Изобретение относится к области неразрушающего контроля, в частности к внутритрубной дефектоскопии, и может быть использовано для контроля технического состояния стенок труб непосредственно в процессе транспортировки поставляемого по трубе жидкого или газообразного продукта, например газа по магистральному газопроводу.
Известен «Дефектоскоп-снаряд для внутритрубных обследований трубопроводов» [Патент RU 2102738], использующий магнитные поля рассеяния (MFL) для обнаружения дефектов потери металла и трещин в стенке трубы и регулятор скорости движения снаряда с использованием перепуска газового потока по внутренней полости цилиндрического корпуса снаряда-дефектоскопа.
Недостатком известного дефектоскопа является необходимость использования магнитной системы больших габаритов и массы для обеспечения требуемого значения магнитной индукции в стенке трубы для надежного обнаружения дефектов и оценки их размеров. Это приводит к тому, что размер магнитной поисковой системы в радиальном направлении по трубе составляет около hмс=1/6Rт (Rт - радиус трубы) с каждой стороны системы, что не позволяет проходить безаварийно сужения менее 90% от диаметра трубопровода.
При эксплуатации известного устройства необходимо предварительно обнаружить и удалить непроходимые сужения на трубопроводе.
Магнитный контроль эффективен при скорости перемещения магнитной системы около 2-3 м/с. Чтобы понизить скорость движения дефектоскопа, применяют перепуск транспортируемого газа вдоль корпуса дефектоскопа по байпасному каналу. В известном дефектоскопе канал для перепуска газа организуется в центральной части цилиндрического корпуса аппарата. Для прохождения сужения 0.9Dy необходимо обеспечить дополнительный просвет между магнитопроводом магнитной поисковой системы и цилиндрическим корпусом снаряда-дефектоскопа. Этот просвет в радиальном направлении составит около Δ=0.05 внутреннего диаметра Dт трубы по всей образующей окружности. С учетом сказанного диаметр полости для перепуска газа внутри цилиндрического корпуса снаряда-дефектоскопа составит
Dп=2RТ-2hмс-2Δ=Dт(1-1/6·2-0.05·2)=Dт(1-0.16·2-0.1)=0.58D.
Сечение окна для перепуска газа составит около
S=π(0.58·D)2/4=0.336πD2/4, что составит 33÷34% от сечения трубы.
Такого сечения окна для перепуска газа достаточно для работы в газовом потоке, движущемся со скоростью до 7 м/с. Коммерческие поставки газа производятся на скоростях более 7-10 м/с. Сужение диаметра перепускного канала понижает допустимое для регулятора скорости верхнее значение скорости транспортировки газа. Следовательно, недостатком известного устройства является узость диапазона допустимых скоростей транспортировки газа, при которых возможно автоматическое поддержание требуемой для качественной диагностики скорости движения снаряда-дефектоскопа.
Известно «Устройство для контроля геометрических параметров трубопровода» (Патент RU 2390769), в котором для регулировки скорости движения внутритрубного инспектирующего снаряда используется пространство между наружной поверхностью цилиндрического корпуса снаряда и внутренней поверхностью трубы. Радиальный зазор между корпусом снаряда и стенкой трубы по всей окружности цилиндра трубы может быть выполнен так, что будет занимать около 1/3 внутреннего радиуса трубы. То есть наружный диаметр цилиндрического корпуса снаряда может быть 1/3 D. Сечение окна для перепуска газа в этом случае может составить
S=π(D2-1/9·D2)/4=0.79πD2/4.
Это составляет 79% т сечения трубы, что в 2.3 раза превышает сечение окна перепуска при использовании внутреннего байпаса.
Таким образом, внутритрубный инспектирующий снаряд с перепуском газа снаружи корпуса снаряда может обеспечить окно перепуска газа, в 2.3 раза превышающее окно перепуска газа, выполненное внутри корпуса инспектирующего снаряда, если наружный диаметр корпуса снаряда не превысит 1/3 внутреннего диаметра трубы.
В известном устройстве для перемещения заслонки, регулирующей перепуск газа, применяется гидравлический привод. Достоинство гидравлического привода - это возможность самозакрывания заслонки при пропадании электропитания бортового источника. Недостаток гидравлического привода - сложность конструктивного исполнения и сложность обслуживания.
Известны наружные дефектоскопы фирмы "Innospection" (рекламные документы фирмы "Innospection" - www.innospection.com), работающие с использованием низкочастотного вихретокового метода неразрушающего контроля с намагничиванием обследуемой трубы «SLOFEC-метод» [1], который оказывается способным эффективно выявлять дефекты как на стороне размещения дефектоскопа, так и на противоположной стороне. В [1] указывается, что метод SLOPFEC позволяет при одинаковых уровнях намагничивания обнаруживать дефекты на противоположной стороне стенки изделий со стенкой, в 2-3 раза более толстой, чем это позволяет дефектоскоп, использующий MFL метод.
Достоинством известного устройства является возможность регистрировать дефекты как на стороне размещения датчика (наружные), так и на противоположной стороне (внутренние) при более низких напряженностях магнитного поля, чем это требуется в MFL дефектоскопах.
Недостатком известного устройства является малая скорость линейного перемещения (около 0.5 м/с).
Наиболее близким к предлагаемому является внутритрубный магнитный дефектоскоп с регулятором скорости движения (Uwe Thuenemann, Rosen Europe The Netherlands. Control your speed. Printed from WORLD PIPELINES, April 2003) [2].
Известное устройство представляет инспекционный снаряд с цилиндрическим корпусом, имеющим перепускной канал в центре корпуса, с заслонкой регулятора потока перепускаемого газа в головной части снаряда. На наружной поверхности корпуса размещаются намагничивающие блоки. В межполюсном пространстве намагничивающих блоков размещены преобразователи полей рассеяния в электрические сигналы. Тянущее усилие обеспечивается опорно-тянущими эластичными манжетами в головной и хвостовой частях снаряда в сочетании с заслонкой в перепускном канале. Измерение пройденного пути осуществляется колесным одометром. В герметичном отсеке аппарата размещаются источники питания и электронная аппаратура для обработки датчиковых сигналов, формирования управляющих сигналов, а также для регистрации диагностической информации и пространственных координат дефектоскопа.
