Изобретение относится к зубчатым героторным механизмам внутреннего зацепления (ГМ) с разницей в числах зубьев его деталей (статор и ротор), равной единице. Ось ротора смещена от оси статора на величину эксцентриситета зацепления. Торцовые профили их зубьев выполнены сопряженными с общим исходным контуром зацепления, представляющим собой профиль рейки, очерченный эквидистантой укороченной циклоиды, при этом исходный контур рейки (ИКР) и профили статора и ротора имеют смещение, перпендикулярное оси механизма. Профили зубьев статора и ротора выполняются плавными и находятся в непрерывном контакте с натягом.
Подобные механизмы могут быть использованы в гидромашинах в качестве рабочих органов, например, гидродвигателей (и насосов) при винтовой форме зубьев органов и выполнении зубьев статора из эластичного материала.
Известен ГМ с внутренним зацеплением, содержащий два зубчатых звена: статор и ротор с разницей в числах их зубьев, равной единице. Торцовые профили зубьев статора и ротора выполнены в виде кривых, огибаемых общим исходным контуром рейки, профиль которой очерчен эквидистантой укороченной циклоиды. Общий исходный контур рейки имеет смещение Δh1 при образовании профиля статора и Δh2 - ротора. Для уменьшения погрешностей зацепления приняты симметричные смещения исходного контура рейки относительно инструментальных центроид rw1 статора и rw2 ротора, величины которых равны:

где: a - эксцентриситет зацепления механизма,
r - радиус катящейся окружности, образующей циклоиду общего исходного контура рейки.
Отношение r/е, обычно, назначается равным 1,1..1,3, поэтому величина смещения является небольшой. Например, при a=5 и r=1,2a смещения равны 
Важнейшим параметром героторных механизмов является контурный диаметр Dk статора, связанный с номинальным диаметром Dfl окружности его впадин соотношением:

где Df1=2(rZ1–r+a+rц) - номинальный диаметр окружности впадин статора;
Z1 - число зубьев статора;
rц - расстояние от укороченной циклоиды до точек исходного контура рейки, назначаемое в пределах (1,5...2,5)а.
Изменение Dк влияет на техническую характеристику гидродвигателя, так как от Dк зависит площадь проходного сечения S, крутящий момент Мкр и частота вращения n на выходном конце гидродвигателя.
Недостатком данного механизма является то, что со стандартизацией формы исходного контура зацепления (рейки) контурный диаметр может быть изменен только путем замены числа зубьев Z1 или эксцентриситета а. Это накладывает ограничения на проектирование механизма и оптимизацию технической характеристики гидродвигателя.
Более близким по техническому решению к предлагаемому изобретению является героторный механизм, описанный в ОСТ 39-164-84 [1]. В нем приняты следующие параметры исходного контура зацепления: r=1,175a, rц=2,175а, причем исходный контур может иметь смещение Δh1,2, изменяемое в достаточно широких пределах:

где а - положительное смещение; -2a - отрицательное.
Благодаря соотношению (1) величина контурного диаметра статора может назначаться достаточно свободно и бесступенчато. Поэтому проектирование механизма имеет большую конструктивную гибкость по сравнению с аналогом.
Недостаток механизма, проектируемого по OCT, заключается в том, что при назначении пределов смещения исходного контура зацепления стандарт не учитывает числа зубьев статора и ротора. Поэтому положительное смешение при числе зубьев Z = 2...10 и отрицательное смещение при Z ≥ 5 (фиг.5) оказываются заниженными, что не позволяет в полной мере использовать предельно допустимые смещения по условиям плавности профилей статора или ротора. В то же время отрицательное смещение (-2а) при Z<5 является завышенным, что приводит к подрезанию профиля зубьев и нарушению непрерывности их контакта.
Задачей предлагаемого изобретения является увеличение конструктивной гибкости зацепления и повышение эффективности работы гидродвигателя. Увеличение конструктивной гибкости зацепления обеспечивается изменением и оптимизацией формы профилей путем варьирования величины смещения профилей. Повышение эффективности работы гидродвигателя обеспечивается улучшением его технической характеристики.
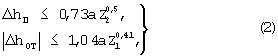
Решение этой задачи достигается тем, что в известном героторном механизме, содержащем статор и эксцентрично расположенный в нем охватываемый ротор, зубья которых находятся в непрерывном контакте и имеют разницу их чисел, равную единице, торцовые профили статора и ротора образованы общим исходным контуром рейки (зацепления) со смещением, а профиль этого контура очерчен эквидистантой укороченной циклоиды, согласно изобретению наибольшее допустимое положительное и наибольшее допустимое отрицательное смещения исходного контура рейки задают из условия отсутствия среза профиля зубьев ротора и из условия отсутствия подреза профиля впадин статора с выполнением соотношений:
а допустимое значение контурного диаметра ограничено пределами:

