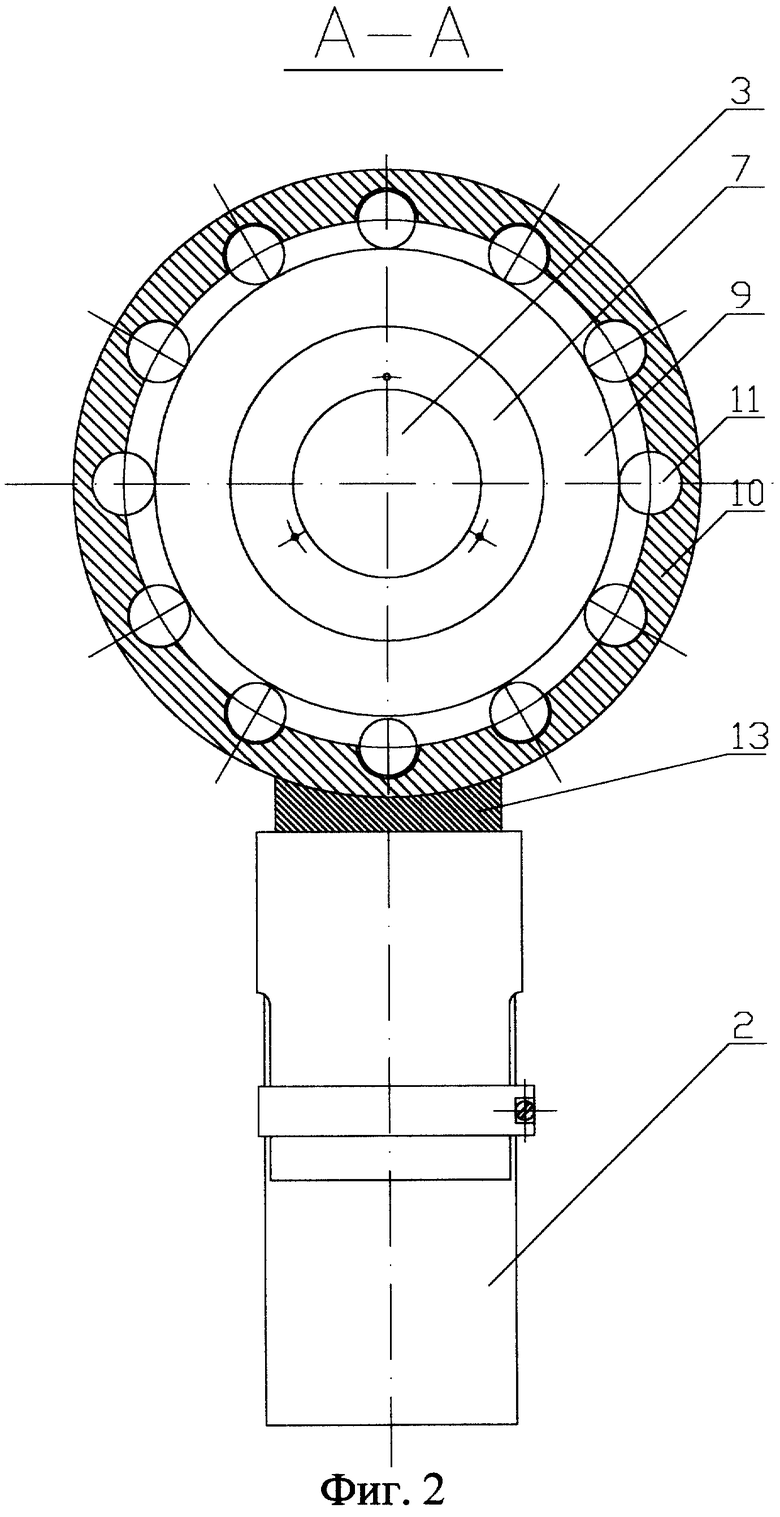
На фиг.2 представлен поперечный разрез А-А третьей ступени редуктора.
