Изобретение относится к медицине, к протезированию и может быть использовано в протезах верхних конечностей с тяговым управлением и пассивным (пружинным) схватом.
В качестве аналога рассматриваются конструкции кистей с активным раскрытием и пассивным (пружинным) схватом, управляемые одной тягой, например, кисть 901 [1] или кисть ЛНИИ-52-1 [1].
В качестве прототипа предлагаемой конструкции кисти рассматривается кисть 9549 [2].
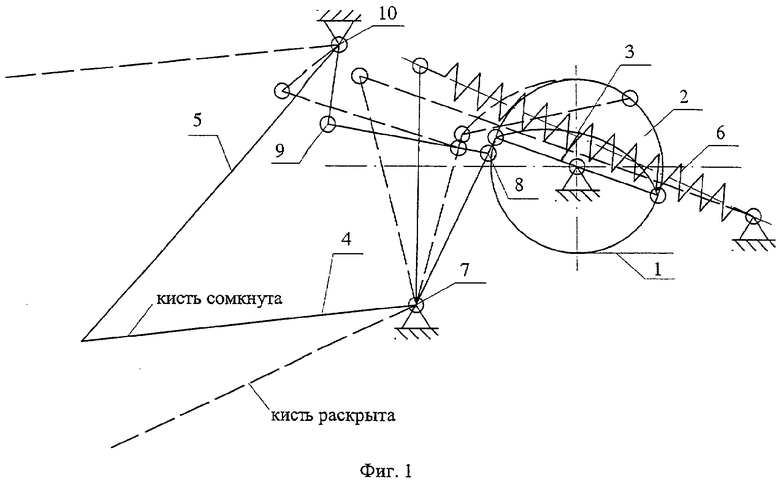
Кинематическая схема кисти 9549 приведена на фиг.1.
При приложении усилия к гибкой тяге 1, закрепленной неподвижно на приводном барабане 2, последний приходит во вращательное движение, которое передается посредством приводного рычага 3 к исполнительному четырехзвеннику 7, 8, 9, 10, соединяющему первый палец 4 и блок II-V пальцев 5. При этом после снятия усилия с тяги 1, под действием пружины 6 звенья механизма совершают движение в обратном направлении и пальцы кисти смыкаются. Пружина 6, кроме возврата в сомкнутое положение, обеспечивает заданное усилие схвата.
Недостатком известных технических решений является то, что усилие в тяге возрастает по мере раскрытия кисти и может достигать значения порядка 80 Н.
Это происходит за счет того, что плечо приводного рычага по мере поворота приводного барабана увеличивается и, наряду с ростом упругой силы пружины, обеспечивающей схват, в большей степени растет усилие в тяге управления.
Кроме того, эти технические решения обладают еще одним недостатком - неопределенностью усилия схвата в сомкнутом положении кисти, в котором приводной рычаг находится в положении вблизи мертвой точки механизма привода и, при малых технологических отклонениях, может мешать полному смыканию кисти.
Задачей изобретения является уменьшение усилия раскрытия кисти, прилагаемого к тяге управления, при обеспечении заданной величины усилия схвата.
Указанная задача решается тем, что в предлагаемом протезе кисти, содержащем подпружиненный четырехзвенный механизм, приводной барабан, приводимый в действие тягой управления, введен кулачок в виде отрезка спирали и опорный ролик, обкатывающийся по кулачку. При этом кулачок жестко соединен с приводным барабаном, а четырехзвенный механизм кинематически связан с опорным роликом.
Кулачок может быть выполнен в виде отрезка логарифмической спирали.
Кулачок может быть выполнен в виде отрезка спирали Архимеда.
Сущность предлагаемого протеза поясняется фиг.2 - конструктивно-кинематической схемой и фиг.3 - результатами расчета усилий в управляющей тяге по ее экскурсии.
На фиг.3 позицией 13 представлено изменение усилия в тяге для кулачка в виде отрезка логарифмической спирали, 14 - для кулачка в виде отрезка спирали Архимеда и 15 - для рычажного привода, характерного для прототипа.
Протез кисти включает приводной барабан 2, жестко соединенный с кулачком 11, опорный ролик 12, кинематически связанный с исполнительным четырехзвенным механизмом 7, 8, 9, 10, соединяющим первый палец 4 с блоком II-V пальцев 5, пружину 6, обеспечивающую усилие схвата, и управляющую тягу 1, жестко закрепленную на приводном барабане 3, осуществляющую передачу управляющего усилия к механизму кисти.
