Изобретение относится к машиностроению и может быть использовано для сообщения прецизионного вращательного или колебательного движения различным механизмам, как при их штатном использовании, так и при испытаниях измерительных датчиков угла, угловых скоростей, линейных (центробежных) ускорений, при испытаниях и эксплуатации механизмов, используемых в народном хозяйстве, в тренажерах и т.д.
Известен электропривод для создания вращательного момента, содержащий размещенные в корпусе планетарный многоступенчатый редуктор с последовательным расположением ступеней, выходной вал в виде зубчатого колеса, связанный с водилом предыдущей ступени, сателлиты, приводной элемент и др. [1].
Для управления электроприводом, если он выполнен на электродвигателях постоянного тока, в простейшем случае используются источник питания постоянного тока с заданным выходным напряжением и, при необходимости, реостат [2] либо иное устройство управления напряжением питания электродвигателя, например устройство с широтно-импульсной модуляцией. Для управления электродвигателем переменного тока по аналогии может быть использован регулируемый автотрансформатор.
Недостатком таких электроприводов для создания вращательного момента является невысокий КПД, низкая точность скорости вращения выходного вала устройства, отсутствие возможности обеспечить поворот выходного вала на заданный угол, задать колебательное движение.
С точки зрения управления электроприводом непосредственное включение через реостат позволяет регулировать скорость вращения электродвигателя, но существенно снижает КПД устройства, не может обеспечить заданную точность скорости вращения выходного вала устройства и не может обеспечить поворот на заданный угол. При включении электродвигателя переменного тока через автотрансформатор КПД падает незначительно, но обеспечить заданные параметры вращения выходного вала устройства невозможно.
Известен электропривод по патенту РФ №2002361, Н02Р 8/00 [3], в котором содержатся признаки, позволяющие принять его за прототип как для электропривода для создания вращательного момента, так и для его системы управления. Из общего числа признаков известного устройства существенными (и общими) с точки зрения предложенного устройства являются следующие.
Электропривод для создания вращательного момента содержит шаговый электродвигатель, связанный с выходным валом электропривода через редуктор, второй (дополнительный) электродвигатель, кинематически связанный с выходным валом.
Система его управления содержит источник питания (предполагается по умолчанию), шаговый электродвигатель, второй (дополнительный) электродвигатель (в данном случае - постоянного тока), блок управления шаговым электродвигателем (обобщенное назначение взаимосвязанных функциональных узлов) и переключатель направления вращения (функционально - это определенные признаки прототипа), подключенный выходом к второму электродвигателю, при этом выходы блока управления шаговым электродвигателем соединены с обмотками шагового электродвигателя.
Недостатком устройства-прототипа являются низкая точность скорости вращения выходного вала даже при использовании шагового двигателя. Обусловлено это следующим. При малых скоростях вращения выходного вала устройства (при выключенном втором электродвигателе) момент, создаваемый шаговым электродвигателем, через дифференциал передается на второй электродвигатель, который от этого момента может вращаться. В результате этого из-за вычитания скоростей в дифференциале скорость вращения выходного вала будет не соответствовать заданной. При работе на максимальных скоростях вращения, когда в работу вступает второй электродвигатель, в редукторе (дифференциале) устройства происходит сложение скоростей вращения двух двигателей. Поскольку скорость вращения второго электродвигателя имеет низкую точность, скорости вращения выходного вала не могут иметь высокой точности. Таким образом, эти недостатки привода не позволяют использовать его в прецизионных устройствах и в устройствах, обеспечивающих поворот на заданный угол или прецизионный колебательный режим. Более того, особенности работы шагового электродвигателя, как такового (низкая приемистость, выпадение из синхронизма [4]), предопределяют существенный недостаток устройства, в котором он установлен, а именно - снижение его функциональной надежности.
Задачами предлагаемого технического решения являются расширение динамического диапазона скоростей вращения выходного вала электропривода в режиме его разгона, увеличение функциональной надежности, обеспечение прецизионной точности скорости вращения, обеспечение возможности поворота выходного вала электропривода на заданный угол и колебательного режима работы (типа маятникового). Кроме того, в предложении достигается упрощение конструкции устройства.
