Изобретение относится к области неразрушающего контроля, в частности к внутритрубной дефектоскопии, и может быть использовано для контроля состояния стенок выведенных из рабочего режима технологических трубопроводов в обвязке компрессорных газоперекачивающих станций, а также для контроля водопроводов и труб заглубленных в грунт тепловых сетей.
Известен комплекс оборудования с тросовой протяжкой очистных поршней, используемый для очистки коротких прямолинейных участков трубопроводов, труба которых открыта с двух сторон на участке, подлежащем очистке [Абдулгафаров С.В., Гринь В.Г., Свистунов Ю.А. Бестраншейные технологии ремонта трубопроводов. Краснодар: Куб. Гау., 2009, - 192 с.].
Известный комплекс состоит из первой и второй лебедок с тросами и очистного поршня (или внутритрубного дефектоскопа). Проверяемый отрезок трубопровода шурфуется в начале контролируемого участка и в его конце. В обоих шурфах в стенке трубы вырезаются окна так, чтобы в образовавшийся лоток можно было поставить или принять из него очистной поршень или дефектоскоп. Через окна в трубе в нее втягивается трос, который крепится одним концом к поршню или к дефектоскопу, а другим концом к барабану лебедки. При протаскивании дефектоскопа тросом в трубе в запоминающем устройстве дефектоскопа накапливается информация о техническом состоянии стенки трубы.
Достоинством известного комплекса является его простота.
Недостатком известного комплекса при его использовании в дефектоскопии является сложность привязки дефектного места трубы к наружной поверхности грунта над трубопроводом.
Известен также комплекс для диагностики трубопроводов методом магнитометрии с помощью внутритрубного дефектоскопа [А.С. Судницын, Л.М. Лившиц. ДИАГНОСТИКА ТРУБОПРОВОДОВ ТЕПЛОВЫХ СЕТЕЙ МЕТОДОМ МАГНИТОМЕТРИИ С ПОМОЩЬЮ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА. Доклад на второй научно-практической конференции «Системы теплоснабжения. Современные решения», 16-18 мая 2006 г., http://www.rosteplo.ru/Tech_stat/stat_shablon.php?id=2367].
Известный комплекс состоит из внутритрубного магнитного снаряда-дефектоскопа, набора тросов для протягивания дефектоскопа в открытой с двух концов трубе, устройства (автомобиль или лебедка) для протягивания троса, очистного поршня и вычислительных средств для обработки записанных магнитограмм.
Достоинством известного комплекса является его простота и быстрота проведения контроля трубопровода.
Недостатком известного устройства является большая погрешность в привязке обнаруженных дефектов к наземной поверхности, что требует увеличивать размеры и количество шурфов для проведения ремонта трубы.
Наиболее близким к предлагаемому является комплекс внутритрубной дефектоскопии с тросовой протяжкой, используемый ООО «Подводгазэнергосервис» для контроля состояния прямолинейных участков трубопроводов небольшой протяженности [Внутритрубная диагностика подводных трубопроводов. Рекламная статья ООО «Подводгазэнергосервис», http://www.podvodges.ru/?Page=trubnaya].
Известный комплекс состоит из:
- робота для видеоинспекции трубопровода и протаскивания проводника (кроулер для протяжки троса);
- вытяжного троса;
- силового троса;
- автомобиля-тягача (или лебедки) для протаскивания силового троса;
- очистного поршня;
- внутритрубного инспектирующего снаряда;
- аппаратуры для анализа информации;
- погрузочно-разгрузочной техники.
Известное устройство используется на прямолинейных участках длиной 1,5÷3 км.
Достоинством известного устройства (комплекса) является его простота и возможность использования для дефектоскопии имеющиеся в эксплуатации внутритрубные инспектирующие снаряды.
Недостатком известного устройства (комплекса) является невысокая точность привязки дефектных мест трубы к наружной поверхности, что требует производить лишнюю шурфовку трубы для уточнения положения дефектного места.
Цель изобретения - повышение точности наземной привязки обнаруженных в трубопроводе дефектов относительно положения известных точек трубы.
Указанная цель достигается тем, что в комплекс дефектоскопии трубопроводов, состоящий из:
- внутритрубного магнитного дефектоскопа,
- первой лебедки,
- второй лебедки,
- вытяжного троса,
- силового троса,
- кроулера;
- компьютера,
введены:
- подвижный маркирующий модуль с краскопультом,
- радиопередающее устройство,
- радиоприемное устройство,
- направляющий трос,
- первый держатель направляющего троса,
- второй держатель направляющего троса,
- промежуточный держатель направляющего троса,
- идентификатор кольцевого шва,
причем
первый держатель направляющего троса установлен на поверхности грунта над трубой около рва над входом в контролируемую трубу, второй держатель направляющего троса установлен на поверхности грунта над трубой около рва над выходом из контролируемой трубы, а направляющий трос укреплен одним концом к первому держателю направляющего троса, вторым концом - ко второму держателю направляющего троса, а на повороте трубы в горизонтальной плоскости направляющий трос крепится к промежуточному держателю направляющего троса с помощью эластичных растяжек,
причем
направляющий трос введен в канавки первого и второго направляющих шкивов подвижного маркирующего модуля и прижат первым обрезиненным роликом к первому (пассивному) шкиву с обрезиненной канавкой, а вторым обрезиненным роликом прижат ко второму (ведущему) шкиву с обрезиненной канавкой привода тележки подвижного маркирующего устройства, соединенному через редуктор оборотов с выходным валом электромотора-редуктора, электрические выводы которого соединены с соответствующими выходами блока управления приводом, а входы блока управления приводом соединены с соответствующими выходами блока обработки сигналов датчиков, у которого входы управления скоростью двигателя соединены с выводами магнитного датчика, а вход выключения двигателя соединен с концевым выключателем подвижного маркирующего модуля,
причем
магнитный датчик установлен в геометрическом центре тележки подвижного маркирующего модуля,
при этом,
краскопульт подвижного маркирующего модуля обращен разбрызгивателем в сторону грунта, а выводы управления разбрызгивателем краскопульта соединены с соответствующими выходами радиоприемного устройства, антенна которого укреплена на внешней поверхности тележки подвижного маркирующего модуля,
причем
радиопередающее устройство и его антенна установлены в кормовой части внутритрубного снаряда-дефектоскопа, а к входам модулятора радиопередатчика подключен выход идентификатора кольцевого шва, на множественные входы которого подключены выходы магнитных датчиков снаряда дефектоскопа.
Анализ найденных в результате поиска патентных, информационных и каталожных материалов по фондам универсальной научно-технической библиотеки позволяет сделать вывод, что предлагаемое устройство неизвестно из уровня техники, т.е. оно является новым.
