1
Изобретение относится к станкостроению и может быть использовано на токарных многошпиндельных станках-автоматах в различных отраслях машиностроения и приборостроения.
Известно устройство, предназначенное для уменьшения силовой нагрузки цепи мальтийского механизма многошпшщельного токарного автомата и представляющее собой дополнительный кулачковый вал, кинематич -ски соединенный с барабаном, кулачки которого взаимодействуют с подпружиненными толкателями таким образом, что упругие силы пружин противодействуют силам инерции барабана 1).
Однако это устройство требует усложнения конструкции автомата, увеличения его металлоемкости.
Известен способ поворота многоитиндельного барабана токарных станков-автоматов, состоящий в том, что в процессе поворота барабана производят торможение и разгон шпинделей таким образом, что угловые ускорения шпинделей и барабана имеют противоположные направления. Способ предусматривает использование кинематической цепи привода вращения шпинделей для передачи усилий на барабан при его повороте и, тем самым, уменьшение силовых нагрузок цепи мальтийского механизма.
Для реализации этого способа используется электрический командоаппарат токарных многоитиндельных автоматов, представляющий кулачковый вал, кинематически связанный с распределительным валом станка, а кулачки командоаппарата находятся во взаимодействии с переключателями электрических контактов и обеспечивают управление исполнительными электрическими устройствами: электродвигателями и электромуфтами. Он позвояяр.т производить отключение, торможение и пуск (раз гон) электродвигателя главного привода согласованно с процессом поворота многошпиндельного барабана 2.j.
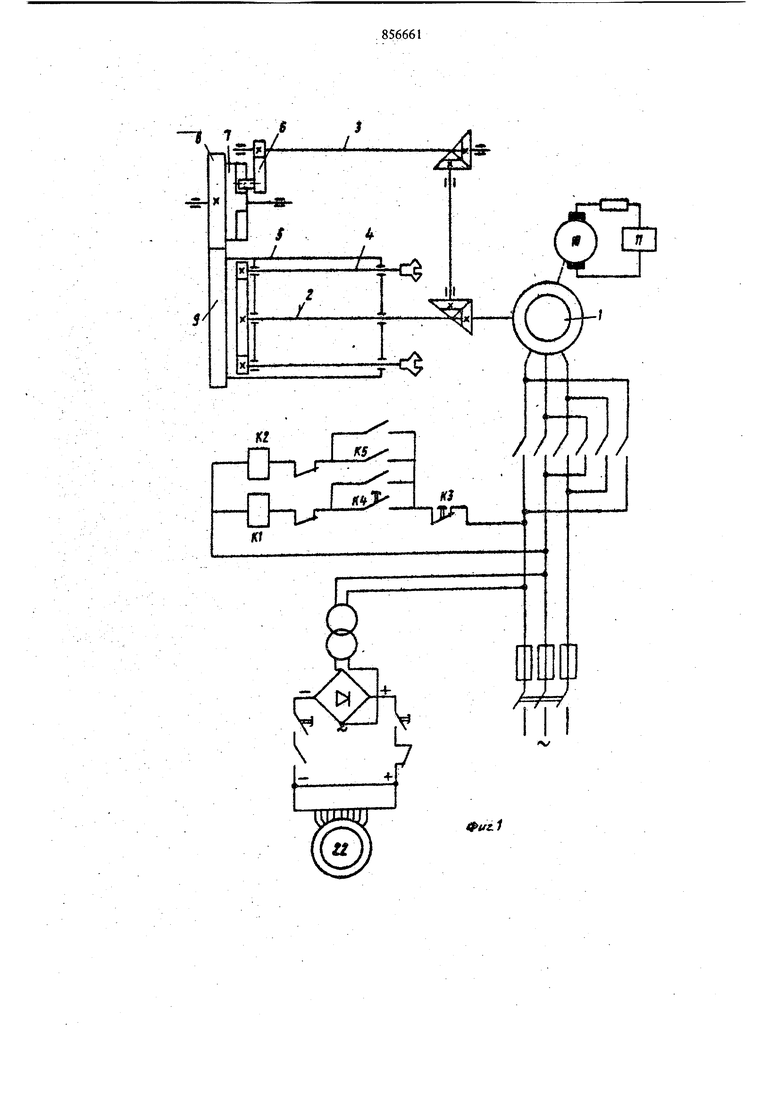
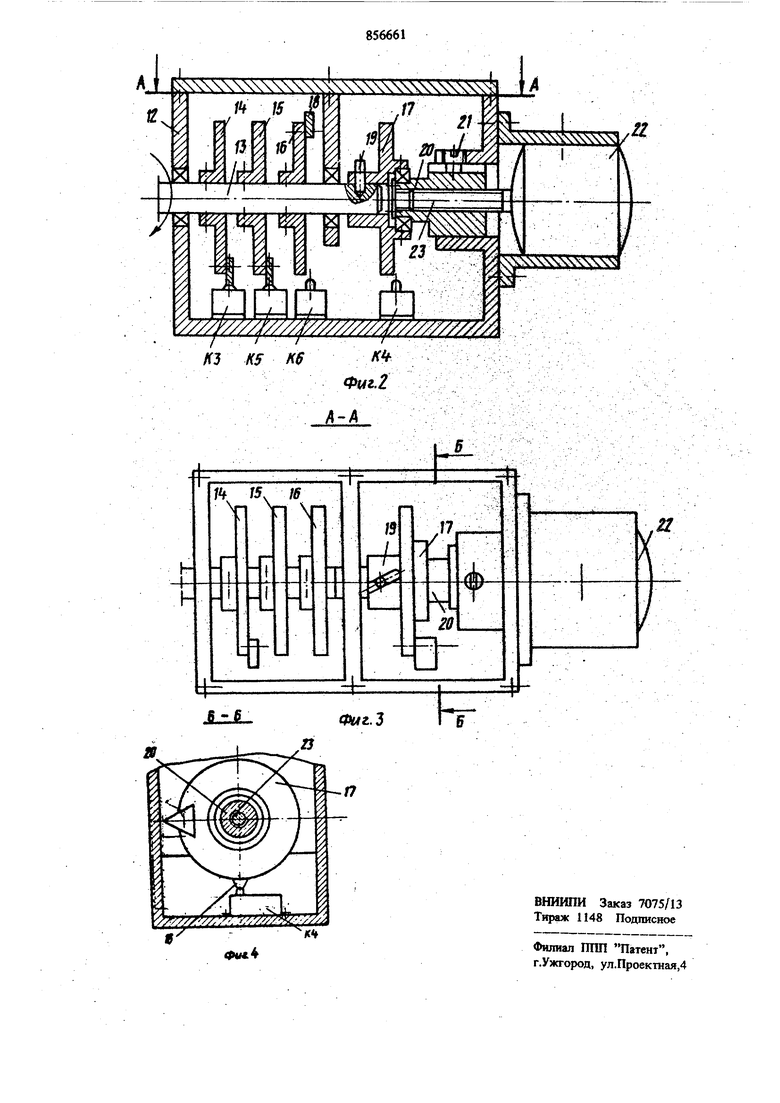
Однако известное устройство не обеспечивает в реальных условиях вследствие непостоянства сил трения в механизмах приводов станка и моментов инерции вращающихся шпинделей с прутковыми заготовками соответствия во времени между продолжительностью .периода поворота многошпиндельного барабана и продолжительностью процесса неустановившегося движения вала электродвигателя главного привода при его торможении и разгоне. В связи с этим если выход электродвигателя на постоянную угловую скорость вращения происходит раньше, чем закончится поворот барабана, исчезают угловые ускорения шпинделей и прекращается с их стороны передача на барабан инерционных сил, разгружающих мальтий ский механизм. Если поворот барабана заканчивается раньше, чем разгон электродвигателя главного привода (привода вращения итиндепей и распределительного вала станка), происходит нежелаемое воздействие на барабан в момент его остановки и фиксации инерционных сил шпинделей. Это уменьшает надежность устройства. Целью изобретения является повышение надежности. Поставленная цель достигается тем, что в электрическом командоаппарате для управления двигателем главного привода станка (вращения шпинделей и подач) на кулачковом валу жестко укреплены три кулачка соответственно для разрыва цепи питания, вкГпючения противотока, подачи сигнала в конце поворота барабана мальтийским механи мом, а один кулачок для включения рабочего движения (пуска) установлен подвижно относительно его вала и кинематически соединен с валом шагового