Изобретение относится к радиолокационной технике и, в частности, к бортовым РЛС летательных аппаратов (истребителей, вертолетов) и предназначено для обеспечения эффективного различения обнаруженных маловысотных малоскоростных воздушных целей и движущихся наземных целей.
Известны БРЛС указанного класса (G.Morris. L.Harkness, Airbom Pulsed Doppler Radar, Artech House, 1996; Справочник по радиолокации под ред. М.Сколника, т.3, гл.7, "Советское Радио", М., 1977 г.), предназначенные, в частности, для обнаружения воздушных целей (ВЦ) на фоне подстилающей поверхности, в том числе в присутствии движущихся наземных или надводных объектов. Выделение ВЦ в главном луче диаграммы направленности антенны БРЛС достигается за счет пространственной селекции и за счет отличий эхо-сигналов от них по задержке и доплеровской частоте. Обычно спектральная область, в которую попадают эхо-сигналы от движущихся наземных целей, режектируется, в качестве дополнительного средства используется компенсационный (защитный) канал, позволяющий блокировать сигналы наземных целей (НЦ), воздействующих по боковым лепесткам диаграммы направленности. Однако спектры эхо-сигналов малоскоростных воздушных целей перекрываются диапазоном частот, занимаемых движущимися наземными объектами, что приводит к необходимости сужения режектируемой спектральной области для обеспечения возможности обнаружения таких воздушных целей. При этом в области перекрытия диапазонов доплеровских частот воздушных и наземных целей отсутствует возможность различать ВЦ и НЦ по этому параметру.
Существуют способы, позволяющие ослабить этот недостаток. Один из них, т.н. способ пространственно-скоростной селекции (Дудник П.И. Способ обнаружения и выделения низколетящих целей на фоне Земли на основе использования периодических колебаний положения фазового фронта отраженного сигнала, "Военная радиоэлектроника", 1970, 1 (318), стр.3), основан на выделении колебаний фазового фронта поля, являющегося результатом интерференции рассеянного целью излучения БРЛС и отражениями от подстилающей поверхности. Однако этому способу свойствен недостаток, связанный с необходимостью наличия мощного опорного сигнала отражений от подстилающей поверхности, который усугубляется тем, что эти отражения являются пространственно-протяженными, что приводит к расширению спектра биений в анализируемом сигнале. Эти причины обусловливают ограничения в тактике применения БРЛС, например, при работе над гладкой подстилающей поверхностью с зеркальными отражениями, при увеличении высоты полета носителя и/или уменьшении угла наклона антенны.
Из известных технических решений наиболее близким является устройство, описанное в патенте США №4862177, МКИ G01s 13/52; 13/58; US 342-160 (Sung Y. Wong Processor for discriminating between ground and airbom moving targets), основанное на анализе выходного сигнала угломестного канала БРЛС моноимпульсного типа. Основная идея этого технического решения заключается в том, что в каждом элементе представляющего интерес участка развертки дальности производится определение разности двух значений выходного сигнала угломестного дискриминатора, полученных при подаче на его вход значений отсчетов из двух различных участков спектра, преобразованных в частотную область эхо-сигналов. Первый отсчет принадлежит участку, в пределах которого ожидается наличие сигнала, отраженного от подстилающей поверхности и принятого главным лучом антенны. Второй - спектральному отсчету эхо-сигнала от обнаруженного движущегося объекта. Если абсолютная величина разности не превосходит выбранного допуска, то выносится решение об обнаружении НЦ, в противном случае - ВЦ. Полагается, что спектральный отсчет, соответствующий отражениям от подстилающей поверхности, принадлежит участку частотной области, в пределах которого ожидается наличие компонент этого эхо-сигнала, сформированных главным лепестком диаграммы направленности антенны (ДНА). Значение выходного сигнала угломестного дискриминатора при подаче на его вход этого спектрального отсчета является опорным, а зависимость опорных значений от дальности - опорной функцией.
Недостатком прототипа является, как показывает анализ, невозможность правильной селекции ВЦ или НЦ в этом устройстве, когда опорная функция, которая должна характеризовать точечные цели, находящиеся на нулевой высоте (т.е. на подстилающей поверхности), не удовлетворяет этому требованию, как это имеет место, например, в импульсно-доплеровских БРЛС со средней частотой повторения (СЧП) зондирующих импульсов, для которых различение малоскоростных ВЦ и НЦ наиболее актуально. Подстилающая поверхность является пространственно-распределенным отражающим объектом и при работе в условиях неоднозначности наблюдения по задержке и доплеровскому сдвигу реальная опорная функция и опорная функция, полученная по точечному объекту, существенно различаются.
Например, на фиг.1 приведены полученные расчетным путем графики зависимости выходного сигнала угломестного дискриминатора моноимпульсной БРЛС (при амплитудном суммарно-разностном методе пеленгации) от дальности до возможного нахождения цели (номера анализируемого строба дальности) при воздействии на его вход отражений от однородной подстилающей поверхности (штриховая линия с дополнительным обозначением УППП) и эхо-сигнала от точечного наземного объекта при hц=0 (сплошная линия с дополнительным обозначением fаппр(D) - "аппроксимированная функция от дальности D"). Первую зависимость назовем угломестным профилем подстилающей поверхности УППП (она-то и выступает в прототипе в качестве опорной функции для устройства селекции ВЦ/НЦ (дискриминатора ВЦ/НЦ)), вторую - угломестной характеристикой точечной маловысотной цели при hц=0. Эта последняя и должна, по существу, выполнять роль опорной функции, как это и делается в предлагаемом изобретении.
В качестве необходимых для расчета величин использованы параметры типовой РЛС миллиметрового диапазона:
При таких условиях наблюдения диапазон дальностей в пределах пятна, освещаемого лучом антенны на подстилающей поверхности, лежит в интервале Dмин=7.75...Dмакс=95.5 км (по однозначной шкале дальности). Однако оценки выходного сигнала угломестного дискриминатора производятся для стробов, перекрывающих зону приема на развертке дальности, а им присуща неоднозначность соответствия фактическому значению дальности до зондируемого элемента поверхности. На фиг.1 указаны три области неоднозначности с границами (0, Dнеодн), (Dнеодн, 2·Dнеодн), (2·Dнеодн, 3·Dнеодн). К невозможности правильной селекции может привести неопределенность в интерпретации угломестной координаты опорной функции в условиях неоднозначности по дальности наблюдений. На этом же чертеже видно, что из-за искажений опорной функции, возникающих вследствие влияния так называемых альтиметровых отражений и неоднозначности по дальности, селекция ВЦ/НЦ на участке D=7...12 км становится проблематичной.
