Заявляемый биомеханический кистевой протез из биосовместимых материаловотносится к медицинской технике и может быть использована длясоздания протезов кисти руки, пригодных для длительной эксплуатации, стойких к износу и обеспечивающих возможность максимального возвращения утраченной функциональности кисти. Необходимость решения таких задач возникает после ампутации кисти,либо в результате несчастного случая и остается актуальной проблемой медицинской техники.
Известен протез кисти, который содержит подпружиненный четырехзвенный механизм, приводной барабан, приводимый в действие тягой управления, кулачок и опорный ролик, обкатывающийся по кулачку - патент RU 2 322 956C2 (автор Киселев Л. И.). Однако данный кистевой протез не обеспечивает повышенной грузоподъемности и корреляции движения кисти, а также не позволяет должным образом контролировать и удерживать угол поворота пальцев и силу захвата.
Также известен протез кисти, который содержит приемную гильзу, корпус, каркас первого пальца, каркасы второго-четвертого пальцев, приводную систему, обеспечивающую функциональную подвижность: «схват-раскрытие кисти», шарнир сгибания в лучезапястном сочленении, манжету на предплечье, три потенциометра, три преобразователя сигнала, сумматор, два функциональных преобразователя и четыре усилителя мощности - патент RU 2 506 931 C2 (авторы Буров Г.Н, ФёдоровЕ.А). Однако и этот кистевой протез не обладает возможностью управления движением большого пальца, что существенно снижает функциональные возможности протеза,не позволяя полноценно использовать захват предметов, тем более не позволяя выполнять функции протеза, связанные с необходимостью жесткого захвата. Кроме того, известный протез не может обеспечить высокую надежность и удобство при использовании.
Наиболее близким к заявляемому решению биомеханического протеза кисти является известный (патент RU 2416379 C2, автор ПухгаммерГрегор) кистевой протез с устройством для передачи усилий, имеющий основание, на котором по меньше мере, один пальцевой протез шарнирно установлен с возможностью движения вокруг оси поворота посредством привода, соединенного с ним через устройство для передачи усилий, которое выполнено между приводом и пальцевым протезом. Однако данная модель кистевого протеза (с устройством для передачи усилий) не обладает достаточной прочностью конструкции и имеет недостаточную двигательную базу, так что известный кистевой протез непригоден для обеспечения повышенной износостойкости, повышенной грузоподъемности и функциональности кистевого протеза.
Заявляемое устройство направлено на решение проблемы создания функционального биомеханического кистевого протеза, позволяющего восстанавливать утраченные функции кисти и обеспечивающего прочность конструкции, повышенную грузоподъемность и износостойкость. Технический результат, достигаемый при реализации заявляемого устройства, заключается в создании устройства с повышенной прочностью, грузоподъемностью, износостойкостью с расширением за счет этого функциональности устройства.
Активный биомеханический кистевой протез, характеризующийся тем, что содержит:
− по крайней мере один двухсуставный внешний цилиндр в форме пальца, состоящий из трех последовательно соединенных полых цилиндров, в каждом двухсуставном цилиндре размещен внутренний двухсуставный стержень из трех последовательно скрепленных между собой (например, сквозной заклепкой) стержней с обеспечением возможности сгибания внешнего двухсуставного цилиндра;
− выполненное с возможностью поворота цилиндрическое колесо со спиральной прорезью для перемещения поперечного стержня, задающего ход движения связанному с ним нижнему внутреннему стержню и среднему полому внешнему цилиндру;
− установленные на колесо салазки в виде скоб с прорезями для движения поперечного стержня, скрепляющие мотор и палец;
− по крайней мере один мотор, прикрепленный к основанию кисти и приводящий в движение цилиндрическое колесо за счет сигналов с датчиков давления, установленных на поверхности остаточных мышц руки.
Поперечный стержень протеза может быть соединен с каждым нижним внутренним стержнем, а каждый нижний внешний полый цилиндр имеет продольные прорези для движения поперечного стержня. Такое исполнение представляет собой вариант выполнения связи между нижним из полых цилиндров и нижним внутренним стержнем, а также поперечных стержнем, который задает ход движения указанных цилиндра и внутреннего стержня.
При формировании кисти элементы протеза могут быть установлены следующим образом. Средний, безымянный пальцы и мизинец, пронизанные одним поперечным стержнем, устанавливают на одних салазках с цилиндрическим колесом и мотором. При этом указательный и большой пальцы, пронизанные общим поперечным стержнем, могут быть размещены на отдельных салазках с колесом и мотором, причем указательный палец крепится в центре, а большой – сбоку.
