Изобретение относится к электротехнике, а точнее к способам управления индукторным двигателем, имеющим зубчатый статор, на котором расположены несколько фазных обмоток, каждая из которых запитывается однополярным током от полумостового инвертора напряжения, и зубчатый безобмоточный ротор.
Известен способ управления индукторным двигателем (см. патент США №4616165 от 7.10.1986).
В данном источнике описан индукторный двигатель с системой управления, реализующей способ управления, заключающийся в формировании токов в фазных обмотках двигателя путем подачи на обмотку импульсов напряжения внутри каждого периода датчика положения ротора, причем интервалы времени, определяющие моменты начала и окончания подачи напряжения, задаются как функции частоты вращения двигателя табличным способом.
Недостатком данного способа является ограниченная область применения, дающая возможность использовать данный способ только для управления индукторным двигателем при настройке на один или несколько режимов вращения.
Наиболее близким к заявленному является способ управления индукторным двигателем, описанный в патенте США №4707650 от 17.11.1987 г. Данный способ реализован посредством системы управления, включающей в себя контур регулирования скорости по обратной связи. В данной системе формирование токов в фазных обмотках также производится путем подачи на обмотку импульсов напряжения внутри каждого периода датчика положения ротора. При этом заданное значение угловой скорости вращения двигателя сравнивается с реальным значением скорости вращения, полученной с использованием сигнала датчика положения ротора. Сигнал рассогласования заданной и действительной скорости вращения используется в регуляторе уставки фазного тока. При этом уставка регулируется таким образом, чтобы осуществить стабилизацию угловой скорости вращения двигателя.
Недостатком описанного способа является ограниченная область применения, т.е. он может быть использован для управления индукторным двигателем только в режиме вращения. В системах слежения, где требуется не только вращательное движение ротора, но и поворот ротора на малый, строго определенный угол, применение данного способа невозможно, т.к. он использует импульсное формирование фазных токов по сигналам датчика положения ротора, что обязательно приведет к вращению ротора двигателя. Остановка же двигателя при использовании этого способа происходит путем снятия питающего напряжения, в результате чего ротор двигателя остановится в любом произвольном положении, что неприемлемо в системах слежения.
Изобретение направлено на расширение области применения способа управления индукторным двигателем.
Для этого в способе управления индукторным двигателем, заключающемся в том, что токи в фазах двигателя формируют путем подачи на фазную обмотку импульсов напряжения в течение каждого периода датчика положения ротора, уставку фазного тока определяют по сигналу рассогласования заданной и действительной угловой скорости вращения ротора, дополнительно вводят режим точной установки ротора, при котором токи формируют одновременно в двух соседних фазах, одна из которых является тяговой, а вторая - тормозящей. При этом при повороте ротора двигателя от согласованного положения «Зубец ротора - Зубец статора» для фазы, которая является на данном участке тормозящей, до согласованного положения «Зубец ротора - Зубец статора» для фазы, которая является на данном участке тяговой, ток в тормозящей фазе изменяют от максимального значения до нуля, ток в тяговой фазе - от нуля до максимального значения, по соотношению токов в фазах определяют угловое положение ротора на данном участке, а момент переключения из режима вращения в режим точной установки определяют по сигналам дополнительного датчика абсолютного углового положения ротора.
Использование предлагаемого способа для управления индукторным двигателем, работающим в следящей системе, подразумевает наличие двух режимов работы: режима вращения и режима точной установки. При управлении двигателем в режиме вращения для формирования уставок фазных токов в качестве заданной скорости используется не постоянная величина, определяющая постоянную скорость вращения, как это сделано в прототипе, а определенный закон, обеспечивающий максимальное нарастание скорости в начале движения и уменьшение скорости к моменту переключения в режим точной установки до величины, обеспечивающей движение ротора до остановки в заданном положении без перерегулирования. Момент переключения в режим точной установки определяют по сигналам дополнительного датчика абсолютного углового положения ротора. Переключение происходит при определенной величине рассогласования между заданным и действительным угловым положением ротора.