Задачей изобретения является повышение эффективности различения маловысотных малоскоростных воздушных и движущихся наземных или надводных целей при их обнаружении когерентной моноимпульсной БРЛС. При этом под эффективностью понимается расширение тактических условий (высота полета носителя БРЛС, угол наклона антенны, значение используемой частоты повторения зондирующих импульсов) применения угломестного канала.
Решение поставленной задачи достигается тем, что в устройство, содержащее многоканальный (по числу стробов дальности) обнаружитель когерентного импульсного сигнала в суммарном приемном канале (суммарном приемнике) моноимпульсной БРЛС, каждый стробированный по задержке канал которого включает совокупность узкополосных ("доплеровских") фильтров, перекрывающих диапазон анализируемых доплеровских частот, и пороговых устройств в каждом частотном канале; многоканальный приемник (по числу стробов дальности) угломестного канала моноимпульсной БРЛС с совокупностью доплеровских фильтров для каждого строба дальности, аналогичной совокупности фильтров в приемнике суммарного канала, многоканальное устройство формирования сигнала углового рассогласования (угловой дискриминатор) для выделенных доплеровских фильтров; коммутатор каналов дальности с обнаруженными сигналами от целей; компаратор на базе вычитающего устройства; четыре логических элемента (ЛЭ) "И" и один ЛЭ "ИЛИ" такие, что на выходе первого ЛЭ "И" логическая "1" формируется, если модуль разности сигналов с выхода ВУ не превосходит заданного допуска при обнаружении сигнала от подстилающей поверхности в пределах заданного интервала дальностей, на выходе второго ЛЭ "И" логическая "1", означающая выбор решения "Воздушная цель" (ВЦ), формируется при условии, что обнаруженной цели соответствует логический "0" с выхода первого ЛЭ, на выходе третьего ЛЭ "И" логическая "1", означающая выбор решения "Наземная цель" (НЦ), формируется при условии, что обнаруженной цели соответствует логическая "1" с выхода первого ЛЭ "И", на выходе четвертого ЛЭ "И" логическая "1" формируется при условии обнаружения цели в отсутствие сигнала от подстилающей поверхности в пределах заданного интервала дальностей, на выходе ЛЭ "ИЛИ" формируется логическая "1" при наличии логической "1" с выходов второго и четвертого ЛЭ "И", дополнительно введены семь двухвходовых компараторов, три демультиплексора, один двухканальный мультиплексор, три коммутатора сигнала, два логических элемента "И" и два логических элемента "ИЛИ", вычислитель опорной функции. Компаратор на базе вычитающего устройства и дополнительно введенные элементы устройства объединены в узел, называемый анализатором выходных данных угломестного канала пеленгатора. Назначение введенных функциональных элементов удобнее пояснить, опираясь на блок-схемы и рисунки, приведенные на фиг.1...7.
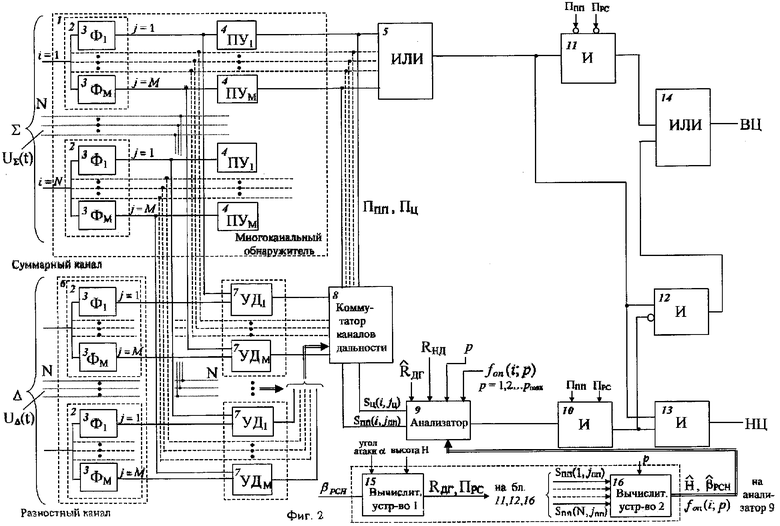
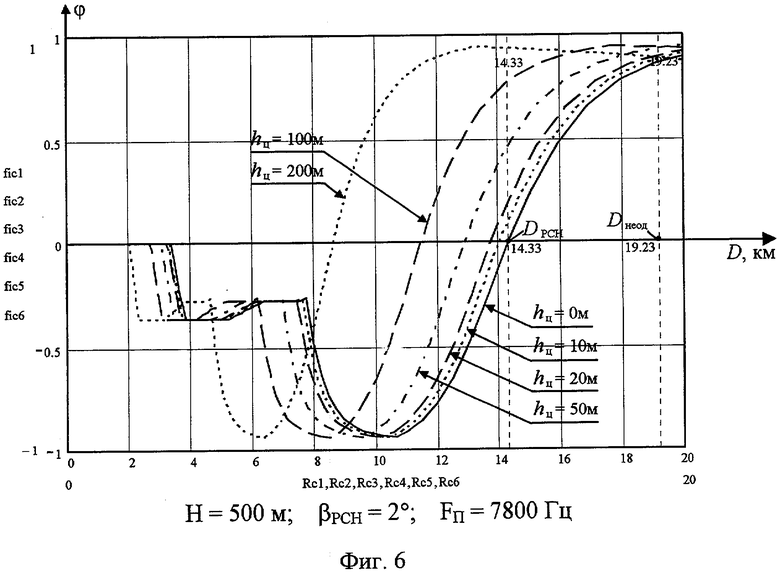
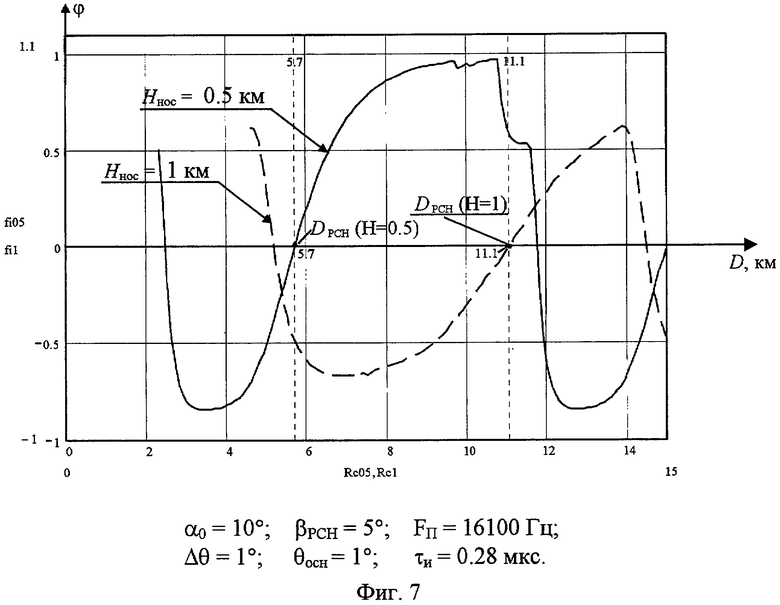