где

ΔhП, ΔhОТ - положительное и отрицательное соответственно смещение исходного контура рейки (или смещение профилей статора и ротора);
Dkmax, DKmin - наибольшее и наименьшее значение контурного диаметра;
а - эксцентриситет зацепления механизма;
Z1,2 - числа зубьев статора и ротора соответственно;
Dfl - номинальный диаметр впадин статора со смещением исходного контура рейки, равным нулю, который при учете того, что Z1 = Z2 +1, определится по формуле:

где r - радиус катящейся окружности, образующей нормальную циклоиду исходного контура рейки, равный 1,175a;
rц - расстояние от укороченной циклоиды до точек профиля исходного контура рейки, равное 2,175a.
Изобретение поясняется чертежами.
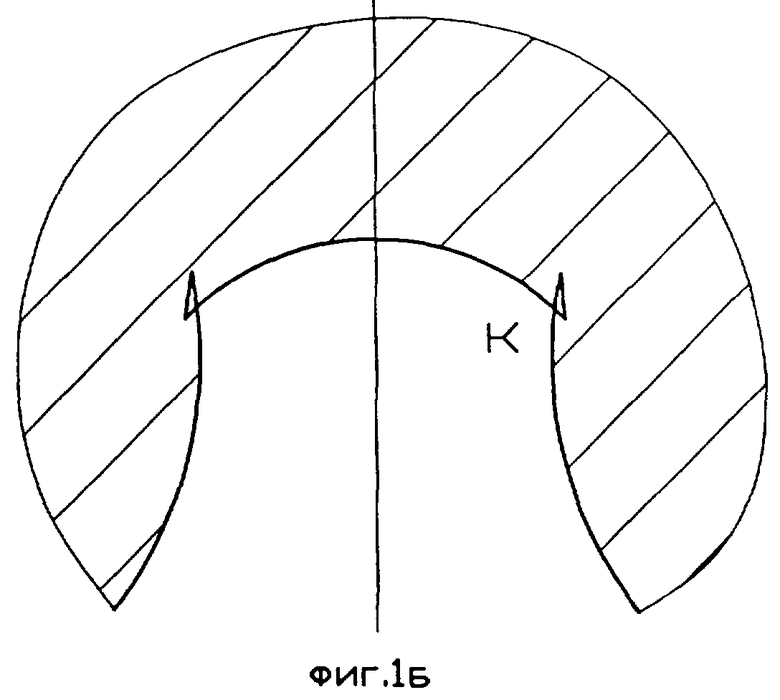
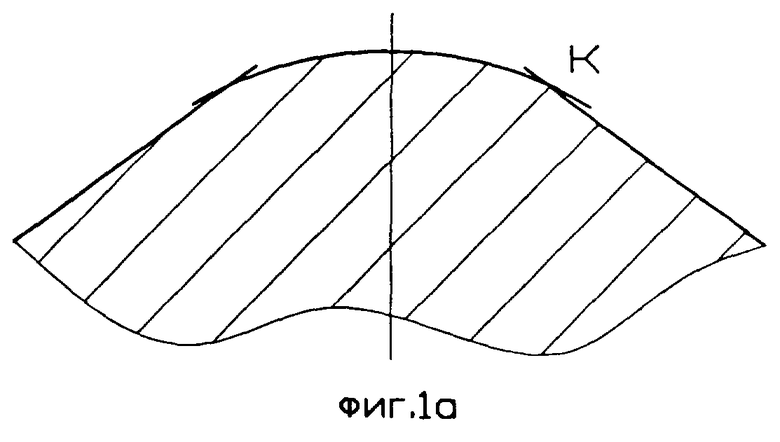
На фиг.1a показан профиль ротора со срезом у головки зуба при положительном смещении исходного контура рейки (ИКР), Z2=5, Dа=69,125, ΔhП=7, а=3,5, r=4,1125, rц=7,6125, а на фиг.1б - профиль статора с подрезом впадины у ножки зуба при отрицательном смещении исходного контура рейки (ИКР), Z1=5, Dа=37,125, ΔhОТ=7, a=3,5, r=4,1125, rц=7,6125. Точкой К обозначен излом профиля.
