Изобретение относится к транспортному машиностроению и может быть использовано в производстве инвалидных колясок, предназначенных для передвижения по ступенчатым поверхностям.
При рассмотрении технической литературы выявлен ряд конструктивных решений, относящихся к указанной проблематике.
Известно шасси для передвижения по различным опорным поверхностям с колесно-шаговыми движителями, каждое из колес которого выполнено в виде закрепленных на ступице опор, оснащенных башмаками и выполненных с возможностью изменения своей длины для возможности перемещения по лестничным маршам различного размера; каждый из колесно-шаговых движителей состоит из трех опор, закрепленных на общем валу симметрично относительно оси вращения вала и наклонно друг к другу, образуя боковые ребра воображаемой пирамиды; вал расположен под углом к опорной поверхности таким образом, чтобы опорной поверхности касались не более двух опор от каждого колесно-шагового движителя одновременно, закреплен с возможностью поперечных движений и кинематически связан с закрепленным на шасси компенсатором колебаний (патент на изобретение RU 2626285, кл. B62D 57/02, B62D 57/032, опубл. 15.08.2017 г., бюл. №23)
Недостатками данного шасси являются:
сложность конструкции, обусловленная необходимостью применения устройства для компенсации колебаний шасси при обеспечении плавности его хода при движении по горизонтальным и наклонным поверхностям;
отсутствие возможности его применения в креслах-колясках с ручным приводом.
Известна коляска для людей с ограниченными возможностями в ходьбе содержащая по два ведущих и ведомых колеса, выполненных в форме «звезды» с тремя равномерно распределенными по окружности «лучами», на концах которых установлены по два опорных колеса, сиденье, установленное на раме с возможностью подъема ее задней части при движении по наклонным поверхностям, включая ступенчатые, за счет двух подвижно присоединенных к ней подъемных винтовых домкратов, противоположный конец каждого из которых подключен к установленному на ведущем валу с возможностью осевого перемещения сателлитному редуктору, имеющему подвижное осевое соединение с закрепленным на движителе основным редуктором, от которого обеспечивается передача вращательного усилия через подвижное осевое соединение и выполненное в сателлитном редукторе шестеренное соединение на подъемный винтовой домкрат, при этом каждый сателлитный редуктор неподвижно прикреплен к прижимному стакану, установленному на ведущем валу с возможностью осевого перемещения под воздействием подвижно присоединенного к нему прижимного винтового домкрата, противоположный конец которого подключен к основному редуктору, прижимной стакан подвижно присоединен к прижимной втулке, выполненной с равномерно распределенными по ее окружности продольными прорезями, в каждой из которых размещен жестко закрепленный на ведущем валу упор, и снабженной неподвижно прикрепленной к ней ступичной полумуфтой, с помощью которой обеспечивается возможность передачи вращательного усилия от ведущего вала на ступицу ведущего колеса, переводя тем самым ведущее колесо в режим выполнения шагающей функции, для обеспечения выполнения ведущим колесом вращательной функции ведомый зубчатый шкив, подвижно установленный во внутренней полости его ступицы, снабжен подвижной связью с установленным на ведущем валу ведущим зубчатым шкивом посредством зубчатого приводного ремня и попарно распределенных на равном удалении от ведущего зубчатого шкива направляющих роликов, которые подвижно установлены во внутренней полости ступицы на равном удалении от зубчатого шкива с возможностью регулирования натяжения зубчатого приводного ремня (патент на изобретение RU 2688288, кл. A61G 5/00, опубл. 21.05.2019 г., бюл. №15).
Основной недостаток данной коляски заключается в отсутствии возможности его применения в креслах-колясках с ручным приводом.