Кроме того, предлагаемое устройство не следует явным образом из анализируемых источников. Все перечисленные признаки в сочетании позволяют получить новый технический результат, не сводящийся к сумме свойств отдельных элементов, т.е. имеет изобретательский уровень.
Создание «Комплекса внутритрубной дефектоскопии с тросовой протяжкой» вызвано практической необходимостью сокращения времени диагностики технического состояния стенок труб технологических газопроводов в обвязке компрессорной станции и ускорения проведения ремонтных работ. Предлагаемое устройство позволяет достигнуть высокой точности привязки дефектных мест трубы к наземной поверхности и сократить объем вскрышных работ при ремонте трубопровода. Это является показателем промышленной целесообразности изобретения.
Изобретение поясняется чертежами.
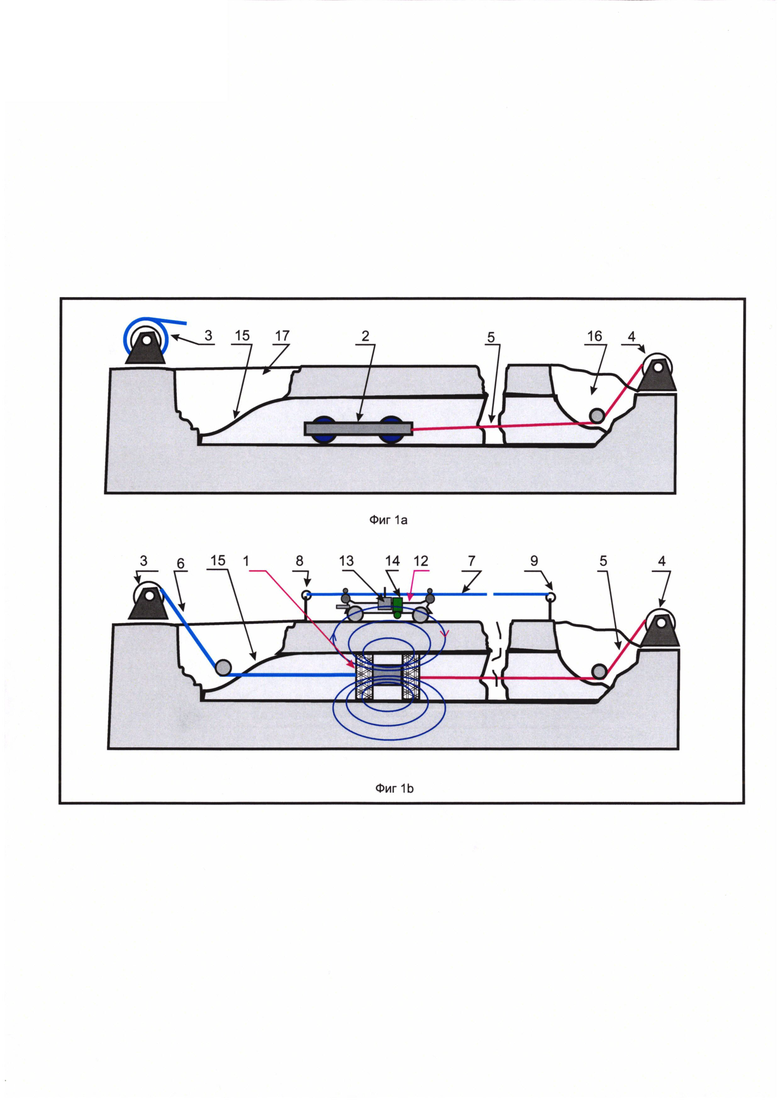
На Фиг. 1а показан состав комплекса в режиме протаскивания троса внутри трубы.
На Фиг. 1b показан состав комплекса в режиме очистки трубы и в режиме ее диагностики.
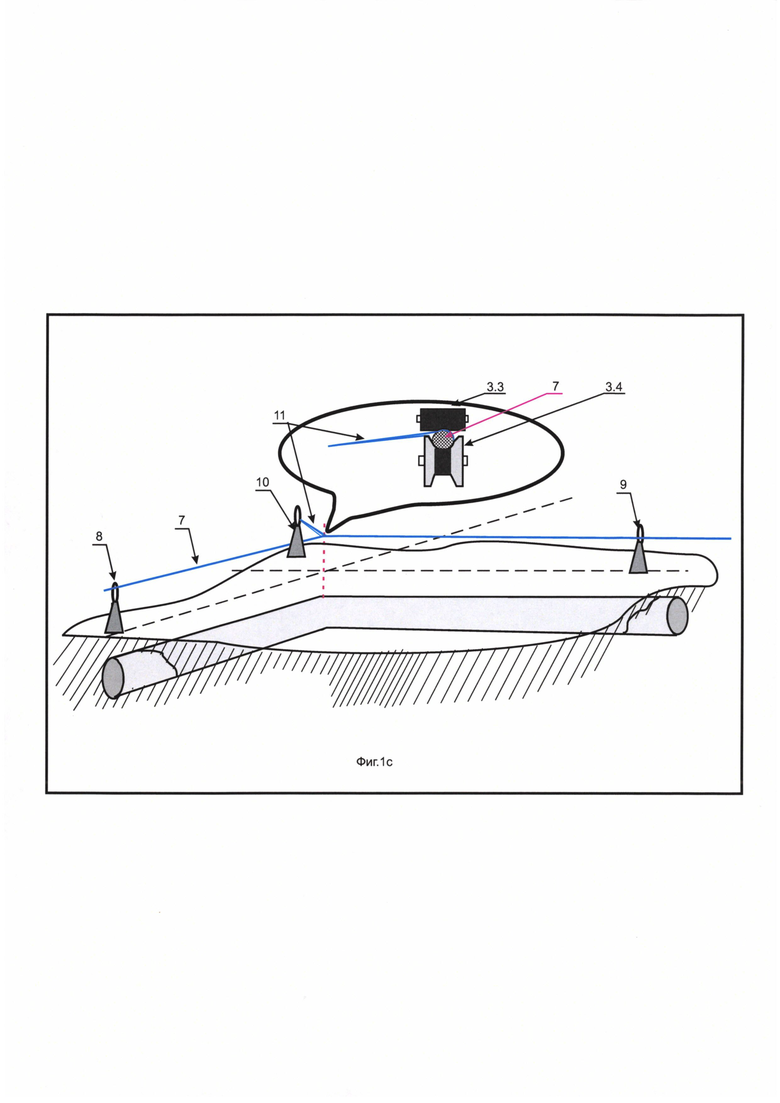
На Фиг. 1с показана схема расстановки держателей троса в местах изменения направления трубопровода в горизонтальной плоскости.
