Изобретение относится к области управления работой авиационных многовальных газотурбинных двигателей (ГТД) и может быть использовано для управления подачей топлива в ГТД.
Наиболее близким к заявленному изобретению по технической сущности и достигаемому техническому результату является способ управления подачей топлива в камеру сгорания газотурбинного двигателя, заключающийся в том, что измеряется частота вращения ротора газогенератора, частота вращения ротора свободной турбины, температура продуктов сгорания в газовоздушном тракте двигателя, давление за компрессором газогенератора и формируется управляющее воздействие на исполнительный орган - клапан, дозирующий подачу топлива в камеру сгорания, при этом величину управляющего воздействия определяют с помощью совокупности регулирующих и ограничительных контуров контура отрицательной обратной связи с адаптивным законом регулирования, при этом регулирующие контуры поддерживают заданную величину частоты вращения ротора газогенератора или частоты вращения ротора свободной турбины, а ограничительные контуры предупреждают аварийные ситуации, удерживая параметры двигателя в заданном диапазоне, в каждый момент времени в качестве управляющего воздействия выбирают значение выхода одного из контуров, выбор которого осуществляют селектором минимума-максимума как результат формирования ошибки регулирования в каждом контуре на основании текущих измерений физических величин с последующим вычислением выходных значений контура, вычислением отдельно приращения к общему интегратору от каждого контура и дальнейшим последовательным сравнением выходных значений контуров друг с другом, при этом для регулирующих и верхних ограничительных контуров в качестве активных выбирают тот контур, выходное значение которого минимально, для нижних ограничительных контуров, выбирают контур, выходное значение которого максимально, после чего выходное значение выбранного активного контура складывают с величиной, накопленной в общем интеграторе, а рассчитанное приращение от активного контура прибавляют к величине значения общего интегратора для последующих вычислений и вырабатывают согласованное управляющее воздействие (RU 2322601 С1, МПК F02C 9/28, 2006).
В результате анализа указанного способа управления необходимо отметить, что он применим для работы только по одному регулирующему контуру: или частоты вращения ротора газогенератора, или частоты вращения ротора свободной турбины. Для управления авиационными многовальными ГТД необходимо решать задачу управления двумя роторами ГТД одновременно.
Также при управлении авиационными ГТД необходимо решить задачу согласования расхода воздуха через ГТД с расходом воздуха через входное устройство, что решается изменением минимальной частоты вращения ротора низкого давления (НД) в зависимости от скорости полета летательного аппарата или, косвенно, в зависимости от температуры воздуха на входе в ГТД.
При применении указанного способа управления для регулирования и ограничения частоты вращения ротора НД возникает эффект «мертвого хода» рычага управления двигателем (РУД): когда минимально допустимая частота вращения ротора НД выше заданной РУД, то при движении РУД режим работы ГТД не будет изменяться. Данный фактор негативно сказывается на управлении летательным аппаратом.
Задачей настоящего изобретения является обеспечение управления подачей топлива в камеру сгорания авиационных многовальных ГТД.
Техническим результатом настоящего изобретения является повышение качества управляемости ГТД и обеспечение надежности работы ГТД за счет регулирования нескольких параметров работы ГТД с соблюдением ограничений по их минимальным и максимальным значениям.
Указанный технический результат достигается тем, что в способе управления подачей топлива в камеру сгорания газотурбинного двигателя, выполненного многовальным, выбирают не менее двух регулируемых параметров (P1, Р2, …) работы ГТД, в процессе работы двигателя измеряют текущие значения (Р1изм, Р2изм, …) каждого из регулируемых параметров работы ГТД, температуру Твх воздуха на входе в ГТД и положение рычага управления двигателем (РУД), для каждого из выбранных регулируемых параметров формируют их максимально допустимые значения (P1max, P2max, …), из выбранных регулируемых параметров выбирают те, для которых формируют их минимально допустимые значения (P1min, P2min, …) и для каждого из этих выбранных регулируемых параметров в зависимости от положения РУД формируют заданное значение (Р1зад, Р2зад, …) регулируемого параметра в диапазоне от минимального до максимального допустимых значений этого регулируемого параметра, измеряют отклонения текущих значений регулируемых параметров от их максимально допустимых значений, и для каждого из отклонений формируют скорость (dGp1max, dGp2max, …) изменения расхода топлива для устранения отклонения регулируемого параметра от максимально допустимого, измеряют отклонения текущих значений регулируемых параметров от их заданных значений, и для каждого из отклонений формируют скорость (dGp1зад, dGp2зад, …) изменения расхода топлива для устранения отклонения регулируемого параметра от заданного, выбирают максимальное значение dGзад из скоростей изменения расхода топлива для устранения отклонений регулируемых параметров от заданных, выбирают минимальное значение dG из скоростей изменения расхода топлива для устранения отклонений регулируемых параметров от максимально допустимых значений и значения dGзад, формируют расход топлива в ГТД путем интегрирования выбранного значения dG скорости изменения расхода топлива dG и подают сформированный расход топлива в КС ГТД.
Существенные признаки могут иметь развитие и дополнение.
В качестве регулируемых параметров работы ГТД выбирают частоты вращения роторов низкого (НД) и высокого (ВД) давления, а также температуру газов за турбиной низкого давления.
В качестве регулируемых параметров, для которых формируют минимально допустимое и заданное значения, выбирают частоты вращения роторов НД и ВД.
Максимально допустимые значения регулируемых параметров формируют в зависимости от температуры воздуха на входе в ГТД.
Минимально допустимое значение частоты вращения ротора ВД формируют в зависимости от температуры воздуха на входе в двигатель.
Минимально допустимое значение частоты вращения ротора НД формируют в зависимости от температуры воздуха на входе в двигатель.
Двигатель установлен на летательном аппарате, и дополнительно измеряют число Маха (М) полета летательного аппарата, а минимально допустимое значение частоты вращения ротора НД формируют в зависимости от числа М полета.
Заявленное изобретение поясняется следующим подробным описанием его осуществления со ссылкой на чертеж, на котором представлена система управления, реализующая заявленный способ управления.
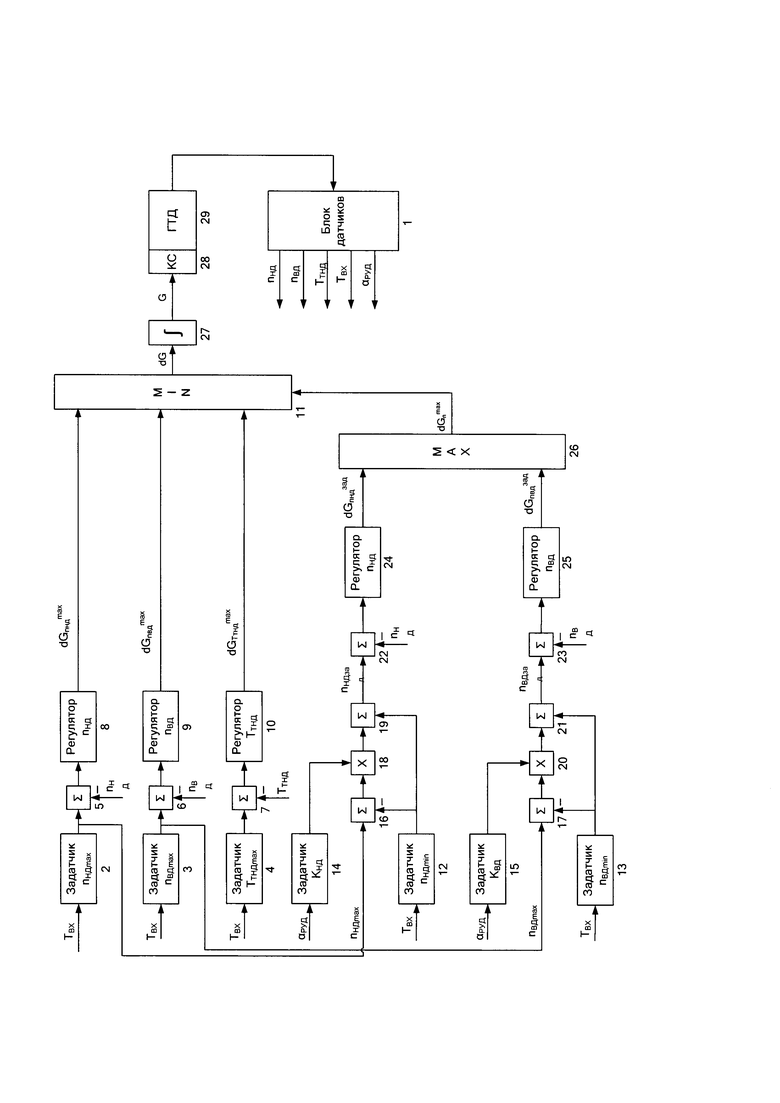
Система управления содержит блок 1 датчиков, измеряющих регулируемые параметры двигателя, например частоты вращения роторов низкого (nНд) и высокого давления (nВд), температуру ТТнд газов за турбиной низкого давления (ТНД), а также положение αРУД рычага управления двигателем (РУД) и температуру Твх воздуха на входе в двигатель.
Число регулируемых параметров двигателя может быть иным: для трехвальных ГТД регулируемой также является частота вращения ротора среднего давления, часто регулируемым является давление воздуха за компрессором высокого давления.
Система содержит задатчики максимально допустимых значений для каждого из регулируемых параметров. В примере реализации - это задатчик 2 максимально допустимой частоты nНДmах вращения ротора НД, задатчик 3 максимально допустимой частоты nВдmах вращения ротора ВД, задатчик 4 максимально допустимой температуры ТТндmах газов за ТНД.
Задатчики 2, 3, 4 формируют максимально допустимые значения регулируемых параметров в зависимости от температуры воздуха на входе в ГТД, поэтому выход датчика Твх от блока 1 подключен к входу каждого из задатчиков.
Способ формирования максимально допустимых значений регулируемых параметров может быть иным, например в качестве максимально допустимых значений могут быть заданы фиксированные значения параметров, полученные на основании расчетных и экспериментальных данных.
Для каждого из регулируемых параметров система содержит сумматоры, формирующие отклонения текущих значений регулируемых параметров от их максимально допустимых значений. В примере реализации это:
сумматор 5, формирующий отклонение частоты вращения ротора НД от максимально допустимой, к первому входу сумматора 5 подключен выход задатчика 2, к второму (инвертирующему) входу сумматора 5 подключен выход датчика частоты вращения ротора НД блока 1;
сумматор 6, формирующий отклонение частоты вращения ротора ВД от максимально допустимой, к первому входу сумматора 6 подключен выход задатчика 3, к второму (инвертирующему) входу сумматора 6 подключен выход датчика частоты вращения ротора ВД блока 1;
сумматор 7, формирующий отклонение температуры газов за ТНД от максимально допустимой, к первому входу сумматора 7 подключен выход задатчика 4, к второму (инвертирующему) входу сумматора 7 подключен выход датчика температуры газов за ТНД блока 1.
Для каждого из регулируемых параметров система содержит регуляторы, формирующие скорость изменения расхода топлива для устранения отклонения соответствующего регулируемого параметра от его максимально допустимого значения. Регуляторы могут быть выполнены различным образом, например в виде пропорциональных регуляторов.
В примере реализации это: регулятор 8 частоты вращения ротора НД (формирует скорость dGnндmах), регулятор 9 частоты вращения ротора ВД (формирует скорость dGnвдmах), регулятор 10 температуры газов за ТНД (формирует скорость dGТтндmах).
К входу регулятора 8 подключен выход сумматора 5, к входу регулятора 9 подключен выход сумматора 6, к входу регулятора 10 подключен выход сумматора 7.
Система содержит селектор 11 минимального уровня, к входам которого подключены выходы регуляторов 8, 9 и 10.
Система содержит задатчики минимально допустимых значений регулируемых параметров, при этом минимально допустимые значения регулируемых параметров могут быть сформированы не для всех из регулируемых параметров, а только для части.
В примере реализации минимально допустимые значения формируются задатчиком 12 для частоты вращения ротора НД (nНдmin) и задатчиком 13 для частоты вращения ротора ВД (nВдmin).
Задатчики 12 и 13 формируют минимально допустимые значения регулируемых параметров в зависимости от температуры воздуха на входе в ГТД, поэтому выход датчика Твх от блока 1 подключен к входу каждого из задатчиков.
Способ формирования минимально допустимых значений регулируемых параметров может быть иным, например в качестве минимально допустимых значений могут быть заданы фиксированные значения параметров, полученные на основании расчетных и экспериментальных данных.
Для каждого из регулируемых параметров, для которого задается минимально допустимое значение, необходимо задать закон изменения параметра от положения РУД.
Задатчик 14 формирует коэффициент в зависимости от положения РУД для формирования заданной частоты вращения ротора НД (КНд), задатчик 15 - для ротора ВД (Квд). К входам задатчиков 14, 15 подключен сигнал аРУД от блока 1. Значения коэффициента, формируемого задатчиком, лежат в диапазоне от 0 до 1, ноль соответствует режиму «малый газ» (МГ), единица - максимальному режиму работы ГТД.
Система содержит сумматоры 16 и 17.
К первому входу сумматора 16 подключен выход задатчика 2 максимально допустимой частоты вращения ротора НД, к второму (инвертирующему) входу сумматора 16 - выход задатчика 12 минимально допустимой частоты вращения ротора НД. Сумматор 16 формирует разницу между минимальным и максимально допустимым значениями частоты вращения ротора НД.
К первому входу сумматора 17 подключен выход задатчика 3 максимально допустимой частоты вращения ротора ВД, к второму (инвертирующему) входу сумматора 17 - выход задатчика 13 минимально допустимой частоты вращения ротора В Д. Сумматор 17 формирует разницу между минимальным и максимально допустимым значениями частоты вращения ротора ВД.
Выход сумматора 16 подключен к первому входу мультипликатора 18, к второму входу которого подключен выход задатчика 14. Выход мультипликатора 18 подключен к первому входу сумматора 19, ко второму входу которого подключен выход задатчика 12. Сумматор 19 формирует заданное значение частоты nНдзад вращения ротора НД.
Элементы 2, 12, 14, 16, 18, 19 реализуют следующую зависимость заданной частоты ротора НД:

где:
nндmin - минимально допустимая частота вращения ротора НД;
Kнд - коэффициент положения РУД для формирования заданной частоты вращения ротора НД;
nНДmin - максимально допустимая частота вращения ротора НД.
При РУД, установленном на площадку МГ (или ниже), KНд равно 0 и заданная частота вращения ротора НД будет равна частоте вращения ротора НД на режиме МГ. При РУД, установленном на площадку максимального режима работы двигателя (или выше - форсированного режима), KНд равно 1 и заданная частота будет равна максимально допустимой частоте вращения ротора НД. В диапазоне положения РУД между площадками МГ и максимального режима заданная частота вращения ротора НД будет пропорциональна положению РУД.
Выход сумматора 17 подключен к первому входу мультипликатора 20, к второму входу которого подключен выход задатчика 15. Выход мультипликатора 20 подключен к первому входу сумматора 21, ко второму входу которого подключен выход задатчика 13. Сумматор 21 формирует заданное значение частоты nВдзад вращения ротора ВД.
Элементы 3, 13, 15, 17, 20, 21 реализуют следующую зависимость заданной частоты ротора ВД:

где:
nвдmin - минимально допустимая частота вращения ротора ВД;
KВд - коэффициент положения РУД для формирования заданной частоты вращения ротора ВД;
nвдmin - максимально допустимая частота вращения ротора ВД.
При РУД, установленном на площадку МГ (или ниже), KВд равно 0 и заданная частота вращения ротора ВД будет равна частоте вращения ротора ВД на режиме МГ. При РУД, установленном на площадку максимального режима работы двигателя (или выше - форсированного режима), KВд равно 1 и заданная частота будет равна максимально допустимой частоте вращения ротора ВД. В диапазоне положения РУД между площадками МГ и максимального режима заданная частота вращения ротора ВД будет пропорциональна положению РУД.
Система содержит сумматоры 22 и 23. К первому входу сумматора 22 подключен выход сумматора 19, к второму (инвертирующему) входу сумматора 22 - сигнал частоты вращения ротора НД от блока 1. Сумматор 22 формирует отклонение частоты вращения ротора НД от ее заданного значения. К первому входу сумматора 23 подключен выход сумматора 21, к второму (инвертирующему) входу сумматора 23 - сигнал частоты вращения ротора ВД от блока 1. Сумматор 23 формирует отклонение частоты вращения ротора ВД от ее заданного значения.
Система содержит второй регулятор 24 частоты вращения ротора НД и второй регулятор 25 частоты вращения ротора ВД, формирующие скорости изменения расхода топлива для устранения отклонения регулируемого параметра от его заданного значения. Регуляторы 24 и 25 могут быть выполнены идентичными регуляторам 8 и 9 соответственно. В частности, в качестве регуляторов 24 и 25 могут использоваться известные ПИД-регуляторы.
Регулятор 24 формирует скорость dGnндзад изменения расхода топлива для устранения отклонения частоты вращения ротора НД от ее заданного значения. Регулятор 25 формирует скорость dGnвдзад изменения расхода топлива для устранения отклонения частоты вращения ротора ВД от ее заданного значения.
Система содержит селектор 26 максимального уровня. К входу селектора 26 подключены выходы регуляторов 24 и 25.
Селектор 26 выбирает максимальное значение dGзад из скоростей изменения расходов топлива для устранения отклонений регулируемых параметров от заданных:

Выход селектора 26 подключен к одному из входов селектора 11 минимального уровня.
Селектор 11 выбирает минимальное значение dG из скоростей изменения расхода топлива для устранения отклонений регулируемых параметров от максимально допустимых значений и расхода dGзад:

Выход селектора 11 подключен к входу интегратора 27, формирующего суммарный расход G топлива, который через систему дозирования (на схеме не показана) подается в камеру сгорания 28 ГТД 29.
Расход топлива на режимах запуска ГТД 29 формируется не из условия поддержания регулируемых параметров работы ГТД 29 на заданном уровне. Для запуска ГТД 29 могут использоваться, например, программы изменения расхода топлива от времени. Процесс запуска ГТД 29 не относится к области настоящего изобретения.
Рассмотрим работу системы на режимах малого газа и выше.
РУД установлен на площадку малого газа, ГТД 29 запущен. Примем, что частота вращения ротора ВД соответствует частоте вращения ротора ВД на режиме МГ при нормальных условиях, а частота вращения ротора НД выше частоты вращения ротора НД на режиме МГ при нормальных условиях.
Задатчики 2, 3, 4 формируют максимально допустимые значения регулируемых параметров. На сумматорах 5, 6, 7 формируются отклонения регулируемых параметров от их заданных значений. Т.к. режим работы двигателя минимальный (МГ), то регулируемые параметры находятся далеко от их максимальных значений, регуляторы 8, 9, 10 формируют большие скорости изменения расхода топлива.
На сумматорах 19 и 21 формируются заданные значения частот nНдзад, nвдзад вращения роторов. Т.к. РУД установлен на площадку МГ, то выходным сигналом сумматора 19 является частота вращения ротора НД на режиме МГ, а выходным значением сумматора 21 - частота вращения ротора ВД на режиме МГ.
Частота вращения ротора НД выше минимально допустимой, поэтому регулятор 24 будет формировать отрицательную скорость изменения расхода топлива.
Частота вращения ротора ВД соответствует режиму МГ, поэтому регулятор 25 будет формировать нулевую скорость изменения расхода топлива.
Селектор 26 выберет максимальную из двух скоростей - нулевую.
Селектор 11 минимального уровня - выберет минимальную из скоростей изменения расхода топлива, сформированных регуляторами 8, 9, 10, и нулевой скорости, формированную селектором 26.
Выходным значением селектора 11 окажется нулевая скорость изменения расхода. Значение интеграла останется неизменным, суммарный расход топлива в двигатель не изменится и будет соответствовать расходу топлива на режиме малого газа.
При изменении скорости движения летательного аппарата, по мере разгона, температура воздуха на входе в ГТД 29 начнет расти. В этих условиях для согласования расходов воздуха через входное устройство и двигатель необходимо увеличить расход воздуха через ГТД 29 - увеличить частоту вращения ротора НД.
Согласно заложенной в задатчик 12 зависимости, при росте Твх начнет увеличиваться минимально допустимая частота вращения ротора НД. Когда минимально допустимая частота вращения превысит текущую частоту вращения на режиме МГ, регулятор 24 сформирует положительную скорость изменения расхода топлива, которую выберет селектор 26, а затем выберет селектор 11. Интегратор 27 начнет интегрировать данный сигнал, увеличивая расход топлива в КС 28 ГТД 29, что приведет к росту частот вращения ротора НД и ротора ВД. Рост будет продолжаться до тех пор, пока текущая частота вращения ротора НД не сравняется с минимально допустимой. Тогда сумматор 22 сформирует нулевое отклонение, регулятор 24 нулевую скорость изменения расхода, и интегратор 27 прекратит увеличивать суммарный расход топлива.
При этом, т.к. рост частот вращения роторов НД и ВД происходит синхронно, частота вращения ротора ВД станет выше заданной частоты вращения ротора ВД на режиме МГ, регулятор 25 будет формировать отрицательную скорость изменения расхода топлива, но селектор 26 не будет ее выбирать.
Таким образом, система реализует ограничение минимального значения любого количества регулируемых параметров.
Если РУД будет переведен чуть выше площадки МГ, то любое смещение РУД тут же вызовет увеличение заданной частоты вращения ротора НД и ротора ВД над ее текущим минимально допустимым уровнем, и система будет регулировать заданные частоты, выбирая тот регулятор, который необходим для поддержания режима в данный момент времени.
Регулирование будет происходить до тех пор, пока заданные значения частот вращения будут меньше максимально допустимых. Если в процессе регулирования какой-то из регулируемых параметров двигателя увеличится и приблизится к своему максимальному значению, например Ттнд, то селектор 11 выберет сигнал этого регулятора, и не допустит увеличение режима работы ГТД.
Предложенный способ управления подачей топлива в камеру сгорания ГТД позволяет регулировать одновременно несколько параметров работы ГТД с соблюдением ограничений по их минимальным и максимальным значениям, при этом сохраняется управляемость двигателем при любом изменении положения РУД. Система обеспечивает непрерывное управление ГТД и повышает безопасность работы ГТД, а также позволяет обеспечивать безопасность совместной работы ГТД и входного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2652267C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления | 2021 |
|
RU2778417C1 |
| Способ управления подачей топлива в газотурбинный двигатель и система для его осуществления | 2019 |
|
RU2730581C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2022 |
|
RU2774564C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
| Способ управления газотурбинным двигателем самолета на режимах руления и разбега | 2023 |
|
RU2829124C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| Способ управления газотурбинным двигателем самолета на режиме разбега | 2023 |
|
RU2825180C1 |
Изобретение относится к области авиационного двигателестроения. Способ управления подачей топлива в камеру сгорания многовального газотурбинного двигателя (ГТД) заключается в том, что выбирают не менее двух регулируемых параметров работы двигателя, в процессе работы двигателя измеряют текущие значения каждого из регулируемых параметров работы ГТД, температуру Твх воздуха на входе в ГТД и положение рычага управления двигателем (РУД), для каждого из выбранных регулируемых параметров формируют их максимально допустимые значения, из выбранных регулируемых параметров выбирают те, для которых формируют их минимально допустимые значения и для каждого из этих выбранных регулируемых параметров в зависимости от положения РУД формируют заданное значение регулируемого параметра в диапазоне от минимального до максимального допустимых значений этого регулируемого параметра, измеряют отклонения текущих значений регулируемых параметров от их максимально допустимых и заданных значений, и для каждого из отклонений формируют скорость изменения расхода топлива для устранения отклонения регулируемого параметра, выбирают максимальное и минимальное значение из скоростей изменения расхода топлива, формируют расход топлива в ГТД путем интегрирования выбранной скорости dG изменения расхода топлива и подают сформированный расход топлива в камеру сгорания ГТД. Технический результат - повышение качества управляемости ГТД и обеспечение надежности работы ГТД за счет регулирования нескольких параметров работы ГТД с соблюдением ограничений по их минимальным и максимальным значениям. 6 з.п. ф-лы, 1 ил.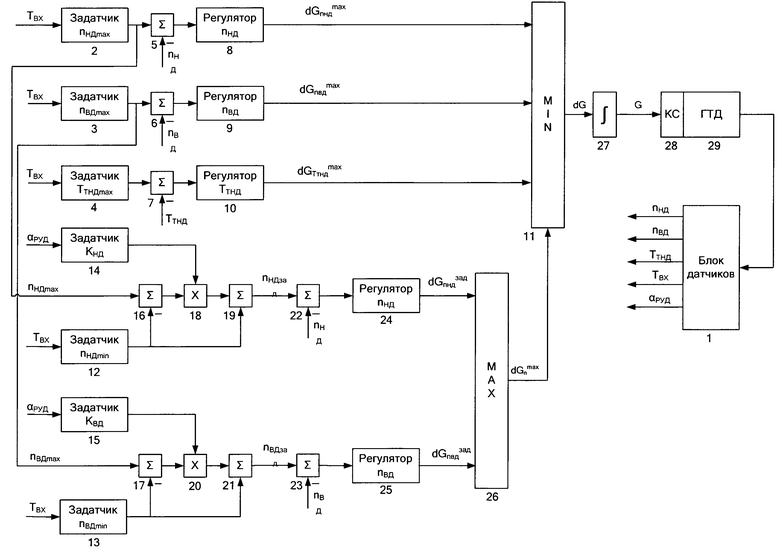
1. Способ управления подачей топлива в камеру сгорания (КС) газотурбинного двигателя (ГТД), выполненного многовальным, заключающийся в том, что
выбирают не менее двух регулируемых параметров (P1, Р2, …) работы ГТД,
в процессе работы двигателя измеряют текущие значения (Р1изм, Р2изм, …) каждого из регулируемых параметров работы ГТД, температуру Твх воздуха на входе в ГТД и положение рычага управления двигателем (РУД),
для каждого из выбранных регулируемых параметров формируют их максимально допустимые значения (P1max, Р2mах, …),
из выбранных регулируемых параметров выбирают те, для которых формируют их минимально допустимые значения (Р1min, P2min, …) и для каждого из этих выбранных регулируемых параметров в зависимости от положения РУД формируют заданное значение (Р1зад, Р2зад, …) регулируемого параметра в диапазоне от минимального до максимального допустимых значений этого регулируемого параметра, измеряют отклонения текущих значений регулируемых параметров от их максимально допустимых значений, и для каждого из отклонений формируют скорость (dGp1max, dGp2max, …) изменения расхода топлива для устранения отклонения регулируемого параметра от максимально допустимого,
измеряют отклонения текущих значений регулируемых параметров от их заданных значений, и для каждого из отклонений формируют скорость (dGp1зад, dGp2зад, …) изменения расхода топлива для устранения отклонения регулируемого параметра от заданного,
выбирают максимальное значение dGзад из скоростей изменения расхода топлива для устранения отклонений регулируемых параметров от заданных,
выбирают минимальное значение dG из скоростей изменения расхода топлива для устранения отклонений регулируемых параметров от максимально допустимых значений и значения dGзад,
формируют расход топлива в ГТД путем интегрирования выбранного значения dG скорости изменения расхода топлива и подают сформированный расход топлива в КС ГТД.
2. Способ управления по п. 1, отличающийся тем, что в качестве регулируемых параметров работы ГТД выбирают частоты вращения роторов низкого (НД) и высокого (ВД) давления, а также температуру газов за турбиной низкого давления.
3. Способ управления по п. 2, отличающийся тем, что в качестве регулируемых параметров, для которых формируют минимально допустимое и заданное значения, выбирают частоты вращения роторов НД и ВД.
4. Способ управления по п. 2, отличающийся тем, что максимально допустимые значения регулируемых параметров формируют в зависимости от температуры воздуха на входе в ГТД.
5. Способ управления по п. 3, отличающийся тем, что минимально допустимое значение частоты вращения ротора ВД формируют в зависимости от температуры воздуха на входе в двигатель.
6. Способ управления по п. 3, отличающийся тем, что минимально допустимое значение частоты вращения ротора НД формируют в зависимости от температуры воздуха на входе в двигатель.
7. Способ управления по п. 3, отличающийся тем, что двигатель установлен на летательном аппарате, и дополнительно измеряют число Маха (М) полета летательного аппарата, а минимально допустимое значение частоты вращения ротора НД формируют в зависимости от числа М полета.
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА ДЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2322601C1 |
| Устройство для телеизмерения | 1957 |
|
SU115832A1 |
| Способ регулирования авиационного турбореактивного двухконтурного двигателя | 2016 |
|
RU2623605C1 |