Протез устанавливается с помощью неинвазивного закрепления на предплечье, посредством жесткого экзокрепления поверх лучевой и плечевой костей, оставшихся после утраты кисти. Двигательной базой является мотор, прикрепленный к основанию пальца, приводящий в движение цилиндр (цилиндрическое колесо) со спиралеобразной прорезью.
Управление протезом биомеханического пальца осуществляется с помощью мотора и аппаратно-программной системы, которая подключается к мышцам, что позволяет получать данные напрямую с мышц руки, считывать их напряжение и коррелировать их в степень положения и движения тех или иных пальцев. Таким образом реализуется механизм движения пальцев, который перераспределяет нагрузку с мотора, приводимого в движение датчиком давления, закрепленным на лучевой мышце и мышце локтевого сгибателя запястья, соразмерно давлению, оказываемому мышцей на датчик давления.Это позволяет вернуть основной функционал утраченной кисти,увеличивает предельно допустимую нагрузку на палец до 30 кг и обеспечивает необходимый технический результат,а именно:функциональность в использовании, высокую прочность конструкции, повышенную грузоподъемность иизносостойкость кистевого протеза.
Заявляемое решение увеличивает предельно допустимую нагрузку на один палец до 30 кг, что достигается за счет перераспределения нагрузки с двигательной базы на конструкцию. Многофункциональность в использовании - поднятие тяжелых предметов, возможность осуществления движений, приближенных к точным движениям человеческой кисти - обеспечивается высокой прочностью конструкции, износостойкостью кистевого протеза. Также конструкция обладает улучшенной мелкой моторикой, что позволяет расширить потенциал использования устройства.
Сущность заявляемого решения поясняется чертежами, где изображены:
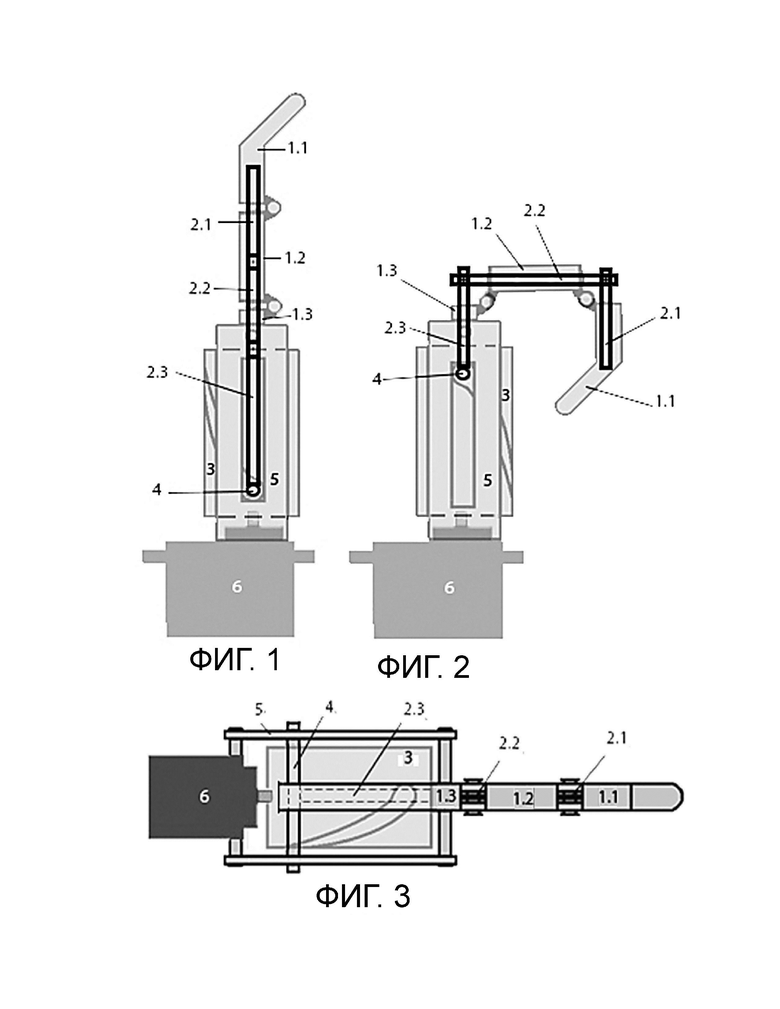
- на фиг. 1 - механизм пальца, вид спереди,
- на фиг. 2 - механизм пальца, вид сбоку,
- на фиг. 3 - механизм пальца, вид сбоку в максимально согнутом состоянии
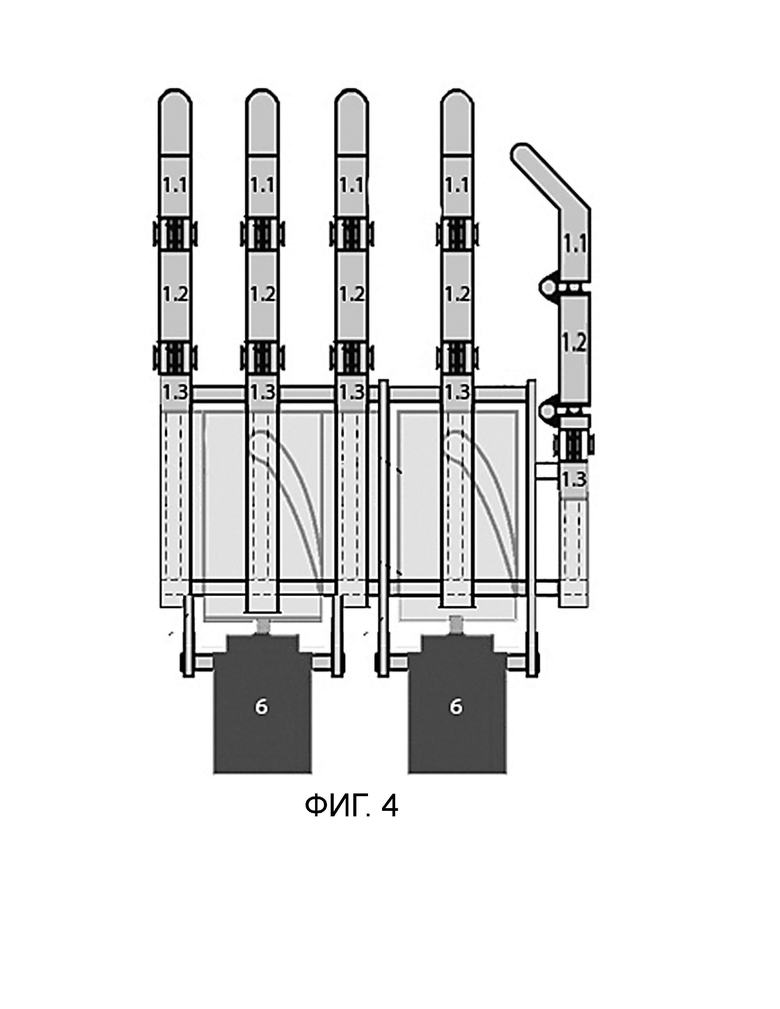
- на фиг. 4 - механизм кисти с просвеченым механизмом
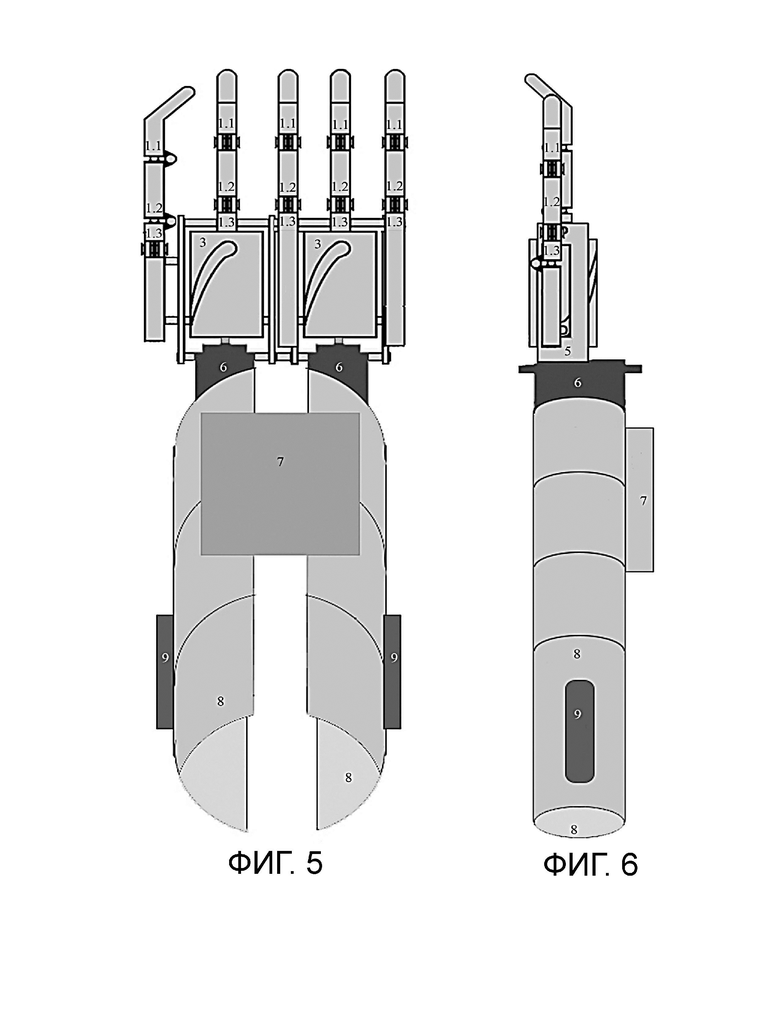
- на фиг. 5 - механизм кисти с креплениями
- на фиг. 6 - механизм кисти с креплениями вид сбоку
На фигурах приняты следующие обозначения: 1 – внешние цилиндры (1.1, 1.2, 1.3), 2 – внутренние стержни (2.1, 2.2, 2.3), 3 – цилиндрическое колесо со спиральной прорезью, 4 – поперечный стержень клемма, 5 – салазки, 6 – сервомотор, 7 – аппаратно-программная система , 8 - жесткое экзокрепление , 9 – датчик давления (тензодатчик).
Для подтверждения возможности реализации заявляемым решением своего назначения и достижения заявленного технического результата рассмотрим вариант исполнения протеза.
Заявляемый биомеханический протез при формировании полной кисти руки имеет изготовленные из медицинского пластика, титана, тантала или биосовместимых сплавов, пять двухсуставных цилиндров 1 в форме пальцев с внутреннимидвухсуставными стержнями 2, движение которых обеспечивают моторы 6.
Основными элементами, задающими ход кисти, являются цилиндрическое колесо с поперечным стержнем 3, вставленным вспиралеобразные прорези. Колесо 3 толкает поперечный стержень 4, движущийся по спирали прорези, и формирует тем самым механизм перераспределения нагрузки с управляющих моторов 6 на конструкцию протеза.Фиксацию всей конструкции и обеспечение ее прочности и целостности осуществляют салазки 5.
