Изобретение относится к способам управления индукторными двигателями, в том числе тяговыми, имеющими зубчатый статор и ротор.
Известен способ управления индукторным двигателем, заключающийся в том, что формируют фазные токи, для чего измеряют периоды датчика положения ротора (ДПР) и внутри этого периода подают импульсы питающего двигатель напряжения в интервале от нуля до 180 электрических градусов на фазные обмотки двигателя (см. Электровозостроение: сб. науч. тр. ОАО "Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения" (ОАО "ВЭлНИИ") - 2000. Т.42. - 324 с. на с.187, рис.1).
При таком способе регулирования в интервалах от нуля эл.град. до 180/m эл.град. и от (180-180/m) эл.град. до 180 эл.град. (m - число фаз двигателя) под током находятся две фазы индукторного двигателя одновременно. Мгновенный результирующий электромагнитный момент индукторного двигателя определяется суммой моментов отдельных фаз, находящихся под током одновременно. На интервале работы двух фаз происходит "всплеск" в кривой результирующего момента (см. журнал "Электричество" №10/2001 на с.34, рис.1б).
Наиболее близким по технической сущности является способ управления индукторным двигателем, заключающийся в том, что формируют токи в фазах двигателя, для чего измеряют периоды датчика положения ротора двигателя, подают импульсы питающего двигатель напряжения в интервале от нуля до 180 эл.град. на фазные обмотки двигателя, отслеживая заданное значение фазного тока, способом "токовый коридор" (см. Электровозостроение: сб. науч. тр. ОАО "Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения" (ОАО "ВЭлНИИ") - 2002. Т.44. - 336 с. на с.106, рис.2 и журнал "Электротехника" №6/98 на с.25-26, рис.2в и 4б).
Высокая частота и амплитуда пульсации результирующего момента могут стать главной причиной усталостных разрушений элементов тяговой передачи (см. книгу Бирюкова И.В., Беляева А.И., Рыбникова Е.К. Тяговые передачи электроподвижного состава железных дорог. - М.: Транспорт. 1986. - 256 с. на с.119).
Кроме того, пульсации момента приводят к вибрациям, шуму, а также могут препятствовать нормальному пуску тягового электропривода.
Задачей изобретения является снижение пульсаций момента за счет согласованного формирования фазных токов таким образом, чтобы сумма моментов, отдельных фаз, находящихся под током одновременно, обеспечивала снижение "всплеска" в кривой результирующего момента.
Поставленная задача решается способом управления индукторным двигателем по первому варианту за счет согласованного формирования "траектории" сигналов верхней и нижней уставок фазного тока "токового коридора", внутри периода ДПР подают импульсы питающего двигатель напряжения в интервале от нуля до 180 эл.град. на фазные обмотки двигателя, отличающийся тем, что ток фазы увеличивают в зоне провала результирующего момента.
"Траекторию" сигналов верхней и нижней уставок фазного тока "токового коридора" получают в результате сравнения синусоидального модулирующего сигнала двойной частоты, определяющего желаемый вид токовой уставки, который отстает относительно фронта ДПР и смещен относительно нуля в положительную область, с сигналом, соответствующим минимальному значению "токового коридора" по выражению:
где Imin - сигнал, соответствующий минимальному значению "токового коридора";
FIm(t)=(Asin(2ωnt-ϕ-α)+k)·Imax - синусоидальный модулирующий сигнал;
A - амплитуда модулирующего сигнала;
ωn=2πfn - частота модулирующего сигнала;
fn - частота фазного тока;
k - коэффициент, учитывающий отклонение FIm относительно нуля;
α - угол, характеризующий опережающее включение фазы относительно фронта ДПР;
ϕ - угол, характеризующий смещение модулирующего сигнала относительно фронта ДПР;
Imax - максимальное значение фазного тока.