Достоинством известного устройства является возможность проведения диагностики стенок труб на оптимальной скорости движения дефектоскопа в некотором диапазоне скоростей движения транспортируемого потока. Недостатками известного устройства являются большая масса дефектоскопа, ограниченные возможности по прохождению сужений в трубопроводе, а также ограниченное верхнее значение скорости транспортирования газа (до 7 м/с). (M.V.Bekker, Uwe Thuenemann, Т.Beuker, S.Paeper. Re-Assessment survey of large diameter pipelines using compact multi-porpose Inline Inspection tools. Proceedings of IPC 2004 5th International Pipeline Conference October, 4-8, 2004, Calgary, Alberta, Canada [3]).
Следующим недостатком известного устройства является необходимость применения двух видов намагничивающих устройств - с продольной и поперечной ориентацией магнитного поля для выявления продольного и поперечного растрескиваний в стенке трубы.
Цель изобретения - улучшение эксплуатационных характеристик устройства для контроля стенок трубопроводов, состоящее в повышенной способности к прохождению сужений внутри трубопровода, и сохранение оптимальной скорости перемещения устройства для контроля стенок трубопроводов в широком диапазоне скоростей транспортирования газа и возможности выявления разноориентированных трещин с использованием всего одной намагничивающей системы.
Указанная цель достигается тем, что в известное устройство, состоящее из цилиндрического несущего корпуса, эластичных манжет, герметичного контейнера, намагничивающей системы в виде группы магнитных блоков, датчиков дефектов, аппаратуры возбуждения преобразователей и аппаратуры приема сигналов, регистрирующей аппаратуры, устройств измерения пути, источников электропитания, введены несколько опорно-несущих колес со встроенными электромеханическими генераторами электроэнергии, несколько опорно-несущих колес со встроенными одометрическими датчиками, группа строп-тросов, тяга с датчиком усилия, трос-тяга, барабан, электромагнитная муфта, мотор-редуктор, блок управления скоростью мотор-редуктора, а датчики дефектов выполнены в виде вихретоковых датчиков, причем цилиндрическое основание устройства для контроля стенок трубопроводов выполнено в виде трубы-основания, в головной части которой укреплена своим центром манжета веерного типа с числом ребер - n, края которой соединены с первыми концами n строп-тросов, вторые концы которых введены в соответствующий из n пропилов в стенке трубы-основания и соединены с тягой в передней ее части, а к задней части тяги присоединена первым концом гибкая трос-тяга, задняя часть которой прикреплена к барабану, вал которого соединен с выходным валом электромагнитной муфты, входной вал которой соединен с валом мотор-редуктора, обмотки управления которого соединены с выходными клеммами блока управления скоростью мотор-редуктора, входные клеммы которого соединены с соответствующими выводами колесных одометров, оси которых закреплены на свободных концах соответствующих упругих опор, закрепленных в хвостовой части трубы-основания, в средней части которой закреплены два ряда пружинных опор с размещенными на их верхней части постоянными магнитами и вихретоковыми датчиками, установленными в зазоре между магнитным полюсом и стенкой трубы, причем второй ряд опор смещен по окружности цилиндра относительно первого так, чтобы обеспечить сплошное перекрытие зоной контроля датчиков всей внутренней поверхности трубы, при этом катушки возбуждения вихретоковых датчиков выполнены в виде цилиндрических катушек, а первая сигнальная катушка и вторая сигнальная катушка имеют прямоугольную форму, и вторая сигнальная катушка вставлена узкой стороной в первую сигнальную катушку под прямым углом так, что получившаяся фигура имеет форму креста и обе катушки вставлены внутрь катушки возбуждения так, чтобы оси сигнальных катушек были перпендикулярны оси катушки возбуждения, причем первая сигнальная катушка ориентирована вдоль направления движения устройства для контроля стенок трубопроводов, а вторая сигнальная катушка ориентирована поперек направления движения устройства для контроля стенок трубопроводов, при этом выводы катушек возбуждения соединены с соответствующими выводами усилителя сигналов возбуждения, а выводы сигнальных катушек соединены с соответствующими входами многоканального приемника сигналов, выходы которого соединены с соответствующими входами регистратора сигналов, к соответствующим входам которого присоединены выходы соответствующих одометров, причем выходы встроенных в опорные колеса генераторов переменного тока соединены с соответствующими выпрямителями, выходы которых соединены с первыми выводами обмоток катушек электромагнитной муфты, вторые выводы которых соединены с соответствующими выводами буферного аккумулятора, а электрический вывод датчика усилия соединен с соответствующим входом блока управления мотор-редуктором, причем редуктор мотор-редуктора выполнен самостопорящимся. Анализ найденных в результате поиска патентных, информационных и каталожных материалов позволяет сделать вывод, что предлагаемое изобретение не известно из уровня техники, т.е. оно является новым.
Предлагаемое устройство не следует явным образом из анализируемых источников, т.е. имеет изобретательский уровень. Рассматриваемое техническое устройство востребовано практикой, так как при обследовании существующих магистральных газопроводов и газопроводов-отводов наблюдается изменение формы поперечного сечения и диаметра трубы до размеров, препятствующих прохождению магнитных (MFL) дефектоскопов, что приводит к застреванию MFL дефектоскопа в трубопроводе и требует вскрышных и огневых работ для его извлечения из полости трубопровода. Предлагаемое устройство позволяет единственной намагничивающей системой обеспечить выявление растрескиваний различной ориентации, что в два раза снижает вес снаряда дефектоскопа по сравнению со снарядом MFL типа, использующего для обнаружения продольного растрескивания секцию с поперечным намагничиванием и для выявления поперечного растрескивания - секцию продольного намагничивания. Большой вес двухсекционных снарядов большого диаметра требует исполнения особо прочного фундамента для камер запуска и приема снарядов дефектоскопов. Это ограничивает применяемость средств внутритрубной диагностики. Предлагаемое устройство для контроля стенок трубопроводов способно преодолевать более узкие места в трубах по сравнению с MFL дефектоскопами при тех же характеристиках по размерам выявляемых дефектов. Кроме того, предлагаемый вариант позволяет всего одной секцией выявлять трещины как продольной, так и поперечной ориентации при использовании одной системы намагничивания и позволяет работать с обычными камерами запуска и приема очистных поршней. Это подтверждает промышленную полезность предлагаемого решения.
