Изобретение относится к радиолокации и может быть использовано для распознавания воздушных объектов (ВО) в "просветных" [1] радиолокационных станциях (РЛС) наземно-космического базирования (НКБ).
Известны устройства, решающие задачу распознавания объектов по радиолокационным сигналам [2, 3], однако они требуют значительных временных затрат, что не позволяет использовать их при работе РЛС в режиме реального времени.
Наиболее близким по своей технической сущности и техническому исполнению является устройство распознавания [4], используемое в "просветной" РЛС наземного базирования и принятое за прототип. Это устройство содержит блок обработки радиолокационной информации, формирователь доплеровских портретов (ДП), классификаторы первого и второго уровней и блок эталонных ДП. В основе работы устройства-прототипа лежит сопоставление информации о распознаваемом ВО с априорной информацией о классах ВО. В качестве такой информации используется огибающая доплеровского спектра сигнала, из которой формируется ДП ВО.
Недостатком прототипа является сравнительно небольшое количество распознаваемых классов ВО (ракета, вертолет, истребитель, транспортный самолет) при низкой вероятности правильного распознавания (0,43-0,74).
При работе "просветной" РЛС НКБ возникает задача распознавания большего числа классов ВО, таких как ракета, вертолет, истребитель, транспортный самолет, баллистическая ракета, части баллистической ракеты.
Техническим результатом заявляемого изобретения является увеличение количества распознаваемых классов ВО при повышении вероятности правильного распознавания.
Поставленная цель достигается тем, что в устройство-прототип, содержащее блок обработки радиолокационной информации, формирователь ДП, классификаторы первого и второго уровней и блок эталонных ДП, введены вычислитель вертикальной составляющей скорости объекта, вычислитель его трассовой скорости и параметрический классификатор с соответствующими связями.
На чертеже представлена структурная схема предлагаемого устройства со следующими обозначениями:
1 - блок обработки радиолокационной информации (БО);
2 - формирователь доплеровских портретов (ФДП);
3 - классификатор первого уровня (КПУ);
4 - классификатор второго уровня (КВУ);
5 - блок эталонных доплеровских портретов (ЭДП);
6 - вычислитель вертикальной составляющей скорости (ВСС);
7 - вычислитель трассовой скорости (ВТС);
8 - параметрический классификатор (ПК).
Предлагаемое устройство состоит из последовательно соединенных блока обработки радиолокационной информации БО 1, формирователя доплеровских портретов ФДП 2, классификаторов первого и второго уровней КПУ 3 и КВУ 4, а также блока эталонных доплеровских портретов ЭДП 5 и последовательно соединенных вычислителя вертикальной оставляющей скорости ВСС 6, вычислителя трассовой скорости ВТС 7 и параметрического классификатора ПК 8, причем второй выход БО 1 соединен со входом вычислителя ВСС 6 и вторым входом ПК 8, третий выход БО 1 - со вторым входом ВТС 7, выход блока ЭДП 5 - со вторым входом КПУ 3, три выхода которого соединены с тремя входами КВУ 4, четвертый вход которого соединен с выходом ПК 8, а выход является выходом устройства.
Предлагаемое устройство работает следующим образом.
При обработке сигнала, полученного с приемника РЛС, БО 1 измеряет частоту Доплера и амплитуду сигнала, а также скорость ВО по координатам х и у (Vx, Vy) и его высоту Н.
На основании данных, полученных с БО 1 (частота Доплера и амплитуда сигнала), ФДП 2 формирует доплеровский портрет ВО, в котором с шагом по частоте 1 Гц определяется амплитуда ДП в заданном диапазоне частот.
Информация о ДП ВО поступает на первый вход КПУ 3, а на его второй вход поступает информация с блока ЭДП 5 об эталонных ДП. В КПУ 3 имеются 3 непараметрических классификатора, каждый из которых, сравнивая поступающую информацию, использует свой признак распознавания. В качестве признаков выбраны коэффициент взаимной корреляции между ДП ВО и эталонными ДП, геометрическая близость между ними и среднее значение нормированной амплитуды ДП ВО в заданном частотном диапазоне.