По второму варианту поставленная задача решается способом управления индукторным двигателем за счет согласованного формирования "траектории" сигналов верхней и нижней уставок фазного тока "токового коридора", внутри периода ДПР подают импульсы питающего двигатель напряжения в интервале от нуля до 180 эл.град. на фазные обмотки двигателя, отличающимся тем, что ток фазы уменьшают в зоне возрастания результирующего момента.
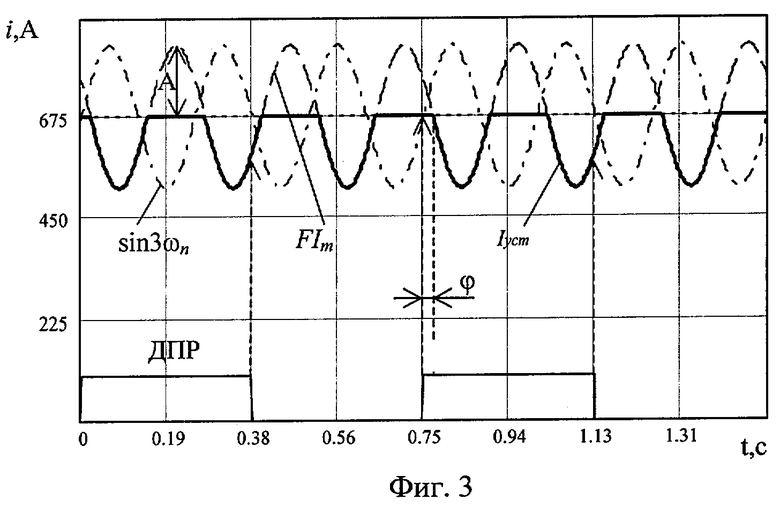
"Траекторию" сигналов верхней и нижней уставок фазного тока "токового коридора" получают в результате сравнения синусоидального модулирующего сигнала тройной частоты, определяющего желаемый вид токовой уставки, который отстает относительно фронта ДПР и смещен относительно нуля в положительную область, с сигналом, соответствующим максимальному значению "токового коридора" по выражению:

где Imax - сигнал, соответствующий максимальному значению "токового коридора";
FIm(t)=(-Asin(3ωnt-ϕ-α)+k)·Imax - синусоидальный модулирующий сигнал;
А - амплитуда модулирующего сигнала;
ωn=2πfn - частота модулирующего сигнала;
fn - частота фазного тока;
k - коэффициент, учитывающий отклонение FIm относительно нуля;
α - угол, характеризующий опережающее включение фазы относительно фронта ДПР;
ϕ - угол, характеризующий смещение модулирующего сигнала относительно фронта ДПР.
Ток в момент совпадения оси паза ротора с осью зубца статора (фронт сигнала ДПР), достигнув уровня модулирующей уставки тока, поддерживают на этом уровне до того момента, пока система управления одновременно не отработает 180 электрических градусов и не подаст управляющие импульсы на закрытие обоих транзисторов фазы (спадающий фронт сигнала ДПР).
Предлагаемый способ управления индукторным двигателем путем согласованного формирования "траектории" сигналов верхней и нижней уставок фазного тока "токового коридора" во всех фазах двигателя на интервале от нуля до 180 электрических градусов позволяет снизить пульсации результирующего момента.
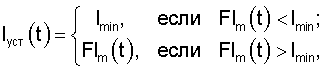
На фиг.1 показаны фазные ток, напряжение, момент и результирующий момент тягового двигателя НТИ-350 при способе управления, описанном в прототипе.