Технический результат достигается тем, что в электроприводе для создания вращательного момента, содержащем шаговый электродвигатель, выходной вал которого связан через редуктор с выходным валом электропривода, и дополнительный электродвигатель, кинематически связанный с выходным валом электропривода, кинематическая связь дополнительного электродвигателя с выходным валом электропривода выполнена с использованием ременной передачи, содержащей ремень, охватывающий ведущий и ведомый шкивы, размещенные соответственно на выходном валу дополнительного электродвигателя и на выходном валу электропривода или на выходном валу шагового электродвигателя, при этом вращающий момент, развиваемый дополнительным электродвигателем на выходном валу электропривода, больше момента трения на выходном валу электропривода, но не превышает вращающего момента на выходном валу электропривода от шагового электродвигателя.
В систему управления электроприводом для создания вращательного момента, содержащую источник питания постоянного напряжения, шаговый электродвигатель и блок управления шаговым электродвигателем, связанный выходами с обмотками шагового электродвигателя, дополнительный электродвигатель и переключатель направления вращения дополнительного электродвигателя, введен дополнительный источник питания, вход блока управления шаговым электродвигателем соединен с источником питания постоянного напряжения, дополнительный электродвигатель через переключатель направления вращения подключен к дополнительному источнику питания, блок управления шаговым электродвигателем снабжен управляющими выходами, переключатель направления вращения дополнительного электродвигателя снабжен управляющими входами, которые соединены с управляющими выходами блока управления шаговым электродвигателем.
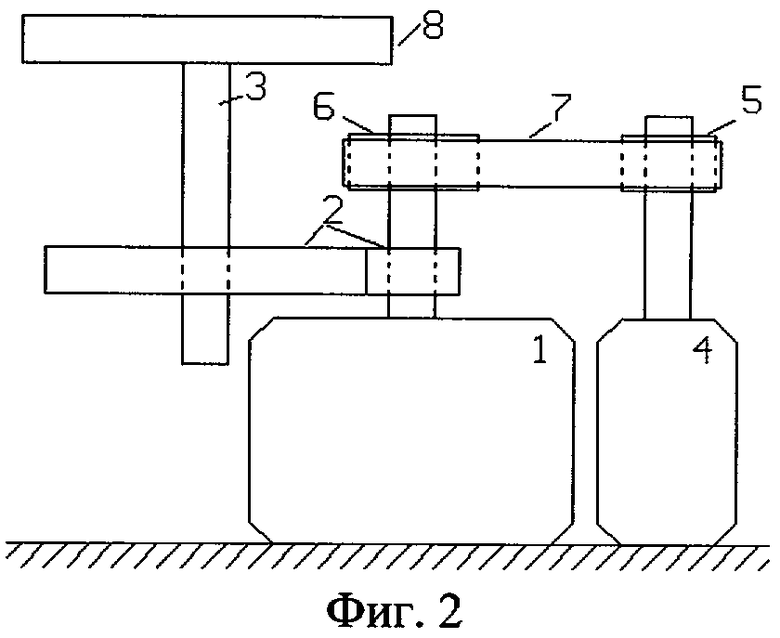
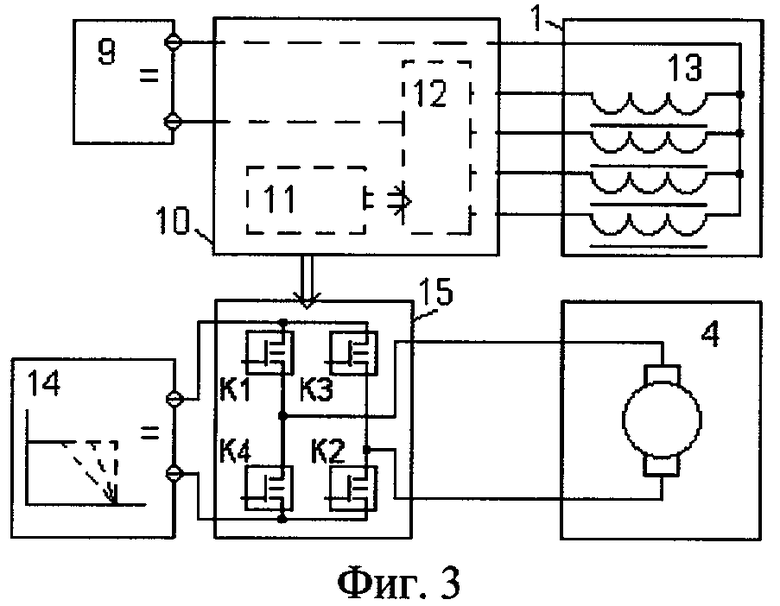
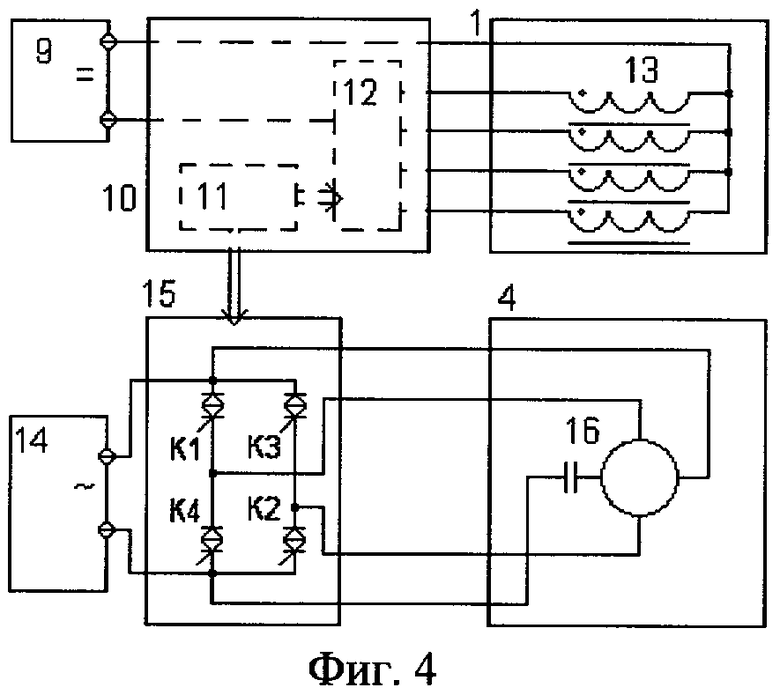
Суть изобретения поясняется с помощью графических материалов фиг.1 и фиг.2, где приведены функциональные (кинематические) блок-схемы предлагаемого электропривода для создания вращательного момента. На чертежах приведены только принципиальные узлы устройства и не показаны опоры, упоры, подшипники, шестерни и т.п., поскольку исполнение их может быть любым, и они не являются предметом данного изобретения. Представленные устройства по своему существу эквивалентны друг другу. На фиг.3 и 4 приведены блок-схемы системы управления электродвигателями предлагаемого электропривода, отличающиеся между собой типами и характеристиками дополнительного электродвигателя, дополнительного источника питания и исполнением переключателя направления вращения дополнительного двигателя, по существу также эквивалентные друг другу.
