Изобретение относится к области неразрушающего контроля, в частности к устройствам для внутритрубной диагностики состояния стенок труб нефте-, газо-, продуктопроводов и может быть использовано для контроля сплошности металла стенок труб действующих нефте-, газопродуктопроводов.
Известен «Магнитометр дефектоскопический» (Патент РФ №2193190, приоритет от 31.07.2000 г., авт. Бакунов А.С. и др.), содержащий последовательно соединенные источник тока, преобразователь Холла и усилитель, а также последовательно соединенные аналого-цифровой преобразователь, микропроцессорный блок и графический дисплей. Усилитель имеет вход управления, соединенный с микропроцессорным блоком, вход аналого-цифрового преобразователя, подключенный к выходу усилителя. Известный «Магнитометр дефектоскопический» может быть применен для получения диагностической информации на внутритрубном снаряде-дефектоскопе. Дефектоскоп должен зарегистрировать поле, соответствующее фактической толщине стенки трубы (фоновое поле), и поле, вызванное локальными изменениями толщины (поле дефекта). При этом необходимо регистрировать сигналы постоянного тока с их локальными изменениями.
Недостатком известного устройства является наличие недопустимого изменения положения рабочей точки усилителей постоянного тока, наблюдаемых при переходе от обнаружения дефектов на толстостенной трубе к диагностике тонкостенной трубы. Особенно резкие изменения положения рабочей точки наблюдаются при переходе к тонкостенной трубе в случае настройки аппарата на выявление и измерение неглубоких (до 10-15%) дефектов в толстой стенке, где рассеиваемое около трубы фоновое поле невелико.
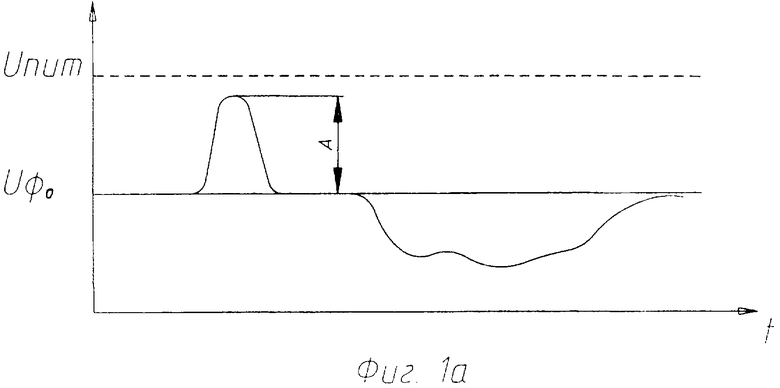
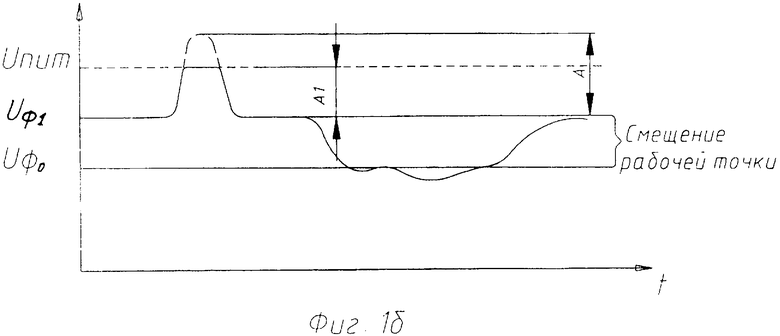
Для толстостенной трубы требуется высокий коэффициент усиления усилителей, а рабочая точка устанавливается посередине допустимого диапазона изменения напряжений выходного сигнала (фиг.1а). На чертеже положительные импульсы соответствуют обнаруженным локальным дефектам утонения стенки трубы. При переходе на тонкостенную трубу магнитное поле, рассеиваемое около стенки трубы, резко возрастает и рабочая точка преобразователя поля смещается к напряжению, близкому к величине напряжения питания. Иными словами, возможный линейный участок рабочих напряжений сужается. При значительной разнице в толщине стенок обследуемых труб, положение рабочей точки может оказаться таким, что усилители будут выходить на полку уже при неглубоких дефектах, не превышающих и половины предельного размера дефекта, подлежащего регистрации без искажений (фиг.1в). Если дефектоскоп применяется для наружного обследования трубопровода с участием человека, то всегда в нужный момент можно произвести перенастройку аппаратуры вручную. Если же магнитометр используется в составе автономного внутритрубного дефектоскопа, двигающегося в течение нескольких часов в полости трубопровода без какой-либо информационной связи с человеком, то возникают условия искажения или потери достоверной информации. Обеспечение полноты данных, необходимых для анализа технического состояния стенки трубопровода, оказывается возможным только проведением повторных пусков дефектоскопа с различными настройками его регистрирующей аппаратуры, а это увеличивает стоимость диагностических данных.