двигателя с возмож ностью кругового смещения кулачка при повороте вала щагового электродвигателя. При этом для управления шаговым двигателем используются реле угловой скорости дви гателя главного привода с парой размыкающих и парой замыкающих электрических кон тактов и переключатель кулачка для подачи сигнала в конце поворота барабана с двумя парами замыкающих контактов таким об разом, что каждая пара контактов реле скорости и переключателя подключена последовательно в каждую из двух электрических линий подачи питания на шаговый электродв гатель. Благодаря Этому, в конце каждого цикла поворота барабана . вал щагового двигателя оказывает регулирующее воздействие на поло жение кулачка пуска электродвигателя главного привода, уменьшая рассогласование во времени на последующем цикле между моментами конца разгона электродвигателя глав ного привода и конца поворота барабана. На фиг. 1 показаны кинематическая и электрическая схемы устройства поворота миогощциндельного барабана токарного автом та; на фиг. 2 - злектрический комаадоаппа84 ат, продольный разрез; на фиг. 3 - разрез -А на фиг. 2; на фиг. 4 - разрез Б-Б а фиг. 3. Устройство поворота многощтшдельного баабана токарного автомата содержит электровигатель 1 главного привода, вал которого оединен с центральным валом 2, а также осредством зубчатых передач - с распредеительным валом 3. Центральный вал 2 поредством зубчатых, передач кинематически сое-. динен со шпинделями 4, установленными в одшипниках мяогошпиндельного барабана 5. а распределительном валу 3 укреплен криошип 6 мальтийского механизма, взаимодействующий с мальтийским крестом 7, выполненным заодно с шестерней 8, зацепляемой с шестерней 9 барабана. Электродвигатель I главного привода снабжен магнитным пускателем, содержащим токовые реле К1 и К2, стоповую кнопку КЗ, кнопку К4 пуска вперед, кнопку К5 пуска назад (включения противотока) . Вал электродвигателя 1 механически соединен с валом тахогенератора 10 прибором для измерения угловой скорости, снабженным реле 11 контроля скорости с одной парой замыкающих электрических контактов при достижении двигателем 1 номинальной угловой скорости и одной пары размыкающихся электрических контактов. Предлагаемое устройство также включает электрический, командоаппарат, представляющий собой установленный в корпусе 12 на подшипниках и кинематически соединенный с распределительным валом 3 станка кулачковый вал 13, на котором жестко укреплены кулачок 14 выключения питания электродвигателя 1, кулачок 15 для включения противотока на электродвигатель 1, кулачок 16 вьщачи сигнала о конце поворота барабана, кулачок 17 включения пуска двигателя 1 установлен на валу 13 подвижно. Каждый из кулачков вьшолнен в виде одинаковых дисков, на которых укреплены одниаковые упоры 18, причем на диске кулачка 14 имеются два упора, а на дисках кулачков 15 и 16 - по одному упору. На диске кулачка 17 укреплен упор с более развитым размером вдоль оси вала 13. Кулачок 17 кинематически соединен с валом 13 посредством пальца 19, помещенного в криволинейный паз на цилиндрической части этого кулачка. Каждый из кулачков предназначен для воздействия на размещенные нод ними соответственно стоповую кнопку КЗ, кнопку К5 включения противотока, кнопку конечного выключателя Кб с двуМя парами