Управление протезом осуществляется с помощью моторов 6, в частности, сервомоторов, и аппаратно-программной системы, которая подключается к мышцам. Сервомоторы 6 приводятся в движение датчиками давления (тензодатчиками), закрепленными на лучевой мышце и мышце локтевого сгибателя запястья как наиболее предпочтительных для расположения датчиков. Движение производится соразмерно давлению, оказываемому мышцей на тензодатчик.
Протез устанавливается с использованием неинвазивного закрепления на предплечье посредством жесткого экзокрепления поверх лучевой и плечевой кости, оставшихся после утраты кисти. Система подключается к мышцам, что позволяет получать данные напрямую с мышц руки, считывать их напряжение и коррелировать их в степень положения и движения тех или иных пальцев. Это позволяет расширить возможности для управления и применения конструкции в различных условиях и обеспечивает улучшенные мелкомоторные функции конструкции, что увеличивает потенциал использования в решении повседневных задач.
Каждый палец протеза имеет три основных, стилизованных под фактуру человеческих пальцев, полых цилиндра 1.1, 1.2, 1.3, из которых цилиндр 1.1 является совмещенной заменой дистальной и средней фаланги крепится к цилиндру 1.2, который является заменой проксимальной фаланги. Цилиндр 1.2 крепится к цилиндру 1.3, который является заменой пястной кости. Также цилиндр 1.3 имеет продольные прорези по бокам для движения поперечного стержня 4 клеммы, соответствующиедиаметру поперечного стержня 4.
Три внутренних цилиндрических стержня 2.1, 2.2, 2.3последовательно скреплены между собой. При этом стержень 2.1 является сгибателем цилиндра 1.1 и крепится сквозной заклепкой к стержню 2.2, который является сгибателем цилиндра 1.2. Цилиндрический стержень 2.2 крепится сквозной заклепкой к стержню 2.3 (является направляющей движения стержней 2.1 и 2.2),который, в свою очередь, крепится к поперечному стержню/клемме 4, который задает движение стержню 2.3.
