Изобретение относится к радиолокации и может быть использовано для распознавания воздушных объектов (ВО) в "просветных" радиолокационных станциях (РЛС) [1].
Известны устройства, решающие задачу распознавания объектов по радиолокационным эхо-сигналам [2, 3]. Эти устройства требуют значительных временных затрат, что не позволяет использовать их при работе в реальном времени.
Устройство распознавания [4] не может быть использовано на РЛС, не измеряющей высоту ВО, что сильно ограничивает область его применения.
Наиболее близким по своей технической сущности и техническому исполнению является устройство распознавания [5], используемое в «просветной» РЛС и принятое за прототип. Это устройство содержит блок обработки радиолокационной информации, формирователь доплеровских портретов (ДП), классификаторы первого и второго уровней, вычислитель модуля трассовой скорости, пороговое устройство и формирователь эталонных данных. В основе работы устройства-прототипа лежит сопоставление информации о распознаваемом ВО с априорной информацией о классах ВО. В качестве такой информации используются огибающая доплеровского спектра сигнала, из которой формируется ДП ВО, а также трассовая скорость ВО.
Недостатком прототипа является низкая вероятность правильного распознавания классов ВО «вертолет» и «легкомоторный самолет» (0,72-0,8). Высокая вероятность перепутывания этих классов вызвана схожестью их трассовых скоростей, а также близостью их теневых профилей и, как следствие, доплеровских портретов.
Техническим результатом заявляемого изобретения является повышение вероятности правильного распознавания классов ВО «вертолет» и «легкомоторный самолет».
Поставленная цель достигается тем, что в известное устройство-прототип, содержащее блок обработки радиолокационной информации, формирователь доплеровских портретов, классификаторы первого и второго уровней, вычислитель модуля трассовой скорости, пороговое устройство и формирователь эталонных данных, введены блок выделения спектральных составляющих вращающихся элементов и классификатор спектральных составляющих вращающихся элементов с соответствующими связями.
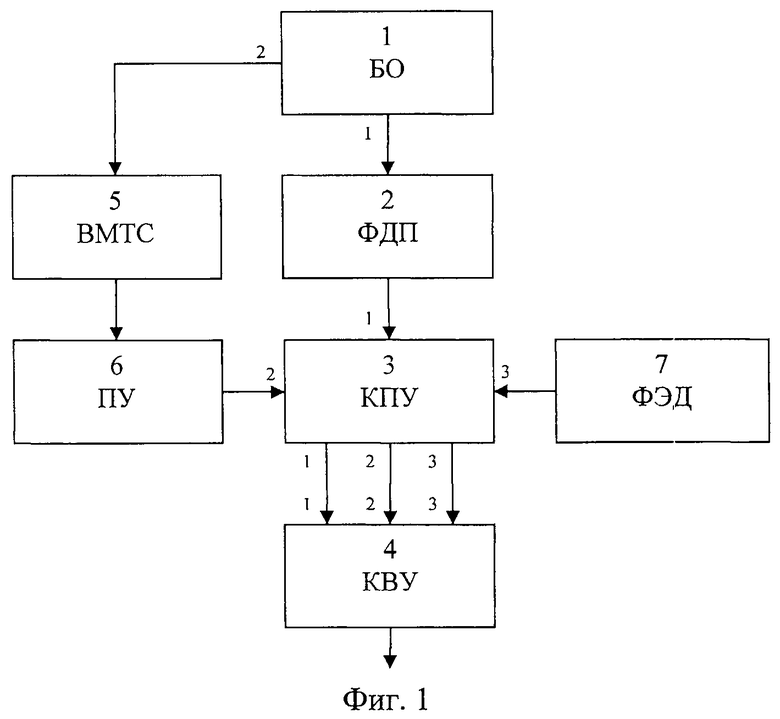
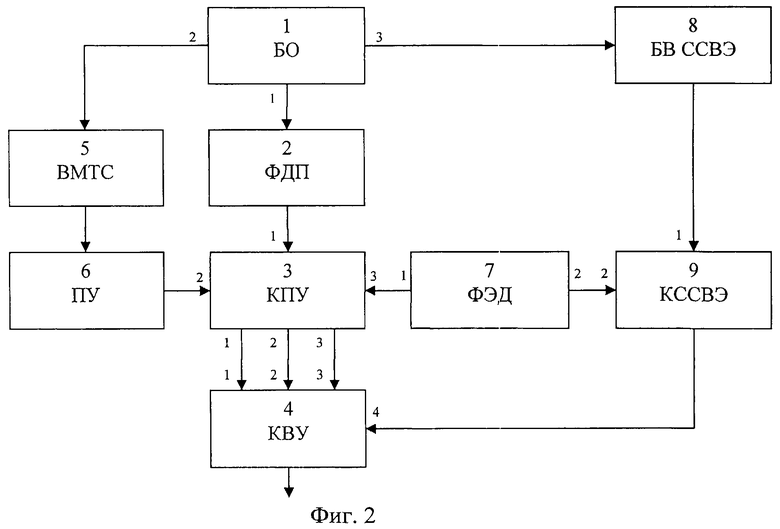
На фигурах 1 и 2 представлены структурные схемы соответственно прототипа и предлагаемого устройства со следующими обозначениями:
1 - блок обработки радиолокационной информации (БО);
2 - формирователь доплеровских портретов (ФДП);
3 - классификатор первого уровня (КПУ);
4 - классификатор второго уровня (КВУ);
5 - вычислитель модуля трассовой скорости (ВМТС);
6 - пороговое устройство (ПУ);
7 - формирователь эталонных данных (ФЭД);
8 - блок выделения спектральных составляющих вращающихся элементов (БВ ССВЭ);
9 - классификатор спектральных составляющих вращающихся элементов (КССВЭ).