На фиг.1 приведены графики угломестного профиля подстилающей поверхности в пределах интервала однозначности измерений дальности 0...Dнеод и угломестной характеристики точечного объекта на подстилающей поверхности (при hц=0) в пределах участка дальности, равного трем интервалам однозначности 0...3·Dнеод, на фиг.2 изображена блок-схема устройства селекции маловысотных малоскоростных воздушных и движущихся наземных целей, на фиг.3 - блок-схема анализатора выходных данных угломестного канала моноимпульсной БРЛС, на фиг.4 - блок-схема вычислителя опорной функции, на фиг.5 - графики угломестного профиля подстилающей поверхности (УППП) и опорной функции дискриминатора ВЦ/НЦ, построенной на его основе, приведенной к интервалу однозначности по дальности 0...Dнеод, на фиг.6 - графики угломестных характеристик воздушных целей при различных высотах их полета (графики построены в пределах интервала однозначности по дальности 0...Dнеод), на фиг.7 - возможные варианты графиков угловых профилей подстилающей поверхности для различных условий наблюдения, приведенных на интервале 0...Dнеод.
Устройство селекции маловысотных малоскоростных воздушных и движущихся наземных целей для когерентной БРЛС содержит (фиг.2) многоканальный (по числу N стробов дальности) обнаружитель 1 в суммарном канале моноимпульсной когерентно-импульсной БРЛС, включающий наборы 2 из М доплеровских фильтров 3 для каждого строба дальности, совокупность которых перекрывает весь анализируемый диапазон доплеровских частот, пороговые устройства 4 на выходе каждого доплеровского фильтра, многовходовый логический элемент (ЛЭ) "ИЛИ" 5, многоканальное (по числу N стробов дальности) устройство обработки сигналов 6 в разностном угломестном канале моноимпульсной БРЛС, включающее наборы 2 из М доплеровских фильтров 3 для каждого строба дальности, аналогичные наборам фильтров 2 в суммарном канале, угловые дискриминаторы 7 для каждого доплеровского фильтра 3 угломестного канала (многоканальное устройство формирования сигнала угловой ошибки), коммутатор (мультиплексор/демультиплексор) 8, анализатор 9 выходных сигналов угловых дискриминаторов 7, четыре ЛЭ "И" 10, 11, 12 и 13, а также ЛЭ "ИЛИ" 14.
Число стробов дальности N равно отношению периода повторения зондирующих импульсов Тп, определяющего интервал однозначного измерения дальности до цели к длительности стробов дальности, перекрывающих этот диапазон; число доплеровских фильтров М для каждого строба дальности определяется отношением протяженности анализируемого диапазона доплеровских частот к ширине доплеровского фильтра.
Вычислительные устройства (ВУ-1 и ВУ-2) с позициями 15 и 16 соответственно являются частью вычислительной системы БРЛС. В них производятся расчеты необходимых для функционирования заявляемого дискриминатора ВЦ/НЦ величин: Rдг - дальняя граница разрешенной зоны селекции ВЦ/НЦ, Rбг - ближняя граница разрешенной зоны селекции ВЦ/НЦ, Rнд - интервал однозначного измерения дальности, р - порядок неоднозначности, определяемый отношением дальности до цели и интервала однозначности Rнд при используемой частоте повторения зондирующих сигналов, ПРС - признак, указывающий на принадлежность анализируемого строба дальности зоне разрешенной селекции ВЦ/НЦ, fоп(i; р) - опорная функция для анализатора 9.
Необходимые для расчетов значения высоты носителя БРЛС Н, угла атаки летательного аппарата (ЛА) α, угла наклона равносигнального направления антенной системы βрсн поступают с соответствующих датчиков ЛА.
Использованные на фиг.2 остальные обозначения имеют следующий смысл:
- ППП - признак обнаружения подстилающей поверхности, т.е.
признак, характеризующий уровень сигнала от
подстилающей поверхности достаточный для
формирования опорной функции;
ПЦ - признак обнаружения цели;
SЦ(i, jЦ) - сигнал рассогласования с выхода углового
дискриминатора для обнаруженного объекта;
SПП(i, jПП) - сигнал рассогласования с выхода углового
дискриминатора для подстилающей поверхности.