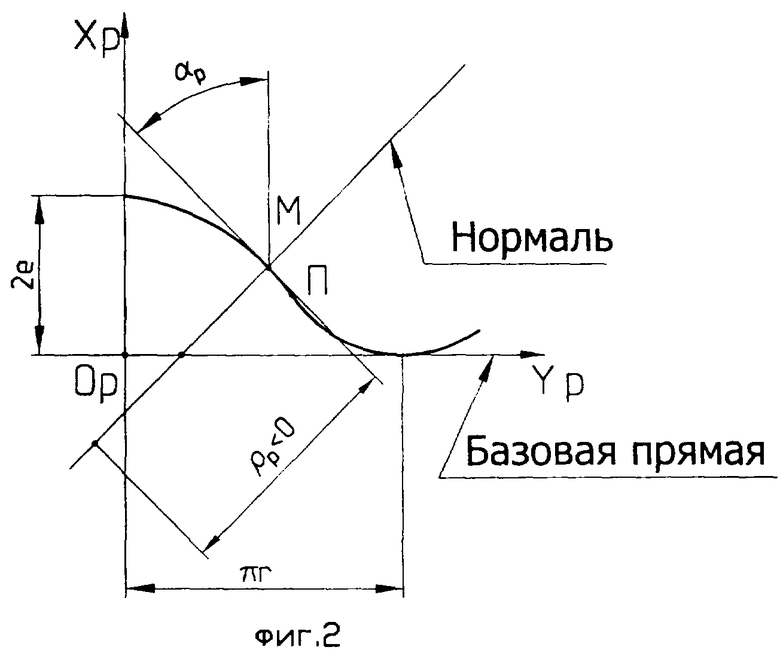
На фиг.2 приведен ИКР, определяемый координатами Хр, Yp углом профиля αp и радиусом кривизны ρр в текущей точке М Нижняя вершина профиля ИКР касается базовой прямой циклоиды. Точка П обозначает перегиб профиля ИКР, определяемый параметром ΨП = arccos (а/r).
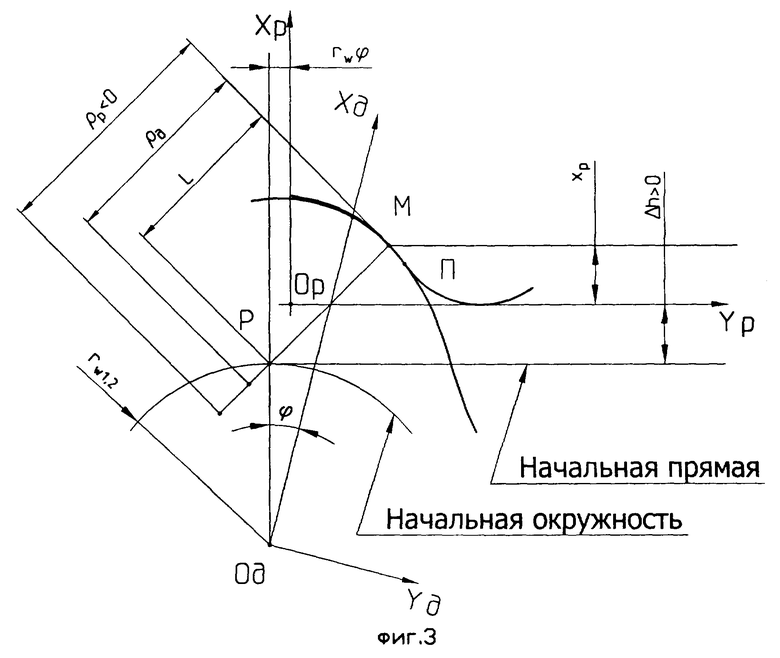
На фиг.3 зафиксирован момент зацепления ИКР с профилем зуба ротора или профилем впадины статора при повороте их осей координат Хд Yд на угол ϕ. Начальная окружность радиуса rw1,2=rz1,2, касается начальной прямой ИКР в nолоce зацепления Р.
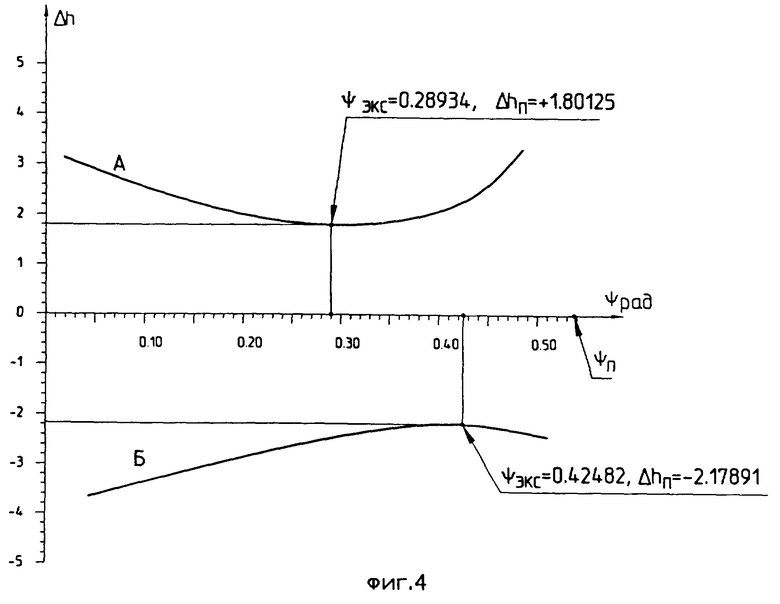
На фиг.4 приведены допустимые смещения ИКР, соответствующие каждой точке его профиля, в зависимости от параметра Ψ для конкретного числа зубьев Z=6, при а=1, r=1,75, rц=2,175. Кривая А относится к положительному смещению, Б - к отрицательному.
Значения ψэкс соответствуют экстремумам кривых А и Б.
На фиг.5 приведены предельно допустимые смещения ИКР, определяемые параметром ψэкс в зависимости от числа зубьев статора или ротора. Кривая А относится к положительному смещению. Б - к отрицательному, линии В и Г - соответствуют рекомендуемым смещениям по ОСТ 39-164-84 согласно соотношению (1).