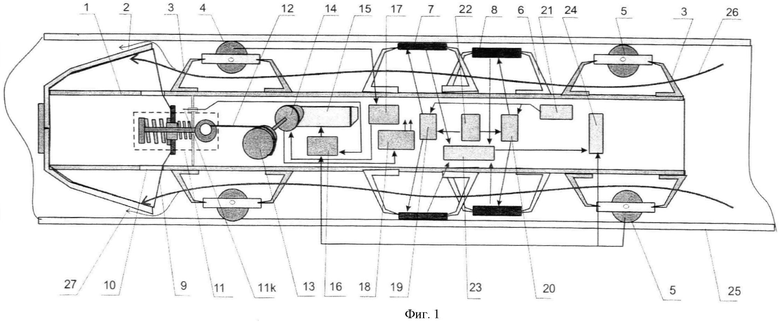
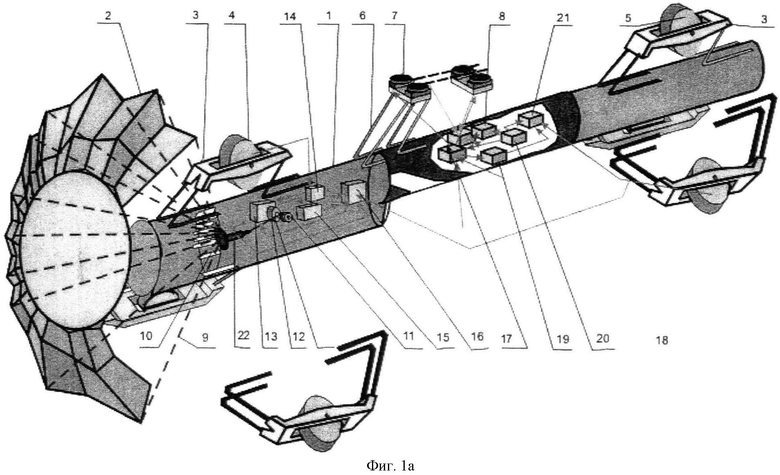
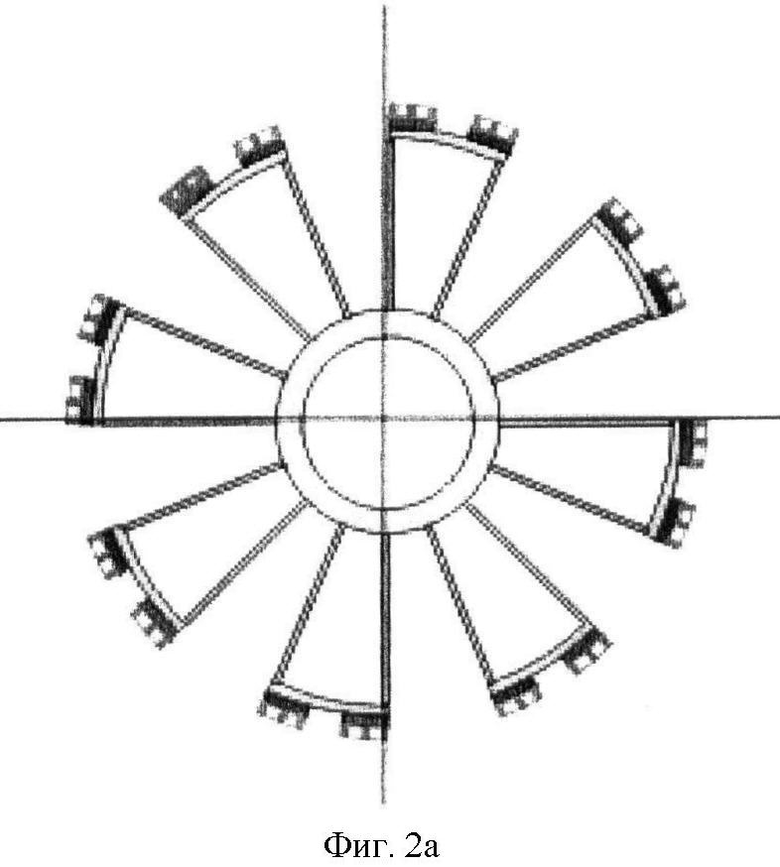
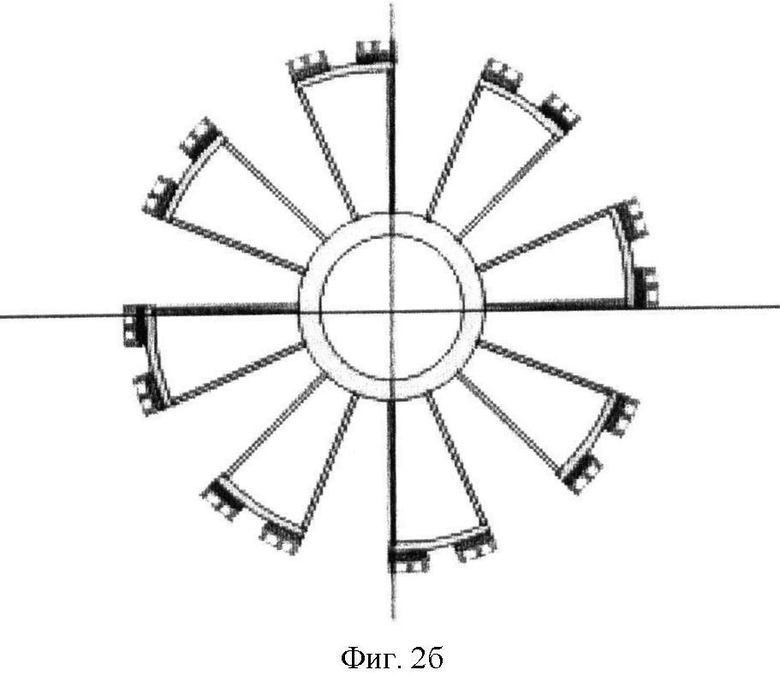
Состав и работа устройства для контроля стенок трубопроводов иллюстрируется рисунками. На Фиг.1 и Фиг.1а показана схема устройства для контроля стенок трубопроводов. На Фиг.2 показана схема расположения поисковых узлов, на Фиг.3 - возможная конструкция датчика усилия, на Фиг.4 - конструкция магнитно-вихретоковой поисковой системы.