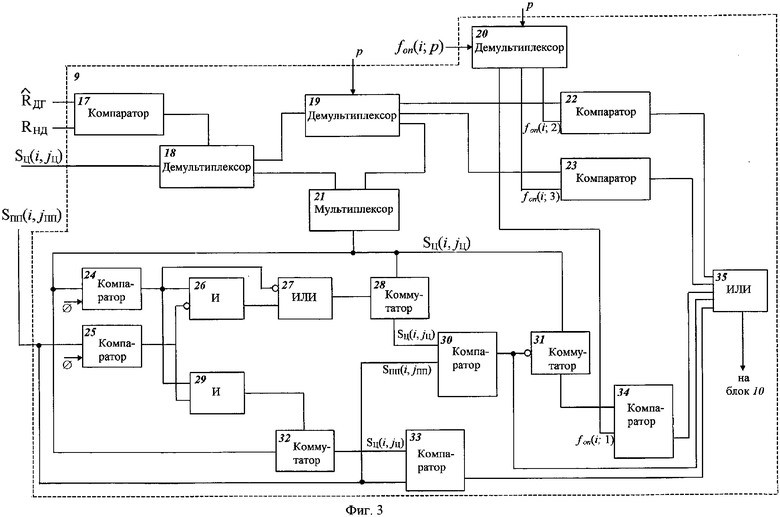
Анализатор 9 выходных сигналов угловых дискриминаторов 7 в свою очередь содержит (фиг.3) компаратор 17, демультиплексоры 18, 19 и 20, мультиплексор 21, компараторы 22, 23, 24 и 25, ЛЭ "И" 26, ЛЭ "ИЛИ" 27, коммутатор 28, ЛЭ "И" 29, компаратор 30, коммутаторы 31, 32, компараторы 33, 34 и ЛЭ "ИЛИ" 35.
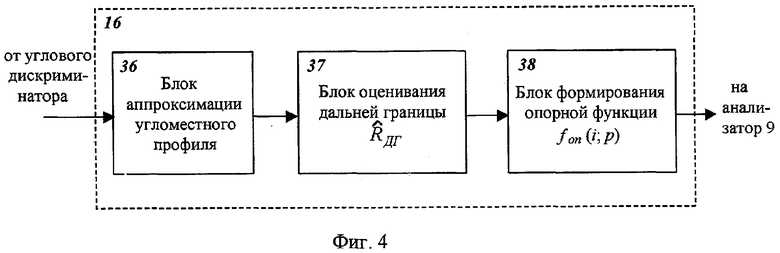
Вычислитель опорной функции 16 (фиг.4) содержит блок аппроксимации угломестной характеристики точечного наземного объекта 36, блок оценивания дальней границы зоны разрешенной селекции 37 и блок формирования опорной функции 38.
Многоканальный обнаружитель 1 (фиг.2) с наборами 2 фильтров 3 и пороговыми устройствами 4, на каждый из N входов которого поступают сигналы с выходов стробированного приемного устройства суммарного канала, предназначен для обнаружения эхо-сигналов цели в выделенной области доплеровского диапазона частот. Часть доплеровских фильтров, накрывающих спектральную область с максимумом спектра отражений от подстилающей поверхности, используется для нахождения фильтра с наибольшим уровнем выходного сигнала.
Каждый из угловых дискриминаторов 7 служит для формирования выходной величины углового рассогласования в вертикальной плоскости S(i, j) направления на обнаруженный объект и равносигнального направления антенной системы согласно выражениям:

Δi, j, ∑i, j - комплексные значения выходных сигналов доплеровских фильтров разностного угломестного и суммарного каналов соответственно при фазовом методе пеленгации,
* - знак комплексного сопряжения;
или

Δa ij, ∑a ij - вещественные значения выходных сигналов доплеровских фильтров разностного (угломестного) и суммарного каналов при амплитудном методе пеленгации;
i - номер строба дальности;
j - номер доплеровского фильтра.
Коммутатор 8, который может быть выполнен в виде мультиплексора/демультиплексора, служит для поочередной подачи на вход анализатора 9 выходных сигналов угловых дискриминаторов всех обнаруженных целей. Анализатор 9 предназначен для определения величины отклонения отсчета угломестной характеристики обнаруженной цели от соответствующего отсчета угломестного профиля подстилающей поверхности или опорной функции. Для этого на него, кроме отсчетов угломестной характеристики цели Sц(i, jц). поступают значение опорной функции fоп(i; p), которая является в общем случае многозначной (имеющей р ветвей), значение угломестного профиля подстилающей поверхности Sпп(i, jпп), значение оценки дальней границы разрешенной области селекции ВЦ/НЦ  величина протяженности интервала однозначности по дальности при использованной частоте повторения импульсов Rнд. Назначение ЛЭ "И" 10, 11, 12, 13, а также ЛЭ "ИЛИ" 14 такое же, как в прототипе, т.е. заключается в отборе лишь тех отметок цели, для которых выполнены условия селекции ВЦ/НЦ: обнаружение сигнала от подстилающей поверхности (признак ППП=1) в пределах допустимого интервала дальностей, т.е. зоны разрешенной селекции (признак ПРС=1) - ЛЭ 10, вынесение решения об обнаружении воздушной цели при выполнении условий для дискриминации ВЦ/НЦ - ЛЭ 12, вынесение решения об обнаружении воздушной цели в случаях, когда эти условия не выполняются - ЛЭ 11, формирование объединенного решения об обнаружении воздушной цели - ЛЭ "ИЛИ" 14, вынесение решения об обнаружении наземной цели - ЛЭ 13.
величина протяженности интервала однозначности по дальности при использованной частоте повторения импульсов Rнд. Назначение ЛЭ "И" 10, 11, 12, 13, а также ЛЭ "ИЛИ" 14 такое же, как в прототипе, т.е. заключается в отборе лишь тех отметок цели, для которых выполнены условия селекции ВЦ/НЦ: обнаружение сигнала от подстилающей поверхности (признак ППП=1) в пределах допустимого интервала дальностей, т.е. зоны разрешенной селекции (признак ПРС=1) - ЛЭ 10, вынесение решения об обнаружении воздушной цели при выполнении условий для дискриминации ВЦ/НЦ - ЛЭ 12, вынесение решения об обнаружении воздушной цели в случаях, когда эти условия не выполняются - ЛЭ 11, формирование объединенного решения об обнаружении воздушной цели - ЛЭ "ИЛИ" 14, вынесение решения об обнаружении наземной цели - ЛЭ 13.