Наиболее близким к заявляемому изобретению является ведущее колесо малогабаритного транспортного средства с устройством для подъема по лестницам, содержащее жестко закрепленное на ведущем валу ведущее колесо, толкатель, выполненный из зубчатой рейки с жестко прикрепленными к ее боковым поверхностям пластинами скольжения, привод, установленный на ведущем валу с возможностью осевого перемещения из нейтрального положения в рабочее и обратно при помощи прижимного узла, снабженного жестко присоединенным к приводу прижимным стаканом с подвижно закрепленным на нем прижимным рычагом, жестко закрепленную на ведущем валу зубчатую втулку, обеспечивающую передачу вращающего момента от ведущего вала на привод, два жестко закрепленных на опоре малогабаритного транспортного средства ограничителя радиального перемещения привода, привод снабжен ведущей и жестко соединенными между собой и установленными на общей оси ведомой и исполнительной шестернями, а также прижимным хомутом с подвижно закрепленным в нем прижимным роликом, обеспечивающим постоянную зубчатую связь исполнительной шестерни с толкателем при различных углах толкателя относительно опорной поверхности лестницы, ведущая шестерня выполнена с внутренними зубьями, которые входят в зацепление с зубчатой втулкой при переключении привода в рабочее положение, (патент на изобретение RU 2698272, кл. B62D 57/024, опубл. 23.08.2019 г., бюл. №24).
Основной недостаток данной коляски заключается в отсутствии возможности его применения в креслах-колясках с ручным приводом.
Задача, решаемая в изобретении, заключается в устранении указанных недостатков путем применения технического решения, обеспечивающего простоту конструкции устройства для подъема кресла-коляски с ручным приводом по лестницам.
Технический результат изобретения заключается в повышении технических возможностей подъема кресла-коляски с ручным приводом по лестницам.
Поставленная задача решается, а технический результат достигается в результате того, что, согласно изобретению, устройство для подъема кресла-коляски с ручным приводом по лестницам и содержит две параллельно расположенные относительно друг друга рамы, два маневровых колеса, подвижно установленных на осях, закрепленных на раме, два самоориентирующихся колеса, подвижно закрепленных на стойках рамы, механизм подъема кресла-коляски, включающий вал, установленный в задней части каждой рамы, два храповых колеса, два подъемных рычага, две рукояти;
причем каждая рукоять жестко присоединена к подшипнику, закрепленному на конце вала на расстоянии от рамы, обеспечивающем свободное движение рукояти;
причем каждое храповое колесо неподвижно закреплено на концах вала с внешней стороны подшипника с рукоятью;
причем каждый подъемный рычаг неподвижно присоединен к внешней боковой поверхности храпового колеса и размещен между маневровым колесом и рамой;
причем маневровые колеса имеют радиусы, равные 0,25 м;
причем самоориентирующиеся колеса имеют радиусы, равные 0,15 м;
причем оси маневровых колес установлены на нижней поперечине рамы на расстоянии от ее задней части, равном 0,30 м;
причем каждая рама имеет форму выпуклого четырехугольника, у которой длина нижней поперечины превышает длину каждой из трех других поперечин и выполнена под углом 30° к горизонтальной плоскости, на которую опираются маневровые и самоориентирующиеся колеса;
причем каждый подъемный рычаг имеет форму вытянутого овала длиной, равной 0,4 м.
причем каждая рукоять снабжена подвижно закрепленной на стержне подпружиненной собачкой, с соприкосновением ее нижней части с зубьями храпового колеса;
причем на закрепленном на раме стержне установлен подпружиненный стопор, с соприкосновением его нижней части с зубьями храпового колеса. Изобретение поясняется фиг.1-8.