Из конструктивно-кинематической схемы предлагаемой конструкции видно, что введены кулачок 11 и опорный ролик 12, осуществляющие связь приводного барабана 2 с исполнительным четырехзвенным механизмом 7, 8, 9, 10, соединяющим первый палец с блоком II-V пальцев. Фиксация кисти в сомкнутом положении достигается пружиной схвата 6, раскрытие кисти происходит при приложении усилия к тяге управления 1.
При приложении усилия к тяге управления 1 она приводит во вращение приводной барабан 2, которое через кулачок 11, закрепленный на приводном барабане, передается посредством давления на опорный ролик 11 к исполнительному четырехзвеннику 7, 8, 9, 10, соединяющему первый палец 4 и блок II-V пальцев 5.
После снятия усилия с тяги 1, под действием пружины 6 звенья совершают движение в обратном направлении и пальцы кисти смыкаются.
Благодаря отсутствию приводного рычага 3 прототипа достигается полная определенность усилия схвата в сомкнутом положении кисти.
Подбор положения оси опорного ролика на рычаге первого пальца и радиуса опорного ролика позволяет получить минимальное значение плеча силы опорного ролика относительно оси вращения приводного барабана, что минимизирует усилие в управляющей тяге.
Для выбора формы кулачка были проведены расчеты усилия в управляющей тяге по ходу экскурсии для логарифмической и архимедовой спиралей, представленные на фиг.3 позициями 13, 14 соответственно.
Позицией 15 представлены усилия для кисти-прототипа.
Предпочтение отдается логарифмической спирали, так как у нее сохраняется угол между радиус-вектором в точке касания к касательной, в то время как у архимедовой спирали этот угол возрастает по мере увеличения угла поворота, за счет чего плечо силы реакции возрастает больше, чем у логарифмической спирали при равных начальных условиях.
Как явствует из фиг.3, введение кулачкового механизма с кулачком в форме отрезка логарифмической спирали гарантирует не менее, чем двукратное снижение усилия в тяге управления.
Литература
1. Коротков П.А. Исследования механизмов искусственных кистей. - Диссертация, Л., ЛНИИП, 1952.
2. Каталог протезных полуфабрикатов инструмента, оборудования и приспособлений. - М., 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ КИСТИ | 2006 |
|
RU2325876C2 |
| Протез кисти | 1981 |
|
SU986416A1 |
| ИСКУССТВЕННАЯ КИСТЬ | 2006 |
|
RU2341233C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2001 |
|
RU2271778C2 |
| БИОМЕХАНИЧЕСКИЙ КИСТЕВОЙ ПРОТЕЗ | 2019 |
|
RU2731607C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2009 |
|
RU2416380C2 |
| Искусственная кисть | 1986 |
|
SU1438766A1 |
| Протез предплечья | 1984 |
|
SU1217403A1 |
| Искусственная кисть | 1979 |
|
SU825063A1 |
| ИСКУССТВЕННАЯ КИСТЬ | 1973 |
|
SU388744A1 |

Изобретение относится к медицине, а именно к протезированию, и может быть использовано в протезах верхних конечностей с тяговым управлением и пассивным (пружинным) схватом. Протез кисти содержит подпружиненный четырехзвенный механизм, приводной барабан, приводимый в действие тягой управления, кулачок и опорный ролик, обкатывающийся по кулачку. Кулачок выполнен в виде отрезка спирали и жестко соединен с приводным барабаном. Четырехзвенный механизм кинематически связан с опорным роликом. Техническим результатом изобретения является уменьшение усилия раскрытия кисти, прилагаемого к тяге управления, при обеспечении заданной величины усилия схвата. 2 з.п. ф-лы, 3 ил.
| Каталог протезных полуфабрикатов инструмента, оборудования и приспособлений | |||
| - М., 1976 | |||
| Протез кисти | 1981 |
|
SU986416A1 |
| 1972 |
|
SU409715A1 | |
| Активный протез кисти с эластичным телом | 1956 |
|
SU116105A1 |
| Искусственная кисть | 1987 |
|
SU1417872A1 |
| US 4364593 А, 21.12.1982 | |||
| Устройство для передачи цилиндрических изделий | 1984 |
|
SU1175830A1 |
| US 5800571 А, 01.09.1998 | |||
| NL 9401660 A, 01.05.1996 | |||
| СПОСОБ НАСТРОЙКИ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 0 |
|
SU238665A1 |
| Технология | |||