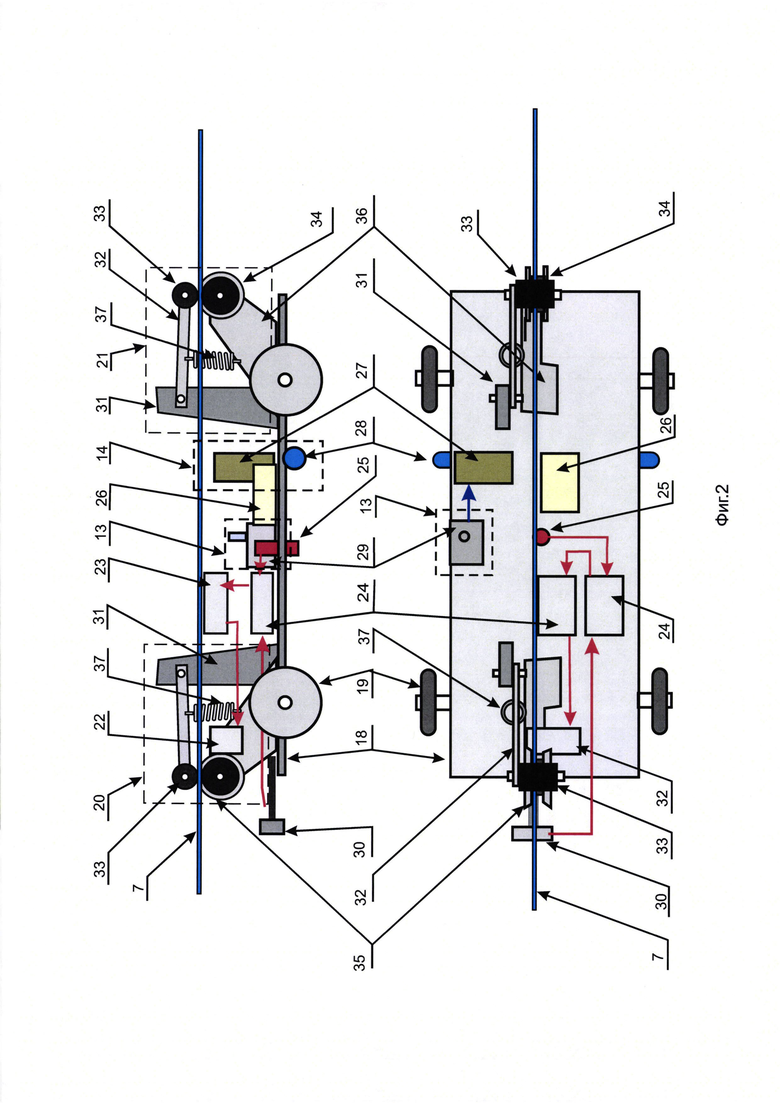
На Фиг. 2 показано устройство подвижного маркирующего модуля.
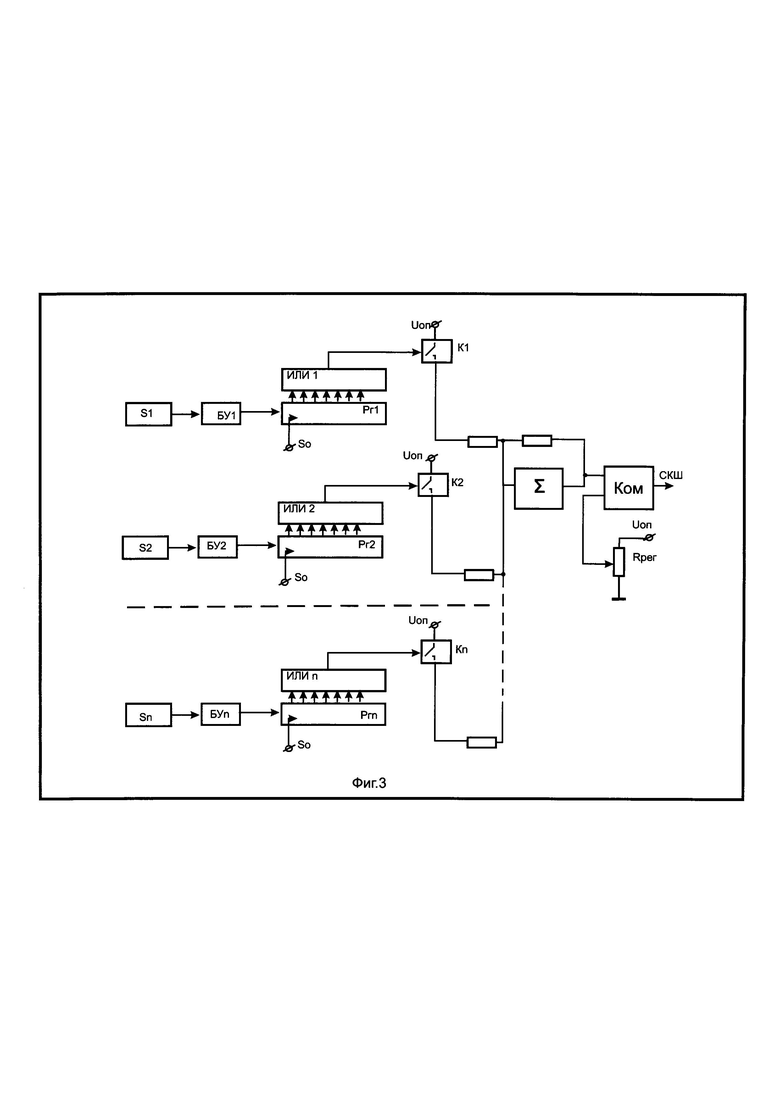
На Фиг. 3 показана возможная структурная схема идентификатора кольцевого шва.