Данные по высоте ВО со второго выхода БО 1 поступают на вход вычислителя ВСС 6 и второй вход ПК 8.
Вычислитель ВСС 6 по формуле
определяет значение вертикальной составляющей скорости VHi, которое подается на первый вход ВТС 7, на второй вход которого с третьего выхода БО 1 поступают значения горизонтальных составляющих скоростей Vx, Vy.
В ВТС 7 вычисляется значение трассовой скорости ВО по формуле

которое подается на первый вход ПК 8.
По значениям высоты Н и трассовой скорости VTi ПК 8 осуществляет предварительную параметрическую классификацию ВО по априорно известным параметрам движения распознаваемых объектов.
Результаты, полученные в КПУ 3 и ПК 8, поступают на КВУ 4, где применяется корректор по большинству, использующий алгоритм голосования [5], после чего принимается решение о принадлежности ВО к определенному классу.
Как показали модельные эксперименты, вероятность распознавания шести различных классов ВО в предложенном устройстве составила 0,84-0,9 при соотношении уровней сигнала к шуму не менее 30 дБ. При этом для различных классов ВО были приняты ограничения [5] по высоте Н и трассовой скорости VТ, указанные в таблице 1.
Таким образом, введение в прототип вычислителя ВСС 6, ВТС 7 и ПК 8 с соответствующими связями позволило учесть высоту и трассовую скорость ВО, что привело к увеличению количества распознаваемых классов ВО при повышении вероятности правильного распознавания.
Источники информации
1. Бляхман А.Б., Рунова И.А. Радиотехника и электроника, 2001, т.46, №4, с.424.
2. Матюгин С.Н., Односевцев В.А. Распознавание радиотелеграфных сигналов КВ-диапазона. Труды XX Всероссийской конференции по распространению радиоволн. Н.Новгород, 2-4 июля 2002, изд-во ТАЛАМ, Н.Новгород, 2002, с.169.
3. Саблин В.Н., Чапурский В.В., Шейко А.П. Нейросетевое распознавание спектральных портретов воздушных объектов при наблюдении методом теневого инверсного радиолокационного синтезирования апертуры. Радиотехника и электроника, 2004, том 49, №2, с.184-195.
4. Бляхман А.Б., Матюгин С.Н. Распознавание воздушных объектов при радиолокации на просвет. Радиотехника и электроника, 2001, том 46, №11, с.1356-1360.
5. Ширман А.Д., Горшков С.А., Лещенко С.П. и др. Методы радиолокационного распознавания и их моделирование. Зарубежная радиоэлектроника, 1996, №11, с.3-63.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания радиолокационных объектов | 2017 |
|
RU2667516C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2570111C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2005 |
|
RU2324202C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2011 |
|
RU2453863C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ В ДВУХДИАПАЗОННЫХ РАДИОЛОКАЦИОННЫХ КОМПЛЕКСАХ С АКТИВНЫМИ ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ (АФАР) | 2016 |
|
RU2665032C2 |
| Способ определения поперечных размеров цели по данным двух разнесенных позиций в многопозиционных РЛС с учетом их поляризационно-рассеивающих свойств | 2019 |
|
RU2708072C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