Необходимые для обнаружителя 1 значения ближней Rбг и дальней Rдг границы интервала дальности, соответствующие ближнему и дальнему краям контура на подстилающей поверхности, образующемуся в результате ее пересечения лучом антенны, а также признак ПРС, указывающий на принадлежность анализируемого строба дальности названному интервалу, формируются в вычислительном устройстве, так же, как и в прототипе, входящем в состав БРЛС, по известным формулам с использованием поступающих с бортовых датчиков значений угла отклонения антенны относительно оптической оси, угла атаки летательного аппарата, высоты его полета:
 (0<k<1)
(0<k<1)

Значения Rбг и Rдг рассчитываются с точностью, определяемой точностью бортовых датчиков.
В анализаторе 9 (фиг.3) компараторы 17, 24 и 25 служат для определения условий дискриминации: компаратор 17 - для выявления соотношения значений интервала неоднозначности по дальности Rнеодн и оценки дальней границы разрешенного для различения ВЦ и НЦ интервала дальности Rдг, компаратор 24 - для установления знака выходного сигнала угломестного канала БРЛС для сигнала цели и компаратор 25 - для установления знака отсчета угломестного профиля. Демультиплексор 18 предназначен для переключения направления передачи значения отсчета выходного сигнала углового дискриминатора для обнаруженной цели: на демультиплексор 19 или мультиплексор 21 в зависимости от логического значения выходного сигнала компаратора 17. Демультиплексор 19 предназначен для выбора пути выполнения последующих операций дискриминации в зависимости от поступающего из вычислительной системы БРЛС номера р интервала неоднозначности по дальности для обнаруженной цели (порядка неоднозначности), p=1, 2...рмакс (рмакс=3). Демультиплексор 20 производит выбор ветви опорной функции для компараторов 22, 23, 30, 34 в зависимости от номера интервала неоднозначности. Компараторы 22, 23, 30, 34, а также компаратор 33 служат для определения величины отклонения отсчета угломестной характеристики обнаруженной цели S(i, jц) от соответствующего отсчета опорной функции. Условия решения в указанных компараторах неодинаковы. В компараторах 22, 23, 30 с пороговым значением сравнивается арифметическое значение разности входных сигналов этих компараторов, а в компараторах 33, 34 - модуль разности их входных сигналов. Пороговые значения в компараторах 22, 23, 30, 33 и 34 в общем случае могут быть различны. Мультиплексор 21 служит для канализации по одному пути последующей обработки значения угломестного отсчета обнаруженной цели для двух случаев: 1.  и 2.
и 2.  но значение дальности обнаруженной цели принадлежит первому интервалу неоднозначности по дальности (р=1).
но значение дальности обнаруженной цели принадлежит первому интервалу неоднозначности по дальности (р=1).
Коммутаторы 28, 31, 32 используются для подачи значения угломестного отсчета обнаруженной цели при наличии логической "1" на их управляющих входах на компараторы 30, 34 и 33 соответственно. ЛЭ "И" 29 формирует на своем выходе логическую "1", если значения угломестного отсчета обнаруженной цели и отсчета угломестного профиля подстилающей поверхности для одного и того же элемента дальности неотрицательны. Комбинация ЛЭ "И" 26 и ЛЭ "ИЛИ" 27 формирует на управляющем входе коммутатора 28 логическую "1", если значение угломестного отсчета обнаруженной цели отрицательно, или это значение неотрицательно, но отрицательно значение отсчета угломестного профиля подстилающей поверхности. Многовходовой ЛЭ "ИЛИ" 35 служит для объединения результатов вынесения решения анализатором выходных данных угломестного канала по всем его разветвлениям.
Используемая анализатором 9 опорная функция fоп (i, р) формируется в вычислителе (фиг.4), также входящем в состав БРЛС. Процедура формирования основана на аппроксимации на ограниченном интервале Rниж...Rверх, определяемом по формулам (2), фактически полученного угломестного профиля подстилающей поверхности функцией специального вида fаппр(i), нахождения оценок высоты полета  и угла наклона антенны относительно горизонта
и угла наклона антенны относительно горизонта  экстраполяции указанной функции с использованием этих оценок за пределы исходного ограниченного интервала дальности на весь разрешенный интервал селекции Rбг...Rдг и приведении ее к интервалу однозначности по дальности 0...Rнд путем преобразования в многозначную функцию fоп (i; р) с р ветвями.
экстраполяции указанной функции с использованием этих оценок за пределы исходного ограниченного интервала дальности на весь разрешенный интервал селекции Rбг...Rдг и приведении ее к интервалу однозначности по дальности 0...Rнд путем преобразования в многозначную функцию fоп (i; р) с р ветвями.
Блок аппроксимации угломестного профиля подстилающей поверхности 36 этого вычислителя (фиг.4) служит для получения аппроксимации угломестной характеристики точечной наземной цели по данным отражений от подстилающей поверхности, поступающим с выхода углового дискриминатора. Блок оценивания 37 а уточненного значения дальней границы зоны разрешенной селекции  используется для расчета названной величины по найденным в результате аппроксимации угломестной характеристики оценкам высоты полета носителя БРЛС
используется для расчета названной величины по найденным в результате аппроксимации угломестной характеристики оценкам высоты полета носителя БРЛС  и угла наклона антенны
и угла наклона антенны  Блок формирования опорной функции 38 служит для преобразования аппроксимированной угломестной характеристики точечной наземной цели в опорную функцию для дискриминатора ВЦ/НЦ. Выход блока оценивания дальней границы зоны разрешенной селекции 37 соединен с первым входом второго компаратора 17 (фиг.3). Выход блока формирования опорной функции 38 соединен с входом третьего демультиплексора 20 (фиг.3).
Блок формирования опорной функции 38 служит для преобразования аппроксимированной угломестной характеристики точечной наземной цели в опорную функцию для дискриминатора ВЦ/НЦ. Выход блока оценивания дальней границы зоны разрешенной селекции 37 соединен с первым входом второго компаратора 17 (фиг.3). Выход блока формирования опорной функции 38 соединен с входом третьего демультиплексора 20 (фиг.3).