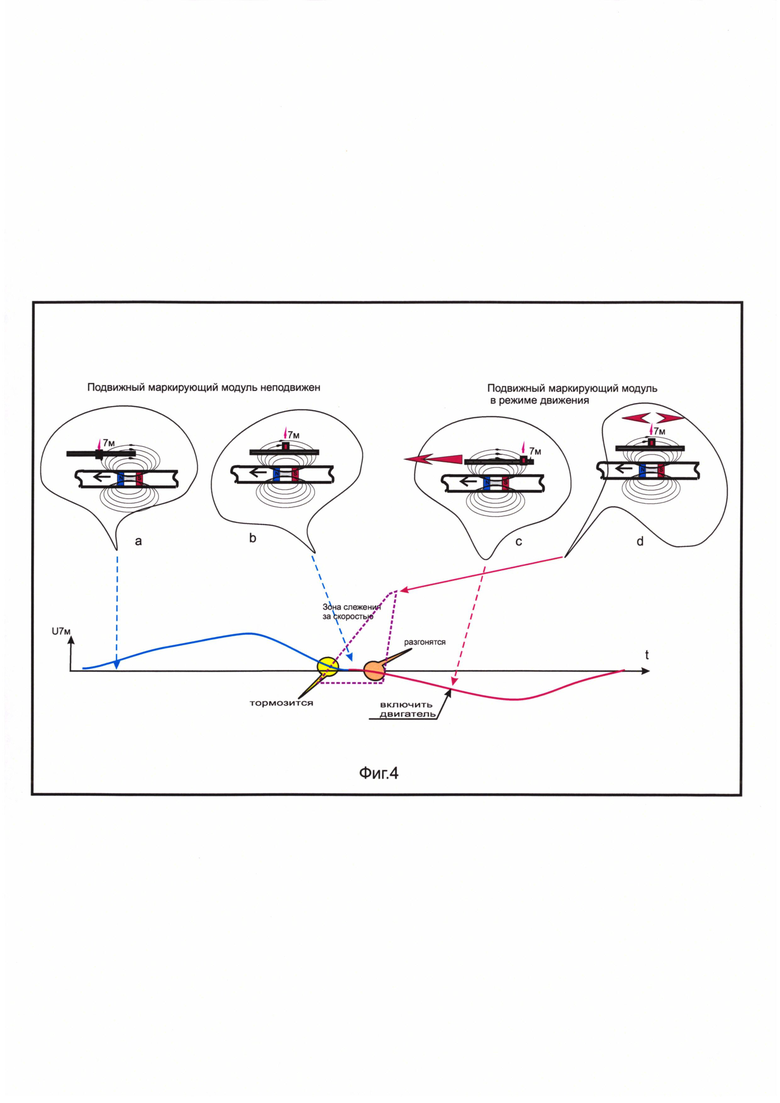
На Фиг. 4 показана временная диаграмма, иллюстрирующая формирование сигналов датчика магнитного поля подвижного маркирующего модуля.
Комплекс (Фиг. 1а, Фиг. 1b, Фиг. 1с) состоит из:
внутритрубного инспектирующего снаряда 1 с магнитной поисковой системой, со встроенным идентификатором кольцевого шва и с радиопередающим устройством (на рисунках не показано); кроулера 2; силовой лебедки 3; подающей лебедки 4; вытяжного троса 5; силового троса 6; направляющего троса 7; первого держателя направляющего троса 8; второго держателя направляющего троса 9; промежуточного держателя троса 10 (Фиг. 1с), растяжки 11; подвижного маркирующего модуля 12 с радиоприемным устройством 13 и устройство нанесения меток краской 14. Трубопровод обозначен на рисунке позицией 15. Пусковой лоток трубы - 16. Приемный лоток трубы - 17.
На Фиг. 1с показано крепление направляющего троса 7 к промежуточному держателю 10 с использованием растяжек 11, используемых в случае изменения направления трубопровода в горизонтальной плоскости. Допустимое изменение направления определяется возможностью тросовой протяжки перемещать внутритрубный снаряд-дефектоскоп через изгиб трубы в горизонтальной плоскости (обычно это возможно, если угол изгиба продольной оси трубы не более 5-10 градусов). Здесь же показано положение направляющего троса 7 и растяжек 11 в зазоре между направляющим шкивом 3.4 м и прижимным роликом 3.3 м подвижного маркирующего модуля 12 при прохождении им участка с изменением направления направляющего троса 7.
Возможная кинематическая схема подвижного маркирующего модуля показана на Фиг. 2. Из приведенной кинематической схемы видно, что подвижный маркирующий модуль может состоять из рамы 18, четырех опорных самоориентирующихся колес 19, первого 20 и второго 21 направляющих улов, электродвигателя 22, блока управления электрическим приводом 23, блока обработки сигналов датчиков 24, датчика магнитного поля 25, автономного источника тока 26. Устройство нанесения меток краской 14 состоит из краскопульта 27 и разбрызгивателя 28. Радиоприемное устройство 13 состоит из антенны и радиоприемника 29. Направляющий трос обозначен позицией 7. В передней части подвижного маркирующего модуля находится штанга с концевым выключателем 30.
Первый направляющий узел 20 состоит из стойки 31, рычага 32, обрезиненного прижимного ролика 33, ведущего шкива 35 с обрезиненной канавкой, стойки 36, пружины 37.
Второй направляющий узел 21 состоит из стойки 31, рычага 32, обрезиненного прижимного ролика 33, шкива 34 с обрезиненной канавкой, стойки 36, пружины 37.
В направляющем узле 20, расположенном в передней части подвижного маркирующего модуля ведущий шкив 35 с обрезиненной канавкой имеет кинематическую связь с выходным валом электродвигателя 22, электрические цепи которого соединены с соответствующими выходами блока управления электрическим приводом 23, входы которого соединены с соответствующими выходами блока обработки сигналов датчиков 24, первый информационный вход которого соединен с датчиком магнитного поля 25, а второй информационный вход соединен с контактами концевого выключателя 30. Датчик магнитного поля 25 размещен приблизительно в геометрическом центре рамы 18. Направляющий трос 7 проходит в обрезиненной канавке ведущего шкива 35 направляющего узла 20 и в обрезиненной канавке шкива 34 направляющего узла 21, и удерживается от выхода из канавок обрезиненными прижимными роликами 33. Питание электрического привода 23, блока обработки сигналов датчиков 24, датчика 25, краскопульта 27 и радиоприемника 29 осуществляется от электрического аккумулятора 26. Управление краскопультом 27 осуществляется сигналами с выхода радиоприемного устройства 29. Нагнетаемая насосом краскопульта 27 краска поступает в разбрызгиватель 28, размещенный под рамой 18. Краска распыляется разбрызгивателем 28 в сторону грунта.
Структура возможного аппаратного варианта исполнения идентификатора кольцевых швов может быть такой (Фиг. 3):
S1…Sn - магниточувствительные датчики магнитной поисковой системы снаряда-дефектоскопа с продольным намагничиванием,
БУ1…БУn - буферные усилители,
Рг1…Ргn - регистры сдвига,
ИЛИ 1…ИЛИ n - схемы «логическое ИЛИ»,
К1…Кn - аналоговые ключи,
Σ - аналоговый сумматор,
Ком - аналоговый компаратор,
Rpeг - регулятор порога,
Uoп - опорное напряжение,
СКШ - сигнал-признак кольцевого шва,
So - импульсные сигналы датчика одометра
Работа комплекса происходит следующим образом.
Перед началом диагностических работ проводятся подготовительные работы (Фиг. 1а, Фиг. 1b, Фиг. 1с).