Цифрами на чертежах обозначены:
1 - шаговый электродвигатель;
2 - редуктор;
3 - выходной вал электропривода;
4 - дополнительный электродвигатель;
5 - ведущий шкив;
6 - ведомый шкив;
7 - ремень ременной передачи;
8 - поворотная платформа;
9 - блок питания шагового электродвигателя;
10 - блок управления шаговым электродвигателем;
11 - блок задания режимов работы шагового электродвигателя;
12 - коммутатор обмоток шагового электродвигателя;
13 - обмотки шагового двигателя;
14 - дополнительный блок питания;
15 - переключатель направления вращения дополнительного электродвигателя 4.
Электропривод для создания вращательного момента (фиг.1 и фиг.2) состоит из шагового электродвигателя 1, соединенного с помощью редуктора 2 с выходным валом 3 электропривода, и дополнительного электродвигателя 4, ведущий шкив 5 которого с помощью ремня 7 ременной передачи соединен с ведомым шкивом 6 электропривода. При этом ведомый шкив 6 может быть установлен непосредственно на выходном валу 3 электропривода (фиг.1) либо на выходном валу шагового электродвигателя 1 (фиг.2). На выходном валу 3 электропривода может быть установлен любой механизм, требующий вращения (поворота) по заданному закону (на заданный угол), либо поворотная платформа 8, на которой может размещаться испытуемая аппаратура. Редуктор 2, в зависимости от технических характеристик электропривода, может быть выполнен многоступенчатым.
Блоки управления 10 (фиг.3 и фиг.4) шаговыми двигателями показаны условно разделенными на два независимых блока 11 и 12 только для того, чтобы легче было рассматривать работу предложенных устройств в целом. Реально они могут быть выполнены любым образом, с использованием полупроводниковых приборов, микросхем, контроллеров, компьютеров и т.п., в том числе - в виде моноблока. Блок управления шаговым электродвигателем 10 снабжен управляющими выходами, переключатель направления вращения дополнительного электродвигателя 15 снабжен управляющими входами, которые соединены с управляющими выходами блока управления шаговым электродвигателем.