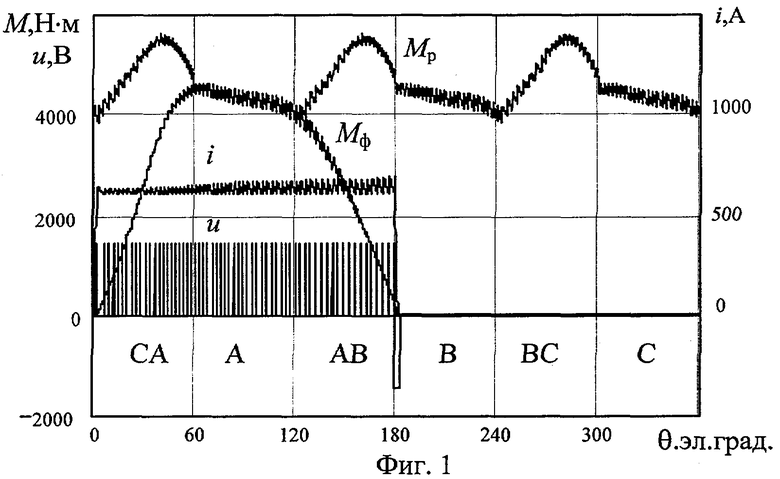
На фиг.2 показана диаграмма первого варианта, поясняющая получение "траектории" сигнала фазного тока.
На фиг.3 показана диаграмма второго варианта, поясняющая получение "траектории" сигнала фазного тока.
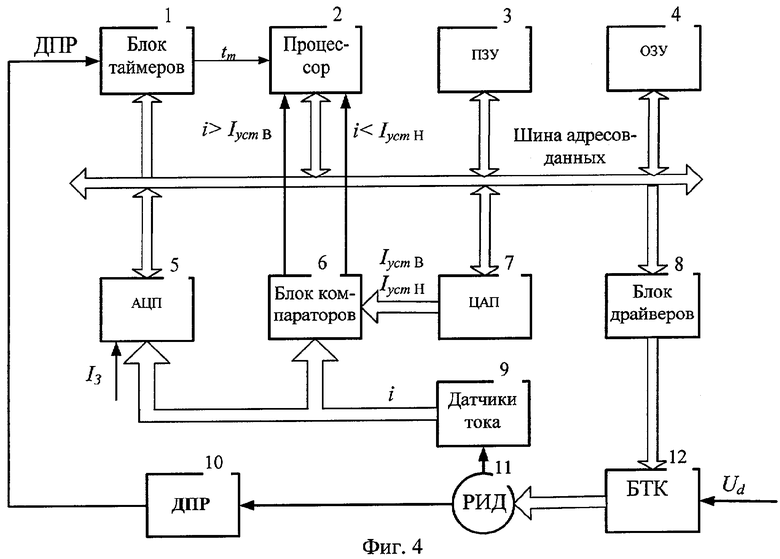
На фиг.4 - устройство для реализации предлагаемого способа.
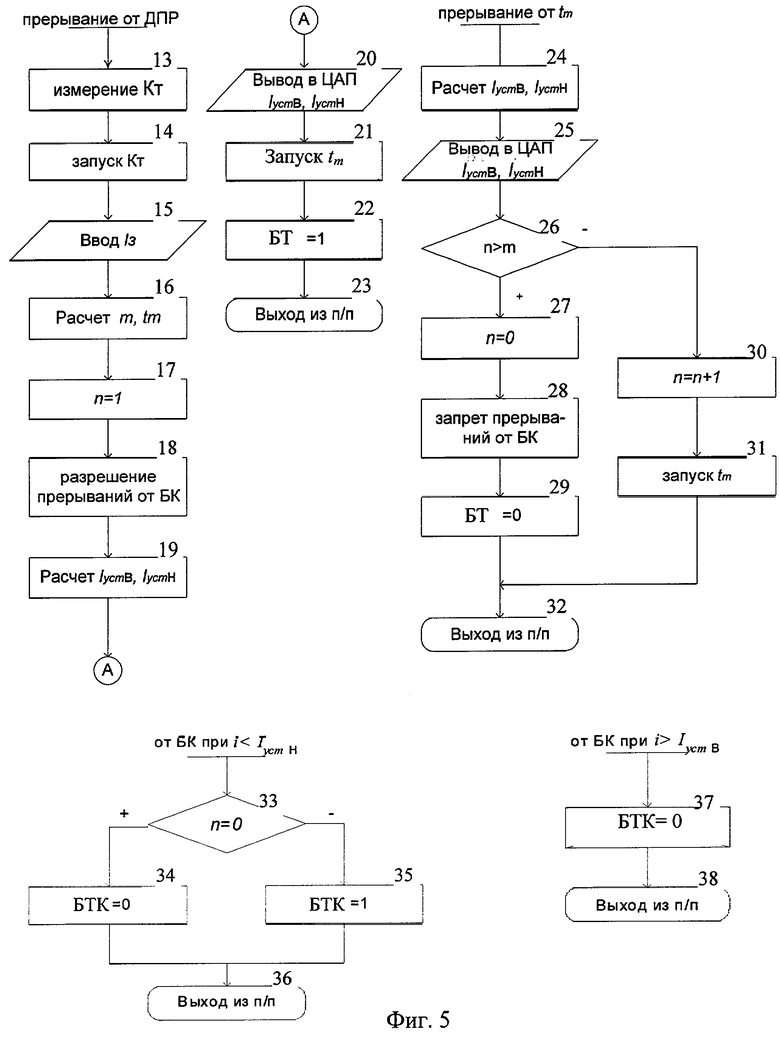
На фиг.5 - алгоритм, реализующий способ управления.