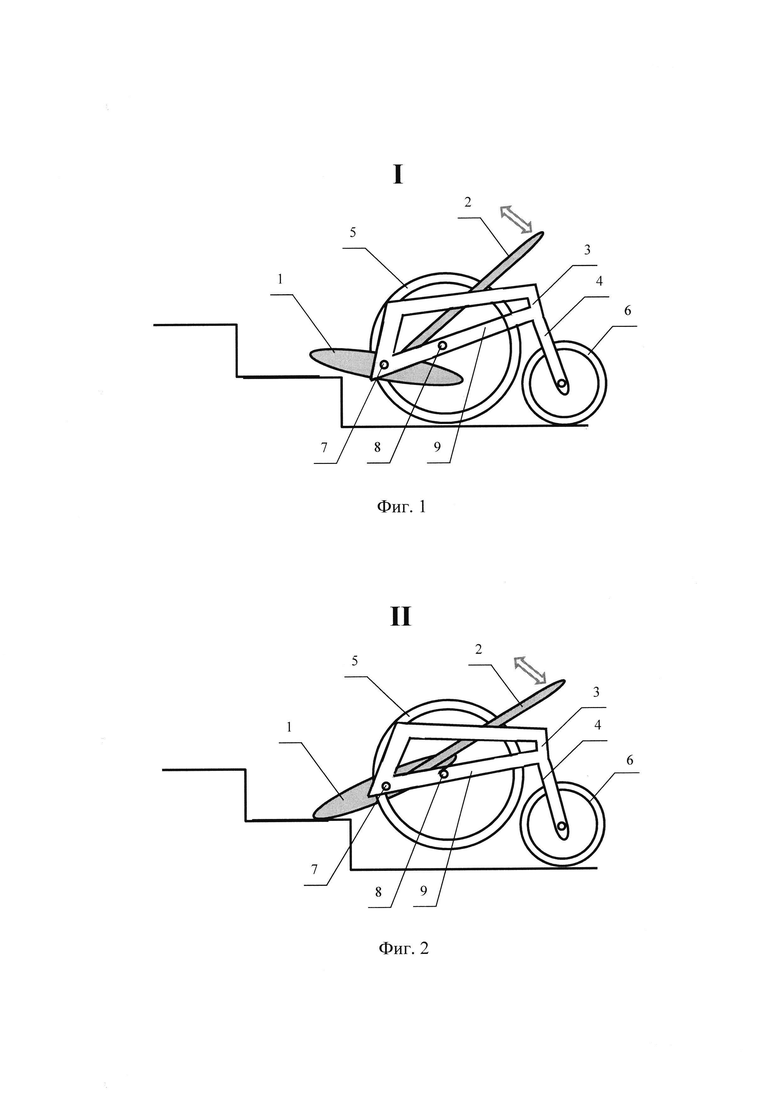
На фиг.1 изображено устройство для подъема кресла-коляски с ручным приводом по лестницам в положении перед началом передвижения по ступенчатой поверхности, вид в разрезе сбоку (фаза I).
На фиг.2 изображено устройство для подъема кресла-коляски с ручным приводом по лестницам в первом промежуточном положении подъема на ступень лестницы, вид в разрезе сбоку (фаза II).
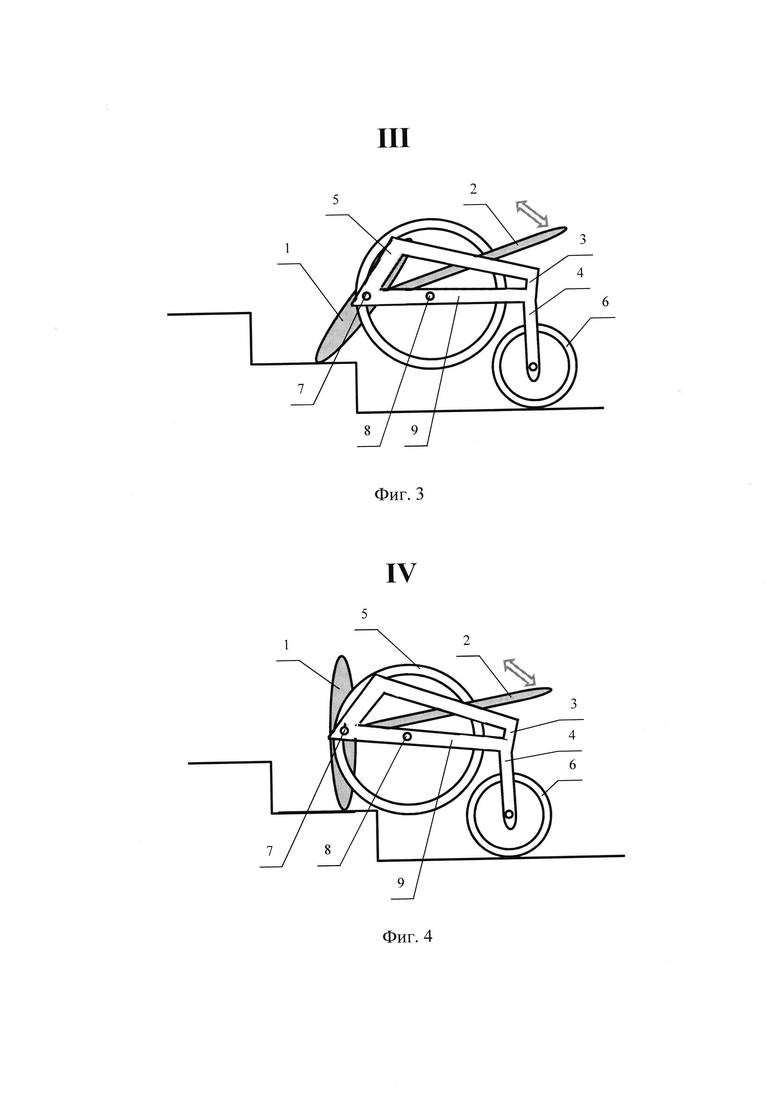
На фиг.3 изображено устройство для подъема кресла-коляски с ручным приводом по лестницам во втором промежуточном положении подъема на ступень лестницы, вид в разрезе сбоку (фаза III).