Устройство для контроля стенок трубопроводов состоит из трубы-основания 1, тянущей манжеты 2 веерного типа группы 2n пружинных опор 3, группы n опорных колес 4 со встроенными низкооборотными генераторами переменного тока, группы n опорных колес 5 со встроенными одометрами, группы 2k магнитно-вихретоковых преобразователей 7 и 8, группы 2k пружинных держателей 6 магнитно-вихретоковых преобразователей, группы тросов-строп 9, датчика усилия 11, троса-тяги 12, барабана 13, электромагнитной муфты 14, мотор-редуктора 15, блока управления мотор-редуктором 16, выпрямителя 17, буферного аккумулятора электроэнергии 18, первого усилителя сигналов возбуждения 19, второго усилителя сигналов возбуждения 20, генератора сигналов возбуждения 21, блока управления 22, многоканального частотно-избирательного усилителя 23, регистратора данных 24. Диагностируемая труба обозначена позицией 25, газовый поток - 26. Устроено устройство для контроля стенок трубопроводов следующим образом.
На передней (головной) части трубы-основания 1 укреплена коническая манжета 2 веерного типа (Патент RU 2390769, МПК 8 G01N 27/82).
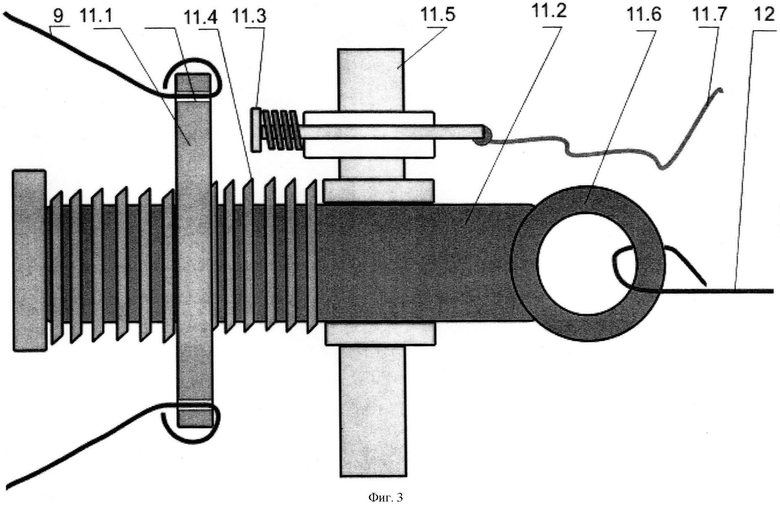
Манжета представляет собой два усеченных конуса, переходящих один в другой. Вершина манжеты плоская. От плоской вершины расходится и расширяется первая коническая гофрированная юбка, к краям которой присоединена вторая коническая гофрированная юбка. Гофры юбок расходятся вдоль юбки по ее длине. Начало ребра последней юбки является продолжением ребра первой юбки. В наружные ребра манжеты 2 армированы кевларовые или из другого прочного и износостойкого материала трос-стропы 9. Трос-стропы 9 через соответствующие щели 10 в теле трубы-основания 1 входят внутрь трубы-основания 1 и крепятся к краям диска, входящего в состав датчика усилия 11. Датчик усилия 11 расположен на центральной оси трубы-основания 1. Датчик усилия 11 может быть как релейно-контактным, так и пропорционального типа. Один из вариантов возможного исполнения датчика усилия показан на Фиг.3. Датчик усилия замыкает контакты при наличии определенной величины усилия между диском и его центральной тягой.
К находящемуся в задней части датчика усилия 11 кольцу крепится передним концом трос-тяга 12. Второй конец троса-тяги 12 крепится к наружной поверхности барабана 13. Барабан 13 расположен поперек трубы-основания 1, и его вал может вращаться в подшипниках. На внешнюю цилиндрическую поверхность барабана 13 может наматываться и сматываться с нее трос-тяга 12. Трос-тяга 12 может быть выполнен из кевлара. Вал барабана 13 соединен с выходным валом электромагнитной муфты 14, которая может соединять и разъединять кинематические связи между валом барабана 13 и выходным валом мотор-редуктора 15. Обмотка катушки электромагнитной муфты 14 используется в качестве электрического дросселя, сглаживающего пульсации выпрямленного переменного тока, поступающего от выпрямителя 17. Выпрямитель 17 выпрямляет переменный ток от генераторов переменного тока, встроенных в опорные колеса 4. Когда колеса не крутятся, муфта 14 обесточена и вал барабана 13 может свободно вращаться в подшипниках в любую сторону. Это позволяет манжете 9 силой упругости отжиматься к стенке трубы, уменьшая до минимума зазор между краями манжеты и стенкой трубы. Когда устройство для контроля стенок трубопроводов движется и колеса крутятся, генераторы в колесах 4 выдают электрический ток, который после выпрямления протекает по обмотке муфты 14. Муфта создает кинематическую связь между валом барабана 13 и выходным валом мотор-редуктора 15. В этом случае барабан может вращаться под действием крутящего момента от мотор-редуктора 15 и наматывать или сматывать со своей цилиндрической поверхности трос-тягу 12. Редуктор в мотор-редукторе 15 самостопорящийся, например червячного типа, и выдерживает без вращения силовые нагрузки от манжеты 2 в момент трогания устройства для контроля стенок трубопроводов. Выводы катушек мотор-редуктора 15 соединены с соответствующими выходами блока управления мотор-редуктором 15. Блок управления 16 мотор-редуктором оснащен устройством, хранящим уставку значения требуемой скорости движения устройства для контроля стенок трубопроводов. Блок 16 управления мотор-редуктором 15 выполняет функции блока управления скоростью движения устройства для контроля стенок трубопроводов. Установка требуемой скорости движения устройства для контроля стенок трубопроводов может быть осуществлена разными способами, как цифровым, так и аппаратно-аналоговым.