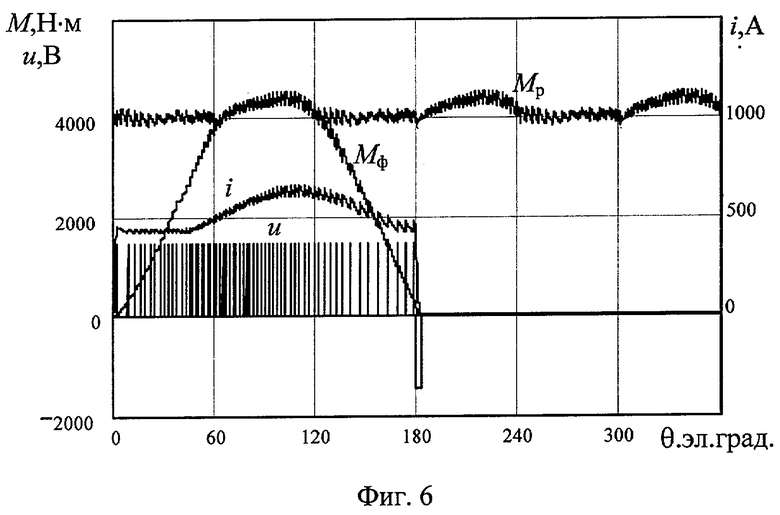
На фиг.6 показаны фазные ток, напряжение, момент и результирующий момент тягового двигателя НТИ-350 при реализации первого варианта предлагаемого способа.
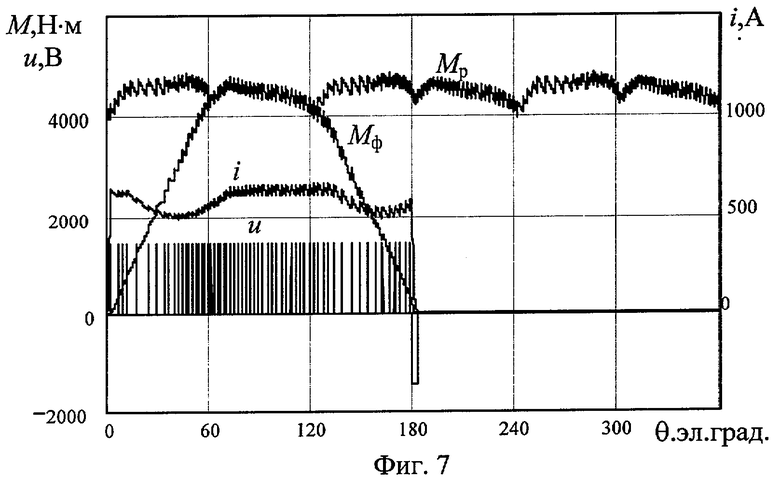
На фиг.7 показаны фазные ток, напряжение, момент и результирующий момент тягового двигателя НТИ-350 при реализации второго варианта предлагаемого способа.