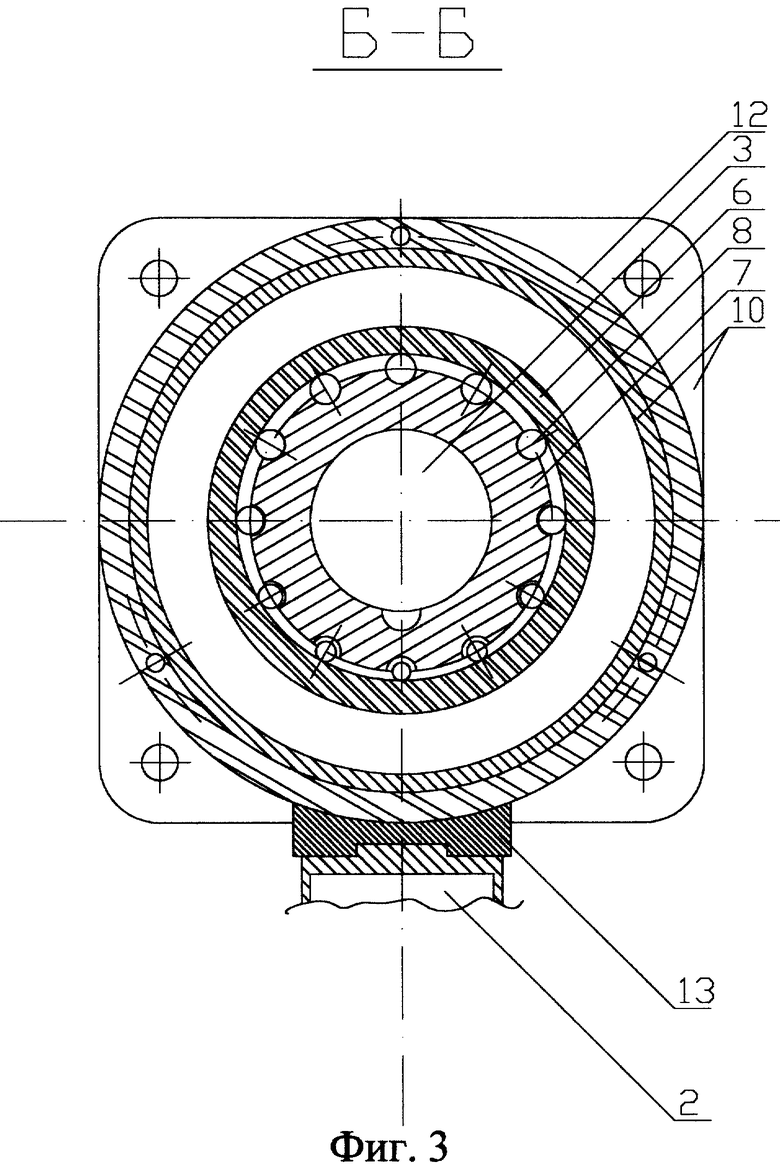
На фиг.3 представлен поперечный разрез Б-Б второй ступени редуктора.
Исполнительный механизм рулевого привода состоит из корпуса, выходного вала 1, электродвигателя 2, датчика положения 3 и трехступенчатого редуктора.
На валу электродвигателя 2 закреплена коническая шестерня 4 первой ступени редуктора, находящаяся в зацеплении с коническим зубчатым колесом 5, неподвижно закрепленным на волнообразователе 6 волновой передачи второй ступени. Колеса конической пары 4 и 5 выполнены с разным числом зубьев.
Волновая передача второй ступени редуктора выполнена по одноволновой схеме, состоит из волнообразователя 6, волновой муфты, выполненной в виде кольца-сепаратора 7, гибкого колеса, выполненного в виде цепочки тел качения (шариков) 8, и жесткого колеса 9 второй ступени редуктора.
Волнообразователь 6, кольцо-сепаратор 7 и жесткое колесо 9 второй ступени редуктора представляют собой стальные кольца, причем у волнообразователя 6 на пересечении внутренней цилиндрической и обращенной к жесткому колесу 9 торцевой поверхностей имеется замкнутая косая канавка, а жесткое колесо 9 на пересечении обращенной к волнообразователю 6 торцевой и внутренней цилиндрической поверхностей имеет профилированные выемки в форме эпициклоиды с числом периодов, равным передаточному числу второй ступени редуктора. Внутренний диаметр волнообразователя 6 совпадает с внутренним диаметром жесткого колеса 9. Кольцо-сепаратор 7 на внешней цилиндрической поверхности имеет канавки в количестве, равном числу шариков 8. Количество шариков 8 на единицу меньше передаточного числа второй ступени.
Волновая передача третьей ступени редуктора выполнена по одноволновой схеме, состоит из волнообразователя, которым является жесткое колесо 9 второй ступени, волновой муфты, выполненной в виде кольца-сепаратора 10, гибкого колеса, выполненного в виде цепочки тел качения (шариков) 11, и жесткого колеса, которым является диск выходного вала 1.
Жесткое колесо 9 второй ступени редуктора является также волнообразователем третьей ступени редуктора, для чего на пересечении внешней цилиндрической и обращенной к выходному валу 1 торцевой поверхностей имеет замкнутую косую канавку. Диаметр диска выходного вала 1 совпадает с внешним диаметром жесткого колеса 9. На пересечении цилиндрической и обращенной к редуктору торцевой поверхностей диска выходного вала 1 выполнены профилированные выемки в форме эпициклоиды с числом периодов, равным передаточному числу третьей ступени редуктора, что позволяет диску выходного вала 1 являться жестким колесом третьей ступени редуктора. Кольцо-сепаратор 10 выполнен в виде кольца и имеет на внутренней цилиндрической поверхности канавки в количестве, равном числу шариков 11. Количество шариков 11 на единицу меньше передаточного числа третьей ступени.