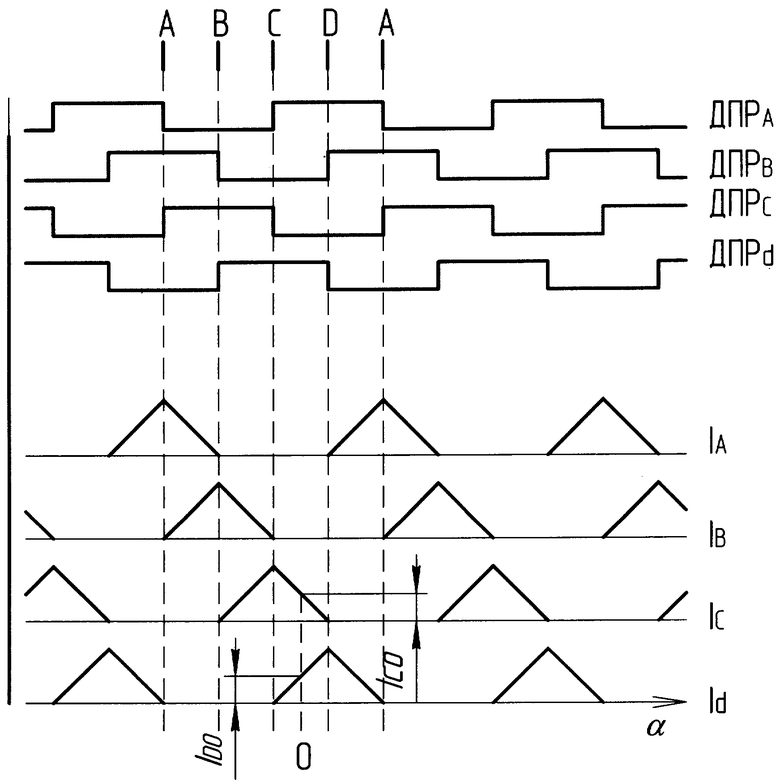
На чертеже представлен участок диаграммы формирования токов в фазах в режиме точной установки в соответствии с сигналами датчика положения ротора на примере четырехфазного индукторного двигателя. Здесь:
- ДПРа, ДПРв, ДПРс, ДПРd - сигналы датчика положения ротора индукторного двигателя для фаз А, В, С, D соответственно;
- Ia, Iв, Ic, Id - токи в фазах А, В, С, D соответственно;
- А, В, С, D - точки положения ротора, соответствующие согласованным положениям «Зубец ротора - Зубец статора» фаз А, В, С, D;
- О - точка текущего положения ротора на участке между фазами С и D;
- ICO, IDO - токи в фазах С и D, соотношение которых определяет положение ротора в точке О;
- α - ось углового положения ротора двигателя.
Поворот ротора производится следующим образом. Когда ток в фазе С имеет максимальное значение, а токи в соседних фазах В и D равны нулю, ротор занимает согласованное положение «Зубец ротора - Зубец статора» фазы С. При уменьшении значения тока в фазе С и одновременном увеличении тока в фазе D, ротор начнет поворачиваться, совершая перемещение в направлении согласованного положения «Зубец ротора - Зубец статора» фазы D.
Следует отметить, что на чертеже, для упрощения, изменение токов представлено линейным, однако в реальном устройстве ток для каждой фазы формируется посредством широтно-импульсного регулирования силовыми ключами инвертора напряжения по определенному закону, обеспечивающему равномерность поворота ротора двигателя. При необходимости остановить ротор в любом требуемом положении, токи в фазах в данной точке должны иметь определенное соотношение (величины ICO, IDO в точке О на чертеже).
Уставки токов на каждом участке в режиме точной установки определяются по сигналам от дополнительного датчика абсолютного углового положения ротора табличным способом. Для этого по значению выходного сигнала датчика формируется адресный сигнал выборки необходимых величин уставок фазных токов из постоянного запоминающего устройства.