замыкающихся электрических контактов, пусковую кнопку К4. В корпусе 12 соосно валу 13 установлена подвижно в осевом направлении гайка 20, имеющая наружный продольный паз, сопрягаемый с пальцем 21 корпуса. Гайка 20 своим левым концом соединена вращательно подвижно с кулачком 17 посредством шарикоподаштника. Соосно кулачковому валу 13 в корпусе 12 жестко укреплен шаговый электродвигатель 22, вал 23 которого имеет наружную резьбу, сопрягаемую с внутренней резьбовой поверхностью гайки 20. Шаговый электродвигатель снабжен блоком переключения обмоток шагового двигателя при его вращении в обоих направлениях. К двум входам блока, обозначенным + и. -., подведены от источника постоянного тока две электрические линии, в каждую из которых последовательно соединены по одной паре кон тактов реле 11 скорости и конечного выклю чателя Кб. Устройство работает следующим образом. Вал электродвигателя 1 главного привода, центральный вал 2, шпиндели 4, распределитель ный вал 3 автомата и кинематически связанкый с ним передаточным отношением,, равным единице, кулачковый вал 13 командоаппарата вращаются с постоянной угловой скоростью вследствие предварительного нажатия оператором на пусковую кнопку К4. Через катушку токового реле К1 проходит ток, замыкающие контакты реле замкнуты, а размыкающи разомкнуты. В момент начала поворота барабана 5 мал тийским механизмом один из двух упоров 1 кулачка 14 нажимает на стоповую кнопку К размыкает на мгновение ее контакты, входящие в схему магнитного пускателя электродвигателя 1, обесточивает реле К1, отключая подачу питания через его контакты. В резуль тате этого вал электродвигателя 1 уменьшает свою угловую скорость за счет преодоления сил трения движущихся по инерции деталей станка, кинематически связанньтх с валом электродвигателя 1. Для увеличения эффекта торможения вала электродвигателя предусмотрен кулачок 15, кото| ый с некоторым опозданием относительно кулачка 14 нажимает на кнопку К5 пуска электродвигателя 1 в обратную сторону (или- торможения противотоком), замыкая ее контакты. При этом по катушке токового реле К2 проходит ток и его замыкающие контакты замыкаются, подключая к электродвигателю 1 противоток. В результате замедленного вращения вала электродвигателя 1 и кинематически связан- ных с ним центрального вала 2 со шпинделями 4 возникает в кинематической цепи центрального вала 2 момент сил инерции замеаяенно движущихся шпинделей 4, который через зацепляемые зубчатые колеса вала 2 и Ш;пннд лей 4 передается на барабан 5, способствуя его разгону из состояния покоя в первой фазе поворота барабана. При этом полагается, что направления поворота барабана и рабочего вращения шпинделей совпадают. В конце первой фазы поворота барабана, когда его угловая скорость достигает максимального значения и в дальнейшем следует ее уменьшение до полной остановки барабана, происходит действие кулачка 17 на пусковую. кнопку К4 и разгон (пуск) электродвигателя 1 до приобретения им оптимальной рабочей угловой скорости. Перед нажатием кнопки К4 выполнено воздействие вторым упором кулачка 14 на стоповую кнопку КЗ, и N згнитный пускатель электродвигателя I приведен в состояние, показанное на фиг. 1, где токовые реле KI н К2 обесточены и подача питания к электродвигателю 1 через контакты этих реле