Поворот цилиндрического колеса3со спиральной прорезью, в которую вставлен стержень 4, обеспечивает движение стержня 4 вверх - вниз, и,соответственно,движение прикрепленных к нему стержней2.3, 2.2, 2.1 в соответствующем порядке, по прорезям в цилиндре 1.3 и прорезям салазок 5.
Салазки 5 выполнены в виде скобс прорезями для движения поперечного стержня 4, скрепляющих мотор 6 и пальцы. С верхней стороны салазки 5 прикреплены к цилиндру 1.3, а с нижней – к корпусу сервомотора 6. Прорези в салазках параллельны стенкам цилиндрического колеса 3 и прорезям в цилиндре 1.3. Салазки 5 служат также дополнительной опорой поперечного стержня 4 и задают ему движение.
Сервомотор 6 прикреплен к нижней круглой стенке цилиндра цилиндрического колеса 3со спиральной прорезью и обеспечивает движение посредством поворота колеса 3 от 0 до 360 градусов.Врезультате стержень 4 движется по спиральной прорези в цилиндрическом колесе 3 и задает движение внутренним стержням 2.1, 2.2, 2.3. Данные сервомотору 6 о нужном градусе поворота передаются с датчиков давления (тензодатчиков) 9,прикрепленных к поверхности остаточных мышц поврежденной руки,которые обрабатываются аппаратной микропроцессорной системой.
Расположение пальцев на механизме представлено следующим образом. Средний, безымянный и мизинец располагаются на кисти посредством крепления к салазкам5, расположенным по бокамодного из цилиндрических колес 3 со спиральной прорезью, что позволяет поперечному стержню/клемме 4 пронизывать сразу три пястных фаланги механизма 2.3 и обеспечивать одновременное движения трех пальцев посредством движения одного сервомотора 6 соответственно.
Расположение указательного и большого пальца на механизме обеспечивается креплением их ко второму цилиндрическому колесу 3 со спиральной прорезью.Пальцы крепятся к салазкам 5, указательный палец крепится к центру салазок 5, в то время как большой палец крепится сбоку.
Движение пальцев осуществляется одновременно, посредством движения поперечного стержня клеммы4, пронизывающей пястные фаланги большого и указательного пальцев.
Механизм работы большого пальца отличается от механизма работы остальных пальцев наличием дополнительного соединения, повернутого по отношению к остальным на 90 градусов, что позволяет осуществлять движение параллельно кисти для последующего осуществления механизма хвата
Описание работы датчиков и механизм крепления протеза к предплечьюна примере протеза правой руки показан на фиг.5.
Механизм,расположенный в кисти и обеспечивающий движение пальцев, закрепляется на жестком эндоскелетномнаруче, опоясывающем предплечье с двух сторон и повторяющих естественную фактуру строения предплечья конечного пользователя, что достигается путем индивидуальной подгонки самого эндоскелетногонаручя посредством наличия люфта в конструкции, позволяющего наручу плотно прилегать к предплечью путем стягивания гибкими креплениями левую и правую сторону наруча. Это обеспечивает плотное прилегание к предплечью и снижает возможный дискомфорт при ношении.
Программно-аппаратный комплекс представляет собоймикроплату в непроницаемом для жидкости коробе, обрабатывающую сигнал с датчиков и обеспечивающую подачу сигнала на сервомоторы 6.
Элементы управления представляют из себя датчики, преобразующие величинудеформациив удобный для измерения сигнал, принцип работы которых заключается в изменении сопротивления тензорезистора посредством колебания мышц,на которых они расположены.В результате можно вычислить степень деформации, которая будет пропорциональна силе, приложенной к конструкции.
Расположение датчиков обусловлено морфологией оставшихся мышц предплечья. Датчики крепятся налучевой мышце и мышце локтевого сгибателя запястья, сокращение которых считывается и преобразуется в угол поворота цилиндрического колеса со спиральной прорезью, и, соответственно, в степень сжатия пальцев, зависимой от поворота колеса.
Предплечные крепления биомеханического кистевого протеза представлены в виде двух экзоскелетных полуцилиндрических скоб,опоясывающих предплечье со стороны локтевой и лучевой костей, с вмонтированными в них креплениями под программно- аппаратный комплекс и креплениями под датчики, а также собственными мягкими креплениями, стягивающими скобы на предплечье и позволяющими конструкции плотно прилегать к руке, избегая люфта. В конструкции также предполагается возможность установки мягкого крепления, позволяющего дополнительно закрепить механизм на локтевом сгибе. У основания скоб имеются крепления под механизм кисти, что делает конструкцию модульной.