Предлагаемое устройство состоит из последовательно соединенных блока обработки радиолокационной информации БО 1, формирователя доплеровских портретов ФДП 2, классификатора первого уровня и классификатора второго уровня КПУ 3 и КВУ 4, а также вычислителя модуля трассовой скорости ВМТС 5, порогового устройства ПУ 6, формирователя эталонных данных ФЭД 7, блока выделения спектральных составляющих вращающихся элементов БВ ССВЭ 8 и классификатора спектральных составляющих вращающихся элементов КССВЭ 9, причем второй выход БО 1 через ВМТС 5 и ПУ 6 соединен со вторым входом КПУ 3, третий выход БО 1 через БВ ССВЭ 8 соединен с первым входом КССВЭ 9, первый выход ФЭД 7 - с третьим входом КПУ 3, три выхода которого соединены с тремя входами КВУ 4, второй выход ФЭД 7 соединен со вторым входом КССВЭ 9, выход которого соединен с четвертым входом КВУ 4, а выход КВУ 4 является выходом устройства.
Предлагаемое устройство работает следующим образом.
При обработке сигнала, полученного с приемника РЛС, БО 1 измеряет частоту Доплера и амплитуду сигнала, азимут ВО, его координаты и компоненты скорости (Vx и Vу), а также проводит обработку сигнала (фильтрацию помех и сигналов от других ВО).
На основании данных, полученных с БО 1 (частота Доплера и амплитуда сигнала), ФДП 2 формирует доплеровский портрет ВО, в котором с шагом по частоте 1 Гц определяется амплитуда ДП в заданном диапазоне частот.
Информация о ДП ВО поступает на первый вход КПУ 3. На второй вход КПУ 3 поступает информация о трассовой скорости ВО, которая вычисляется в ВМТС 5 на основании данных о скоростях Vx и Vy, полученных с выхода БО 1, по формуле:
Пороговое значение VT, соответствующее различным классам ВО, определяется в ПУ 6 по заданной вероятности ложных тревог с использованием критерия Неймана - Пирсона [6].
На третий вход КПУ 3 с ФЭД 7 поступает информация об эталонных ДП. В КПУ 3 имеются 3 непараметрических классификатора, каждый из которых, сравнивая поступающую информацию, использует свой признак распознавания. В качестве признаков выбраны коэффициент взаимной корреляции между ДП ВО и эталонными ДП, геометрическая близость между ними и среднее значение нормированной амплитуды ДП ВО в заданном частотном диапазоне. Также в КПУ 3 используется полученная в ВМТС 5 информация о трассовой скорости ВО, благодаря чему исключается неопределенность классификации по трассовой скорости.
Обработанный радиолокационный сигнал с третьего выхода БО 1 поступает на вход БВ ССВЭ 8, где происходит выделение спектральных составляющих, возникающих из-за наличия на ВО вращающихся элементов конструкции, измерение их частот и амплитуд и формирование доплеровских портретов ССВЭ (ДП ССВЭ), в которых с заданным шагом по частоте определяется амплитуда ДП ССВЭ в заданном диапазоне частот. Эта информация поступает на первый вход КССВЭ 9.
КССВЭ 9 осуществляет классификацию ВО, сравнивая ДП ССВЭ с эталонной информацией, поступающей из ФЭД 7 на второй вход КССВЭ 9. При этом эталонными являются только классы ВО «вертолет» и «легкомоторный самолет».
Результаты, полученные в КПУ 3, поступают на КВУ 4, где применяется корректор по большинству, использующий алгоритм голосования, после чего принимается решение о принадлежности ВО к определенному классу. Если принято решение о принадлежности ВО к классам «вертолет» или «легкомоторный самолет», дополнительно учитывается результат, полученный в КССВЭ 9.
Как показал эксперимент, вероятность правильного распознавания классов ВО «вертолет» и «легкомоторный самолет» в предложенном устройстве составила 0,81-0,88. Вероятность правильного распознавания остальных классов ВО не изменилась.
Таким образом, введение в прототип БВ ССВЭ 8 и КССВЭ 9 с соответствующими связями позволило учесть модуляцию сигналов, возникающую из-за наличия на ВО вращающихся элементов, что приводит к повышению вероятности правильного распознавания классов ВО «вертолет» и «легкомоторный самолет».
