Изобретение относится к транспортным средствам, более точно к безрельсовым средствам, обеспечивающим перемещение предметов и транспортных средств по лестницам, и может быть использовано по указанному назначению.
В патентной литературе известно множество приспособлений, обеспечивающих перемещение предметов и транспортных средств по лестницам. Эти известные средства условно могут быть разделены на несколько групп.
1 группа. Приспособления, обеспечивающие передвижение за счет установки на перемещаемое средство гусеничной ленты. Эти средства описаны в патентах РФ №2201367, ФРГ №19708102 от 28.02.1997, Франция №2697220 от 23.10.1992, Франция №2659285 от 06.03.1990, Франция №2652327 от 28.09.1989, Франция №2609267 от 07.01.1987.
Недостатком таких приспособлений является сложность при изготовлении деталей механизма гусеницы; постоянное рабочее положение - гусеница не убирается при движении по ровной поверхности; увеличенное (по сравнению с колесным вариантом) усилие при толкании-движении.
2 группа. Приспособления передвижения, представляющие собой установленные на каждом колесе транспортного средства дополнительные, меньшие по радиусу колеса. Например, патент РФ №2005113099 от 10.11.2006. Недостатком этих транспортных средств является чрезмерная сложность исполнения, громоздкость конструкции и неудобство при эксплуатации, т.к. необходимо постоянно изменять направление вектора прикладываемой силы.
3 группа. Приспособления, обеспечивающие передвижение, выполнены в виде 2-х пластин, между которыми установлены ролики. Например, патент РФ №2095266 от 12.10.1997, патент SU №1736801 от 27.02.1989, патент США №3.266.813 от 16.08.1966, патент США №2.772.096 от 27.11.1956, патент США №2.565.237 от 21.08.1951, патент Франция №2720364 от 26.05.1994. Следует учитывать, что основным недостатком таких приспособлений является наличие паразитной тряски при движении по ступеням. Этот нежелательный эффект можно объяснить тем, что опорой является только кромка ступени. Если оси стоящих рядом колес находятся на расстоянии, равном или больше радиуса самого колеса, появляется сильные вибрации и тряски при движении по кромке ступеней. В случае, когда ролики расположены в «шахматном» порядке (если посмотреть на проекцию сверху) полезной рабочей частью приспособления является только поверхность ролика, которая касается кромки ступени. Расстояние между линией, проведенной по касательной к кромкам ступеней, и линией, которая соединяет центры проекции роликов на боковую пластину, будет равно радиусу ролика. При продвижении приспособления вдоль лестницы кромка ступени попадает в «ложбинку» - пустое пространство между роликами, при этом расстояние между линией, проведенной по касательной к кромкам ступеней, и линией, которая соединяет центры проекции роликов на боковую пластину, будет меньше радиуса ролика. При дальнейшем движении кромка ступени выходит из «ложбинки» и расстояние между нашими касательными вновь становиться равно радиусу ролика. Изменения расстояния между линией, соединяющей кромки ступеней, и линией, соединяющей центры проекции роликов на боковую плоскость, служат причиной возникновения паразитной тряски изделия при движении.
4 группа. Приспособления, обеспечивающие передвижение, выполнены в виде 2-х пластин, в которых ролики установлены под углами, большими или меньшими 90 градусов. Например, патент JP № 10-324249 от 08.12.1998. Однако его недостатком являться то, что вектор движения ролика не совпадает с вектором движения самого устройства. Таким образом возможна ситуация, при которой ролик не будет вращаться, а может быть просто заклинен, что в свою очередь не будет обеспечивать облегчение перемещения приспособления по ступеням или лестницам.
Наиболее близким к заявленному устройству является техническое решение по патенту РФ №2095266, которое выбрано в качестве прототипа.
Приспособление по указанному патенту представляет собой ручную тележку для перемещения по лестнице, содержащую раму с ручкой, колеса и шарнирно связанные с рамой посредством стержней с возможностью перемещения в продольных вертикальных плоскостях и фиксации в требуемых положениях роликовые опоры, каждая из которых включает установленные между двух пластин ролики, отличающиеся тем, что расстояние между осями роликов каждой опоры равно 0,6 их диаметра.
Недостатком его, так же как и недостатком устройств этой группы является тряска его при движении по кромкам ступеней. Это вызвано тем, что расстояние между осями соседних роликов равно 0,6 d ролика, т.е. ролики расположены в так называемом «шахматном» порядке (если посмотреть на проекцию сверху). При детальном рассмотрении процесса движения роликов, расположенных таким образом по ребрам ступени становиться ясно, что площадь контакта - это точка, или скажем «пятно контакта», в котором поверхность только одного ролика соприкасается с ребром ступени. Рассмотрим процесс с момента, когда расстояние между линией, проведенной по касательной к ребрам ступеней и линией, которая соединяет центры осей роликов будет равно радиусу ролика. При следующем продвижении устройства по лестнице активной рабочей поверхностью продолжает оставаться та же точка, «пятно контакта», в котором поверхность только одного ролика соприкасается с ребром ступени - ролик вращается вокруг своей оси, но при этом расстояние между линией, проведенной по касательной к ребрам ступеней, и линией, которая соединяет центры осей роликов, будет уменьшаться, пока не произойдет контакт ребра ступени и поверхности одновременно двух соседних роликов. В этой точке расстояние между линией, проведенной по касательной к ребрам ступеней, и линией, которая соединяет центры осей роликов, будет меньше радиуса ролика на 15%. При дальнейшем движении пятно контакта переходит на следующий ролик, т.е. теперь тоже ребро ступени уже в контакте со следующим роликом и расстояние между нашими касательными вновь увеличивается, пока не станет равно радиусу ролика. Далее процесс будет повторяться, как было описано выше. Вывод - изменения расстояния между линией, соединяющей кромки ступеней, и линией, соединяющей центры осей роликов, является причиной возникновения паразитной тряски изделия при движении.