Способ осуществляют микропроцессорной системой, приведенной на фиг.3, состоящей из блока таймеров (БТ) 1, процессора (Пр) 2, постоянного запоминающего устройства (ПЗУ) 3, оперативного запоминающего устройства (ОЗУ) 4, аналого-цифрового преобразователя (АЦП) 5, блока компараторов (БК) 6, блока цифроаналогового преобразователя (ЦАП) 7, блока драйверов (БД) 8, блока транзисторных ключей (БТК) 12, управляющего индукторным двигателем (ИД) 11, снабженным датчиками тока (ДТ) 9 и датчиками положения ротора (ДПР) 10. Входы-выходы Пр 2, ПЗУ 3, ОЗУ 4, входы БТ 1, ЦАП 7, БД 8, выход АЦП 5 объединены шиной адресов - данных 13. Выход БТ 1, БК 6 и ДПР соединены с шинами прерывания процессора 2. Датчики тока 9 включены в цепи фазных обмоток двигателя 11. Токи двигателя i с ДТ 9 поступают на входы АЦП 5 и первые входы БК 6, на вторые входы которого поступают сигналы Iуств - (верхний уровень уставки), Iустн - (нижний уровень уставки) с блока ЦАП 7. Задание тока Iз поступает на другой вход АЦП 5. Выход БД 8 соединен с входом БТК 12. Выходы БТК 12, запитанного постоянным напряжением Ud, нагружены на обмотки индукторного двигателя 11.
Процессор 2, ОЗУ 4, ПЗУ 3, БТ 1 и многоканальный АЦП 5 могут быть интегрированы в специализированный высокопроизводительный сигнальный микроконтроллер, например, TMS320LF2407 (Процессоры цифровой обработки сигналов фирмы Texas Instruments. // ЗАО "SCAN Инжиниринг-телеком", М., 2000 г., стр.31). В качестве ЦАПов могут быть использованы многоканальные ЦАП, например это 8-канальный 10-разрядный ЦАП AD7808 (Электронные компоненты. Ноябрь 2003 г., "Элтех", С.-Петербург 2003, стр.76).
Способ реализуется алгоритмом, приведенным на фиг.4. На фиг.2 приведена диаграмма, поясняющая работу устройства по данному алгоритму.
Алгоритм состоит из 4 подпрограмм, которые запускают сигналами прерываний от ДПР 10, БТ 1 и блока компараторов БК 6. Первая подпрограмма начинается по фронту сигнала от ДПР 10. Считывается значение кода таймера КT (блок 13), соответствующее значению периода сигнала ДПР 10 и снова запускается на измерение до прихода следующего фронта от датчика ДПР 10. В блоке 15 вводят через АЦП 5 заданное значение тока Iз. В блоке 16 определяют количество интервалов "m" (количество интервалов повторения определения), период их изменения tm и формируют "траекторию" сигналов верхней и нижней уставок фазного тока "токового коридора" таким образом, что ток фазы увеличивают в зоне провала результирующего момента. В блоке 17 устанавливают начальное значение счетчика номера интервала, которому присваивается значение единицы. Блок 18 разрешает прерывания БК 6. В блоках 19, 20 производят определение "траектории" верхней Iуств и нижней границы Iустн сигналов уставок фазного тока "токового коридора", которые получают в результате сравнения синусоидального модулирующего сигнала двойной частоты, который отстает относительно фронта ДПР и смещен относительно нуля в положительную область, с сигналом, соответствующим минимальному значению "токового коридора" по выражению:
где Imin - сигнал, соответствующий минимальному значению "токового коридора";
FIm(t)=(Asin(2ωnt-ϕ-α)+k)·Imax - синусоидальный модулирующий сигнал;
А - амплитуда модулирующего сигнала;
ωn=2πfn - частота модулирующего сигнала;
fn - частота фазного тока;
k - коэффициент, учитывающий отклонение FIm относительно нуля;
α - угол, характеризующий опережающее включение фазы относительно фронта ДПР;
ϕ - угол, характеризующий смещение модулирующего сигнала относительно фронта ДПР;
Imax - максимальное значение фазного тока.