Производится шурфовка мест на трубопроводе, намеченных для вырезки в трубе пускового окна (ров 16) и приемного окна (ров 17). Заглушаются концы участков трубы, не подлежащих диагностике. Вырезаются пусковое и приемное окна в контролируемой части трубы 15. На приемном конце устанавливается лебедка 3 с силовым тросом 6. На пусковой стороне устанавливается лебедка 4 с вытяжным тросом 5.
К рым-болту кроулера 2 цепляется конец вытяжного троса 5. Кроулер 2 устанавливается в пусковое окно и включается двигатель кроулера 2. Кроулер 2 движется внутри трубы 15 и протягивается внутри нее вытяжной трос 5. При выходе кроулера 2 на приемной стороне 17 контролируемого участка трубы 15 питание кроулера 2 отключают, извлекают его из рва 17 и вытяжной трос 5 перецепляют к концу силового троса 6, намотанного на барабане силовой лебедки 3. Затем запускается подающая лебедка 4 и силовой трос 6 вытяжным тросом 5, наматываемым на барабан подающей лебедки 4, втягивается в трубу 15 и протягивается до его пускового окна. На очередном этапе работ в пусковое окно трубы 15 со стороны пускового рва 16 устанавливают очистной поршень 1 и перецепляется силовой трос 6 от вытяжного троса 5 к переднему рым-болту очистного поршня (Фиг. 1b). К заднему рым-болту очистного поршня 1 цепляется вытяжной трос 5.
Запускается силовая лебедка 3 и очистной поршень 1 протягивается внутри трубы 15. Очистной поршень 1 выталкивает загрязнения в сторону приемного рва 17.
Удалив загрязнения на приемном лотке трубы 15, извлекают очистной поршень из рва 17. Отцепив от очистного поршня силовой 6 и вытяжной 5 тросы, их сцепляют вместе и повторно протаскивают силовой трос 6 в трубе 15 лебедкой 4 до появления сцепки тросов на пусковой стороне 16. Теперь силовой трос 6 прицепляется к переднему рым-болту внутритрубного магнитного снаряда-дефектоскопа 1, а вытяжной трос 5 к его заднему рым-болту.
Перед протаскиванием снаряда-дефектоскопа 1 на поверхности над трубой 15 укрепляют направляющий трос 7. Со стороны приемного рва 17 над трубой 15 устанавливается держатель 8 направляющего троса 7, а со стороны пускового рва 16 над трубой 15 устанавливается держатель 9 направляющего троса 7. Между держателями 8 и 9 натягивается направляющий трос 7. Если труба на диагностируемом участке изменяет направление в горизонтальной плоскости на угол, не превышающий нескольких градусов (5°-10°), то в местах изменения направления продольной оси трубы 15 устанавливаются промежуточные держатели 10 направляющего троса 7. При этом направляющий трос 7 крепится к промежуточному держателю с помощью эластичных, например капроновых, растяжек 11 (Фиг. 1с).
После завершения установки направляющего троса 7 над трубой 15 на грунте над трубой устанавливается подвижный маркирующий модуль 12 (Фиг. 1b). При соединении подвижного маркирующего модуля 12 с направляющим тросом 7 последний укладывается в обрезиненную канавку шкива 35 переднего направляющего узла 20 (Фиг. 2) и прижимается в обрезиненной канавке шкива 35 обрезиненным прижимным роликом 33, закрепленным на конце рычага 32, который притягивается в сторону рамы 18 подвижного маркирующего модуля 12 с помощью пружины 37. Точно также укладывается направляющий трос 7 в заднем направляющем узле 21. После установки на грунте подвижный направляющий модуль 12 оказывается впереди по направлению предстоящего движения находящегося в пусковом лотке снаряда-дефектоскопа 1. Включается электропитание подвижного маркирующего модуля 12. При включенном электропитании подвижного маркирующего модуля 12 начинают работать все его электронные устройства.
При включении силовой лебедки 3 (Фиг. 1b) начинается протяжка внутритрубного магнитного снаряда-дефектоскопа 1 лебедкой 3 за силовой трос 6. Снаряд-дефектоскоп 1 намагничивает до насыщения стенку обследуемой трубы 15. При этом ослабленное магнитное поле выходит за пределы стенки трубы и появляется над поверхностью грунта, где расположен над трубой подвижный маркирующий модуль 12. Если в передней части корпуса внутритрубного магнитного снаряда-дефектоскопа расположен северный полюс намагничивающей системы, а в задней части корпуса снаряда-дефектоскопа расположен южный полюс намагничивающей системы, то силовые линии магнитного поля впереди снаряда-дефектоскопа будут направлены вверх (по рисунку Фиг. 1b), и нормальная составляющая индукции магнитного поля будет иметь большую величину непосредственно над полюсным наконечником магнитной поисковой системы снаряда-дефектоскопа 1. В средней части над снарядом-дефектоскопом 1 силовые линии магнитного поля будут практически параллельны стенке трубы, и нормальная составляющая индукции магнитного поля будет минимальна. У заднего полюсного наконечника магнитной поисковой системы снаряда-дефектоскопа 1 силовые линии магнитного поля будут направлены вниз, в сторону трубы, и нормальная составляющая индукции магнитного поля будет иметь большое значение, но противоположного знака относительно индукции магнитного поля в головной части над снарядом-дефектоскопом 1 (Фиг. 3).
Внутритрубный магнитный снаряд-дефектоскоп 1 в трубе 15 обычно протягивается тросом со скоростью не более 0,5÷1,0 м/с. Допустим, что труба диаметром 520 мм. У дефектоскопа такого диаметра расстояние от одного наружного края намагничивающей системы до другого обычно около 600-750 мм. Это расстояние при протаскивании дефектоскопа лебедкой будет пройдено за 1,2÷0,6 с. Учитывая, что магнитное поле на поверхности грунта над трубой будет иметь в 1,5-2 раза большую протяженность вдоль трубопровода из-за растекания поля в пространстве, легко заметить, что время воздействия магнитного поля от снаряда-дефектоскопа магнитный датчик 25 (Фиг. 2) расположенного на грунте над трубой подвижного маркирующего модуля 12 будет не менее 1 секунды.
Протягиваемый внутри трубы 15 (Фиг. 1b) снаряд-дефектоскоп 1 приближается к месту, где на поверхности над трубой стоит подвижный маркирующий модуль 12. На подвижный маркерный модуль 12 надвигается магнитное поле переднего полюса намагничивающей системы снаряда-дефектоскопа 1. При некотором положении снаряда-дефектоскопа его магнитное поле начнет воздействовать на магнитный датчик 25 (Фиг. 2) подвижного маркирующего модуля 12 (Фиг. 1b). Сразу после первого включения электропитания блок обработки сигналов датчиков 24 не реагирует на сигнал положительной полярности (Фиг. 4а) с выхода магнитного датчика 25. Блок обработки сигналов датчиков 24 содержит интегрирующее звено, которое в режиме пуска заблокировано, и значение его выходного сигнала поддерживается на нулевом уровне. Так как на вход блока управления приводом 23 подается нулевое напряжение с блока обработки сигналов датчиков 24, то блок управления приводом 23 не инициирует включение ходового двигателя электропривода 22.