В аналоговом виде требуемое значение может быть задано в виде некоторого напряжения с помощью переменного резистора. В цифровом виде требуемое значение скорости может быть задано в виде цифрового кода, сохраняемого в регистре или в памяти бортового компьютера. Блок управления 16 мотор-редуктором 15 может быть выполнен в аналоговом или цифровом варианте что, соответственно, позволит ему принимать или аналоговые, или цифровые сигналы от одометров в колесах 5.
По направлению к хвостовой части устройства для контроля стенок трубопроводов позади тянущей манжеты 2 располагается группа П-образных опор 3, выполненных на пружинах кручения (Фиг.1а). Каждая опора 3 несет по одному колесу 4 со встроенным силовым генератором переменного тока. Выходная обмотка генератора соединена с выпрямителем 17. Число опор 3 и колес 4 выбирается из условия обеспечения удержания трубы-основания 1 с оборудованием на продольной оси контролируемой трубы 25. Для снижения аэродинамического сопротивления потоку газа 26, перетекающему вдоль корпуса устройства для контроля стенок трубопроводов, радиально ориентированные элементы конструкции опор 3 выполняются обтекаемой формы, например эллиптического сечения, или снабжаются специальными обтекателями.
В средней части полости трубы-основания 1 размещается аппаратура для возбуждения вихретоковых преобразователей, приема и обработки сигналов датчиков, а также регистратор сигналов аппаратуры неразрушающего контроля и сигналов датчиков текущих координат устройства для контроля стенок трубопроводов. Эти узлы: первый усилитель 19 сигналов возбуждения, второй усилитель сигналов возбуждения 20, генератор сигналов возбуждения 21, блок управления 22 работой вихретоковых преобразователей, многоканальный частотно-избирательный усилитель 23 с преобразователем выходных сигналов вихретоковых преобразователей, регистратор 24 данных и сигналов датчиков.
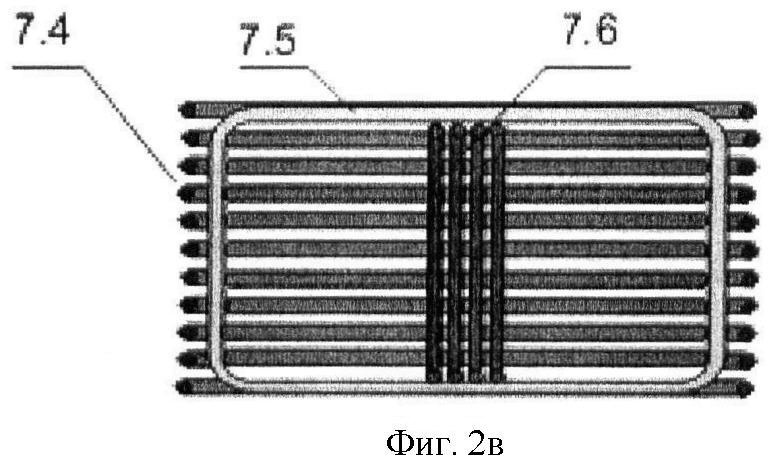
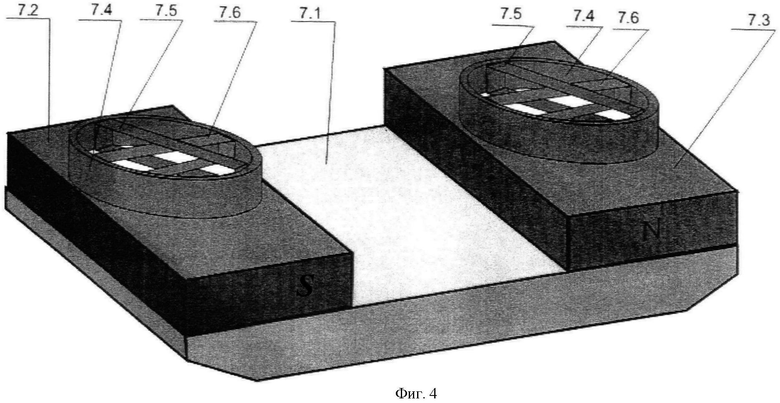
На внешней поверхности трубы-основания 1 в средней ее части расположена группа пружинных опор 6, несущих два пояса магнитно-вихретоковых поисковых узлов 7 и 8. Поисковый узел (Фиг.4) состоит из магнитной системы и вихретоковых датчиков. Магнитная система состоит из магнитомягкого магнитопровода 7.1, двух постоянных магнитов 7.2 и 7.3, образующих северный и южный полюса магнитной системы. Сенсорная часть состоит из трех катушек. Первая 7.4 катушка является катушкой возбуждения. Она выполнена в виде цилиндра, ось которого перпендикулярна стенке трубы. Вторая катушка 7.5 имеет прямоугольную форму и помещена внутри первой 7.4 так, чтобы ее ось была перпендикулярна оси первой катушки и была направлена параллельно продольной оси обследуемого трубопровода. Третья катушка 7.6 также прямоугольной формы. Она также помещена в полость первой 7.4 катушки так, чтобы ее ось была перпендикулярна оси первой катушки. Кроме того, третья катушка помещена внутрь второй 7.5 катушки так, чтобы ее ось была перпендикулярна оси второй катушки. При таком размещении вторая катушка 7.5 активно реагирует на продольные трещины, а третья катушка 7.6 активно реагирует на поперечные трещины. Кроме того, обе катушки 7.5 и 7.6 реагируют на дефекты потери металла. Магниты в зоне расположения катушек создают в стенке трубы поле, направленное перпендикулярно стенке трубы, и снижают магнитную проницаемость ее материала. Это позволяет увеличить глубину проникания вихревых токов в тело стенки трубы и с большей эффективностью выявлять дефекты и трещины на противоположной стороне стенки трубы. Пространство между полюсами намагничивающей системы не контролируется. Это слепая зона первого 7 поискового пояса. Для устранения слепых зон первого поискового пояса 7 введен второй поисковый пояс 8, выполненный аналогично поясу 7, но повернутый вокруг продольной оси трубы-основания 1 на некоторый угол так, чтобы зона контроля второго пояса 8 перекрывала слепые зоны первого поискового пояса 7.