Источники информации
1. Бляхман А.Б., Рунова И.А. Радиотехника и электроника, 2001, т.46, №4, с.424.
2. Матюгин С.Н., Односевцев В.А. Распознавание радиотелеграфных сигналов КВ-диапазона. Труды XX Всероссийской конференции по распространению радиоволн. Н. Новгород, 2-4 июля 2002, изд-во ТАЛАМ, Н.Новгород, 2002, с.169.
3. Саблин В.Н., Чапурский В.В., Шейко А.П. Нейросетевое распознавание спектральных портретов воздушных объектов при наблюдении методом теневого инверсного радиолокационного синтезирования апертуры. Радиотехника и электроника, 2004, том 49, №2, с.184-195.
4. Матюгин С.Н., Бляхман А.Б. Устройство радиолокационного распознавания воздушных объектов. Патент №2324201 по заявке №2006115013 от 02.05.2006.
5. Матюгин С.Н., Бляхман А.Б. Устройство радиолокационного распознавания воздушных объектов. Патент №2324202 по заявке №2005134737 от 09.11.2005.
6. Селекция и распознавание на основе локационной информации. Под ред. проф. А.Л.Горелика, М.: Радио и связь, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2005 |
|
RU2324202C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2006 |
|
RU2324201C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2570111C1 |
| Способ распознавания радиолокационных объектов | 2017 |
|
RU2667516C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ В ДВУХДИАПАЗОННЫХ РАДИОЛОКАЦИОННЫХ КОМПЛЕКСАХ С АКТИВНЫМИ ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ (АФАР) | 2016 |
|
RU2665032C2 |
| Способ определения поперечных размеров цели по данным двух разнесенных позиций в многопозиционных РЛС с учетом их поляризационно-рассеивающих свойств | 2019 |
|
RU2708072C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
Изобретение относится к радиолокации и может быть использовано для распознавания воздушных объектов (ВО) в "просветных" радиолокационных станциях. Достигаемым техническим результатом изобретения является повышение вероятности правильного распознавания классов ВО «вертолет» и «легкомоторный самолет». Указанный результат достигается тем, что заявленное устройство содержит блок обработки радиолокационной информации, формирователь доплеровских портретов, классификаторы первого и второго уровня, вычислитель модуля трассовой скорости, пороговое устройство, формирователь эталонных данных, блок выделения спектральных составляющих вращающихся элементов и классификатор спектральных составляющих вращающихся элементов с соответствующими связями, определенным образом соединенные между собой. 2 ил.
Устройство радиолокационного распознавания воздушных объектов (ВО), состоящее из последовательно соединенных блока обработки радиолокационной информации (РЛИ), полученной с приемника радиолокационной станции, формирователя доплеровских портретов (ДП) распознаваемых ВО, классификатора первого уровня и классификатора второго уровня, а также последовательно соединенных со вторым выходом блока обработки РЛИ вычислителя модуля трассовой скорости, порогового устройства, выход которого соединен со вторым входом классификатора первого уровня, и формирователя эталонных данных, выход которого соединен с третьим входом классификатора первого уровня, три выхода которого в соответствии с признаками распознавания ВО соединены с тремя входами классификатора второго уровня, выход которого является выходом всего устройства, при этом блок обработки РЛИ предназначен для фильтрации сигнала от ВО и измерения частоты Доплера, амплитуды сигнала, азимута и скорости распознаваемого ВО, классификатор второго уровня предназначен для коррекции полученной информации по большинству признаков распознаваемых ВО и принятия решения о принадлежности ВО к определенному классу, формирователь эталонных данных предназначен для имитации сигналов ВО и формирования эталонных ДП и трассовых скоростей для каждого класса ВО, отличающееся тем, что в него введены соединенный с третьим выходом блока обработки РЛИ блок выделения спектральных составляющих вращающихся элементов (БВ ССВЭ), предназначенный для выделения, измерения частот и амплитуд ССВЭ и формирования доплеровских портретов ССВЭ, и соединенный с выходом БВ ССВЭ и вторым выходом формирователя эталонных данных классификатор спектральных составляющих вращающихся элементов (КССВЭ), который осуществляет классификацию ВО, сравнивая информацию, поступающую из БВ ССВЭ, с эталонной информацией, поступающей из формирователя эталонных данных, при этом выход КССВЭ соединен с четвертым входом классификатора второго уровня.
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2005 |
|
RU2324202C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2003 |
|
RU2226166C1 |
| СПОСОБ СКОРОСТНОЙ ВОЗДУШНОЙ РАЗВЕДКИ | 2009 |
|
RU2395782C1 |
| US 5689268 A, 18.11.1997 | |||
| US 4389647 A, 22.12.1980 | |||
| WO 2006133268 A2, 14.12.2006 | |||
| Люлька для расстойки тестовых заготовок | 1973 |
|
SU443658A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ТОКА | 0 |
|
SU211623A1 |
| US 5557278 A, 17.09.1996. | |||

