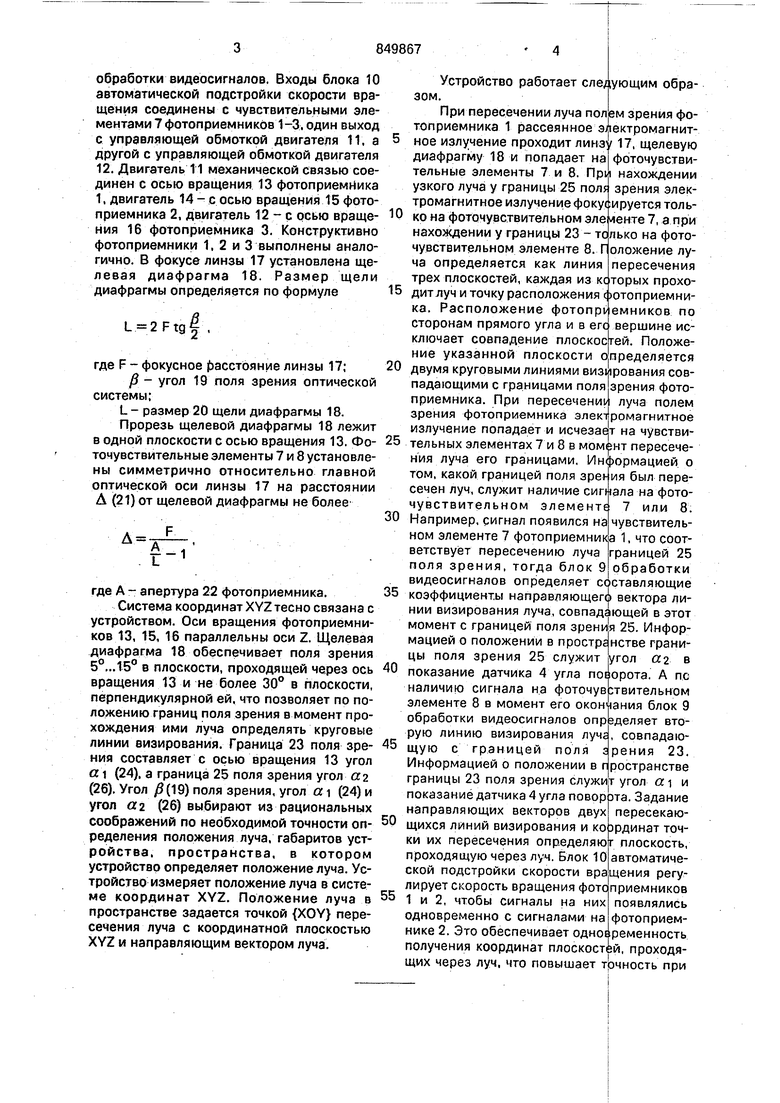
обработки видеосигналов. Входы блока 10 автоматической подстройки скорости вращения соединены с чувствительными элементами 7 фотоприемникбв 1-3. один выход с управляющей обмоткой двигателя 11, а другой с управляющей обмоткой двигателя 12. Двигатель 11 механической связью соединен с осью вращения 13 фотоприемИика 1. двигатель 14 - с осью вращения 15 фотоприемника 2, двигатель 12 - с осью вращения 16 фотоприемника 3. Конструктивно фотоприемники 1. 2 и 3 выполнены аналогично. В фокусе линзы 17 установлена щелевая диафрагма 18. Размер щели диафрагмы определяется по формуле
L 2Ftg|,
где F - фокусное расстояние линзы 17;
- угол 19 поля зрения оптической системы;
L- размер 20 щели диафрагмы 18.
Прорезь щелевой диафрагмы 18 лежит в одной плоскости с осью вращения 13. Фоточувствительные элементы 7 и 8 установлены симметрично относительно главной оптической оси линзы 17 на расстоянии А (21) от щелевой диафрагмы не более
fЛ
f-1
где А - апертура 22 фотоприемника.
Система координат XYZтесно связана с устройством. Оси вращения фотоприемников 13, 15, 16 параллельны оси Z. Щелевая диафрагма 18 обеспечивает поля зрения 5°...15° в плоскости, проходящей через ось вращения 13 и не более 30 в плоскости, перпендикулярной ей, что позволяет по положению границ поля зрения в момент прохождения ими луча определять круговые линии визирования. Граница 23 поля зрения составляет с осью вращения 13 угол а 1 (24), а граница 25 поля зрения угол ач (26). Угол /8(19) поля зрения, угол a (24) и угол а2 (26) выбирают из рациональных соображений по необходимой точности определения положения луча, габаритов устройства, пространства, в котором устройство определяет положение луча. Устройство измеряет положение луча в системе координат XYZ. Положение луча в пространстве задается точкой {XOY) пересечения луча с координатной плоскостью XYZ и направляющим вектором луча.
Устройство работает следующим образом.
При пересечении луча пол|ем зрения фотоприемника 1 рассеянное электромагнитное излучение проходит линз7 17, щелевую диафрагму 18 и попадает на фоточувствительные элементы 7 и 8. При нахождении узкого луча у границы 25 пол зрения электромагнитное излучение фокусируется только на фоточувствительном эле И1енте 7, а при нахождении у границы 23 - только на фоточувствительном элементе 8. Голожение луча определяется как линия пересечения трех плоскостей, каждая из кс торых проходит луч и точку расположения ботоприемника. Расположение фотопр /емников по сторонам прямого угла и в егс вершине исключает совпадение плоскостей. Положение указанной плоскости определяется
0 двумя круговыми линиями визирования совпадающими с границами поля зрения фотоприемника. При пересечении луча полем зрения фотоприемникэ элект ромагиитное излучение попадает и исчезает на чувствительных элементах 7 и 8 в момент пересечения луча его границами. Информацией о том, какой границей поля зреь ия был пересечен луч, служит наличие сигнала на фоточувствительном элементе 7 или 8.
0 Например, сигнал появился на чувствительном элементе 7 фотоприемника 1, что соответству1эт пересечению луча границей 25 поля зрения, тогда блок 9 обработки видеосигналов определяет составляющие
5 коэффициенты направляющего вектора линии визирования луча, совпадающей в этот момент с границей поля зрения 25. Информацией о положении в простргнстве границы поля зрения 25 служит угол «2 в
показание датчика 4 угла поворота. А пс наличию сигнала на фоточув:твительном элементе 8 в момент его окончания блок 9 обработки видеосигналов опрэделяет вторую линию визирования лучг, совпадающую с границей поля зрения 23. Информацией о положении в пространстве границы 23 поля зрения служит угол a и показание датчика 4 угла поворрта. Задание направляющих векторов двух
пересекающихся Линий визирования и коЬрдинат точки их пересечения определяют плоскость, проходящую через луч. Блок 10 автоматической подстройки скорости вращения регулирует скорость вращения фото приемников 5 1 и 2, чтобы сигналы на них появлялись одновременно с сигналами на фотоприемнике 2. Это обеспечивает одновременность получения координат плоскостей, проходящих через луч, что повышает трчность при
определении координат движущегося луча. Блок 10 автоматической подстройки скорости вращения при опережении во времени сигналов с фотоприемника 1 по сравнению с сигналами с фотоприемника 2 уменьшает скорость вращения фотоприемника 1 и увеличивает скорость вращения - при отставании их. При вращении фотоприемника 1 граница 23 поля зрения описывает поверхность прямого кругового конуса 27, а граница 25 поля зрения - поверхность прямого кругового конуса 2В. Пространство, ограниченное поверхностью 27, лежит внутри пространства ограниченного поверхностью 28, так как имеет меньший телесный угол. Рабочей областью одного фотоприемника является пространство с меньшим углом, ограниченное конической поверхностью 27, так как при попадании луча в пространство, ограниченное поверхностью 27, он будет проходить через пространство, ограниченное поверхностью 28. Рабочей областью устройства является пространство, общее для рабочих областей всех фотоприемников.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ И УГОЛКОВОГО ОТРАЖАТЕЛЯ | 2014 |
|
RU2556282C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР (ВАРИАНТЫ) | 2008 |
|
RU2395108C2 |
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
| ОПТИЧЕСКИЙ СОЛНЕЧНЫЙ ДАТЧИК | 2013 |
|
RU2517979C1 |

1. Устройство для измерения координат протяженного источника светового излучения, содержащее три поворотных фотоприемных блока, расположенных в вершинах прямоугольного треугольника и каждый из которых состоит из последовательно размещенных объектива, щелевой диафрагмы, установленной в фокальной плоскости объектива, и фоточувствительного элемента, установленного за фокальной плоскостью объектива, три привода для вращения фотоприемных блоков относительно осей, образующих острые углы с оптическими осями фотоприемных блоков, три датчика углов поворота фотоприемных блоков, и Изобретение относится к системам ориентации и технике слежения за протяженными источниками светового излучения и может использоваться в системах ориентации по световому лучу. Целью изобретения является повышение точности и скорости измерения координат протяженного источника светового излучения. блок обработки видеосигналов, соединенный входами с выходами фотоприемных блоков и датчиков углов поворота фотоприемных блоков, о т л и ч а ю щ е е с я тем, что. с целью повышения точности и скорости измерений координат протяженного источника светового излучения, оно снабжено блоком автоматической подстройки скорости вращения фотоприемных блоков и тремя дополнительными фоточувствительными элементами, каждый из которых соединен выходом с дополнительным входом блока обработки видеосигналов и расположен симметрично с фоточувствительным элементом каждого поворотного фотоприемного блока относительно оптической оси его объектива в одной плоскости с этим элементом, блок автоматической подстройки скорости вращения фотоприемных блоков соединен тремя входами с выходами фотоприемных блоков, а каждый из двух приводов для вращения фотоприемных блоков соединен входом с одним из выходов блока автоматической подстройки скорости вра00 щения фотоприемных блоков, J ю 2. Устройство поп. 1,отличающеес я тем. что величина угла между оптически00 О ми осями фотоприемных блоков и осями их вращения составляет 15-60°. На фиг. 1 изображена структурная схема устройства; на фиг. 2 - схема расположения фотоприемников. Устройство содержит фотоприемники 1-3. ось вращения каждого из них соединена механической связью со своими датчиками углов поворота фотоприемника 4-6. Датчик углов поворота фотоприемников 46. чувствительные .элементы 7 и 8 фотоприемников 1-3 соединены с блоком 9
21
П
2i
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство ориентации по световому лучу | 1977 |
|
SU714905A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