Корпус привода состоит из крышки 12, сопряженной центрирующими поверхностями с кольцом-сепаратором 10 третьей ступени и с кольцом-сепаратором 7 второй ступени редуктора и крепящейся к ним винтами. Таким образом, кольца-сепараторы 7 второй и 10 третьей ступеней редуктора являются неподвижными частями рулевого привода, кроме того, кольцо-сепаратор 10 является частью корпуса, а к кольцу-сепаратору 7 крепится корпус датчика положения 3. Вал датчика 3 положения рулевой поверхности соединен непосредственно с выходным валом 1.
Перпендикулярно к оси крышки 12 на угольнике 13 крепится электродвигатель 2. Для замыкания размерных цепей выходного вала 1 и волнообразователя 6 к кольцам-сепараторам соответственно третьей и второй ступеней редуктора закреплены соответственно удерживающие бронзовые кольца 14 и 15, имеющие профилированный выступ, контактирующий у кольца 15 с наружной торцевой поверхностью волнообразователя первой ступени, у кольца 14 с наружной торцевой поверхностью диска выходного вала 1.
Зубчатое колесо 5 конической пары, волнообразователь 6, жесткое колесо 9 второй ступени, выходной вал 1 и датчик положения 3 расположены соосно. Кроме того, кольцо-сепаратор 10 и шарики 11 третьей ступени редуктора вместе с бронзовыми кольцами 14 и 15 выполняет функцию опорного устройства выходного вала 1.
Рулевой привод работает следующим образом.
При подаче управляющего сигнала на электрический двигатель 2 его вал начинает вращаться и передает крутящий момент через коническую пару 4-5 на волнообразователь 6 волновой передачи второй ступени редуктора, угловая скорость которого меньше угловой скорости вала электродвигателя 2 в величину, равную передаточному числу первой ступени редуктора. Волнообразователь 6 передает движение на шарики 8. Шарики 8 перемещаются вдоль лунок кольца-сепаратора 7 и контактируют с профилированными выемками жесткого колеса 9 так, что половина шариков 8 всегда находится в зацеплении с жестким колесом 9 и передают на него вращение. Угловая скорость жесткого колеса 9 меньше угловой скорости волнообразователя 6 в величину, равную передаточному числу второй ступени редуктора. Жесткое колесо 9, вращаясь, воздействует замкнутой косой канавкой на шарики 11, заставляет их перемещаться вдоль лунок кольца-сепаратора 10. Шарики 11, перемещаясь, воздействуют на профилированные выемки диска выходного вала 1, передавая ему вращение. Угловая скорость выходного вала 1 меньше угловой скорости жесткого колеса 9 в величину, равную передаточному числу третьей ступени редуктора. Выходной вал 1 поворачивается и передает вращение на датчик положения 3, который выдает сигнал, пропорциональный углу поворота выходного вала 1.
По сравнению с прототипом предлагаемое изобретение имеет меньшие массу и габариты за счет выполнения второй ступени в виде волновой передачи и соосного расположения зубчатого колеса первой ступени редуктора, второй и третьей ступеней редуктора и датчика положения и использования меньшего числа колес и подшипников, увеличенную точность канала обратной связи за счет применения жесткой связи датчика положения с рулевой поверхностью и больший кпд за счет замены трения скольжения в зубчатом зацеплении волновой передачи прототипа на трение качения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ МИНИ-ПРИВОД | 2007 |
|
RU2321138C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| МУЛЬТИПЛИКАТОР ВЫСОКОМОЩНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2015 |
|
RU2588351C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1996 |
|
RU2102282C1 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении | 2015 |
|
RU2611471C2 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
Изобретение относится к рулевым приводам аэродинамических поверхностей беспилотных летательных аппаратов. Имеется корпус, который закреплен в общем блоке рулевых приводов. Вал электродвигателя соединен с конической шестерней первой ступени трехступенчатого редуктора. Третья ступень редуктора выполнена в виде волновой передачи, содержащей волнообразователь, гибкое колесо, волновую муфту, соединенную с корпусом, и жесткое колесо. Последнее представляет собой составную часть выходного вала, связанного с валом датчика положения. Предусмотрено опорное устройство выходного вала. Отличие исполнительного механизма заключается в том, что вторая ступень трехступенчатого редуктора выполнена в виде волновой передачи и расположена соосно с волновой передачей третьей ступени, коническим колесом первой ступени и датчиком положения. При этом датчик положения расположен внутри второй и третьей ступеней трехступенчатого редуктора, а вал датчика положения жестко соединен с выходным валом. Данный исполнительный механизм характеризуется повышенным кпд, улучшенными массогабаритными показателями и увеличенной точностью канала обратной связи за счет непосредственного соединения датчика положения рулевой поверхности с выходным валом. 1 з.п. ф-лы, 3 ил.
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1996 |
|
RU2102282C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| DE 4009549 A1, 26.09.1991 | |||
| Устройство для транспортирования штучных грузов | 1979 |
|
SU878688A1 |