Питание на обмотки шагового электродвигателя (фиг.3, фиг.4) поступает от блока питания шагового электродвигателя 9 через блок управления шаговым электродвигателем 10 (с выхода коммутатора обмоток шагового электродвигателя 12). Управление этим коммутатором осуществляется с помощью импульсных сигналов блока задания режимов работы шагового электродвигателя 11. Питание на дополнительный электродвигатель 4 поступает от дополнительного блока питания 14 через переключатель направления вращения дополнительного электродвигателя 15, управление которым производится из блока управления шаговым двигателем 10.
Требования к дополнительному электродвигателю 4 вытекают из его функционального назначения в предложенном устройстве - обеспечивать дополнительный момент при разгоне электропривода (обеспечить повышение приемистости устройства), компенсировать вращательный момент трения при больших скоростях вращения (увеличить динамический диапазон скоростей вращения) и при этом не влиять на формирование заданной скорости вращения шаговым электродвигателем. Для этого его максимальный вращающий момент, приведенный к выходному валу устройства, не должен превышать вращающий момент шагового электродвигателя, также приведенного к выходному валу устройства. В системе управления фиг.3 это обеспечивается тем, что при пуске и малых скоростях вращения электродвигателя 4 за счет его большого тока потребления резко уменьшается выходное напряжения дополнительного блока питания 14 и таким образом уменьшается мощность и пусковой момент дополнительного электродвигателя 4, хотя его максимальный пусковой момент при номинальном напряжении питания может существенно превышать номинальный пусковой момент шагового электродвигателя 1. В системе управления фиг.4 асинхронный электродвигатель переменного тока, подключаемый к дополнительному блоку питания 14 переменного напряжения, обладая мягкой пусковой характеристикой, работает в большом динамическом диапазоне скоростей без электрической перегрузки (примером конструкции такого электродвигателя может быть электродвигатель бытового вентилятора). Эта совокупность свойств источника переменного напряжения и асинхронного электродвигателя эквивалентны свойствам источника постоянного напряжения с падающей характеристикой и электродвигателя постоянного напряжения.
Ремень ременной передачи 7 (фиг.1 и 2) служит не только для передачи момента от дополнительного электродвигателя 4 к выходному валу электропривода 3, но и, в силу определенной вязкости ремня ременной передачи 7, для демпфирования резонансных колебаний, возникновение которых неизбежно в высокодобротной электромеханической системе, обладающей упругостью, импульсными силами управления и инерционной массой. Вязкость ремня вносит затухание в эту систему и колебания не возникают.
Блок питания шагового электродвигателя 9 (фиг.3, 4) подключен к блоку управления шаговым электродвигателем 10, который содержит блок задания режимов работы шагового электродвигателя 11 и коммутатор обмоток шагового электродвигателя 12. Работают они совместно следующим образом. Блок задания режимов работы шагового электродвигателя 11 вырабатывает последовательность импульсов управления ключами коммутатора обмоток шагового электродвигателя 12. Этот коммутатор (выполнен обычно на транзисторах, работающих в ключевом режиме) последовательно подает на обмотки 13 шагового электродвигателя 1 напряжение питания.
Подключение дополнительного блока питания 14 к дополнительному электродвигателю 4 производится с помощью переключателя направления вращения дополнительного электродвигателя 15. Его управляемые ключи К1-К4 формируют четыре режима работы дополнительного электродвигателя 4 (см. фиг.3 и 4): исходное, когда цепь питания дополнительного электродвигателя отключена (ни один из ключей К1-К4 не включен), два рабочих состояния, при которых цепи питания дополнительного электродвигателя 4 замкнуты, а полярность (или фаза - для фиг.4) его подключения к блоку питания противоположна (включены ключи К1 и К2 либо К3 и К4), и четвертое состояние, когда включенными ключами, например К2 и К4, замкнута накоротко электрическая цепь самого дополнительного электродвигателя 4, что способствует торможению дополнительного электродвигателя 4 и ускоренному снижению скорости вращения выходного вала 3 устройства.
Работает устройство в целом следующим образом.