Наиболее близким по существу является: "Устройство для магнитного контроля» (Патент РФ №2095804, приоритет от 11.10.1997 г., авт. Шелихов Г.С. и др.), содержащее намагничивающее устройство, датчики магнитного поля с основным и дополнительным усилителями, блок определения поля дефектов, блок суммирования поля фона с полями дефектов, блок сравнения, блок накопления и обработки информации. Известное устройство позволяет выявлять и регистрировать дефекты растрескивания, потери металла и может быть использовано в составе автономного магнитного дефектоскопа для внутритрубного контроля состояния стенок труб газопроводов.
Недостатком известного устройства является изменение настройки преобразователей магнитного поля при изменении величины фонового поля, рассеиваемого около стенки трубы (обследуемой детали), что приводит к смещению положения уровня фонового поля в интервале, отведенном для регистрации изменений поля цифрового регистратора дефектоскопа и к сужению неискажаемого диапазона регистрируемых сигналов. Смещение положения рабочей точки, соответствующей уровню фонового поля, особенно негативно сказывается при использовании устройства в составе автономного внутритрубного дефектоскопа, регистрирующего изменения поля, рассеиваемого около внутренней стенки трубы. Учитывая наличие в трубопроводе труб с изменением толщины стенки, доходящим до 40% от предполагавшегося при настройке аппаратуры и при необходимости регистрировать дефекты с относительной глубиной от единиц до 30% от толщины стенки трубы, можно отметить, что жесткая предварительная настройка диагностической аппаратуры не может гарантировать неискаженной регистрации одновременно фонового поля и полей рассеяния дефектов оговоренного размера, что ухудшает эксплуатационные характеристики дефектоскопа.
В магнитном дефектоскопе стенка обследуемой трубы намагничивается постоянными магнитами магнитной системы, формирующей магнитный поток постоянной величины. Индукция в стенке зависит как от магнитного потока намагничивающего устройства, так и от сечения стенки трубы:
В=Ф/ST,
где В - магнитная индукция,
Ф - магнитный поток намагничивающей системы,
ST - сечение стенки трубы в направлении, перпендикулярном направлению намагничивающего поля.
На конкретном дефектоскопе с намагничиванием от постоянных магнитов, магнитный поток можно считать величиной постоянной.
При увеличении толщины стенки трубы и при постоянстве потока от намагничивающего устройства индукция в стенке будет убывать. При уменьшении толщины стенки трубы индукция поля в стенке трубы будет возрастать. Из законов электротехники (Л.А.Бессонов: Теоретические основы электротехники «Электромагнитное поле», М.: Высшая школа, 1978 г., 231 с.) известно, что тангенциальная составляющая напряженности магнитного поля в ферромагнитной пластине будет совпадать с тангенциальной составляющей напряженности магнитного поля около стенки пластины, намагничиваемой внешним полем. Измеряя тангенциальную составляющую поля около пластины, можно оценить напряженность магнитного поля в теле пластины.
Если пластина будет иметь утонение в какой-то ее части, то сечение в этой части будет уменьшаться. Приняв ширину пластины неизменной, найдем, что индукция в теле пластины в направлении, перпендикулярном направлению магнитного поля, будет обратно пропорциональна толщине пластины в рассматриваемом месте, т.е.:
Вτ=Нτμμ0=Ф/(W t),
где W - ширина пластины,
t - толщина пластины,
μ и μ0 - соответственно относительная магнитная проницаемость материала и абсолютная магнитная проницаемость вакуума.
Для двух частей пластины с одинаковой шириной, но с разной толщиной, полагая одинаковость магнитной проницаемости внутри металла и, опустив индекс τ, можно записать:
B1=Ф/(Wt1),
B2=Ф/(Wt2).
Если разделить B1 на B2, то получим:
То есть отношение тангенциальных составляющих индукции магнитного поля в дефектном (с утоненной стенкой) и бездефектном местах пропорционально отношению толщин стенки изделия в бездефектном и дефектном месте.
Как видно из этих выражений, изменение толщины пластины приведет к увеличению фонового поля. Локальное изменение толщины приведет к локальному изменению напряженности магнитного поля.
Цель изобретения - улучшение эксплуатационных характеристик.