Изобретение относится к радиолокации и может быть использовано для распознавания воздушных объектов (ВО) в "просветных" РЛС наземно-космического базирования. Достигаемым техническим результатом заявляемого изобретения является увеличение количества распознаваемых классов ВО при повышении вероятности правильного распознавания. Поставленная цель достигается за счет того, что в известное устройство, содержащее блок обработки радиолокационной информации БО 1, формирователь доплеровских портретов ФДП 2, классификаторы первого и второго уровней КПУ 3 и КГТУ 4 и блок эталонных доплеровских портретов ЭДП 5, введены вычислитель вертикальной составляющей скорости ВСС 6, вычислитель трассовой скорости ВТС 7 и параметрический классификатор ПК 8 с соответствующими связями. 1 ил., 1 табл.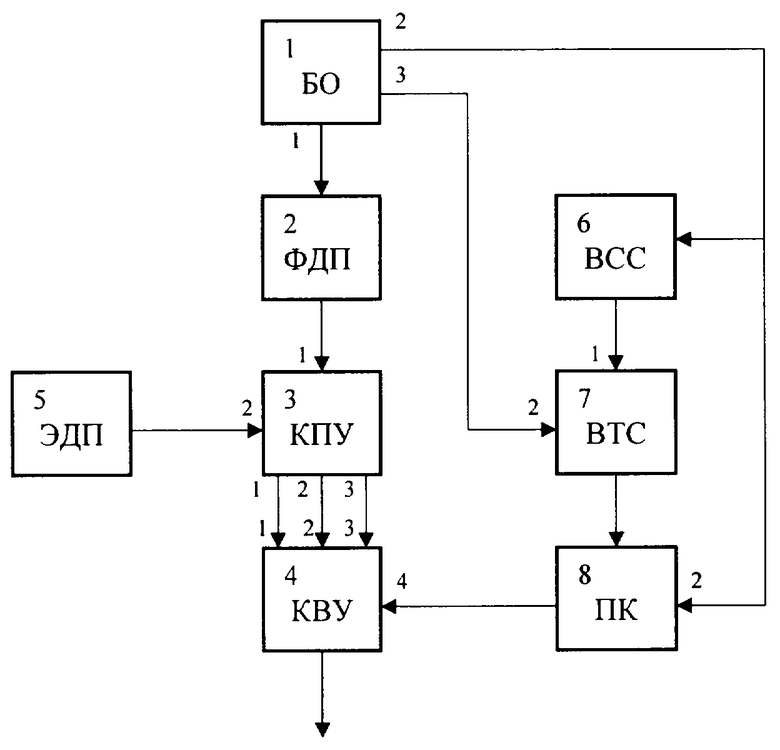
Устройство радиолокационного распознавания воздушных объектов (ВО), состоящее из последовательно соединенных блока обработки радиолокационной информации (РЛИ), полученной с приемника радиолокационной станции, формирователя доплеровских портретов (ДП) распознаваемых ВО, классификатора первого уровня и классификатора второго уровня, а также из блока эталонных ДП, выход которого соединен с вторым входом классификатора первого уровня, три выхода которого в соответствии с распознаваемыми признаками ВО соединены с соответствующими тремя входами классификатора второго уровня, выход которого является выходом устройства, при этом блок обработки РЛИ предназначен для измерения частоты Доплера и амплитуды сигнала для формирователя ДП, а также для измерения скорости и высоты распознаваемых ВО, классификатор первого уровня предназначен для сравнения получаемой информации в соответствии с признаками распознавания - коэффициентом взаимной корреляции между сформированными и эталонными ДП ВО, геометрической близости между ними, средним значением нормированной амплитуды ДП ВО в заданном частотном диапазоне, классификатор второго уровня предназначен для коррекции полученной информации по большинству признаков распознаваемых ВО и принятия решения о принадлежности ВО к определенному классу, отличающееся тем, что введены последовательно соединенные вычислитель вертикальной составляющей скорости ВО, вычислитель трассовой скорости ВО и параметрический классификатор, предназначенный для предварительной классификации ВО по априорно известным параметрам движения распознаваемых ВО, выход которого соединен с четвертым входом классификатора второго уровня, второй выход блока обработки РЛИ, являющийся выходом данных о высоте ВО, соединен с входом вычислителя вертикальной составляющей скорости ВО и вторым входом параметрического классификатора, третий выход блока обработки РЛИ, являющийся выходом значений горизонтальных составляющих скоростей ВО, соединен с вторым входом вычислителя трассовой скорости ВО.
| БЛЯХМАН А.Б., МАТЮГИН С.Н | |||
| Распознавание воздушных объектов при радиолокации на просвет | |||
| Радиотехника и электроника, 2001, т.46, №11, с.1356-1360 | |||
| RU 2003101831 А, 20.08.2004 | |||
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| ДОПЛЕРОВСКОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ТУРБОВИНТОВЫХ САМОЛЕТОВ | 1992 |
|
RU2020516C1 |
| US 5689268 А, 18.11.1997 | |||
| US 5223839 A, 29.06.1993 | |||
| DE 69831514D, 13.10.2005. | |||