На фиг.4 изображено устройство для подъема кресла-коляски с ручным приводом по лестницам во втором промежуточном положении подъема на ступень лестницы, вид в разрезе сбоку (фаза IV).
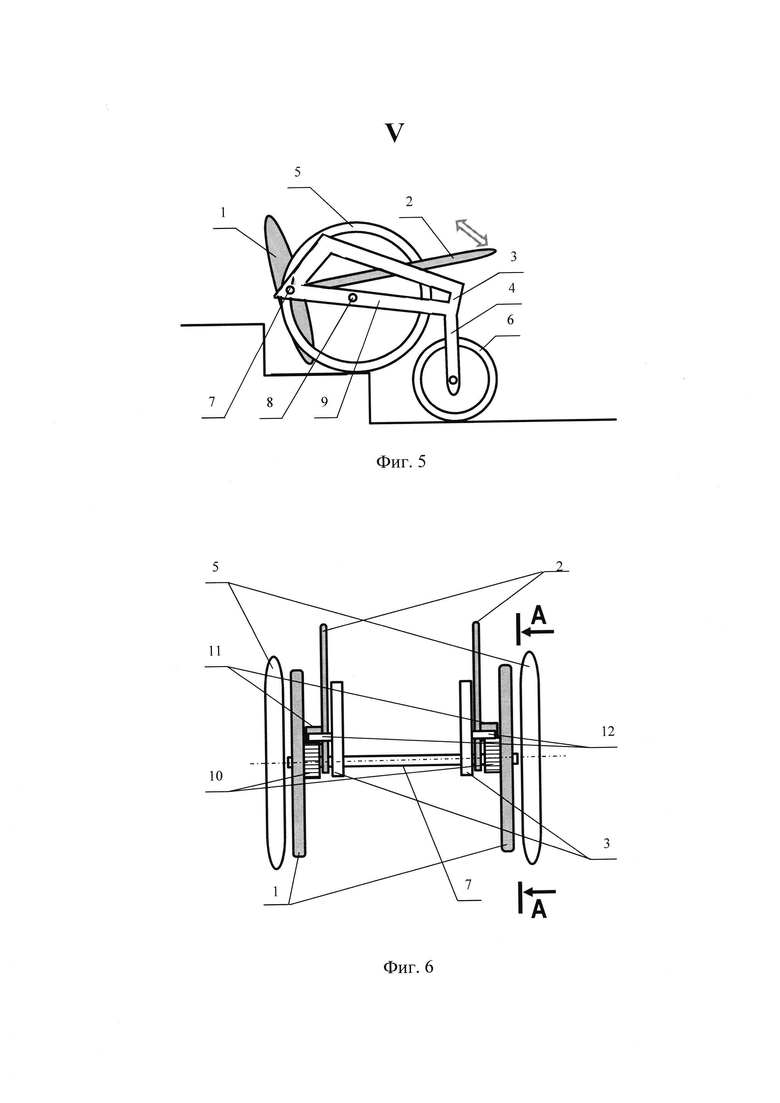
На фиг.5 изображено устройство для подъема кресла-коляски с ручным приводом по лестницам в положении установки ведущего колеса на ступень лестницы, вид в разрезе сбоку (фаза V).