Заявляемый биомеханический протезобеспечивает возможность восстановления функционала утраченной кисти, высокую прочность конструкции, повышенную грузоподъемность (до 30 кг на один палец) и износостойкость кистевого протеза.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| УПРАВЛЯЕМЫЙ ПРОТЕЗ КИСТИ РУКИ | 2020 |
|
RU2754125C1 |
| ПАЛЕЦ ТЯГОВОГО ПРОТЕЗА И УСТРОЙСТВО ПРОТЕЗА КИСТИ И ПРОТЕЗА ПРЕДПЛЕЧЬЯ С ТАКИМИ ПАЛЬЦАМИ | 2020 |
|
RU2759777C1 |
| Механизм ротации кисти | 1990 |
|
SU1801415A1 |
| Способ коррекции ригидной пронационной контрактуры суставов предплечья у детей со спастическим церебральным параличом | 2024 |
|
RU2831339C1 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ КИСТИ | 1998 |
|
RU2131715C1 |
| Протез предплечья | 1989 |
|
SU1732969A1 |
Изобретение относится к медицине. Активный биомеханический кистевой протез содержит по крайней мере один двухсуставный внешний цилиндр, цилиндрическое колесо со спиральной прорезью, салазки, установленные на колесо, и по крайней мере один мотор. Двухсуставный внешний цилиндр выполнен в форме пальца и состоит из трех последовательно соединенных полых цилиндров. В каждом двухсуставном цилиндре размещен внутренний двухсуставный стержень из трех последовательно скрепленных между собой стержней с обеспечением возможности сгибания внешнего двухсуставного цилиндра. Цилиндрическое колесо выполнено с возможностью поворота для перемещения поперечного стержня, задающего ход движения связанному с ним нижнему внутреннему стержню и среднему полому внешнему цилиндру. Салазки выполнены в виде скоб с прорезями для движения поперечного стержня и скрепляют мотор и палец. Мотор прикреплен к основанию кисти и приводит в движение цилиндрическое колесо за счет сигналов с датчиков давления, установленных на поверхности остаточных мышц руки. Изобретение обеспечивает повышенную прочность, грузоподъемность и износостойкость с расширением за счет этого функциональности устройства. 4 з.п. ф-лы, 6 ил.
1. Активный биомеханический кистевой протез, содержащий:
− по крайней мере один двухсуставный внешний цилиндр в форме пальца, состоящий из трех последовательно соединенных полых цилиндров, в каждом двухсуставном цилиндре размещен внутренний двухсуставный стержень из трех последовательно скрепленных между собой стержней с обеспечением возможности сгибания внешнего двухсуставного цилиндра;
− выполненное с возможностью поворота цилиндрическое колесо со спиральной прорезью для перемещения поперечного стержня, задающего ход движения связанному с ним нижнему внутреннему стержню и среднему полому внешнему цилиндру;
− установленные на колесо салазки в виде скоб с прорезями для движения поперечного стержня, скрепляющие мотор и палец;
− по крайней мере один мотор, прикрепленный к основанию кисти и приводящий в движение цилиндрическое колесо за счет сигналов с датчиков давления, установленных на поверхности остаточных мышц руки.
2. Протез по п.1, отличающийся тем, что поперечный стержень соединен с каждым нижним внутренним стержнем, а каждый нижний полый внешний цилиндр имеет продольные прорези для движения поперечного стержня.
3. Протез по п.1, отличающийся тем, что средний, безымянный пальцы и мизинец, пронизанные одним поперечным стержнем, установлены на одних салазках с цилиндрическим колесом и мотором.
4. Протез по п.1 или 3, отличающийся тем, что к отдельным салазкам с колесом и мотором крепится в центре указательный палец и сбоку большой палец, пронизанные общим поперечным стержнем.
5. Протез по п.1, отличающий тем, что внутренние стержни крепятся между собой сквозной заклепкой.
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| US 4921293 A1, 01.05.1990 | |||
| US 5413611 A1, 09.05.1995 | |||
| Электромеханическая кисть | 2017 |
|
RU2663942C1 |
| ИСКУССТВЕННАЯ КИСТЬ С ЭЛЕКТРИЧЕСКИМ СЕРВОПРИВОДОМ | 0 |
|
SU267811A1 |