Техническим результатом заявляемого изобретения является повышение эксплуатационных свойств приспособления за счет устранения паразитной вибрации. Устранение тряски позволят использовать это приспособление в детских колясках, в средствах для транспортировки по лестницам больных, для перемещения по лестницам точной аппаратуры (например, медицинской), а также для перемещения мебели со значительной площадью стекол и зеркал.
Указанный технический результат достигается тем, что в известном приспособлении для перемещения предметов и транспортных средств по ступеням, выполненным в виде опоры, содержащей две параллельные пластины с установленными между ними на стержнях роликами, образующими рабочую поверхность, приспособление снабжено элементами крепления к перемещаемым объектам, ролики выполнены одинакового размера, отличающееся тем, что стержни установлены под одинаковыми углами, большими или меньшими 90 градусов, а их количество и величина углов, под которыми расположены стержни, выбраны из условия, чтобы расстояние между проекциями на боковые плоскости центров рядом расположенных роликов составляло не более 1/4 их радиуса.
Величина рабочей поверхности приспособления в направлении движения преимущественно превышает расстояние между ребрами 2-х рядом расположенных ступеней не менее чем в 2 раза.
Толщина ролика выбирается исходя из предполагаемой нагрузки на изделие и материала, из которого будет выполнен ролик. Минимальная длина приспособления должна превышать расстояние между кромками соседних ступеней не менее чем в 2 раза, чтобы изделие всегда имело минимум две точки опоры.
В результате проведенных расчетов и последующих экспериментов было установлено, что для передвижения по ступеням с обычным расстоянием (33-40 см) между ребрами соседних ступеней наиболее оптимальной является величина расстояния между проекциями на боковые плоскости центров ближайших роликов, равная 1/4 радиуса ролика, количество роликов на одной оси не менее 8 (т.к. расстояние между центрами роликов мы берем равное 1/4 радиуса, то легко найти, что проекция девятого ролика на «мнимой оси» совпадет с проекцией первого ролика на следующей за ней оси), а угол поворота оси к боковой плоскости зависит от толщины ролика и диаметра его внутреннего отверстия, т.е. в среднем это 45 градусов. В этом случае приспособление обеспечивает контакт роликов с плоскостью опоры (ступенями) таким образом, что расстояние между линией, соединяющей оси роликов, и линией, касательной к кромкам ступеней, будет изменяться в пределах менее 1% радиуса ролика в любой ее точке, что приводит к ликвидации эффекта паразитной вибрации, а также к устранению тряски изделия при движении по кромкам ступеней.
Чтобы приспособление в каждый момент своей работы опиралось на ребра не менее двух ступеней, расстояние между проекциями крайних роликов на боковые плоскости или рабочая длина изделия должна быть не менее двух длин расстояния между кромками соседних ступеней.