Во втором варианте в блоке 16 определяют количество интервалов "m", период их изменения tm и формируют "траекторию" сигналов верхней и нижней уставок фазного тока "токового коридора" таким образом, что ток фазы уменьшают в зоне возрастания результирующего момента. В блоке 17 устанавливают начальное значение счетчика номера интервала, которому присваивается значение единицы. Блок 18 разрешает прерывания БК 6. В блоках 19, 20 производят определение "траектории" верхней Iуств и нижней границы Iустн сигналов уставок фазного тока "токового коридора", которые получают в результате сравнения синусоидального модулирующего сигнала тройной частоты, который отстает относительно фронта ДПР и смещен относительно нуля в положительную область, с сигналом, соответствующим максимальному значению "токового коридора" по выражению:
где Imax - сигнал, соответствующий максимальному значению "токового коридора";
FIm(t)=(-Asin(3ωnt-ϕ-α)+k)·Imax - синусоидальный модулирующий сигнал;
А - амплитуда модулирующего сигнала;
ωn=2πfn - частота модулирующего сигнала;
fn - частота фазного тока;
k - коэффициент, учитывающий отклонение FIm относительно нуля;
α - угол, характеризующий опережающее включение фазы относительно фронта ДПР;
ϕ - угол, характеризующий смещение модулирующего сигнала относительно фронта ДПР.
После чего и в первом и во втором варианте осуществляют вывод этих значений в блок ЦАП 7. Далее запускают таймер tm (блок 21) и подают управление на БТК 12 (блок 22), подающего напряжение на рабочую фазу двигателя 11, после чего осуществляют выход из подпрограммы.
Таймером tm периодически формируют сигнал прерывания, по которому выполняют вторую подпрограмму, задающую "траекторию" сигнала уставки и границы "токового коридора" фазного тока рабочей обмотки. В блоке 24 производят определения текущих координат границ коридора тока Iуств, Iустн, которые выводят в блок ЦАП 7. В блоке 25 осуществляют проверку прохождения всей "траектории" фазного тока, проверяют, если номер текущей координаты не равен конечному m, то переходят к следующей, увеличивая счетчик n и перезапуская таймер tm (блоки 30, 31). При достижении конечной координаты обнуляют счетчик, запрещают прерывания от БК 6 и снимают управление с БТК 12 (блоки 27, 28, 29).
Подают импульсы напряжения на рабочую фазную обмотку двигателя в интервале от нуля до 180 эл.град., что вызывает нарастание тока в ней, которое измеряют датчиком фазного тока ДТ 9. Сигнал с ДТ 9 поступает на первые входы блока компараторов, на вторые входы которого поступают сигналы с блока ЦАП 7 Iуств, Iустн. При превышении фазного тока i верхнего уровня Iуств в БК 6 формируют сигнал прерывания i>Iуств. По сигналу прерывания от БК 6 начинает выполняться подпрограмма i>Iуств, в которой с БТК 12 снимают управление и осуществляют выход из подпрограммы. При этом фазный ток двигателя начинает уменьшаться. Когда фазный ток i станет меньше нижней границы Iустн "токового коридора" в БК 6 формируют прерывание i<Iустн, по которому начинает выполняться другая подпрограмма, которая подает управление на БТК 12. При этом фазный ток начинает нарастать и удерживается в границах "токового коридора". В подпрограмме осуществляют дополнительную проверку счетчика текущей координаты траектории "токового коридора", если он сброшен, то снимают управление с БТК 12. Текущий фазный ток двигателя контролируют АЦП 5 при каждом изменении координаты траектории "токового коридора".