Перемещающееся вместе со снарядом-дефектоскопом 1 магнитное поле обгоняет подвижный маркирующий модуль 12. При некотором взаимном положении снаряда-дефектоскопа 1 и подвижного маркирующего модуля 12 нормальная составляющая индукции магнитного поля снизится практически до нуля (Фиг. 4b). Никаких изменений в состоянии электронных исполнительных устройств подвижного маркирующего модуля 12 это не вызовет. Дальнейшее перемещение внутритрубного снаряда-дефектоскопа 1 приведет к тому, что магнитное поле в зоне расположения магниточувствительного датчика 25 подвижного маркирующего модуля 12 изменит направление (Фиг. 4с). При этом изменится сигнал на выходе датчика магнитного поля 25, что приведет к активному режиму работы блока обработки сигналов датчиков 24 (Фиг. 2). Блок обработки сигналов датчиков 24 начнет интегрировать напряжение сигнала, поступающего от магниточувствительного датчика 25. Из блока обработки сигналов датчиков 24 на соответствующий вход 23 начнет поступать нарастающий по величине управляющий сигнал (Фиг. 4с).
Блок управления приводом 23 включает электродвигатель 22. Электродвигатель 22 начинает разгоняться и вращает шкив 35 с обрезиненной канавкой переднего направляющего узла 20 (Фиг. 2), к которому обрезиненным прижимным роликом 33 прижат неподвижный направляющий трос 7. Подвижный маркирующий модуль 12 приходит в движение с некоторой начальной скоростью, меньшей скорости движения внутритрубного снаряда-дефектоскопа 1. В этом режиме снаряд-дефектоскоп 1 продолжает двигаться впереди расположенного над ним на грунте подвижного маркирующего модуля 12. Величина магнитного поля, действующего на магнитный датчик 25 подвижного маркирующего модуля 12, увеличивается (Фиг. 4с). Увеличивается и величина выходного сигнала с магнитного датчика 25 (график U7 м на Фиг. 4), а следовательно, и величина напряжения на выходе интегрирующего звена в блоке обработки сигналов датчиков 24. Увеличивающееся напряжение на выходе блока обработки сигналов датчиков 24 приводит к увеличению напряжения на выходе блока управления электроприводом 23 и, следовательно, приводит к увеличению скорости вращения электродвигателя 22. В результате этих процессов подвижный маркирующий модуль 12 начинает разгоняться и перемещается относительно внутритрубного снаряда-дефектоскопа 1 так, что магнитный датчик 25 вновь оказывается в той части магнитного поля, где его выходной сигнал близок к нулю (Фиг. 4d). При нулевом сигнале с выхода магнитного датчика 25 напряжение на выходе интегрирующего звена в 24 перестает изменяться, в результате чего электродвигатель 22 начинает вращаться с постоянной скоростью. С постоянной скоростью продолжит движение и подвижный маркирующий модуль 12. Зона изменения магнитного поля около нулевого значения его нормальной составляющей является зоной слежения за скоростью перемещения магнитного поля, то есть зоной слежения за скоростью перемещения внутритрубного снаряда-дефектоскопа (Фиг. 4d). Если скорость перемещения снаряда-дефектоскопа 1 понизится, то магнитный датчик 25 подвижного маркирующего устройства 12 окажется в магнитном поле, где его выходное напряжение начнет возрастать (график U7 м на Фиг. 4). Это приведет к воздействию на интегратор в блоке обработки сигналов датчиков 24 напряжения, уменьшающего значение интеграла. Напряжение на выходе интегратора начнет убывать, что приведет к уменьшению скорости вращения электродвигателя 22. Если снаряд-дефектоскоп увеличит скорость перемещения, то магнитный датчик 25 попадет в зону нарастания магнитного поля противоположной полярности. Сигнал магнитного датчика 25 сменит знак и начнет возрастать по амплитуде. Это вызовет увеличения напряжения на выходе интегратора, что приведет к повышению скорости вращения электродвигателя 4 м. Подвижный маркирующий модуль начнет догонять внутритрубный дефектоскоп. Таким образом, подвижный маркирующий модуль 12 будет следить за изменениями скорости движения снаряда-дефектоскопа 1 и следовать за ним по поверхности грунта вдоль трубы с некоторой ошибкой слежения за его серединой, протягиваясь ведущим шкивом 35 с обрезиненной канавкой по направляющему тросу 7.
На борту магнитного снаряда дефектоскопа 1 размещена его штатная магнитная поисковая система, которая позволяет выявлять дефекты потери металла, трещины, а также различного происхождения утолщения стенки трубы. Все эти данные, а также значение текущего пути и угол возможного поворота дефектоскопа вокруг его продольной оси регистрируются в бортовом накопителе. Одометрическая система счисления пути имеет ограниченную точность. Обычно, если труба хорошо очищена, предельная точность колесных одометром не превышает 0,1÷0,25% от пройденного пути. При работе на магистральных газопроводах в большинстве случаев трудно достигнуть точности более 0,5÷1,0%. По этой причине пытаются сократить абсолютную погрешность, отсчитывая положение обнаруженной аномалии от некоторого легко обнаруживаемого на трубе места. Таким местом на трубе является кольцевой шов или такие элементы конструкции как отводы, краны, приварки выводов контрольно измерительных колонок. При привязке положения дефектов к кольцевым швам требуется измерить расстояние не более половины дистанции между швами. Это всего L=11 м/2<(5÷6)м. Такое расстояние даже грубый одометр с погрешностью 1% позволит оценить относительно кольцевого шва с абсолютной ошибкой не более ±5÷6 см. Этого более чем достаточно для определения на поверхности грунта позиции для шурфовки дефектного места. Проблемой является определение на поверхности места положения кольцевых швов.
Для решения этой проблемы в данном устройстве предложено на поверхности грунта над трубой перемещать синхронно с внутритрубным дефектоскопом 1 подвижный маркирующий модуль 12 с установленным на нем краскопультом 27, который запускается всякий раз, когда внутритрубный снаряд дефектоскоп обнаружит кольцевой шов. Краскопульт 27 при этом оставляет на грунте над местом обнаружения кольцевого шва метку из красящего вещества. Идентификацию кольцевого шва на борту снаряда-дефектоскопа осуществляет автоматическое устройство (или специальная подпрограмма бортового компьютера), вводимое в состав аппаратуры (или в программное обеспечение бортового компьютера) снаряда-дефектоскопа 1. Признак идентифицированного шва передается по радиоканалу со снаряда-дефектоскопа 1 на радиоприемное устройства 29 (Фиг. 2) подвижного маркерного устройства 12. Сигналом с радиоприемника 29 запускается краскопульт 27 и метка наносится разбрызгиванием краски на грунт.