Для обеспечения постоянного немагнитного зазора между полюсами поисковых блоков и стенкой трубы могут быть использованы антифрикционные опоры или роликовые опорные узлы (на рисунках не показаны). Для уменьшения истирания при случайных контактах с выступами на стенке трубы полюса магнитов оснащены накладками из магнитной нержавеющей стали, вязкость которой обеспечивает требуемую длительность эксплуатации накладки.
Опоры 6 выполнены в виде пружин кручения из шин эллиптического или круглого сечения. Это уменьшает аэродинамическое сопротивление опор потоку обтекающего их газа.
Катушки возбуждения 7 вихретоковых датчиков соединены с усилителем сигналов возбуждения 19, а катушки возбуждения 8 второй группы вихретоковых преобразователей соединены с усилителем сигналов возбуждения 20. Оба усилителя сигналов возбуждения 19 и 20 соединены своими входами с выходом генератора сигналов возбуждения 21. Сигнальные катушки 7.5 и 7.6 вихретоковых датчиков соединены с соответствующими входами многоканального частотно-избирательного усилителя-преобразователя 23, где высокочастотный сигнал с катушек преобразуется амплитудным или фазовым детектированием в низкочастотный информационный сигнал. Информационные сигналы от многоканального частотно-избирательного усилителя-преобразователя 23 подаются на соответствующие входы регистратора 24. В хвостовой части трубы-основания 1 размещены опоры 3 с колесами 5, выполняющими функции одометрической системы измерения скорости и пройденного пути. Сигналы одометров поступают в регистратор 24 и в блок управления мотор-редуктором 16 для управления скоростью движения устройства для контроля стенок трубопроводов.
В устройстве для контроля стенок трубопроводов используется вихретоковый преобразователь (ВТП) с подмагничиванием стенки трубы для увеличения глубины проникновения вихревых токов в стенку трубы. При этом частота вихревого тока снижена, что требует замедления скорости перемещения устройства для контроля стенок трубопроводов. ВТП с подмагничиванием имеет то преимущество, что с применением фазового детектирования позволяет отличать дефекты на внутренней поверхности стенки трубы от дефектов, расположенных на наружной стенке трубы, в отличие от MFL магнитного дефектоскопа, требующего установки дополнительных датчиков для отличения внутренних дефектов от наружных.
Работает устройство для контроля стенок трубопроводов следующим образом (на примере обследования газопровода). Устройство для контроля стенок трубопроводов вводится в камеру запуска поршней и проталкивается в линейный участок трубы 25, сопрягающей камеру с отсечным краном. Колеса 4 и 5 упругими силами опор 3 прижимаются к стенке трубы 25. Гофрированная манжета 2 деформируется отгибанием наружных краев к цилиндру трубы-основания 1 устройства для контроля стенок трубопроводов. При этом ослабевает натяжение строп-тросов 9. Шток 11.2 датчика усилия 11 и закрепленный на штоке 11.2 диск 11.1 отжимаются пружиной 11.4 вперед (Фиг.3) относительно держателя-центратора 11.5, закрепленного на стенке трубы-основания 1. На центраторе 11.5 закреплен изолированный контакт 11.3. От контакта 11.3 начинает отодвигаться диск 11.8, имеющий электрический контакт с корпусом (с общим проводом электрической части аппарата). В некоторый момент разрывается электрическая цепь между контактом 11.3 и диском 11.8. Сигнал о пропадании контакта по проводу 11.7 подается на соответствующий вход блока управления 16 мотор-редуктором. Газ 26 давит на манжету 2, и устройство для контроля стенок трубопроводов под действием перепада давления газа 26 на манжете 2 (Фиг.1) начинает движение в трубе. Колеса 4 и 5 приходят в движение. Генераторы электрического тока в колесах 4 выдают переменный ток, который подается на входы выпрямителя 17. Выпрямленный ток от выпрямителя 17 проходит по обмоткам электромагнитной муфты 14, и пульсации тока сглаживаются индуктивностью катушек электромагнитной муфты 14. Магнитное поле, создаваемое катушками электромагнитной муфты 14 при протекании по ним тока, заставляет электромагнитную муфту 14 срабатывать. При этом выходной вал электромагнитной муфты 14 приходит в сцепление с ее входным валом. В блок управления 16 мотор-редуктором поступает сигнал о наличии движения от установленных в колесах 5 датчиков одометров. Сигнал о размыкании контактов датчика усилия 11 вместе с сигналом о наличии движения приводят к включению мотор-редуктора 15. Вращение вала мотор-редуктора 15 передается через электромагнитную муфту 14 на барабан 13. Вращение барабана приводит к наматыванию на его цилиндрическую поверхность троса-тяги 12. Трос-тяга 12 тянет кольцо 11.6 и шток 11.2 (Фиг.3) датчика усилия 11. Когда усилие со стороны троса-тяги 12 превысит силу упругости пружины 11.4, шток 11.2 начнет перемещаться в сторону задней части устройства для контроля стенок трубопроводов и будет тянуть за собой трос-стропы 9, натягивая их. Длина трос-стропов 9 выбирается такой, чтобы они оказались в натянутом состоянии в тот момент, когда в датчике усилия контакт 11.3 замкнется на диск 11.1. Сигнал замыкания контактов датчика усилия 11 поступает в блок управления 16 мотор-редуктором, и мотор-редуктор 15 останавливается. Самостопорящийся редуктор мотор-редуктора 15 натянутыми строп-тросами удерживает манжету 2 в том состоянии, при котором началось движение устройства для контроля стенок трубопроводов. В момент трогания скорость движения устройства для контроля стенок трубопроводов начинает увеличиваться. При этом увеличивается соответствующее скорости движения напряжение от датчиков одометра. Когда величина сигнала от одометра на входе блока управления 16 мотор-редуктором превысит заданную установкой величину, блок управления 16 мотор-редуктором начнет выдавать на мотор-редуктор 15 силовой сигнал, вызывающий вращение вала мотор-редуктора 15 в ту сторону, при которой барабан 13 наматывает трос-тягу 12. При этом трос-тяга 12 тянет шток 11.2 и вместе с ним диск 11.1 с прикрепленными к нему трос-стропами 9. Края гофрированной манжеты 9 отжимаются трос-стропами 9 от стенки трубы 25, благодаря чему увеличивается сечения канала между стенкой трубы 25 и краями гофрированной манжеты 9. Это приводит к увеличению объема газа, перетекающего по открывшемуся байпасному каналу между манжетой 9 и стенкой трубы 25 и к уменьшению перепада давления на гофрированной манжете 9. Снижение перепада давления на манжете 9 приводит к уменьшению величины усилия, толкающего устройство для контроля стенок трубопроводов и к понижению скорости его движения. Когда скорость движения устройства для контроля стенок трубопроводов окажется ниже заданного усилия, напряжение с датчиков одометра станет ниже значения напряжения, определяемого уставкой, и рассогласование напряжений сменит знак. Блок управления 16 мотор-редуктором начнет выдавать на мотор-редуктор напряжение противоположной полярности, и направление вращения вала мотор-редуктора 15 изменится. При этом барабан 13 будет уже вращаться в противоположную сторону. Трос-тяга 12 будет сматываться с барабана 13, и под действием перепада давления газа гофрированная манжета 9 начнет деформироваться: ее края начнут прижиматься к стенке трубы 25, что вызовет уменьшение сечения байпасного канала и увеличение перепада давления на гофрированной манжете 9 и, соответственно, приведет к повышению скорости движения устройства для контроля стенок трубопроводов.