прекращена. Таким образом, после замыкания контактов кнопки К4 через реле К) проходит ток, срабатывают замыкающие контакты реле KI и происходит подача питания к электродвигателю I для его рабочего вращения. В результате ускоренного, движения вала электродвигателя 1 и связанных с ним шпшщелей 4 центральный вал 2 действует на шпиндели 4 и барабан 5 крутящим моментом, направленным противоположно его направлению в первой фазе поворота барабана 5, способствуя замедленному движению последнего. Передача усилий на барабан 5 со стороны центрального вала 2 разгружает кинематическую цепь мальтийского механизма и тем сдмым обеспечивает возможность сокращения времени поворота барабана, сохраняя условие прочности деталей станка. В конце второй фазы поворота барабана 5 кулачок 16 действует упором 18 на кнопку конечного выключателя Кб, раз.лн.1кает две пары его контактов соответственно в двух линиях подвода питания постояттым током к шаговому электродвигателю через блок переключения, оповещая о конце поворота барабана 5. В момент вь1Хода электродвигателя .1 Hj оп1имальн;,то рабочую угловую скорость срабатывает реле 11 скорости, в результате чего его Замыкающие контакты замыкаются, а размыкающие - размыкаются. При несовпадении в.о времени моментов замыкания контактор конечного выключателя Кб и срабатывания реле 11 на шаговый двнгатель 22 поступает электрический сигнал положительного либо отрицательного знака, осуществляя поворот вала шагового двигателя на один шаг в прямом или обратном наЛзавлении в зависимости от того, запазды785вает или опережает момент конца разгона электродвигателя 1 момент конца поворота барабана 5. Если момент конца разгона электродвигателя 1 до номинальной угловой рабочей скорости и срабатывание двух пар контактов реле 11 произойдет раньше, чем закончится поворот барабана 5 и замыкание обеих пар конечного выключателя Кб, в момент замыкания контактов выключателя Кб на блок переключения обмоток шагового двигателя 22 поступит отрицательный электрический сигнал (на фиг. 1 знак минус). В результате этого произойдет поворот вала 23 шагового двигателя в сторону его обратного вращения. Если срабатывание контактов реле 11 скорости произойдет позже, чем замыкание контактов выключателя Кб, тогда на блок переключения шагового двигателя поступит сигнал со знаком плюс , и вал 23 шагового двигателя 22 повернется на один шаг в сторо ну его прямого вращения. В результате поворота вала 23 шагового дветателя 22 под действием электрического сигнала со знаком ми нус происходит осевое смещение сопрягаемой с ним гайки 20 и кулачка 17 влево (фиг.2) а также угловое смещение этого кулачка отно сительно кулачкового вала 13 в направлении против рабочего вращения последнего, показанного стрелкой, благодаря тому, что палец 19 вала 13 взаимодействует с криволиней1п 1м пазом нялиндрической части кулачка 17. Этим угловым смещением кулачка 17 автоматически устанавливается более поздний момент действия кулачка 17 на пусковую кнопку К4 с тем, чтобы на последующем цикле поворота барабана момент конца разгона электродви гателя 1 меньше опережал момент конца поворота барабана. При подаче на блок переключения шагового двигателя положительного электрического сигнала через вход, обозначенный знаком плюс, ,и повороте вала 23 шагового