Вычисления в блоке аппроксимации угломестного профиля 36 проводят с использованием формул (3)...(6). Начинаются они с нахождения на оси дальности вблизи RРСН нулевого значения угломестного профиля подстилающей поверхности (УППП) одним из известных способов, например путем перебора его значений и отбора ближайшего к 0, и соответствующего ему строба дальности. Значение дальности R0≈RРСН для найденного строба является внутренней точкой отрезка, на котором осуществляется аппроксимация экспериментальных данных с границами Rниж, Rверх, определяемыми формулами:
Rниж=R0-n/2·ΔR; Rверх=R0+n/2·ΔR,
где n - число узловых точек.
На этом отрезке в узловых точках, соответствующих совокупности стробов дальности, рассчитывают значения аппроксимирующей функции.
Аппроксимация может осуществляться методом наименьших квадратов (МНК) (Г.Корн и Т.Корн, Справочник по математике для научных работников и инженеров, М.: Наука, 1978 г., с.693), причем в качестве аппроксимирующей функции используют дискриминационную характеристику пеленгатора того типа, к которому относится рассматриваемый угломестный канал моноимпульсной БРЛС:

где
где
G(β) - диаграмма направленности антенны в угломестной плоскости;
Δθ - угол отражения верхнего и нижнего лучей от равносигнального направления;
βРСН - угол, определяющий положение равносигнального направления антенны в угломестной плоскости;
Н - высота носителя БРЛС;
hц - высота цели;
Di - дальность до цели.
В качестве иллюстрации приводится пеленгатор амплитудного типа.
Для решения системы нелинейных уравнений с двумя неизвестными Н (высота носителя) и βРСН (угол наклона антенны):
появляющейся в ходе реализации процедуры МНК, заключающейся в минимизации квадрата ошибки аппроксимации:

может быть использован, например, метод Ньютона (Г.Корн и Т.Корн, Справочник по математике для научных работников и инженеров, "Наука", М., 1978 г., с.661) с начальными приближениями искомых корней Нприб и βРСНнприб, полученных от бортовых датчиков. Другим вариантом решения является итерационный метод Левенберга-Маркардта, применяемый в системе Mathcad (Mathcad 6.0 Plus, изд. 2-е, стереот. - M.: инф. - изд. дом "Филинъ", с.639).
Полученные в результате решения системы уравнений корни h0 и βрсн 0 являются апостериорными оценками высоты носителя  и угла наклона антенны относительно горизонта
и угла наклона антенны относительно горизонта  и используются при расчете оценки дальней границы
и используются при расчете оценки дальней границы  области разрешенной селекции ВЦ/НЦ и для формирования опорной функции для анализатора fоп (i; р). Оценка дальней границы зоны разрешенной селекции определяется с использованием формулы:
области разрешенной селекции ВЦ/НЦ и для формирования опорной функции для анализатора fоп (i; р). Оценка дальней границы зоны разрешенной селекции определяется с использованием формулы:

где  - оценка дальней границы зоны разрешенной селекции;
- оценка дальней границы зоны разрешенной селекции;
 - оценка высоты носителя БРЛС;
- оценка высоты носителя БРЛС;
 - оценка угла, определяющего положение равносигнального направления антенной системы в угломестной плоскости.
- оценка угла, определяющего положение равносигнального направления антенной системы в угломестной плоскости.
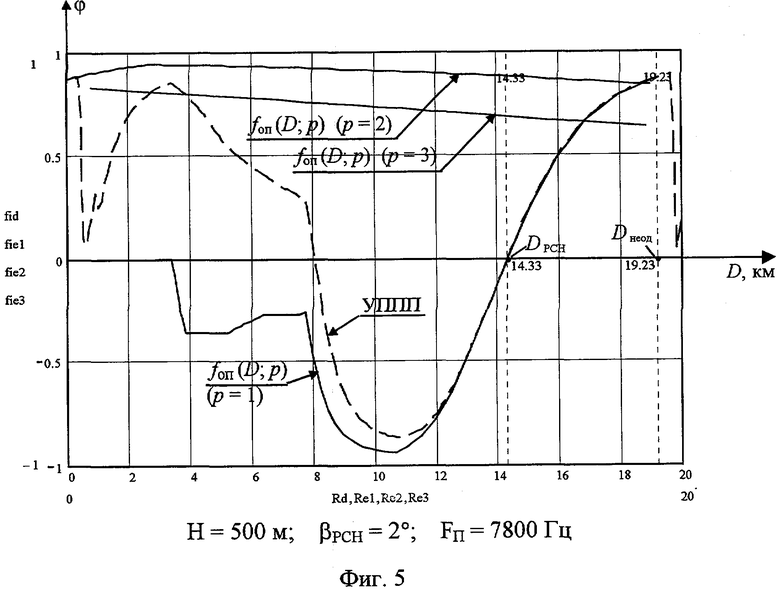
Формирование опорной функции производят с учетом возможной неоднозначности значения по дальности границ области селекции ВЦ/НЦ, т.е. адрес ячейки памяти, в которую записывается значение опорной функции, определяется номером строба дальности, сравнимым по модулю со значением номера элемента дальности на однозначной шкале, и порядком неоднозначности этого элемента. Вид опорной функции представлен на фиг.5.
Заявляемое устройство работает следующим образом. На вход углового дискриминатора 7 с выхода фильтра 3 одного из стробов обнаружителя 1 в суммарном канале моноимпульсной БРЛС и с выхода фильтра 3 того же строба дальности многоканального приемника разностного угломестного канала 6 поступают сигналы. Номер фильтра с сигналом от подстилающей поверхности известен на основании данных обнаружителя. Номера "целевых" фильтров могут быть любые из интервала 1...М, где М - общее число фильтров в стробе дальности. Сигналы углового рассогласования через коммутатор 8 стробов дальности, управляемый признаками наличия цели ППП, которые вырабатываются пороговыми устройствами 4 обнаружителя 1, подаются на анализатор 9 выходных данных угловых дискриминаторов 7. В анализаторе 9 устанавливается факт близости сигнала углового рассогласования значению опорной функции для анализируемого строба дальности.