Напряжение на обмотки шагового электродвигателя 13 (фиг.3 и фиг.4) поступает от блока питания шагового электродвигателя 9 через блок управления шаговым электродвигателем 10 в виде импульсов в соответствии с частотой и последовательностью, сформированными блоком задания режимов работы шагового электродвигателя 11 (блок управления шаговым электродвигателем, как таковой, не входит в объем притязаний, поэтому в материалах заявки не приводится и подробно не рассматривается). Вращение ротора шагового электродвигателя 1 передается через редуктор 2 на выходной вал электропривода 3. Через ременную передачу вращение передается также на вал дополнительного электродвигателя 4, и он может вращаться на холостом ходу. Когда на дополнительный электродвигатель 4 через замкнутые ключи переключателя направления вращения дополнительного электродвигателя 15 поступает напряжение питания (а это обеспечивается при работе электропривода во всем диапазоне моментов и скоростей вращения выходного вала устройства с помощью сигналов управления из блока управления шаговым электродвигателем 10 в переключатель направления вращения дополнительного электродвигателя 15), то он за счет собственного момента через ременную передачу сообщает выходному валу 3 электропривода дополнительный вращательный момент. В простейшем случае при смене направления вращения шагового электродвигателя блок управления шагового электродвигателя 10 снимает управляющие сигналы с ключей К1 и К2 и выставляет такие сигналы на ключах К3 и К4 либо наоборот. При необходимости торможения дополнительным электродвигателем 4 из блока управления шагового электродвигателя 10 на входы переключателя направления вращения дополнительного электродвигателя 15 поступают сигналы, открывающие ключи К2 и К4. Конкретное исполнение схемы управления переключателя направления вращения дополнительного электродвигателя 15 на чертежах не приведено, поскольку конкретная схема - «дело вкуса» разработчика. В качестве достаточно универсальных схем управления могут быть использованы микросхемы драйверов фирмы International Rectifier, простейший из которых IR2101.
При малой скорости вращения выходного вала 3 и скорости вращения дополнительного электродвигателя 4 его момент максимальный. При этом увеличивается суммарный вращающий момент при разгоне электропривода и его приемистость. По мере увеличения скорости вращения выходного вала электропривода дополнительный электродвигатель выходит на номинальный режим, компенсирует потери на трение в устройстве, создает дополнительный вращающий момент и поддерживает вращение шагового электродвигателя при его максимально возможных скоростях.
Переменную составляющую скорости вращения (вибрацию) ротора и выходного вала устройства, возникающую за счет импульсного управления шаговым электродвигателем, сглаживает ременная передача дополнительного электродвигателя за счет вязких и упругих свойств ремня. Эти свойства ременной передачи (особенно - его вязкость) гасят резонансы в электромеханике устройства.
Разворот выходного вала электропривода на заданный угол с заданной скоростью, а также прецизионный колебательный режим выходного вала 3 устройства обеспечивается путем формирования блоком управления шагового двигателя 10 необходимого количества импульсов на обмотки шагового электродвигателя с необходимой последовательностью и частой переключения. Алгоритм управления вырабатывает блок задания режимов работы шагового электродвигателя 11. При этом одновременно с изменением направления вращения шагового электродвигателя производится изменение полярности (или фазы) питания дополнительного электродвигателя 4 так, как это описано выше.
Для реверсирования направления вращения асинхронного электродвигателя (фиг.4), обычно имеющего две обмотки, предназначенные для создания вращающегося магнитного поля, переключатель направления вращения дополнительного электродвигателя 15 должен переключать только одну из них (например, «конденсаторную»), а вторая может быть включена одновременно с включением источника питания 14 либо дополнительным ключом (на чертеже не показано).
Упрощение устройства по сравнению с прототипом достигается за счет того, что вместо дифференциального редуктора используются простые передачи с использованием шестерен и ремня, а в качестве дополнительного источника питания может быть использован даже нестабилизированный источник напряжения с ограничением максимального тока и без принудительного управления, которое применено в устройстве-прототипе, либо стандартная сеть переменного напряжения.
Предлагаемая совокупность признаков в рассмотренном авторами предложении не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень".
Рассмотренный электропривод для создания вращательного момента, на котором установлена платформа, приводимая им во вращение, будет использоваться для задания прецизионных вращательных движений с разными угловыми скоростями различных устройств при их испытаниях в процессе производства. В настоящее время электропривод находится на стадии изготовления.
Литература
1. Кудрявцев В.Н. Планетарные передачи. - Л.: 1966, с.247-243, рис.133 и 134.