Указанная цель достигается тем, что в известное устройство, состоящее из множества датчиков магнитного поля, множества основных усилителей, блока определения поля фона, блока суммирования поля фона с полями дефектов, блока сравнения введены: задатчик уровня фонового сигнала, первый и второй операционные усилители, первый и второй потенциометры, управляющий усилитель и многоканальный аналого-цифровой преобразователь (АЦП), причем датчики поля выполнены в виде датчиков Холла, блок определения поля фона выполнен в виде многовходового суммирующего усилителя, блок сравнения выполнен в виде операционного усилителя, блок суммирования поля фона с полями дефектов выполнен в виде множества по числу датчиков операционных усилителей при этом, сигнальные выходы датчиков Холла подключены к соответствующим входам соответствующих основных усилителей, а первые выводы питания датчиков Холла соединены с первым аналоговым входом многоканального АЦП и с выходом управляющего усилителя, вход которого подключен к выходу первого разностного усилителя, к первому входу которого подключен ползунок первого потенциометра, а ко второму входу первого разностного усилителя подключен выход многовходового суммирующего усилителя, каждый из множества входов которого подключен к выходу соответствующего основного усилителя, при этом выход каждого из основных усилителей соединен с первым входом соответствующего усилителя блока суммирования поля фона с полями дефектов, второй вход каждого усилителя блока суммирования поля фона с полями дефектов соединен с выходом суммирующего усилителя, а выход каждого усилителя блока суммирования поля фона с полями дефектов соединен с соответствующим аналоговым входом многоканального аналого-цифрового преобразователя, а третьи входы всех усилителей соединены с ползунком второго потенциометра, первый вывод которого соединен с первым выводом первого потенциометра и соединен с положительным полюсом источника питания, а второй вывод второго потенциометра соединен со вторым выводом первого потенциометра и соединен с общим проводом устройства.
Рассматриваемый «Преобразователь магнитного поля» вызван практической необходимостью обеспечения диагностики технического состояния стенок газопроводов, которые, с увеличением срока их службы под влиянием переменных механических напряжений, вызванных колебанием давления транспортируемого продукта и сезонными колебаниями температуры, начинают проявлять тенденцию к появлению растрескивания под напряжением и к возникновению наружной коррозии под влиянием агрессивных факторов окружающей среды. На магистральных газопроводах стенки труб имеют различную толщину, в зависимости от величины давления транспортируемого газа и в зависимости от близости трубопровода к населенным пунктам. Так вблизи к компрессорной станции находится охранная зона, где толщина стенки труб увеличена против основной магистрали.
Если дефектоскоп настроен на выявление мелких дефектов на толстостенной трубе, то чувствительность датчиков должна быть установлена высокой. При этом рабочая точка датчиков Холла в поле, рассеиваемом около стенки трубы, выбирается предварительно так, чтобы выходной сигнал после основного усилителя соответствовал половине напряжения питания. Если дефектоскоп переходит на трубу с тонкой стенкой, то по причине высокой чувствительности датчиков Холла сигнал на их выходе возрастает на бездефектном участке (фоновый сигнал) и рабочая точка смещается в сторону значений напряжения питания. Возрастание магнитного поля около дефектов в стенке тонкой трубы приводит к тому, что сигнал на выходе усилителя ограничивается напряжением питания и истинное значение глубины обнаруженного дефекта не может быть восстановлено по такому ограниченному сигналу. Это ограничивает диапазон выявляемых дефектоскопом дефектов при работе на трубах с разными толщинами стенок. Если настройка дефектоскопа проведена на работу с тонкой стенкой трубы, то чувствительность датчиков Холла устанавливается низкой и при переходе на толстостенную трубу сигналы от неглубоких дефектов оказываются малой амплитуды и соизмеримы с шумами, что исключает достоверное обнаружение малых дефектов в толстой стенке. По этой причине, если известна толщина стенок контролируемых труб, требуется предварительная настройка диагностической аппаратуры для получения оптимальной чувствительности, обеспечивающей на конкретной трубе выявление дефектов минимального требуемого размера. Однако, как указывалось, на трубопроводе отдельные его участки могут иметь разную толщину стенки и предварительная настройка на одну толщину стенки оказывается неоптимальной при работе на трубе с другой толщиной стенки.
Автоматическая подстройка датчиков для стабилизации положения рабочей точки и обеспечения одинаковой чувствительности при контроле глубины поражения стенки трубы, способствует повышению производительности контроля трубопровода и устраняет субъективные оценки размеров дефектов, обнаруживаемых на стенках труб. Этим исключается необходимость нескольких пусков дефектоскопа по одному и тому же участку трубопровода, но с разными настройками аппаратуры. Это является подтверждением того, что предлагаемое устройство промышленно применимо.