Если произойдет отказ генераторов напряжения в колесах 4, то прекратится протекание электрического тока по катушкам электромагнитной муфты 13, в результате чего разорвется кинематическая связь между валом мотор-редуктора 15 и валом барабана 13. В результате этого окажется возможным разматывание трос-тяги 12 с наружной поверхности барабана 13. Трос-тяга 12 начнет сматываться с барабана 13 под действием силы давления газа 26 на гофрированную манжету 9, передаваемой через трос-стропы 9 и шток 11.2 датчика усилия 11. Когда края гофрированной манжеты 9 прижмутся давлением газа 26 к стенке трубы 25 и перекроют путь перетеканию газа вокруг корпуса устройства для контроля стенок трубопроводов. К гофрированной манжете 9 в этом случае будет приложен максимальный перепад давления, и устройство для контроля стенок трубопроводов с отказавшим генератором электрического тока будет двигаться в сторону приемной камеры с максимальной возможной скоростью. Этим достигается самоэвакуация от места остановки до приемной камеры отказавшего устройства в трубопроводе.
Система неразрушающего контроля стенок труб работает таким образом. Контейнеры с поисковыми узлами 7 и 8 прижимаются пружинными опорами 6 к стенке контролируемой трубы 25. Намагничивающая система содержит магниты 7.2 - северный полюс, 7.3 - южный полюс, укрепленные на магнитопроводе 7.1. Магнитное поле проникает в стенку трубы 25 и намагничивает ее.
В магнитном поле каждого полюса намагничивающей системы (Фиг.4) размещена катушка возбуждения 7.4, внутри которой размещена первая сигнальная катушка 7.5. Внутри первой сигнальной катушки 7.5 размещена вторая сигнальная катушка 7.6. Оси катушек взаимно перпендикулярны и перпендикулярны оси катушки возбуждения 7.4. Относительно продольной оси контролируемой трубы 25 сигнальные катушки могут быть ориентированы под любым углом, например ось катушки 7.5 может быть параллельна продольной оси трубы 25, а ось катушки 7.6 - перпендикулярна продольной оси трубы 25. Такое размещение сигнальных катушек позволит выявлять как поперечные, так и продольные трещины в стенке контролируемой трубы. В катушку возбуждения 7.4 подается переменный ток, создающий в катушке возбуждения 7.4 переменное магнитное поле, концентрация которого максимальна внутри катушки возбуждения. Переменное магнитное поле, созданное катушкой возбуждения 7.4, проникает в стальную стенку трубы 25. Глубина проникновения поля зависит от магнитной проницаемости материала трубы, ее проводимости и частоты изменений магнитного поля. Для уменьшения магнитной проницаемости материала стенки трубы 25 производится ее намагничивание постоянным магнитным полем. Для увеличения глубины проникновения вихревых токов в стенку трубы 25 используется низкая частота тока возбуждения. В [1] указывается, что низкочастотный вихретоковый дефектоскоп с подмагничиванием контролируемого изделия обеспечивает возможность контроля стенок 35 мм при тех же условиях намагничивания, что созданы в MFL дефектоскопе, контролирующем трубы со стенкой толщиной 10-15 мм.