Современная элементная база обладает достаточной производительностью и разрядностью для реализации данного способа управления с высокой точностью.
Пульсации момента тягового трехфазного реактивного индукторного двигателя снижены при реализации заявляемого способа управления с 15% до 3% за счет формирования специального сигнала уставки фазного тока таким образом, чтобы сумма моментов, развиваемых этими фазами, находящимися под током одновременно, обеспечивала снижение "всплеска" в кривой результирующего момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2276451C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2294049C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2251788C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОМЕНТА ТЯГОВОГО ИНДУКТОРНОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2315419C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2372708C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2314634C2 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2297091C2 |
Изобретение относится к электротехнике и может быть использовано в электроподвижном составе. Техническим результатом является снижение пульсаций момента. В способе управления индукторным двигателем траекторию сигналов верхней и нижней уставок фазного тока "токового коридора" получают в результате сравнения синусоидального модулирующего сигнала двойной частоты, определяющего желаемый вид токовой уставки, который отстает относительно фронта ДПР и смещен относительно нуля в положительную область, с сигналом, соответствующим минимальному значению "токового коридора", либо "траекторию" сигналов верхней и нижней уставок фазного тока "токового коридора" получают в результате сравнения синусоидального модулирующего сигнала тройной частоты, определяющего желаемый вид токовой уставки, который отстает относительно фронта ДПР и смещен относительно нуля в положительную область, с сигналом, соответствующим максимальному значению "токового коридора". В результате за счет согласованного формирования фазных токов таким образом, чтобы сумма моментов отдельных фаз, находящихся под током одновременно, обеспечивала снижение «всплеска» в кривой результирующего момента, снижаются пульсации момента. 2 н.п. ф-лы, 7 ил.
где Imin - сигнал, соответствующий максимальному значению "токового коридора";
FIm(t)=(-Asin(Зωnt-ϕ-α)+k)·Imax - синусоидальный модулирующий сигнал;
А - амплитуда модулирующего сигнала;
ωn=2πfn - частота модулирующего сигнала;
fn - частота фазного тока;
k - коэффициент, учитывающий отклонение FIm относительно нуля;
α - угол, характеризующий опережающее включение фазы относительно фронта ДПР;
ϕ - угол, характеризующий смещение модулирующего сигнала относительно фронта ДПР;
Imax - максимальное значение фазного тока.

где Imax - сигнал, соответствующий максимальному значению токового коридора";
FIm(t)=(-Asin(Зωnt-ϕ-α)+k)·Imax - синусоидальный модулирующий сигнал;
А - амплитуда модулирующего сигнала;
ωn=2πfn - частота модулирующего сигнала;
fn - частота фазного тока;
k - коэффициент, учитывающий отклонение FIm относительно нуля;
α - угол, характеризующий опережающее включение фазы относительно фронта ДПР;
ϕ - угол, характеризующий смещение модулирующего сигнала относительно фронта ДПР.
| Электровозостроение | |||
| Сб | |||
| науч | |||
| трудов ОАО "Всероссийский научно-исследовательский и проектно-конструкторский институт электровозостроения" | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2046517C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТОКА В ФАЗНЫХ ОБМОТКАХ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2229768C2 |
| Вентильный электропривод | 1987 |
|
SU1522371A1 |
| СПОСОБ ЗАЩИТЫ ДОКУМЕНТОВ ИЛИ ЦЕННЫХ ОБЪЕКТОВ | 2000 |
|
RU2167253C1 |
| US 4647802 A, 03.03.1987 | |||
| US 5015939, 14.05.1991 | |||
| DE 3826892 A, 16.02.1989 | |||
| Способ определения координаты трещины при испытаниях металлических конструкций | 1978 |
|
SU872949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