2. И.М.Юровский, Н.А.Чекалин. Лабораторный практикум по электроприводу и основам управления. Издание второе, дополненное и переработанное. М.: Высшая школа, 1972 г., с.9, рис.1.3, рис.1.4.
3. Патент РФ №2002361 Н02Р 8/00, (прототип).
4. Микроэлектродвигатели для систем автоматики (технический справочник). Под ред. Э.А.Лодочникова и Ф.М.Юферова. М.: Энергия, 1969.
5. Патент РФ 2065542, МПК 6: F16H 3/44.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ ВРАЩАТЕЛЬНОГО МОМЕНТА (ЕГО ВАРИАНТЫ) И ЕГО СИСТЕМА УПРАВЛЕНИЯ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2322746C2 |
| Устройство для навивки прецизионных спиралей | 1989 |
|
SU1834737A3 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Устройство поворота многошпиндельного барабана токарного автомата | 1979 |
|
SU856661A1 |
| ЭЛЕКТРОПРИВОД ШАГОВЫЙ С ОБРАТНОЙ СВЯЗЬЮ | 2014 |
|
RU2553657C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРНОЙ СИСТЕМОЙ С ПЛАНЕТАРНЫМ РЕДУКТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2236079C2 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2630567C1 |
| ЭЛЕКТРОПРИВОД ШАГОВЫЙ | 2012 |
|
RU2497269C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
Изобретение относится к электротехнике и может быть использовано для сообщения прецизионного поворота, вращательного или колебательного движения различным механизмам в большом диапазоне углов и угловых скоростей. Технический результат состоит в расширении динамического диапазона скоростей вращения выходного вала, повышении надежности, точности скорости вращения и обеспечении возможности поворота выходного вала на заданный угол при одновременном упрощении. Электропривод содержит шаговый электродвигатель, вал которого связан через редуктор с выходным валом электропривода. Дополнительный электродвигатель кинематически связан с выходным валом электропривода ременной передачей, а развиваемый им на выходном валу вращающий момент больше момента трения на выходном валу, но не превышает вращающего момента на выходном валу от шагового электродвигателя. Система управления электроприводом содержит источник питания постоянного напряжения, шаговый электродвигатель с блоком управления шаговым электродвигателем, дополнительный электродвигатель с переключателем направления его вращения. Блок управления шаговым электродвигателем снабжен управляющими выходами, а его вход соединен с источником питания постоянного напряжения. Дополнительный электродвигатель через переключатель направления вращения подключен к дополнительному источнику питания, его управляющие входы соединены с управляющими выходами блока управления шаговым электродвигателем. 2 н.п. ф-лы, 4 ил.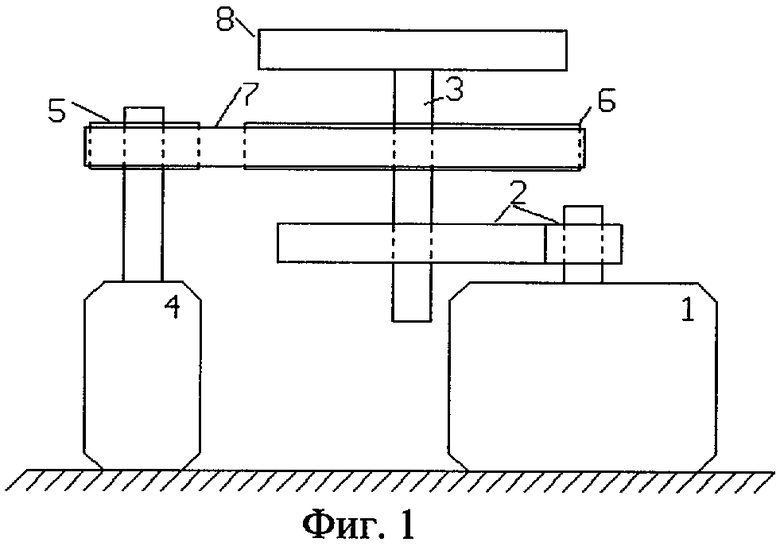
| RU 2002361 C1, 30.10.1993 | |||
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1988 |
|
RU2065542C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2252347C2 |
| Прицел для бомбометания с летательных аппаратов, определяющий путевую скорость ееинрованием по некоторой точке в течение определенного промежутка времени | 1927 |
|
SU17750A1 |
| US 4853839 А, 01.08.1989. | |||