На фиг.6 изображен механизм подъема кресла-коляски, вид сзади.
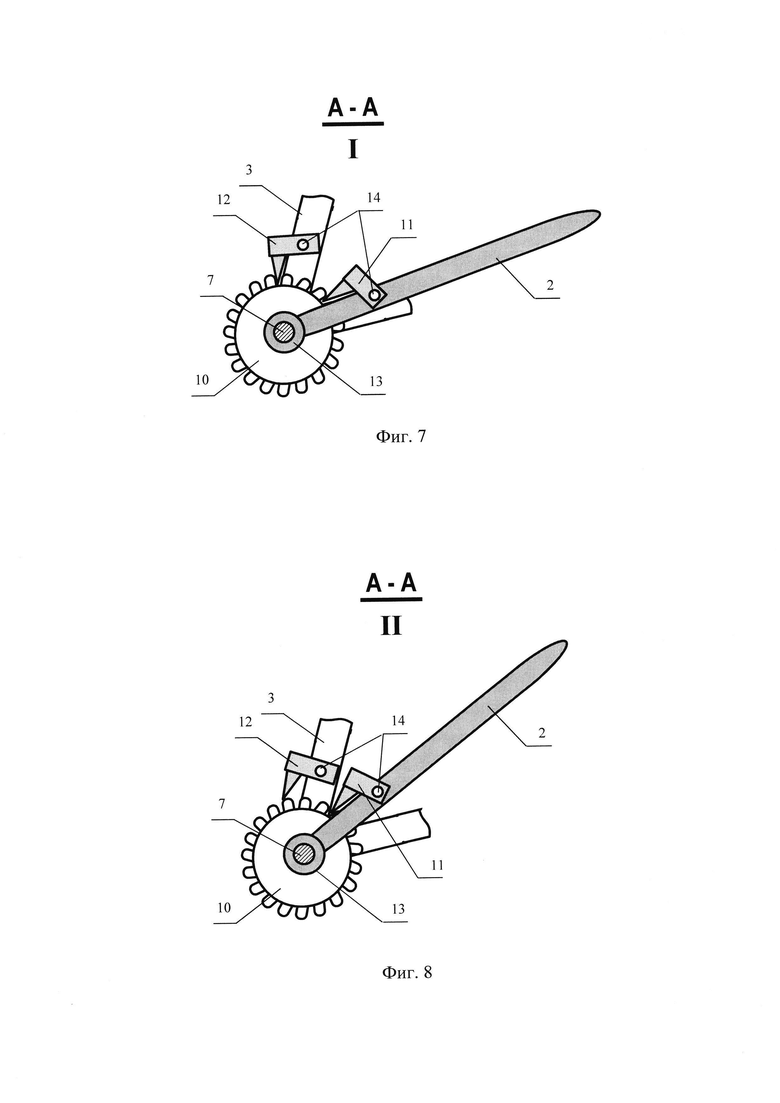
На фиг.7 изображен механизм подъема кресла-коляски перед началом поворота рукояти, вид в разрезе сбоку (фаза I).
На фиг.8 изображен механизм подъема кресла-коляски в стадии поворота рукояти, вид в разрезе сбоку (фаза II).
На фиг.1-8 применены следующие обозначения:
1 - подъемный рычаг;
2 - рукоять;
3 - рама;
4 - стойка;
5 - маневровое колесо;
6 - самоориентирующееся колесо; 7-вал;
8 - ось;
9 - нижняя поперечина;
10 - храповое колесо;
11 - подпружиненная собачка;
12 - подпружиненный стопор;
13 - подшипник;
14 - стержень.
Устройство для подъема кресла-коляски с ручным приводом по лестницам работает следующим образом.