Идентификатор кольцевых швов (Фиг. 3) в его возможном аппаратном исполнении работает таким образом.
Внутритрубный магнитный дефектоскоп 1 перемешается внутри трубы 15 и намагничивает ее стенки с помощью магнита магнитной поисковой системы. Магниточувствительные датчики S1…Sn, расположенные по периметру окружности цилиндрического корпуса снаряда-дефектоскопа 1, преобразуют рассеиваемое около стенки трубы 15 магнитное поле в электрические сигналы. При появлении в зоне магнитной поисковой системы дефектов потери металла величина поля, рассеиваемого около стенки трубы, увеличивается. При появлении утолщенных участков стенки трубы в зоне намагничивания величина индукции поля, рассеиваемого около стенки трубы, уменьшается. В соответствии с изменениями величины магнитного поля изменяется и величина выходных сигналов магниточувствительных датчиков S1…Sn, прижатых держателями датчиков внутритрубного снаряда-дефектоскопа к внутренней стенке трубы. Кольцевой шов представляет собой локальное утолщение стенки трубы, протяженность которого вдоль трубы около 25 мм. Сигнал от шва в идеальном случае должен сопровождаться уменьшением величины его напряжения на дистанции 25 мм. Следует учесть, что неточность изготовления контейнеров, в которых установлены датчики магнитного поля, неточность их установки на дефектоскопе, перекосы дефектоскопа в процессе движения, изменение расстояния от стенки трубы до поверхности датчика, когда корпус держателя датчиков наезжает на шов, а также неравномерность ширины кольцевого шва, приводят к тому, что датчики, расположенные по периметру внутренней стенки трубы, начинают реагировать на появление кольцевого шва не одновременно. Также не одновременно на всех датчиках пропадают сигналы от кольцевого шва. Однако, на некотором продольном протяжении шва все датчики, или их большая часть, одновременно начнут формировать сигналы, возбуждаемые кольцевым швом. На Фиг. 3 магниточувствительные датчики снаряда-дефектоскопа 1, используемые идентификатором кольцевых швов, обозначены S1…Sn, где число n может равняться числу датчиков снаряда-дефектоскопа 1 или быть меньше.
Для развязки измерительных цепей диагностической системы снаряда-дефектоскопа 1 от информационных цепей идентификатора кольцевых швов сигналы датчиков S1…Sn подаются на входы буферных усилителей БУ1…БУn. Буферные усилители БУ1…БУn выполняют функции преобразователей аналоговых сигналов магнитных датчиков в логические сигналы «1» или «0». С выходов буферных усилителей БУ1…БУn логические сигналы подаются на информационные входы сдвиговых регистров Рг1…Ргn. На входы управления сдвигом сдвиговых регистров Рг1…Ргп подаются импульсные сигналы So одометра. Сдвиг логических сигналов по разрядам сдвиговых регистров происходит одновременно для всех регистров. Если импульсы одометра следуют после прохождения пути 5 мм, то входной логический сигнал будет передаваться с одного разряда на другой через 5 мм пути снаряда-дефектоскопа. Если на выходе одного из магниточувствительных датчиков снаряда-дефектоскопа появился сигнал, а на другом сигнал появится через 2 мм пути, то на выходе первого регистра логическая единица появится в первом разряде, на втором регистре будут сохраняться во всех разрядах нули. Однако через 5 мм пути логические единицы будут присутствовать в первом и втором разрядах первого регистра и в первом разряде второго регистра. Если наблюдается на трубе кольцевой шов, то на втором или третьем шаге одометра на всех регистрах идентификатора кольцевого шва будут наблюдаться логические единицы. Выходные сигналы со всех разрядов каждого сдвигового регистра поступают на входы соответствующей конкретному сдвиговому регистру схемы «логическое ИЛИ». Выходной сигнал каждой из схем «Логическое ИЛИ» управляет соответствующим аналоговым ключом К1…Кn. Замыкание соответствующего ключа К1…Кn приводит к подаче на соответствующий вход сумматора Σ напряжения Uoп/n. Здесь Uoп - стабилизированное опорное напряжение. Выходной сигнал сумматора Σ поступает на один из входов компаратора Ком, на второй вход которого подается напряжение сравнения, формируемое из опорного напряжения Uoп с помощью настроечного потенциометра Rрег. Если на кольцевой шов реагирует большая (заранее оговоренная) часть датчиков магнитного поля, то напряжение с выхода сумматора напряжений Σ превысит установленный порог и на выходе компаратора Ком появится логический сигнал СКШ, являющийся признаком идентификации кольцевого шва. На некотором шаге одометра логические сигналы, соответствующие кольцевому шву, на выходах сдвиговых регистров Рг1…Ргn начнут пропадать, и напряжение на выходе сумматора напряжений Σ начнет убывать, понижаясь ниже заданного настройкой Rрег порога. При этом логический сигнал, соответствующий признаку кольцевого шва на выходе СКШ компаратора Ком пропадет.
Логический сигнал СКШ, сформированный компаратором Ком, подается на вход модулятора радиопередающего устройства РП (на рисунках не показано), установленного на снаряде дефектоскопе 1. Радиопередающее устройство РП излучает модулированный сигнал. Радиосигнал распространяется по трубе и выходит из ее открытого конца в окружающее пространство. Радиоволны достигают антенны радиоприемного устройства 13 (Фиг 1b), установленного на подвижном маркирующем модуле 12. Демодулированный радиосигнал преобразуется на выходе радиоприемного устройства 13 в силовой сигнал, который приводит в действие устройство нанесения меток краской 14. Краскопульт 27 устройства нанесения краски 14 начинает подавать краску в разбрызгиватель 28 (Фиг. 2). Разбрызгиватель 28 разбрызгивает яркую краску на грунт под подвижным маркирующим модулем 12, помечая место на грунте над трубой, которому соответствует место на трубе 15, где был обнаружен кольцевой шов. После прохождения комплексом внутритрубной дефектоскопии всего контролируемого участка трубы на поверхности грунта над трубой будут нанесены краской метки, под которыми на трубе 15 находятся кольцевые швы.