Необходимые для работы анализатора величины (значения опорной функции, оценка дальности дальней границы зоны селекции, величина интервала однозначного измерения дальности на используемой частоте повторения зондирующих импульсов) поступают из вычислительного устройства, входящего в состав БРЛС (вычислитель ВУ-1-15 и вычислитель ВУ-2-16). Алгоритмы расчетов указанных величин приведены выше. Установленный факт близости сигнала углового рассогласования значению опорной функции в виде логического значения "1" (рассогласование меньше заданного предела) или "0" (рассогласование превышает выбранный предел) используется ЛЭ "И" 10 для выделения только тех результатов анализа, которые одновременно сопровождаются установлением факта обнаружения сигнала подстилающей поверхности ППП и того обстоятельства, что это обнаружение произведено в заданной зоне по дальности ПРС, т.е. что результаты селекции правомерны. ЛЭ "И" 13 формирует на своем выходе признак классификации обнаруженной цели как "Наземная цель" (ПНЦ=1) при наличии на ее входе логического значения "1" с выхода ЛЭ 10 в сочетании с логическим значением "1" с выхода обнаружителя, свидетельствующим о том, что вырабатываемый признак ПНЦ принадлежит обнаруженной цели, а не шумовому выбросу. ЛЭ "И" 12 формирует на своем выходе условный признак классификации обнаруженной цели как "Воздушная цель" (ПВЦ=1) при наличии на ее входе логического значения "1" после инверсии логического значения "0" с выхода ЛЭ 10 в сочетании с логическим значением "1" с выхода обнаружителя, свидетельствующим о том, что вырабатываемый признак ПВЦ принадлежит обнаруженной цели, а не шумовому выбросу. Условный характер формируемому признаку придает то, что он вырабатывается при использовании селекции ВЦ/НЦ с помощью угломестного канала. Если дискриминация ВЦ/НЦ с использованием угломестного канала невозможна, о чем свидетельствует логическое значение "0" хотя бы одного из признаков ППП и ПРС, то ЛЭ "И" 11 формирует на своем выходе условный признак классификации обнаруженной цели как "Воздушная цель" (ПВЦ=1). Результирующий признак классификации обнаруженной цели как воздушная формируется на выходе ЛЭ "ИЛИ" 14.
Входящий в состав заявляемого устройства анализатор 9 выходных данных угломестного канала моноимпульсной БРЛС работает следующим образом. Основной задачей анализатора является определение участка опорной функции (ветви многозначной функции), с которой производится сравнение отсчета угломестной характеристики обнаруженной цели, а также вида меры близости - разность или модуль разности двух сравниваемых величин. Для этого используются номер строба дальности с обнаруженной целью, интервал однозначности при текущем значении частоты повторения импульсов (ЧПИ), порядок неоднозначности при текущей ЧПИ для однозначной дальности до цели, оценка значения дальней границы разрешенной зоны селекции и собственно отсчет угломестной характеристики цели. Сначала компаратор 17 сравнивает значения оценки дальности до дальней границы разрешенной зоны селекции  и интервала однозначности по дальности при текущей ЧПИ Rнеод. При условии
и интервала однозначности по дальности при текущей ЧПИ Rнеод. При условии  компаратор 17 формирует на управляющем входе демультиплексора 18 логическое значение "1", в результате чего отсчет угломестной характеристики цели направляется на вход демультиплексора 19, в противном случае (т.е.
компаратор 17 формирует на управляющем входе демультиплексора 18 логическое значение "1", в результате чего отсчет угломестной характеристики цели направляется на вход демультиплексора 19, в противном случае (т.е.  ) компаратор 17 формирует логическое значение "0", а демультиплексор 18 направляет этот отсчет на один из двух входов мультиплексора 21. В случае
) компаратор 17 формирует логическое значение "0", а демультиплексор 18 направляет этот отсчет на один из двух входов мультиплексора 21. В случае  в зависимости от величины порядка неоднозначности дальности до обнаруженной цели p=1, 2...рмакс, значение которого поступает на второй вход (вывод селекции данных) демультиплексора 19, последний направляет указанный отсчет на один из компараторов 22 (р=2), 23 (р=3) или на второй вход мультиплексора 21 (p=1) и далее на первый вход компаратора 24 и входы коммутаторов 28, 31, 32. На вторые входы компараторов 22, 23, а также компаратора 34 через демультиплексор 20 подается соответствующее значение опорной функции. Направление, по которому демультиплексор 20 направляет значения опорной функции, выбирается в зависимости от величины интервала неоднозначности р, поступающего из вычислительной системы БРЛС на вывод селекции данных (второй вход демультиплексора 20). Компараторы 22, 23 формируют логические значения "1", если разность сравниваемых величин не превосходит заданных значений; компаратор 34 - если модуль разности не превосходит заданного значения. В противном случае компараторы 22, 23, 34 формируют логическое значение "0".
в зависимости от величины порядка неоднозначности дальности до обнаруженной цели p=1, 2...рмакс, значение которого поступает на второй вход (вывод селекции данных) демультиплексора 19, последний направляет указанный отсчет на один из компараторов 22 (р=2), 23 (р=3) или на второй вход мультиплексора 21 (p=1) и далее на первый вход компаратора 24 и входы коммутаторов 28, 31, 32. На вторые входы компараторов 22, 23, а также компаратора 34 через демультиплексор 20 подается соответствующее значение опорной функции. Направление, по которому демультиплексор 20 направляет значения опорной функции, выбирается в зависимости от величины интервала неоднозначности р, поступающего из вычислительной системы БРЛС на вывод селекции данных (второй вход демультиплексора 20). Компараторы 22, 23 формируют логические значения "1", если разность сравниваемых величин не превосходит заданных значений; компаратор 34 - если модуль разности не превосходит заданного значения. В противном случае компараторы 22, 23, 34 формируют логическое значение "0".
Компаратор 24 разделяет положительные и отрицательные значения отсчетов угломестной характеристики цели. В случае положительного отсчета на выходе компаратора 24 формируется логическое значение "1", в противоположном случае - логическое значение "0". Компаратор 25 разделяет положительные и отрицательные значения отсчетов угломестного профиля подстилающей поверхности. В случае положительного отсчета на выходе компаратора 24 формируется логическое значение "1", в противоположном случае - логическое значение "0". Для определения знака анализируемого отсчета на вторые входы компараторов 24 и 25 подается логическое значение "0". Если значения обоих отсчетов, подлежащих сравнению, положительны, то ЛЭ "И" 29 формированием на своем выходе логического значения "1" через коммутатор 32 подключает к одному из входов компаратора 33 отсчет угломестной характеристики цели. На второй вход этого компаратора подается отсчет угломестного профиля подстилающей поверхности. Если модуль разности не превосходит заданного значения, то на выходе компаратора 33 формируется логическое значение "1", в противном случае компаратор 33 формирует логическое значение "0".