Сигнальные катушки 7.5 и 7.6 преобразуют результирующее магнитное поле, порождаемое в контролируемом изделии вихревыми токами, в электрический ток. Из теории, описывающей работу вихретокового преобразователя [Неразрушающий контроль и диагностика: Справочник / В.В.Клюев, Ф.Р.Соснин, В.Н.Филимонов и др.; Под ред. В.В.Клюева. - М.: Машиностроение, 1995. - 488 с., ил.], известно, что диагностическая информация при вихретоковом контроле может быть выявлена как амплитудным, так и фазовым детектором. Токи с выводов сигнальных катушек усиливаются соответствующими усилителями 23, частотные характеристики которых обеспечивают максимальное усиление сигналов на выбранной рабочей частоте катушек возбуждения. В выходных каскадах этих усилителей 23 предусмотрено амплитудное или фазовое детектирование сигналов для выявления признаков наличия дефектов в контролируемой стенке трубы. Продетектированные сигналы с выходов усилителей поступают на соответствующие входы регистратора 24 данных. Для привязки дефектного места к конкретному участку трубопровода на соответствующий вход регистратора поступают сигналы одометров. Записанная информация после извлечения устройства для контроля стенок трубопроводов из трубопровода перегружается из регистратора 24 в персональный компьютер, где подвергается анализу и интерпретации в соответствии с принятой конкретным предприятием методикой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДА | 2009 |
|
RU2390769C1 |
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПРОХОЖДЕНИЯ ДЕФЕКТОСКОПОМ РАВНОПРОХОДНЫХ ТРОЙНИКОВ БЕЗ ОСТАНОВОК | 2006 |
|
RU2324170C1 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| РЕГУЛЯТОР СКОРОСТИ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2013 |
|
RU2533754C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| КОМПЛЕКС ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ С ТРОСОВОЙ ПРОТЯЖКОЙ | 2015 |
|
RU2586258C1 |
| ВНУТРИТРУБНЫЙ ПРОФИЛОМЕТР | 2014 |
|
RU2572221C1 |
Устройство для контроля стенок трубопроводов с вихретоковыми датчиками, помещенными в магнитный зазор, образованный между соответствующими полюсами постоянных магнитов и стенкой контролируемой трубы с питанием катушек возбуждения вихретоковых датчиков переменным током низкой частоты и с использованием двух или более сигнальных катушек, помещенных внутри катушки возбуждения так, чтобы оси сигнальных катушек были перпендикулярны оси сигнальной катушки. Ввиду низкочастотности датчиковой системы скорость движения дефектоскопа регулируется байпасной системой с перепуском газа снаружи дефектоскопа при использовании легко деформируемой ребристой манжеты веерного типа в качестве регулятора сечения канала для перепуска газа. Деформация манжеты производится прижатием ее ребер к корпусу дефектоскопа с помощью электропривода. На случай отказа источников питания и обеспечения самопроизвольного движения устройства для контроля стенок трубопроводов от места отказа к приемной камере применена электромагнитная муфта, обмотка которой питается током генераторов, встроенных в опорные колеса. Сигналы вихретоковых датчиков детектируются амплитудными или фазовыми детекторами и регистрируются бортовым регистратором совместно с сигналами датчиков координат. Изобретение обеспечивает улучшение эксплуатационных характеристик за счет повышенной способности к прохождению сужений внутри трубопровода и сохранение оптимальной скорости перемещения в широком диапазоне скоростей транспортирования газа и возможности выявления разноориентированных трещин с использованием всего одной намагничивающей системы. 4 ил.
Устройство для контроля стенок трубопроводов, состоящее из цилиндрического несущего корпуса, эластичных манжет, герметичного контейнера, намагничивающей системы в виде группы магнитных блоков, датчиков дефектов, аппаратуры возбуждения преобразователей и приема сигналов преобразователей, регистрирующей аппаратуры, устройств измерения пути, источников электропитания, отличающееся тем, что в него введены несколько опорно-несущих колес со встроенными электромеханическими генераторами электроэнергии, несколько опорно-несущих колес со встроенными одометрическими датчиками, группа строп-тросов, тяга с датчиком усилия, трос-тяга, барабан, электромагнитная муфта, мотор-редуктор, блок управления скоростью мотор-редуктора, а датчики дефектов выполнены в виде вихретоковых датчиков, причем цилиндрическое основание устройства для контроля стенок трубопроводов выполнено в виде трубы-основания, в головной части которой укреплена своим центром манжета веерного типа с числом ребер - n, края которой соединены с первыми концами n - строп-тросов, вторые концы которых введены в соответствующий из n - пропилов в стенке трубы-основания и соединены с тягой в передней ее части, а к задней части тяги присоединена первым концом гибкая трос-тяга, задняя часть которой прикреплена к барабану, вал которого соединен с выходным валом электромагнитной муфты, входной вал которой соединен с валом мотор-редуктора, обмотки управления которого соединены с выходными клеммами блока управления скоростью мотор-редуктора, входные клеммы которого соединены с соответствующими выводами колесных одометров, оси которых закреплены на свободных концах соответствующих упругих опор, закрепленных в хвостовой части трубы-основания, в средней части которой закреплен два ряда пружинных опор с размещенными на их верхней части постоянными магнитами и вихретоковыми датчиками, установленными в зазоре между магнитным полюсом и стенкой трубы, причем второй ряд опор смещен по окружности цилиндра относительно первого так, чтобы обеспечить сплошное перекрытие зоной контроля датчиков всей внутренней поверхности трубы, при этом катушки возбуждения вихретоковых датчиков выполнены в виде цилиндрических катушек, а первая сигнальная катушка и вторая сигнальная катушка имеют прямоугольную форму, и вторая сигнальная катушка вставлена узкой стороной в первую сигнальную катушку под прямым углом так, что получившаяся фигура имеет форму креста и обе катушки вставлены внутрь катушки возбуждения так, чтобы оси сигнальных катушек были перпендикулярны оси катушки возбуждения, причем первая сигнальная катушка ориентирована вдоль направления движения устройства для контроля стенок трубопроводов, а вторая сигнальная катушка ориентирована поперек направления движения устройства для контроля стенок трубопроводов, и катушки возбуждения соединены с соответствующим усилителем сигналов возбуждения, а выводы сигнальных катушек соединены с соответствующими входами многоканального приемника сигналов, выходы которого соединены с соответствующими входами регистратора сигналов, к соответствующим входам которого присоединены выходы соответствующих одометров, причем выходы встроенных в опорные колеса генераторов переменного тока соединены с соответствующими выпрямителями, выходы которых соединены с первыми выводами обмоток катушек электромагнитной муфты, вторые выводы которых соединены с соответствующими выводами буферного аккумулятора, а электрический вывод датчика усилия соединен с соответствующим входом блока управления мотор-редуктором, причем редуктор мотор-редуктора выполнен самостопорящимся.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДА | 2009 |
|
RU2390769C1 |
| МАГНИТНЫЙ ЛОКАТОР ДЕФЕКТОВ И ПОВРЕЖДЕНИЙ ТРУБ | 2005 |
|
RU2328731C2 |
| RU 2003126841 А, 20.02.2005 | |||
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОГО КОНТРОЛЯ ТРУБОПРОВОДОВ С ДИНАМИЧЕСКИМ РЕЖИМОМ СКАНИРОВАНИЯ | 2002 |
|
RU2201590C1 |
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 1999 |
|
RU2172488C1 |
| Прибор для определения выхода из бревна пиломатериалов | 1928 |
|
SU12734A1 |
| Устройство для получения звука | 1928 |
|
SU11608A1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| SU 038124 А, 23.06.1982 | |||
| Вяжущее | 1984 |
|
SU1206246A1 |