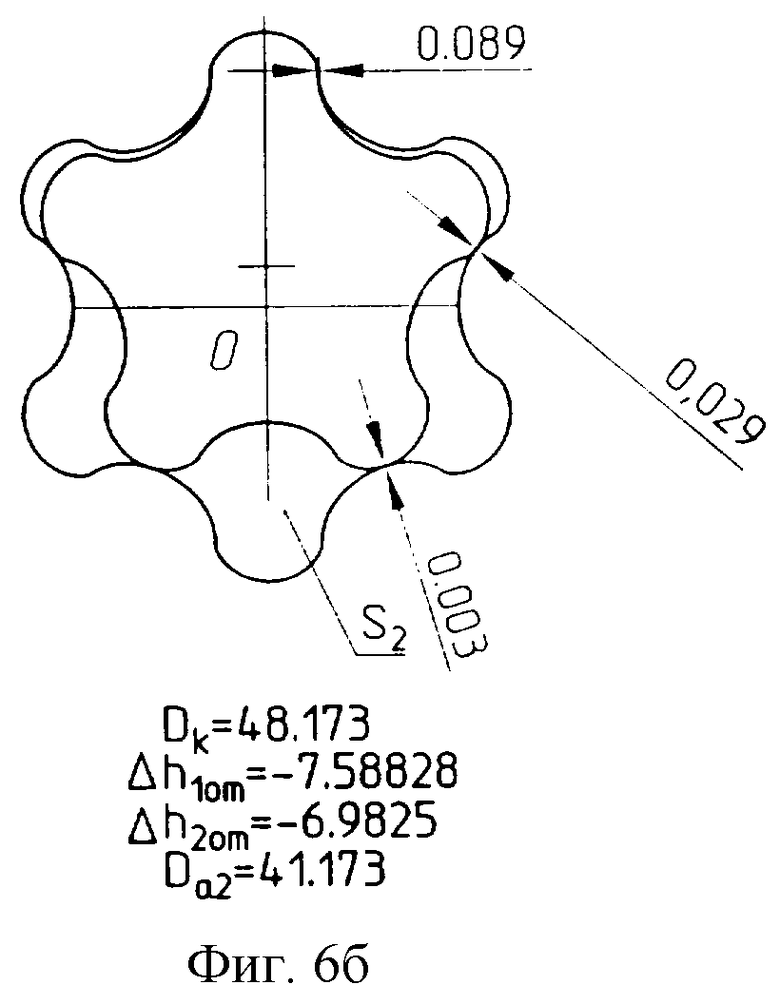
На фиг.6 а, б, в показаны зацепления ГМ и их погрешности в виде боковых натягов (или зазоров, например, на фиг.6в - у головки зуба) для всех зубьев статора и pотора, а - при отсутствии смещения профиля статора: Dk=63,35, Δh1П=0, Δh2П=+0,6125, наружный диаметр ротора Da2=66,3, б - при предельно допустимом отрицательном его смещении ΔhlOT: DK=48,173, Δhloт=-7,58828, Δh2oт=-6,9825, Da2=41,173, в - при предельно допустимом положительном смещении Δh1П: Dk=75,995, Δh1П=+5,1275, Δh2П=+5,7100,Da2=68,995, где Δh1 - смещение профиля статора, Δh2 - смещение профиля ротора. Индексом S обозначен элемент площади проходного сечения для жидкости, причем S2<S1<S3. Индекс "п" относится к положительному смещению, а знак минус и индекс "от" - к отрицательному, индекс 1 относится к профилю статора, а индекс 2 - к профилю ротора.
На фиг.6 приведено также смещение Δh2 профиля ротора. Оно связано со смещением профиля статора соотношением:

где j - диаметральный натяг в зацеплении ГМ, задаваемый на вершине и во впадине профиля ротора.
Предлагаемое изобретение обеспечивает повышение конструктивной гибкости зацепления ГМ и повышение эффективности работы гидродвигателя. Повышение конструктивной гибкости зацепления ГМ происходит за счет оптимизации формы профилей зубьев механизма с обеспечением плавности профилей зубьев механизма при любом числе зубьев статора и ротора путем учета конкретного числа их зубьев. Форма профилей зависит от величин смещения. Величина смещения зависит от конкретного числа зубьев. Учет конкретного числа зубьев ГМ обеспечивается аналитически обоснованным расчетом. Плавность профилей приводит к непрерывности контакта зубьев статора и ротора. Оптимизация формы профилей улучшает контактирование зубьев гидродвигателя. Эффективность работы гидродвигателя повышается за счет оптимизации его технической характеристики, так как рациональный выбор контурного диаметра повышает или крутящий момент, или частоту вращения гидродвигателя в зависимости от требуемой характеристики и контурного диаметра статора.
В прототипе с изменением числа зубьев соотношение (1) должно изменяться, что в прототипе не учтено и при указанных выше числах зубьев приводит к нарушению непрерывности контакта зубьев статора и ротора.
Предложенный героторный механизм представляет собой зубчатую пару с внутренним циклоидообразным зацеплением, содержащим две детали - охватываемый металлический ротор и охватывающий статор с эластичными зубьями, формируемыми в пресс-форме сердечником. Разность чисел зубьев статора и ротора равна единице. Торцовые профили статора и ротора выполнены сопряженными с общим исходным контуром зацепления механизма, представляющим собой рейку с профилем, очерченным эквидистантой укороченной циклоиды, причем исходный контур имеет положительное или отрицательное смещение, перпендикулярное оси механизма, а профили зубьев ротора и статора имеют плавную форму и находятся в непрерывном контакте.
Плавность профилей исключает срезание вершин зубьев ротора или сердечника пресс-формы статора (фиг.1а) и подрезание их впадин (фиг.1б). Срез профиля происходит при недопустимо большом положительном смещении ИКР, а подрез - при недопустимо большом отрицательном смещении. При срезе и подрезе зубьев ротора или статора (сердечника) на их профилях появляются точки изломи А (фиг.1 а, б), которые в математике называют особыми точками. В точке излома радиус кривизны ρд профиля детали (статора или ротора) равен нулю:

где

При подстановке (4) в (3) предельно допустимое смещение ИКР. соответствующее появлению точки излома на профиле детали, определится аналитической зависимостью:

ΔhП.ОТ - положительное и отрицательное смещение ИКР соответственно относительно начальной окружности детали (или от оси ее вращения),
αp - угол профиля ИКР (фиг.2, 3) в текущей точке
rW - радиус начальной окружности детали (фиг.3),
Z - число зубьев статора или ротора,
r - радиус катящейся окружности, образующей нормальную циклоиду ИКР,
L - расстояние от точки М контакта ИКР (фиг.3) с точкой профиля детали до полюса Р зацепления;
Xp - ордината профиля ИКР (фиг.3):

а - радиус окружности, образующей укороченную циклоиду ИКР, равный эксцентриситету зацепления,
rц - расстояние от укороченной циклоиды до каждой точки ИКР,
Ψ - угловой параметр циклоиды, изменяемый в пределах 0...ΨП;
Ψп - граничное значение Ψ, соответствующее точке перегиба П (фиг.2, 3)

ρp - радиус кривизны профиля ИКР в текущей точке
Знак плюс и индекс "п" в зависимости (5) относятся к положительному смещению, знак минус и индекс "от" - к отрицательному. При небольшом уменьшении величин положительного смещения на 0,1....0,3 мм и увеличении отрицательного смещения на эту же величину точка излома исчезает.
Например, рассчитанные по зависимости (5) значения положительного и отрицательного смещения для числа зубьев Z = 6 (для одного из десяти значений чисел зубьев при параметрах ИКР по ОСТ 39-164-84, а=1, r=1,175а, rц=2,175а и изменении параметра Ψ в пределах 0...Ψп) приведены на графике (фиг.4).
Кривая А на графике соответствует положительному смещению ΔhП, которое имеет минимум Δhп=1,80125 при Ψ=Ψэкс=0,28934, а кривая Б соответствует отрицательному смещению, которое имеет максимум ΔhОТ=-2,17891 при Ψ=Ψэкс=0,42482. Положительным считается смещение, когда базовая прямая ИКР (фиг.2) смещена от оси вращения Од статора или ротора и отрицательным - когда к оси.
Эти экстремумы соответствуют наибольшим допустимым смещениям ИКР, исключающим срезание или подрезание профиля детали с числом зубьев Z=6. Предельно допустимые смещения ИКР для других чисел зубьев при a=1 представлены кривыми А и Б на фигуре 5. При значениях a > 1 предельно допустимые смещения увеличиваются в а раз.
Исследование зацепления статора и ротора показало, что наибольшее (предельно) допустимое положительное смещение ИКР ограничивается срезанием вершин зубьев ротора (фиг.1а), а отрицательное - подрезанием профиля впадин статора (фиг.1б).
Для упрощения расчета величин наибольших допустимых смещений ИКР кривые А и Б (фиг.5) заменяются показательными функциями. Тогда наибольшее допустимое положительное и отрицательное смещение ИКР рассчитывается по соотношениям:

Таким образом, минуя трудоемкие исследования по определению предельных смещений по зависимости (5) и графического представления их на фиг.4, 5, исследования сводятся к расчету по простым показательным функциям по зависимостям (2).
При проектировании ГМ обычно задаются так называемым контурным диаметром Dk статора. Его величина должна ограничиваться пределами:

где
Dk - принятый контурный диаметр статора, задаваемый конструктором.
Df1 - номинальный диаметр окружности впадин статора, который определяется по формуле:

Наружный диаметр ротора Da2 определяется зависимостью:

где j - диаметральный натяг в зацеплении ГМ, j = (-0,02...0,08)a.
В случае произвольного задания диаметра Dk величина смещения ИКР для статора определится соотношением:
а для ротора

при этом величины Δh1,2 должны находиться в пределах:

При проектировании ГМ от общего ИКР возникают погрешности зацепления статора и ротора в большинстве случаев в виде натягов на боковых сторонах профиля зубьев при любом смещении ИКР (фиг.6). Погрешности зацепления ограничивают допуском 0,1 мм. Если они превосходят указанный допуск, то величины смещения ΔhП,ОТ следует уменьшить или задать соответствующее значение диаметрального натяга j, который перераспределит или уменьшит погрешности зацепления.
Эти соотношения (2) поясняются фиг. 5:
1. Если
то плавность обеспечивается, подрезы и срезы исчезают, и точка излома К исчезает на фиг.la, 1б, тем самым обеспечивается непрерывность контакта зубьев, а изменения контурного диаметра Dk в соответствии с соотношением (2) ограничены пределами.
2. Если
то профили плавные, на грани появления срезов и подрезов.
3. Если
то плавность нарушается, и возникают срезы и подрезы (фиг.1а, б) с точками излома К, нарушается непрерывность контакта зубьев статора и ротора.
В одном случае лимитирует ротор, а в другом - статор.
Приведем пример 1 расчета Dk при положительном смещении ИКР из условия отсутствия среза профиля зубьев ротора (фиг.6в).
Дано: а=3,5, r=1,175·a=4,1125, h=2a,
rц=2,175·а=7,6125, Df2ном=63,75, Da2ном=56,35.
Для предлагаемого изобретения:
Δh2П=0,73·а·Z =5,71;
=5,71;
Da2=Da2ном+2(Δh2П+r-e)=56,35+2·(5,71+4,1125-3,5)=68,995;
DKmax=Da2+2·a=68,995+2·3,5=75,995.
Для прототипа:
Δh2П=а=3,5;
Da2=Da2ном+2(Δh2П+r-e)=56,35+2·(3,5+4,1125-3,5)=64,57;
DKmax=Da2+2·a=64,575+2·3,5=71,575;
то есть недобор диаметра прототипа на 4.42 мм по сравнению с предлагаемым.
Уменьшение диаметра предельно возможно на 
С увеличением Z этот процент будет увеличиваться, например при Z = 9, увеличение равно 100%, что иллюстрируется на фиг.5.
Приведем пример 2 расчета DК при отрицательном смещении ИКР из условия отсутствия подреза профиля статора (фиг.6б).
Для предлагаемого изобретения:
Δh1ОТ=1,04·а·Z
DKmin=Df1-2Δh1ОТ=63,35-2·7,58828=48,173;
Dа2=DKmin-2a=48,173-2·3,5=41,173.
Для прототипа:
Δh1ОТ=-2а=-7;
DKmin=Df1-2Δh1ОТ=63,35-2·|-2·a|=49,35;
Dа2=DKmin-2a=49,35-2·3,5=42,35.
При сравнении с результатами предлагаемого изобретения DКmin и Da2 получаются больше, но это недопустимо, так как получится срез профиля впадин и статора, ограниченного соотношением:

Таким образом, данные расчеты обосновывают пределы смещения ИКР.
Преимуществом заявляемого героторного механизма является повышение качества его зацепления, исключающего подрезание или срезание профилей статора и ротора путем обоснованного расчета предельно допустимых границ смещения ИКР, учитывающих число зубьев и точность зацепления механизма. Вместе с тем при числе зубьев Z1,2>5 эти границы расширяются в 1,2...2 раза, что повышает конструктивность проектируемого ГМ.
Источники информации
1. ОСТ 39-164-84. Передача зубчатая ротор-статор винтового забойного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2205998C1 |
| ГЕРОТОРНЫЙ ВИНТОВОЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2006 |
|
RU2321768C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2360129C2 |
| ГЕРОТОРНЫЙ ВИНТОВОЙ ГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2006 |
|
RU2321767C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2000 |
|
RU2162926C1 |
| ШАРНИРНОЕ УСТРОЙСТВО | 2002 |
|
RU2235228C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРАВЛИЧЕСКОЙ МАШИНЫ | 2006 |
|
RU2309237C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2202694C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ЗАБОЙНОЙ ГИДРОМАШИНЫ (ВАРИАНТЫ) | 2000 |
|
RU2166603C1 |
| СПОСОБ ОПТИМИЗАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЯ РАБОЧИХ ОРГАНОВ ОДНОВИНТОВОЙ ГИДРОМАШИНЫ | 1998 |
|
RU2150566C1 |



Изобретение относится к зубчатым героторным механизмам и может быть использовано в винтовых гидродвигателях для бурения нефтяных и газовых скважин и в насосах в качестве рабочих органов. Героторный механизм содержит зубчатую пару ротор-статор с внутренним циклоидообразным зацеплением, зубья которых находятся в непрерывном контакте. Смещение общего исходного контура зацепления устанавливается с учетом различия в числах его зубьев по соотношениям:
а наибольшие допустимые значения контурного диаметра статора равны:

где ΔhП, ΔhОТ - наибольшие допустимые положительные и отрицательные смещения исходного контура зацепления соответственно;
а - эксцентриситет зацепления,
Z1-2 - число зубьев статора и ротора соответственно,
Df1 - диаметр окружности впадин статора при отсутствии смещения.
Технический результат – обеспечение плавности профилей зубьев рабочих органов механизма и повышение его конструктивной гибкости за счет аналитически обоснованного расширения границ смещения исходного контура зацепления и контурного диаметра статора. 6 ил.
Героторный механизм винтовой гидромашины, содержащий статор и эксцентрично расположенный в нем охватываемый ротор, зубья которых находятся в непрерывном контакте и имеют разницу их чисел, равную единице, торцовые профили статора и ротора образованы общим исходным контуром рейки (зацепления) со смещением, а профиль этого контура очерчен эквидистантой укороченной циклоиды, отличающийся тем, что наибольшее допустимое положительное и наибольшее допустимое отрицательное смещения исходного контура рейки задано с выполнением соотношений

а допустимое значение контурного диаметра ограничено пределами:

где
ΔhП, ΔhОТ - наибольшее допустимое положительное и наибольшее допустимое отрицательное смещения соответственно исходного контура рейки;
Dkmax, Dkmin - наибольшее и наименьшее значения контурного диаметра;
а - эксцентриситет зацепления механизма;
Z1,2 - число зубьев статора и ротора соответственно;
Dfl - номинальный диаметр впадин статора при отсутствии смешения исходного контура, который задают по формуле

где Z2 - число зубьев ротора;
r - радиус катящейся окружности, образующей нормальную циклоиду исходного контура рейки;
rц - расстояние от укороченной циклоиды до точек профиля исходного контура рейки.
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2000 |
|
RU2162926C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ЗАБОЙНОЙ ГИДРОМАШИНЫ (ВАРИАНТЫ) | 2000 |
|
RU2166603C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2205998C1 |
| Устройство для циркуляционного вакуумирования жидкого металла | 1968 |
|
SU286760A1 |
| EP 0573019 A2, 29.07.1992. | |||