В зависимости от направления движения ротора фаза в конкретном положении ротора может быть как тяговой (движение к согласованному положению «Зубец ротора - Зубец статора» для этой фазы), так и тормозящей (движение от согласованного положения «Зубец ротора - Зубец статора» для этой фазы).
Таким образом, предложенный способ управления индукторным двигателем в результате введения дополнительного режима точной установки ротора с формированием токов одновременно в двух соседних фазах имеет более широкую область применения, позволяя использовать индукторный двигатель не только в тех случаях, где требуется простой вращательный режим со стабилизацией скорости, но и, например, в системах слежения и наведения, где необходим поворот ротора на любой, в том числе и малый угол, и остановка ротора с фиксацией в любом положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2372708C1 |
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2158692C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОМЕНТА ИНДУКТОРНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2001 |
|
RU2212755C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2276451C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2004 |
|
RU2282300C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| ТРЕХФАЗНЫЙ РЕАКТИВНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МАЛЫМИ ПУЛЬСАЦИЯМИ МОМЕНТА | 1999 |
|
RU2153218C1 |
Изобретение относится к области электротехники и может быть использован при управлении индукторным двигателем, имеющим зубчатый статор, на котором расположены несколько фазных обмоток, каждая из которых запитывается однополярным током от полумостового инвертора напряжения, и зубчатый безобмоточный ротор. В способе управления токи в фазах двигателя формируют путем подачи на фазную обмотку импульсов напряжения в течение каждого периода датчика положения ротора. Уставку фазного тока определяют по сигналу рассогласования заданной и действительной угловой скорости вращения ротора. Дополнительно вводят режим точной установки ротора, при котором токи формируют одновременно в двух соседних фазах, одна из которых является тяговой, а вторая - тормозящей. При повороте ротора двигателя от согласованного положения «Зубец ротора - зубец статора» для фазы, которая является на данном участке тормозящей, до согласованного положения «Зубец ротора - зубец статора» для фазы, которая является на данном участке тяговой, ток в тормозящей фазе изменяют от максимального значения до нуля, ток в тяговой фазе - от нуля до максимального значения. По соотношению токов в фазах определяют угловое положение ротора на данном участке, а момент переключения из режима вращения в режим точной установки определяют по сигналам дополнительного датчика абсолютного углового положения ротора. 1 ил.
Способ управления индукторным двигателем, заключающийся в том, что токи в фазах двигателя формируют путем подачи на фазную обмотку импульсов напряжения в течение каждого периода датчика положения ротора, уставку фазного тока определяют по сигналу рассогласования заданной и действительной угловой скорости вращения ротора, отличающийся тем, что дополнительно вводят режим точной установки ротора, при котором токи формируют одновременно в двух соседних фазах, одна из которых является тяговой, а вторая - тормозящей, при этом при повороте ротора двигателя от согласованного положения «Зубец ротора - Зубец статора» для фазы, которая является на данном участке тормозящей, до согласованного положения «Зубец ротора - Зубец статора» для фазы, которая является на данном участке тяговой, ток в тормозящей фазе изменяют от максимального значения до нуля, ток в тяговой фазе - от нуля до максимального значения, по соотношению токов в фазах определяют угловое положение ротора на данном участке, а момент переключения из режима вращения в режим точной установки определяют по сигналам дополнительного датчика абсолютного углового положения ротора.
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТОКА В ФАЗНЫХ ОБМОТКАХ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2229768C2 |
| Вентильный электропривод | 1987 |
|
SU1522371A1 |
| СПОСОБ ЗАЩИТЫ ДОКУМЕНТОВ ИЛИ ЦЕННЫХ ОБЪЕКТОВ | 2000 |
|
RU2167253C1 |
| US 4933621 А, 12.01.1990 | |||
| СПОСОБ ПРОИЗВОДСТВА СУХОЙ СМЕСИ ДЛЯ ДЕТСКОГО ПИТАНИЯ | 2003 |
|
RU2272519C2 |
| DE 4314211 A1, 03.11.1994 | |||
| Катковый гусеничный движитель | 1973 |
|
SU472052A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |