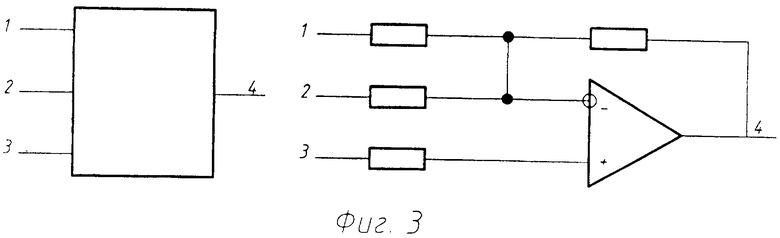
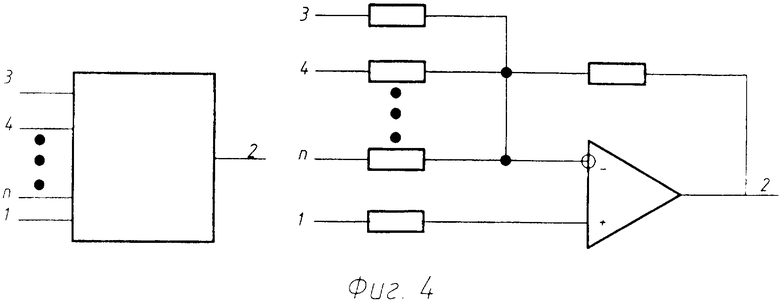
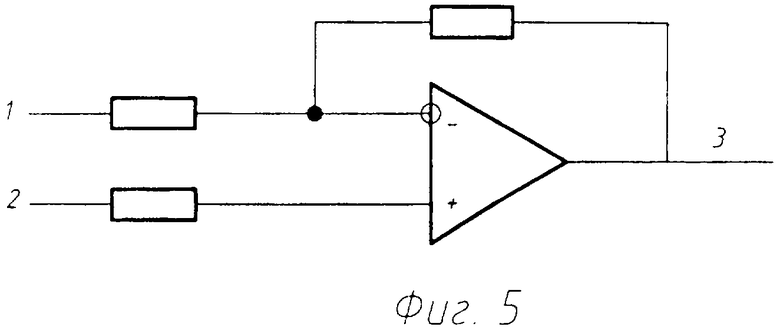
Изобретение поясняется чертежами: На фиг.2 показана функциональная схема устройства. На фиг.3 показаны принципиальные схемы усилителей определения поля дефектов 5 и операционного усилителя сравнения 6. На фиг.4 показана принципиальная схема усилителя формирования поля фона 4. На фиг.5 показана принципиальная схема основного усилителя 3 и управляющего усилителя 8.
На фиг.2 представлены: намагничивающая система 1, множество датчиков магнитного поля 2 (датчиков Холла), основные усилители (по числу равному числу датчиков Холла) 3, операционный усилитель формирования поля фона 4, множество (по числу датчиков Холла), операционные усилители определения поля дефектов 5, операционный усилитель сравнения 6, потенциометр - задатчик уровня сигнала фона 7, потенциометр - задатчик уровня нуля 10, управляющий усилитель 8, аналого-цифровой преобразователь 9, стенка контролируемой трубы 11.
Намагничивающая система 1 относится к элементам конструкции дефектоскопа. Она может быть выполнена с использованием постоянных магнитов, укрепленных на магнитопроводе со стальными щетками в качестве полюсных наконечников или без щеток. В межполюсном пространстве размещается сенсорный контейнер с установленными в один ряд, в виде линейки, датчиками Холла 2 в количестве, обеспечивающем требуемую разрешающую способность измерений. Оси чувствительности датчиков Холла ориентированы вдоль направления магнитного поля. Выходы 1 и 2 датчиков Холла 2 подключаются к соответствующим 1 и 2 входам усилителей 3 (блока основных усилителей). Вывод питания 4 датчиков Холла соединен с общим проводом источника питания. Выход 3 каждого k-го усилителя 3 подключен к соответствующему k-му входу суммирующего усилителя 4 (блока формирования поля фона). Выход 1 суммирующего усилителя 4 подключен ко входу 2 каждого из усилителей 5 определения поля дефекта. Этот же выход 1 суммирующего усилителя 4 соединен со входом 2 операционного усилителя сравнения 6. Ко входу 1 операционного усилителя сравнения 6 подключен ползунок потенциометра 7 - задатчика уровня сигнала фона. Выход 4 операционного усилителя 6 соединен со входом 1 управляющего усилителя 8. Выход 3 управляющего усилителя 8 соединен выводом 3 питания всех датчиков Холла 2. Выходы 4 усилителей определения поля дефекта 5 подключены к соответствующим (со 2-го по n-й) аналоговым входам АЦП 9. К первому входу АЦП 9 подключен выход 3 управляющего усилителя 8. Выходная и управляющая шины АЦП 9 подключаются к бортовому регистратору (не показан) снаряда дефектоскопа.
Работает устройство следующим образом.
Из курса физики известно: (Путилов К.А. Курс физики, том 2: Учение об электричестве. Изд. ФМЛ., М., 1962, с.583 ), что сигнал Ux на выходе датчика Холла зависит от свойств материала датчика kx, протекающего по датчику току I, и от индукции В действующего на датчик магнитного поля:
Ux=kxIB
Передаточная характеристика датчика Холла линейная, то есть выходное напряжение датчика линейно зависит от индукции магнитного поля и линейно зависит от питающего тока. Это означает, что, изменяя величину тока, протекающего по датчику Холла, можно изменять его чувствительность:
S=Ux/B=kx I
Если учесть, что ток в датчике Холла определяется приложенным к нему напряжением Е и его внутренним сопротивлением R, которое при определенных условиях может быть принято за постоянную величину для данного типа датчиков, то чувствительность датчика можно выразить так:
S=Ux/B=kxI=kxE/R
Для датчика Холла типа THS126 производства фирмы Toshiba экспериментально снята зависимость его чувствительности (крутизны преобразования) от питающего напряжения. Зависимость крутизны преобразования датчика от питающего напряжения приведена в таблице:
Магнитная диагностика стенок труб основана на использовании эффекта изменения величины напряженности магнитного поля, рассеиваемого около стенки намагниченной трубы в местах, где наблюдается изменение толщины стенки трубы.
Если толщина стенки трубы t - абсолютная глубина дефекта Δt, то относительная глубина дефекта будет:
δ=Δt/t.
Сигнал, формируемый датчиком Холла на участке трубы с толщиной стенки t, не имеющем изменения толщины (фоновый сигнал UФ), описывается выражением:
Uф=SBф,
где Вф - индукция фонового поля.
На участке, имеющем изменение толщины Δt, будет наблюдаться увеличение индукции рассеиваемого около стенки магнитного поля до величины: В=Вф(1+δ).
Обычно дефекты охватывают небольшую часть стенки трубы. Если вся стенка трубы контролируется множеством датчиков, то на дефектном участке оказываются не более 10% датчиков. Например, для трубы диаметром 1220 мм, длина дуги окружности равна 3360 мм. Дефектами коррозионного типа поражается донная часть шириной 100-250 мм.
Это 1/30÷1/20 часть окружности трубы. Если встречаются трещины, то зона растрескивания еще уже. Ее ширина редко превышает 50 мм. Учитывая сказанное, можно с допустимой для оценки опасности коррозии погрешностью формировать значение сигнала, соответствующего фоновому полю у стенки трубы, как среднее значение по сумме сигналов от всех датчиков:
 ,
,
где Sx - чувствительность датчика Холла;
Bi - значение индукции поля в зоне работы i-го датчика Холла.
Если дефект обнаружен одним датчиком из двадцати, то его сигнал войдет в усредненное значение UΣ убавленным в 20 раз и исказит напряжение фонового поля всего на 5%, что допустимо для оценки размеров дефекта с целью определения степени его опасности. Если процесс дефектоскопии ведется на скорости от 1 до 3 м/с, то применением низкочастотного фильтра к усредняемому напряжению, ошибку можно снизить до долей процента. Для оценки глубины дефекта необходимо знать приращение сигнала датчика ΔUi на дефектном месте относительно фонового значения UΣ. Приращение сигнала или выявление поля дефекта находится вычитанием среднего значения, соответствующего фоновому полю из сигнала Ui каждого конкретного датчика:
Δui=Ui-UΣ
Запоминая значения ΔUi и UΣ и зная влияние формы дефекта на величину рассеяния поля (далее это учитывается коэффициентом kш), мы получаем возможность вычислить относительную глубину утонения стенки трубы в зоне каждого датчика и восстановить картину поражения стенки трубы:
Δ=Δt/t=kшΔВ/(Вф+ΔВ)=kш(ΔUi)/(UΣ+ΔUi)=kш(Ui-UΣ)/Ui
При работе дефектоскопа на реальной трассе газопровода стоит задача выявить дефекты различной глубины. При этом, если трубопровод введен в эксплуатацию несколько лет назад, то глубокая коррозия на его стенках развиться не успела, и следует ожидать регистрации дефектов малой глубины (до 5-10%). В этом случае чувствительность датчиков I должна быть достаточно высокой. На трубопроводе отдельные его участки имеют различную толщину стенки трубы: например, для трубы диаметром 1220 мм в охранной зоне стенка может иметь толщину 16-18 мм, в рабочей зоне 9-12 мм. При этом встает проблема выбора чувствительности датчиков. На толстостенной трубе напряженность фонового поля на 40% будет слабее, чем на тонкостенной.
Соответственно, размах сигнала от дефектов одинаковой глубины на толстостенной трубе будет на 40% меньше, чем на тонкостенной.
Рассмотрим пример.
Пусть предельное верхнее значение напряжения сигнала ограничено величиной 4 В. При отсутствии поля рабочую точку усилителя сигнала выберем на уровне 0,5 В, фоновое поле на толстостенной трубе будем считать равным 8 мТл. На тонкостенной трубе фоновое поле будем считать равным 12 мТл. Положим предельную величину регистрируемого дефекта равной 80% от толщины стенки трубы. Из практики известно, что для 80% глубины дефекта приращение поля в зоне дефекта может достигать величины фонового значения поля. В этом случае на тонкостенной трубе абсолютное значение поля в зоне 80% дефекта будет достигать значения Вф+ΔВ=12+12=24 мТл. Положим, что этому значению будет соответствовать выходной сигнал основного усилителя амплитудой 4 В. В этом случае требуемый коэффициент преобразования датчика Холла с усилением будет Si=(4000 мВ - 500 мВ)/2 мТл = 146 мВ/мТл Выберем усиление основного усилителя равным 100. Чувствительность датчика Холла должна быть при этом установлена равной 1,46 мВ/мТл. Это может быть обеспечено подачей напряжения питания датчика равным 2,3 В (см. Табл.1).
При выбранном режиме работы усиленный фоновый сигнал на тонкостенной трубе будет обеспечивать на выходе основного усилителя напряжение U=0,5+SiВф=0,5+1,46 в/мТл·12 мТл = 0,5+1,75=2,25 В. Допустимый размах сигнала от рабочей точки до начала нелинейной части характеристики 1,75 В. При всей шкале измерения 80% на 1% глубины дефекта будет приходиться 21 мВ. Это превышает 16 мВ - вес младшего разряда восьмиразрядного АЦП. При переходе на трубу со стенкой 16 мм на 1% изменения толщины стенки будет приходиться сигнал 15-16 мВ. При использовании 8-разрядного АЦП с опорным напряжением 4 В, это значение уже соответствует цене младшего разряда преобразования, и четкость срабатывания АЦП пропадает. Для восстановления чувствительности устройства на прежнем уровне необходимо повысить чувствительность сенсоров пропорционально ослаблению поля рассеяния на толстостенной трубе. Следовательно, при переходе на толстостенную трубу нужно довести чувствительность сенсора от 1, 46 мВ/мТл до величины 1,95 мВ/мТл. Для этого нужно увеличить напряжение питания датчика Холла от 2,3 до 3,07 В, то есть пропорционально увеличению толщины стенки трубы. Сигнал от фонового поля 8 мТл будет иметь значение Uф=8·1,95=1,56 В. При повышенной чувствительности датчиков Холла за счет возрастания напряжения их питания сохраняется величина приращения сигнала на 1 % изменения глубины дефекта.
Работа устройства при обследовании трубы происходит следующим образом:
Магнитная поисковая система и преобразователь магнитного поля размещаются на наружной поверхности внутритрубного снаряда-дефектоскопа. Электронная аппаратура, регистраторы и источники электропитания размещаются в герметичном контейнере дефектоскопа. Преобразователь магнитного поля укрепляется в межполюсном пространстве магнитной системы так, чтобы сенсоры располагались максимально близко к внутренней поверхности стенки трубы и оси чувствительности сенсоров совпадали с направлением намагничивающего поля. Дефектоскоп перемещается в трубе под давлением транспортируемого продукта. В процессе движения дефектоскопа магнитная система 1 намагничивает стенку трубы 11. Магнитное поле «вытекает» из стенки трубы 11 и рассеивается около нее. Это фоновое магнитное поле. Датчики Холла 2 преобразуют магнитную индукцию поля рассеяния в электрический сигнал. Сигналы с выходов 1 и 2 датчиков Холла 2 поступают на входы 1 и 2 соответствующих основных усилителей 3, где происходит усиление сигналов датчиков Холла 2 до требуемых рабочих значений. Усиленные сигналы с выходов 3 каждого из усилителей блока основных усилителей 3 поступают на соответствующие входы 3...n суммирующего усилителя 4 блока определения поля фона. Масштабирующие резисторы усилителя 4 (фиг.5) задают необходимый для каждого датчикового канала коэффициент передачи 1/n, что обеспечит получение суммарного сигнала UΣ в нужном масштабе. Сигнал, соответствующий полю фона, с выхода 1 суммирующего усилителя 4 блока определения поля фона поступает на вход 2 усилителя схемы сравнения 6, и на входы 2 соответствующего каждому датчиковому каналу усилителя 5 блока определения поля дефекта. На вход 1 усилителей 5 блока определения поля дефекта поступают сигналы с выходов 3 соответствующих усилителей 3 блока основных усилителей. Сформированные разности с выходов 4 усилителей 5 блока определения поля дефекта поступают на аналоговые входы 2...n многоканального аналого-цифрового преобразователя 9. Так как поле на входе каждого из датчиков Холла 2 имеет фоновое значение, то, как на выходе 3 каждого основного усилителя 3, так и на выходе 1 усилителя блока определения поля фона 4 будут одинаковые сигналы. На выходе 4 усилителей 5 блока определения поля дефекта будут формироваться разностные сигналы с нулевым значением напряжения. На вход 1 усилителя 6 блока сравнения подается задающий сигнал с движка потенциометра - задатчика 7. Сигналы с потенциометра - задатчика 7 и с выхода 1 усилителя 4 блока определения поля фона вычитаются. Разностный сигнал с выхода 4 усилителя 6 блока сравнения поступает на вход 1 управляющего усилителя 8. Управляющий усилитель с требуемым коэффициентом усиления усиливает разностный сигнал до уровня напряжения, необходимого для обеспечения питания датчиков Холла. Требуемое начальное смещение рабочей точки управляющего усилителя 8 обеспечивается схемным путем. Начальное напряжение устанавливается подачей на вход 3 усилителя 6 и на вход 2 управляющего усилителя напряжения с движка потенциометра - задатчика уровня нуля 10. При прохождении магнитной поисковой системы в зоне наличия дефектов на стенке трубы наблюдаются локальные изменения поля, рассеиваемого около стенки трубы. Датчики Холла 2, проходящие возле изменившихся полей, изменяют напряжения на своих выходах. Остальные датчики Холла сохраняют свои выходные сигналы на неизменном уровне. С учетом наличия низкочастотной фильтрации сигналов в блоке определения поля фона 4 за время прохождения группы датчиков по дефектной зоне на трубе сигнал на выходе 1 блока определения поля фона 4 измениться не успевает и на входе 2, усилителей блока определения поля дефекта 5, действует неизменный по величине сигнал, соответствующий значению фонового поля. Усиленные сигналы датчиков Холла 2 с выхода 3 усилителей блока основных усилителей 3 поступают на входы 1 блока определения поля дефектов 5. На выходах 4 усилителей 5 блока определения поля дефекта, работающих с датчиками, находящимися в зоне дефектов, появляются усиленные разностные сигналы, соответствующие по длительности и амплитуде размерам дефекта, обнаруживаемого датчиком. На выходах усилителей 5, работающих с датчиками, проходящими по бездефектным местам, сохраняется напряжение, соответствующее искусственному «нулю», значение которого задается на входы 3 всех усилителей 5 с движка потенциометра - задатчика уровня нуля 10. Сигнал поля дефекта, поступающий на соответствующий вход (2...n) АЦП 9 кодируется и по интерфейсу передается из АЦП 9 в регистрирующую аппаратуру дефектоскопа (не показаны).
Если происходит увеличение толщины стенки трубы, то уменьшается значение индукции фонового поля. При этом убывают напряжения сигналов на выходах датчиков Холла 2 и убывают напряжения на выходах 3 блока основных усилителей 3. При этом убывает напряжение суммарного сигнала на выходе 1 блока определения поля фона 4. На блоке сравнения 6 происходит убывание напряжения на сравнивающем входе относительно заданного напряжения с выхода задатчика 7 и увеличившаяся разность напряжений с выхода 4 усилителя 6 блока сравнения поступает на вход 1 управляющего усилителя 8. Усиленный по мощности сигнал с выхода 3 управляющего усилителя 8 подается на выводы 3 питания датчиков Холла 2 и на вход 1 АЦП 9. АЦП кодирует новое значение напряжения питания датчиков, увеличившееся по сравнению со значением, присутствовавшим при работе на тонкой стенке. Уменьшение индукции фонового поля у стенки трубы приводит к увеличению напряжения питания датчиков Холла 2 и, следовательно, к увеличению их чувствительности. Увеличение чувствительности датчиков Холла способствует увеличению сигнала на выходе датчика Холла и, следовательно, к увеличению напряжения на выходе 1 усилителя 4 сигнала фонового поля. На входы 2 усилителей 5 поступает с выхода 1 усилителя 4 усредненное напряжение, равное напряжениям, поступающим с выходов 3 основных усилителей сигналов датчиков. На выходах усилителей 5 при переходе на более толстостенную трубу продолжают присутствовать напряжения, равные искусственному «нулю». Переход на трубу с более толстой стенкой будет зарегистрирован только по изменившемуся напряжению питания датчиков Холла, которое поступает на 1 вход АЦП. Система регулирования статическая, поэтому всегда присутствует статическая ошибка, обратно пропорциональная петлевому усилению системы. Для задания начального напряжения питания датчиков Холла используется потенциометр 10 - задатчик уровня искусственного «нуля». Напряжение с движка потенциометра 10 поступает на входы 3 усилителей 4 и 5 и на входы 2 усилителей 6 и 8. Эти входы определяют положение искусственного нуля (потенциала общего сигнального провода) названных усилителей. Установленный потенциал общего сигнального усилителей. Установленный потенциал общего сигнального провода обеспечивает наличие разности потенциалов на выходе 3 управляющего усилителя 8 относительно общего провода источника питающего напряжения, с которым соединен общий провод всех датчиков Холла 2. По этой причине при отсутствии магнитного поля на выходе усилителя 8 присутствует напряжение, равное сумме потенциала общего сигнального провода и опорного напряжения, поступающего с движка потенциометра 7 - задатчика на вход 2 усилителя сравнения 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНОГО КОНТРОЛЯ | 1996 |
|
RU2095804C1 |
| ВНУТРИТРУБНЫЙ МАГНИТНЫЙ ДЕФЕКТОСКОП | 2000 |
|
RU2176082C1 |
| УСТРОЙСТВО ДЛЯ НАМАГНИЧИВАНИЯ СТЕНОК ТРУБ ДЕЙСТВУЮЩИХ ТРУБОПРОВОДОВ | 2006 |
|
RU2304279C1 |
| КОМПЛЕКС ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ С ТРОСОВОЙ ПРОТЯЖКОЙ | 2015 |
|
RU2586258C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕТАЛЛИЧЕСКИХ ТРУБОПРОВОДОВ | 2021 |
|
RU2763963C1 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257571C1 |
| Устройство для магнитометрической диагностики наземных трубопроводов и емкостей без удаления изоляционного покрытия | 2020 |
|
RU2736143C1 |
Изобретение относится к области неразрушающего контроля, в частности к устройствам для внутритрубной диагностики. Преобразователь магнитного поля, состоящий из намагничивающего устройства, датчиков магнитного поля, основных усилителей, блока определения поля фона, блока суммирования поля фона с полями дефектов, блока сравнения, блока накопления и обработки информации, задатчика уровня фонового сигнала, первого и второго операционных усилителей, первого и второго потенциометров, управляющего усилителя и аналого-цифрового преобразователя, обеспечивает неизменную чувствительность магнитной поисковой системы и неизменной ширины диапазон глубин дефектов, регистрируемых внутритрубным магнитным дефектоскопом при дефектоскопии трубопроводов с изменяющейся на разных участках толщиной стенки трубы. При этом регистрируются как изменения сигналов отдельных датчиков относительно фонового значения поля около стенки трубы, так и сигнал, пропорциональный среднему значению толщины стенки трубы. Это обеспечивает оптимальное использование диапазона изменения напряжения регистрируемых сигналов, позволяя использовать половину величины напряжения питания для отведенного диапазона изменения глубины дефектов. Улучшенные эксплуатационные характеристики позволяют собрать более полную информацию о состоянии стенки трубы, избегая дополнительных запусков дефектоскопа в трубопровод. 1 табл., 5 ил.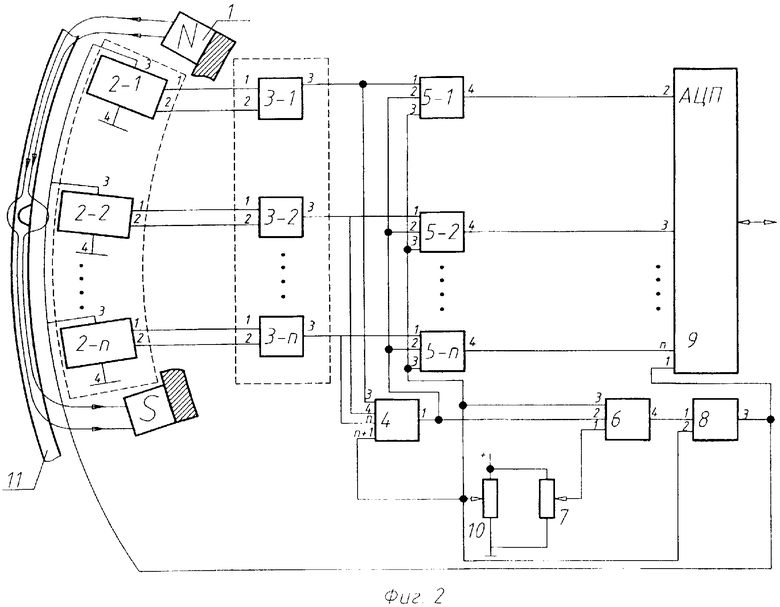
Преобразователь магнитного поля, состоящий из множества датчиков магнитного поля, множества основных усилителей, блока определения поля фона, блока суммирования поля фона с полями дефектов, блока сравнения, отличающийся тем, что в него введены задатчик уровня фонового сигнала, первый и второй операционные усилители, первый и второй потенциометры, управляющий усилитель и многоканальный аналого-цифровой преобразователь (АЦП), причем датчики поля выполнены в виде датчиков Холла, блок определения поля фона выполнен в виде многовходового суммирующего усилителя, блок сравнения выполнен в виде операционного усилителя, блок суммирования поля фона с полями дефектов выполнен в виде множества по числу датчиков операционных усилителей, при этом сигнальные выходы датчиков Холла подключены к соответствующим входам соответствующих основных усилителей, а первые выводы питания датчиков Холла соединены с первым аналоговым входом многоканального АЦП и с выходом управляющего усилителя, вход которого подключен к выходу первого разностного усилителя, к первому входу которого подключен ползунок первого потенциометра, а ко второму входу первого разностного усилителя подключен выход многовходового суммирующего усилителя, каждый из множества входов которого подключен к выходу соответствующего основного усилителя, при этом выход каждого из основных усилителей соединен с первым входом соответствующего усилителя блока суммирования поля фона с полями дефектов, второй вход каждого усилителя блока суммирования поля фона с полями дефектов соединен с выходом суммирующего усилителя, а выход каждого усилителя блока суммирования поля фона с полями дефектов соединен с соответствующим аналоговым входом многоканального аналого-цифрового преобразователя, а третьи входы всех усилителей соединены с ползунком второго потенциометра, первый вывод которого соединен с первым выводом первого потенциометра и соединен с положительным полюсом источника питания, а второй вывод второго потенциометра соединен со вторым выводом первого потенциометра и соединен с общим проводом устройства.
| УСТРОЙСТВО ДЛЯ МАГНИТНОГО КОНТРОЛЯ | 1996 |
|
RU2095804C1 |
| СТРОЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ МАГНИТНЫХ ПОЛЕЙ | 1988 |
|
RU2006850C1 |
| US 2005057246 А1, 17.03.2005 | |||
| JP 2003294707 А, 15.10.2003. | |||