Для минимизации сопротивления от колес кресла-коляски при его движении по лестнице с учетом минимальной ширины проступей и максимальной нормативной высоты ступеней для зданий и сооружений (согласно пункту 5.1.12 СП 59.13330.2020 «Доступность зданий и сооружений для маломобильных групп населения», минимальная нормативная ширина проступей должна составлять 0,35 м, максимальная нормативная высота ступеней для зданий и сооружений - 0,15 м) каждое из двух маневровых колес 5 выполняют радиусом, равным 0,25 м, каждое их двух самоориентирующихся колес 6 выполняют радиусом, равным 0,15 м. Для обеспечения плавного перемещения кресла-коляски при его подъеме на ступени каждый из двух подъемных рычагов 1 выполняют в форме вытянутого овала длиной, равной 0,4 м. Раму 3 выполняют в форме выпуклого четырехугольника. Нижнюю поперечину 9 выполняют длиной, превышающей длину каждой из трех других поперечин под углом 30° к горизонтальной плоскости, на которую опираются маневровые 5 и самоориентирующиеся 6 колеса. Вал 7 устанавливают в задней части каждой рамы 3. На каждом конце вала 7 закрепляют подшипник 13 с жестко присоединенной к нему рукоятью 2 на расстоянии от рамы 3, обеспечивающем свободное движение рукояти 2. Затем на каждом конце вала 7 неподвижно закрепляют храповое колесо 10 с неподвижно присоединенным к его внешней боковой поверхности подъемным рычагом 1. На стержне 14 каждой рукояти 2 закрепляют подпружиненную собачку 11, соприкасающуюся своей нижней частью с зубьями храпового колеса 10. На закрепленном на раме 3 стержне 14 устанавливают подпружиненный стопор 12, соприкасающийся своей нижней частью с храповым колесом 10. Оси 8 маневровых колес 5 устанавливают на нижней поперечине 9 рамы 3 на расстоянии от ее задней части, равном 0,30 м с обеспечением размещения подъемного рычага 1 между маневровым колесом 5 и рамой 3. На стойках 4 рамы 3 устанавливают самоориентирующиеся колеса 6.
До начала подъема кресла-коляски по лестнице подъемные рычаги 1 приводят в положение, при котором они находятся под углом 10° к горизонтальной поверхности ступеней. Одну или обе рукояти 2 поднимают вверх, поворачивая рукояти 2 на подшипниках 13 вокруг вала 7, переводя нижнюю часть каждой подпружиненной собачки 11 в зацепление с зубьями каждого храпового колеса 10, поворачивая его и каждый подъемный рычаг 1, устанавливают ближний к ступени конец каждого подъемного рычага 1 на поверхность следующей проступи. При этом поднимают заднюю часть каждой рамы 3 с закрепленным на ее нижней поперечине 9 маневровым колесом 5 на оси 8, одновременно перемещая каждое самоориентирующееся колесо 6 на стойке 4. После достижения каждой рукоятью 2 верхнего положения каждый подпружиненный стопор 12 поворачивается на стержне 14, переводя нижнюю часть каждой подпружиненной собачки 11 в зацепление с зубьями каждого храпового колеса 10, фиксируя его положение до повторного перевода каждой рукояти 2 в верхнее положение.
После достижения каждым подъемным рычагом 1 вертикального положения с установкой каждого маневрового колеса 5 на поверхность верхней проступи Одну или обе рукояти 2 поднимают вверх, поворачивая каждый подъемный рычаг 1 с установкой его противоположного конца на поверхность очередной проступи. Указанные действия повторяются до окончания подъема кресла-коляски по лестнице.
Таким образом, в результате реализации предложенного технического решения обеспечивается простота конструкции устройства для подъема кресла-коляски с ручным приводом по лестницам и повышение его технических возможностей.