двигателя 22 в направлении прямого его вращения на один шаг гайка 20 и соединенный с ней кулачок 17 смещается вправо (фиг. 2) и, благодаря взаимодействию с пальцем 19 своим криволинейным пазом, также смещается в круговом направлении в сторону рабочего вра щения вала 13, показанную стрелкой. Этим достигается на последующем цикле поворота барабана более раннее воздействие кулачка 17 на кнопку К4 и меньшее рассогласование во времени между моментом конца поворота барабана 5 и моментом выхода электродвигателя 1 на номинальную рабочую углог вую скорость. Таким. образом, после каждого цикла повоота барабана производится автоматическая становка кулачка 17, позволяющая практиески обеспечить совпадение во времени проессов торможения-разгона электродвигателя 1 и поворота барабана 5. В процессе тормоения-разгона электродвигателя I он должен оставаться в режиме устойчивой работы. Все это позволяет повьтсить надежность устройства. Формула изобретения Устройство поворота многошпиндельного барабана токарного автомата, содержащее распределительный вал с мальтийским механизмом поворота барабана, центральный вал, соединенный планетарной зубчатой передачей со шпинделями барабана, электродвигатель главного привода, кинематически связанный с центральным и распределительным валами и с реле угловой скорости с парой замыкающих и размыкающих электрических контактов, электрический кулачковый командоаппарат, вал которого кинематически связан с распределительным валим, а одш из кулачков представляет собой датчик положения барабана, взаимодействующий с выключателем, который имеет две пары замыкающих контактов, о тличающееся тем, что, с целью повышения надежности путем сообщения вращающимся шпинделям ускорения, направленного противоположно ускорению шпиндельного барабана, и совмещения во времени процессов торможения-разгона шпинделей и движения барабана, в устройство введены шаговый электродвигатель и кулачки управления пуском и торможением электродвигателя главного привода, которые установлены на валу командоаппарата, причем кулачок управления пуском установлен с возможностью ограниченного поворота вокруг вала и кинематически соединен с валом шагового электродвигателя парой винт-гайка, а в электрических линиях для подачи сигналов на шаговый двигатель последовательно соединены по одной паре электрических контактов, принадлежащих реле угловой скорости, и по одной паре контактов, принадлежащих выключателю, взаимодействующему с датчиком поаожения барабана. Источники информашш, принятые во внимание при экспертизе 1.Авторское свидетельство СССР fP 560731, кл. В 23 Q 5/02, 1974. 2.Авторское свидетельство СССР по заявке N 2758575/25-08, кл. В 23 В 1/00, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для фасонной обточки пуговиц | 1987 |
|
SU1613354A1 |
| Испытательный стенд для стартера двигателя внутреннего сгорания | 1979 |
|
SU855419A1 |
| Пластификатор для разогрева деталей обуви | 1983 |
|
SU1227165A1 |
| Командоаппарат | 1984 |
|
SU1399832A1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| Станок для перфорации труб по вин-ТОВОй лиНии | 1977 |
|
SU841794A1 |
| Сверлильно-резьбонарезной полуавтомат | 1983 |
|
SU1098700A1 |
| УДАРНЫЙ ГАЙКОВЕРТ | 2011 |
|
RU2480323C2 |
| Гайконарезной автомат | 1982 |
|
SU1060363A1 |