После обработки магнитограммы, записанной регистратором снаряда-дефектоскопа 1, определяют в записях расстояние до дефектных мест от соответствующих кольцевых швов. Расстояние между кольцевыми швами обычно в пределах 10-12 метров. Для определения с поверхности грунта местоположения дефектов достаточно с помощью рулетки отмерить необходимое расстояние от соответствующей конкретному шву метки. Проекции дефектных мест на поверхности грунта помечаются любым удобным способом. Далее производится шурфовка в отмеченных местах и ремонт стенки трубы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ внутритрубной диагностики трубопроводов с использованием метода "сухой протяжки" | 2017 |
|
RU2658122C1 |
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| Способ обнаружения несанкционированных врезок в трубопровод | 2018 |
|
RU2681552C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗОНД ДЛЯ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ МАТЕРИАЛА СТЕНКИ ТРУБЫ | 2005 |
|
RU2293981C1 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2369783C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
Предложенный комплекс внутритрубной дефектоскопии с тросовой протяжкой относится к средствам для проверки технического состояния коротких прямолинейных или изгибных отрезков трубопровода. Данный комплекс содержит внутритрубный магнитный дефектоскоп, первую и вторую лебедку, вытяжной трос, силовой трос, кроулер, компьютер, подвижный маркирующий модуль с краскопультом, радиопередающее устройство, радиоприемное устройство, направляющий трос, первый и второй держатель направляющего троса, промежуточный держатель направляющего троса, идентификатор кольцевого шва. Первый держатель направляющего троса установлен на поверхности грунта над трубой около рва над входом в контролируемую трубу, второй держатель направляющего троса установлен на поверхности грунта над трубой около рва над выходом из контролируемой трубы, а направляющий трос укреплен одним концом к первому держателю направляющего троса, вторым концом - ко второму держателю направляющего троса, а на повороте трубы в горизонтальной плоскости направляющий трос крепится к промежуточному держателю направляющего троса с помощью эластичных растяжек. Направляющий трос введен в канавки первого и второго направляющих шкивов подвижного маркирующего модуля, магнитный датчик установлен в геометрическом центре тележки подвижного маркирующего модуля, радиопередающее устройство и его антенна установлены в кормовой части внутритрубного снаряда-дефектоскопа, а к входам модулятора радиопередатчика подключен выход идентификатора кольцевого шва, на множественные входы которого подключены выходы магнитных датчиков снаряда дефектоскопа. Данное изобретение обеспечивает повышение точности наземной привязки обнаруженных в трубопроводе дефектов относительно положения известных точек трубки. 5 ил.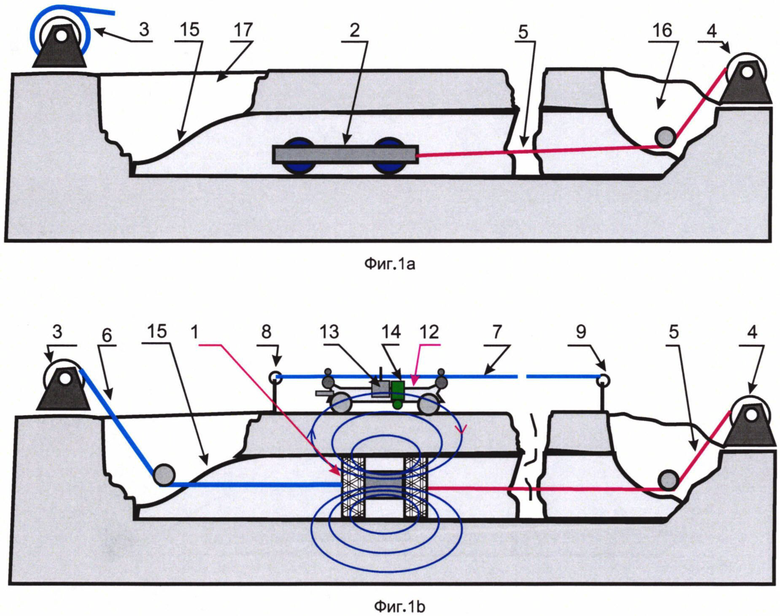
Комплекс внутритрубной дефектоскопии с тросовой протяжкой, состоящий из:
- внутритрубного магнитного дефектоскопа,
- первой лебедки,
- второй лебедки,
- вытяжного троса,
- силового троса,
- кроулера;
- компьютера,
введены:
- подвижный маркирующий модуль с краскопультом,
- радиопередающее устройство,
- радиоприемное устройство,
- направляющий трос,
- первый держатель направляющего троса,
- второй держатель направляющего троса,
- промежуточный держатель направляющего троса,
- идентификатор кольцевого шва,
причем первый держатель направляющего троса установлен на поверхности грунта над трубой около рва над входом в контролируемую трубу, второй держатель направляющего троса установлен на поверхности грунта над трубой около рва над выходом из контролируемой трубы, а направляющий трос укреплен одним концом к первому держателю направляющего троса, вторым концом - ко второму держателю направляющего троса, а на повороте трубы в горизонтальной плоскости направляющий трос крепится к промежуточному держателю направляющего троса с помощью эластичных растяжек,
причем направляющий трос введен в канавки первого и второго направляющих шкивов подвижного маркирующего модуля и прижат первым обрезиненным роликом к первому (пассивному) шкиву с обрезиненной канавкой, а вторым обрезиненным роликом прижат ко второму (ведущему) шкиву с обрезиненной канавкой привода тележки подвижного маркирующего устройства, соединенному через редуктор оборотов с выходным валом электродвигателя, электрические выводы которого соединены с соответствующими выходами блока управления приводом, а входы блока управления приводом соединены с соответствующими выходами блока обработки сигналов датчиков, у которого входы управления скоростью двигателя соединены с выводами магнитного датчика, а вход выключения двигателя соединен с концевым выключателем подвижного маркирующего модуля,
причем магнитный датчик установлен в геометрическом центре тележки подвижного маркирующего модуля,
при этом краскопульт подвижного маркирующего модуля обращен разбрызгивателем в сторону грунта, а выводы управления разбрызгивателем краскопульта соединены с соответствующими выходами радиоприемного устройства, антенна которого укреплена на внешней поверхности тележки подвижного маркирующего модуля,
причем радиопередающее устройство и его антенна установлены в кормовой части внутритрубного снаряда-дефектоскопа, а к входам модулятора радиопередатчика подключен выход идентификатора кольцевого шва, на множественные входы которого подключены выходы магнитных датчиков снаряда дефектоскопа.
| Вибрационный конвейер с двумя резонансными массами | 1959 |
|
SU123457A1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2010 |
|
RU2439550C1 |
| Способ переработки спека для получения глинозема при параллельно-комбинированной схеме "Байер-спекание" | 1959 |
|
SU132208A1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕЗЕРВИРОВАННЫМИ ДАТЧИКАМИ ДЕФЕКТОВ И ОДОМЕТРАМИ | 2009 |
|
RU2406082C1 |
| JPS 53422794 A, 18.04.1978 | |||
| US 3967194 A, 29.06.1976. | |||