В случаях положительного значения отсчета угломестной характеристики цели и отрицательного значения соответствующего отсчета угломестного профиля подстилающей поверхности логическое значение "1" формируется на выходе ЛЭ "И" 26, которое и позволяет коммутатору 28 через двухвходовый ЛЭ "ИЛИ" 27 пропустить на один из двух входов компаратора 30 отсчет угломестной характеристики цели Sц(i, jц). На второй вход компаратора 30 поступает соответствующий отсчет угломестного профиля подстилающей поверхности Sпп(i, jпп). На выходе компаратора 30 формируется логическое значение "1" при условии, что арифметическое значение разности сравниваемых величин не превышает допустимого значения. На первый вход этого же компаратора поступит и отрицательный отсчет угломестной характеристики цели независимо от знака отсчета угломестного профиля подстилающей поверхности, благодаря инвертированию логического значения "0", поступающего с выхода компаратора 24 на один из двух входов ЛЭ "ИЛИ" 27, что обеспечивает наличие логического значения "1" на управляющем входе коммутатора 28 в этом случае.
Логическое значение "1" на выходе компаратора 30 указывает, что обнаруженная отметка цели обусловлена наземным объектом. В противном случае проводится дополнительная проверка отсчета угломестной характеристики цели путем сравнения его с соответствующим отсчетом опорной функции в компараторе 34. Для этого отсчет угломестной характеристики цели через коммутатор 31 подается на один вход компаратора 34, на другой вход этого компаратора через демультиплексор 20 поступает соответствующее значение опорной функции. Коммутатор 31 управляется инвертированным сигналом с выхода компаратора 30. Компаратор 34 формирует на своем выходе логическое значение "1", если модуль разности сравниваемых величин не превосходит допустимого значения. Выходы компараторов 22, 23, 30, 33, 34 объединяются многовходовым ЛЭ "ИЛИ".
Для выполнения заявляемого устройства могут быть использованы, например, отечественные микросхемы на МОП-транзисторах серий К156, К561, К566 и т.п.или зарубежные аналоги: микросхемы серий 4000, МАХ300 и др., а также микропроцессорные наборы подходящих серий.
Использование изобретения позволит повысить эффективность различения маловысотных малоскоростных воздушных и движущихся наземных целей при их обнаружении с помощью когерентных моноимпульсных БРЛС. При этом под эффективностью понимается расширение тактических условий (высота полета носителя БРЛС, угол наклона антенны, значение используемой частоты повторения зондирующих импульсов). Кроме того, благодаря сужению режектируемой спектральной зоны в области расположения пика отражений от подстилающей поверхности по главному лучу диаграммы направленности антенны, можно рассчитывать на уменьшение числа используемых в процедуре обзора частот повторения импульсов и, как следствие, на некоторое увеличение дальности обнаружения БРЛС на фоне подстилающей поверхности.
Изобретение относится к радиолокационной технике и, в частности, к бортовым РЛС летательных аппаратов (истребителей, вертолетов) и предназначено для обеспечения эффективного различения обнаруженных маловысотных малоскоростных воздушных целей и движущихся наземных целей. Технический результат заключается в повышении эффективности различения маловысотных малоскоростных воздушных и движущихся наземных целей, а также уменьшении числа используемых в процедуре обзора частот повторения импульсов. Технический результат достигается тем, что в известное устройство, содержащее многоканальный обнаружитель когерентного импульсного сигнала в суммарном канале моноимпульсной БРЛС, каждый канал которого включает совокупность узкополосных ("доплеровских") фильтров и пороговых устройств в каждом частотном канале; многоканальный приемник угломестного канала моноимпульсной БРЛС с совокупностью доплеровских фильтров для каждого строба дальности; многоканальное устройство формирования сигнала угловой ошибки, коммутатор каналов дальности, компаратор, логический элемент (ЛЭ) "ИЛИ" и четыре ЛЭ "И", дополнительно введены семь двухвходовых компараторов, три демультиплексора, один двухканальный мультиплексор, три коммутатора сигнала, два ЛЭ "И", два ЛЭ "ИЛИ" и вычислитель опорной функции. 1 з.п. ф-лы, 7 ил.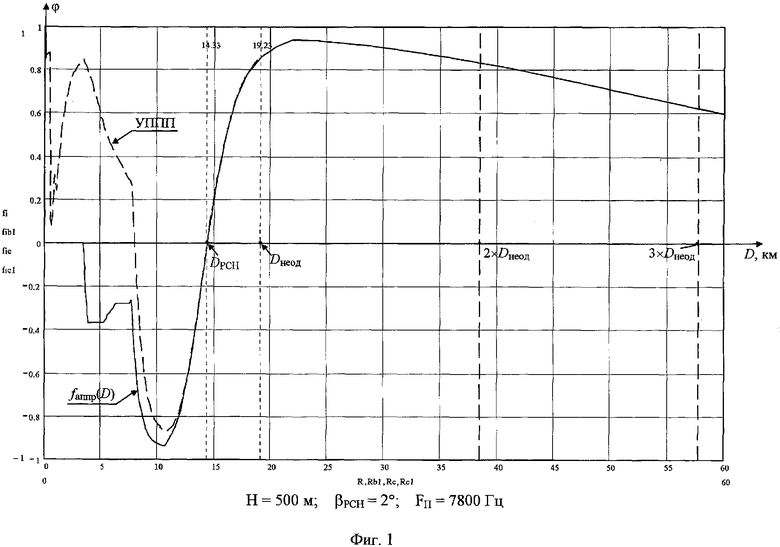
| US 4862177, 29.08.1989 | |||
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ДОПЛЕРОВСКОЙ ЧАСТОТЫ | 1990 |
|
RU2231085C2 |
| JP 2000214251, 04.08.2000. | |||