Изобретение поясняется фигурами, где даны следующие изображения:
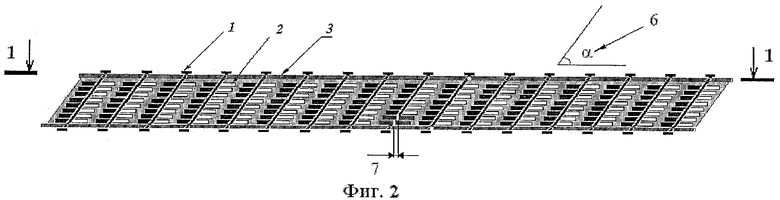
фиг.1 - приспособление, вид сбоку;
фиг.2 - вид сверху;
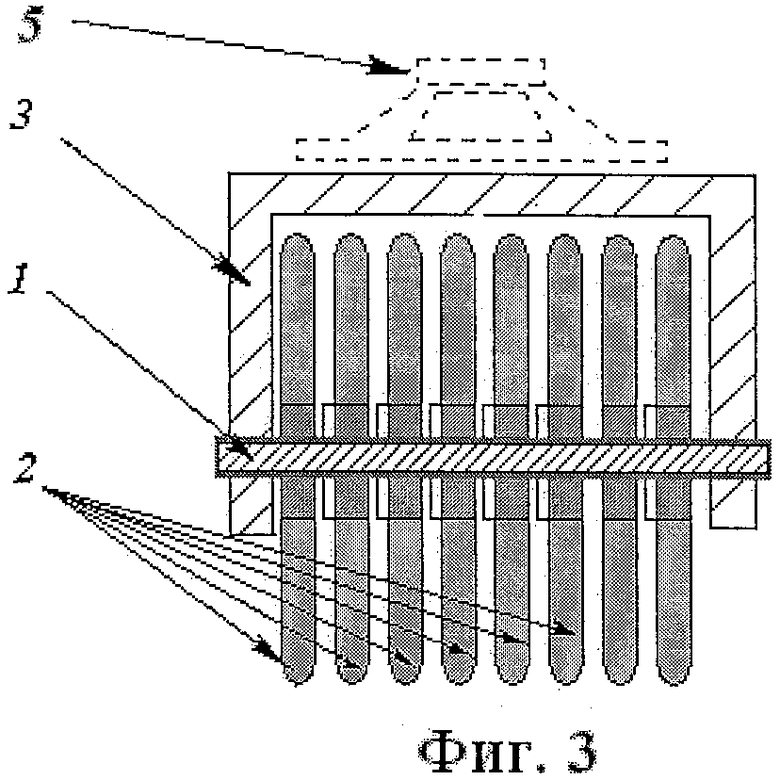
фиг.3 - вид спереди;
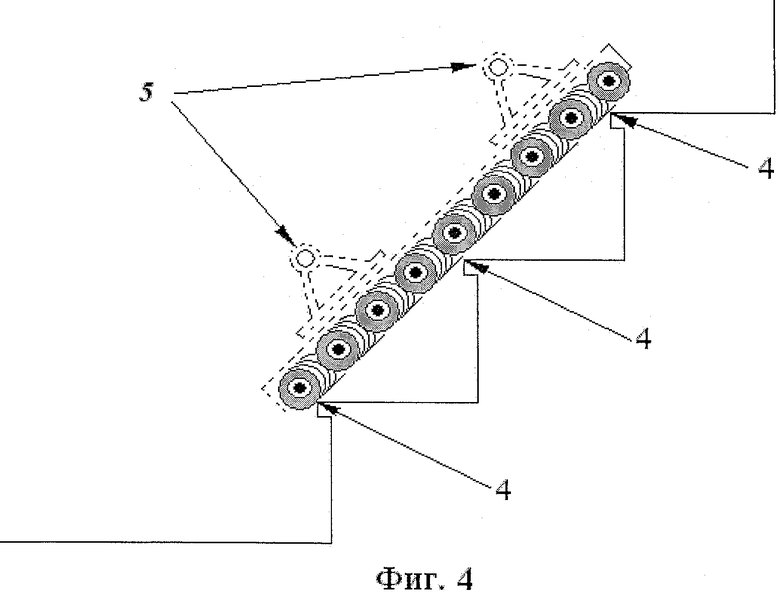
фиг.4 - общий вид.
На фигурах цифрами обозначены следующие позиции: 1 - оси роликов, 2 - ролики, 3 - боковые пластины, 4 - рабочая поверхность приспособления, 5 - элементы крепления к перемещаемым объектам, 6 - угол между осью роликов и пластиной, 7 - расстояние между проекциями на боковые плоскости центров рядом расположенных роликов.
Приспособление используют следующим образом.
Перед началом эксплуатации приспособление устанавливают на перемещаемом объекте с помощью элементов крепления 5. Далее размещают рабочую поверхность 4 на ребрах рядом расположенных ступеней. С помощью мускульной силы осуществляют передвижение приспособления на его роликах 2 вместе с объектом по ребрам ступеней таким образом, чтобы приспособление все время опиралось не менее, чем на два ребра ступеней. Для этого рабочая поверхность приспособления должна превышать расстояние между ребрами двух рядом расположенных ступеней не менее чем в 2 раза.
Изобретение относится к средствам, обеспечивающим возможность перемещения предметов по лестницам. Приспособление снабжено элементами крепления к перемещаемым предметам и выполнено в виде опоры, содержащей две параллельные пластины (3) с установленными между ними одинаковыми роликами (2) на осях (1) в виде стержней, которые установлены под одинаковыми углами, большими или меньшими 90 градусов. Количество осей (1) и величина углов, под которыми расположены оси (1), выбраны из условия, чтобы расстояние (7) между проекциями на боковые плоскости центров рядом расположенных роликов (2) составляло не более 1/4 их радиуса. Техническое решение направлено на снижение тряски. 1 з.п. ф-лы, 4 ил.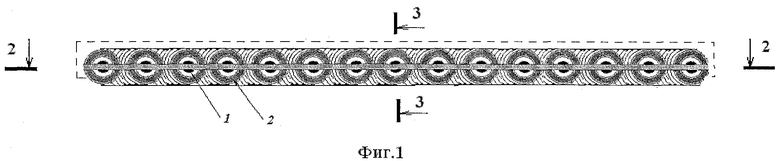
| US 3266813 А, 16.08.1966 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Система непрерывной загрузки бурильных труб в рабочую зону буровой установки | 2022 |
|
RU2788220C1 |
| Конвейер для транспортирования штучных грузов | 1990 |
|
SU1795951A3 |