Изобретение относится к транспортному машиностроению и может быть использовано в производстве инвалидных колясок, предназначенных для передвижения по ступенчатым поверхностям. Устройство для подъема кресла-коляски с ручным приводом по лестницам содержит две параллельно расположенные относительно друг друга рамы, два маневровых колеса, подвижно установленных на осях, закрепленных на раме, два самоориентирующихся колеса, подвижно закрепленных на стойках рамы, механизм подъема кресла-коляски, включающий вал, установленный в задней части каждой рамы, два храповых колеса, два подъемных рычага, две рукояти. 5 з.п. ф-лы, 8 ил.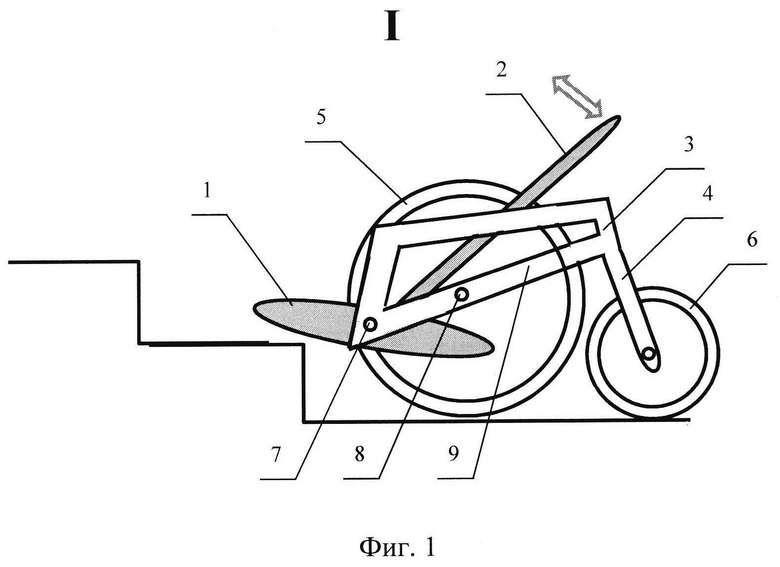
1. Устройство для подъема кресла-коляски с ручным приводом по лестницам, содержащее две параллельно расположенные относительно друг друга рамы, два маневровых колеса, подвижно установленных на осях, закрепленных на рамах, два самоориентирующихся колеса, подвижно закрепленных на стойках рам, механизм подъема кресла-коляски, включающий вал, установленный в задней части каждой рамы, два храповых колеса, два подъемных рычага, две рукояти, на каждом конце вала закреплен подшипник с жестко присоединенной к нему рукоятью на расстоянии от рамы, обеспечивающем свободное движение рукояти, каждое храповое колесо неподвижно закреплено на концах вала с внешней стороны подшипника с рукоятью, а к внешней боковой поверхности каждого храпового колеса неподвижно закреплён подъёмный рычаг, размещённый между маневровым колесом и рамой, при этом каждая рукоять снабжена подвижно закрепленной на стержне подпружиненной собачкой, соприкасающейся своей нижней частью с зубьями храпового колеса, а на закрепленном на раме стержне установлен подпружиненный стопор, соприкасающийся своей нижней частью с зубьями храпового колеса.
2. Устройство для подъема кресла-коляски с ручным приводом по лестницам по п. 1, отличающееся тем, что маневровые колеса имеют радиусы, равные 0,25 м.
3. Устройство для подъема кресла-коляски с ручным приводом по лестницам по п. 1, отличающееся тем, что самоориентирующиеся колеса имеют радиусы, равные 0,15 м.
4. Устройство для подъема кресла-коляски с ручным приводом по лестницам по п. 1, отличающееся тем, что оси маневровых колес установлены на нижней поперечине рамы на расстоянии от ее задней части, равном 0,30 м.
5. Устройство для подъема кресла-коляски с ручным приводом по лестницам по п. 1, отличающееся тем, что каждая рама имеет форму выпуклого четырехугольника, у которой длина нижней поперечины превышает длину каждой из трех других поперечин и выполнена под углом 30° к горизонтальной плоскости, на которую опираются маневровые и самоориентирующиеся колеса.
6. Устройство для подъема кресла-коляски с ручным приводом по лестницам по п. 1, отличающееся тем, что каждый подъемный рычаг имеет форму вытянутого овала длиной, равной 0,4 м.
| Ведущее колесо малогабаритного транспортного средства с устройством для подъёма по лестницам | 2018 |
|
RU2698272C1 |
| Кресло-коляска для инвалидов | 1987 |
|
SU1512601A1 |
| JP 2007161224 A, 28.06.2007 | |||
| RU 2005123922 A, 10.02.2007 | |||
| US 2002104692 A1, 08.08.2002. | |||

