Изобретение относится к радиолокационным устройствам и предназначено для определения классов (классификация) и типов (идентификация) воздушных объектов по совокупности признаков.
Известна радиолокационная станция (РЛС) с инверсным синтезированием апертуры и перестройкой частоты [1], включающая первый потенциометрический датчик (ПД), соединенный своим выходом с входом первого аналого-цифрового преобразователя (АЦП), соединенного своим выходом с третьим входом блока расчета параметров движения цели (БРПДЦ), второй вход которого соединен с выходом второго АЦП, соединенного своим входом с выходом второго ПД, вход которого связан с выходом азимутального привода и вторым входом антенны, первый вход которой связан со входом первого ПД и выходом угломестного привода, вход которого соединен с выходом первого усилителя мощности (УМ), соединенного своим входом с выходом первого фазового детектора (ФД), первый вход которого соединен с выходом блока элементов линейной части приемника разностного угломестного канала (БЭЛЧПРУК), первый вход которого соединен с первым выходом моноимпульсного облучателя (МИО), первый вход-выход которого соединен с входом-выходом антенны, второй выход - с первым входом блока элементов линейной части приемника разностного азимутального канала (БЭЛЧПРАК), а второй вход-выход - с входом-выходом антенного переключателя (АП), соединенного своим выходом со вторым входом блока элементов линейной части приемника суммарного канала (БЭЛЧПСК), первый вход которого соединен со вторым входом БЭЛЧПРУК, вторым входом БЭЛЧПРАК и первым выходом первого ключа, соединенного первым входом с выходом задающего генератора (ЗГ), вторым выходом - с первым входом смеси геля, а вторым входом - со вторым выходом схемы управления (СУ), первый выход которой соединен со входом синтезатора частоты на поверхностных акустических волнах (СЧПАВ), четвертый выход - с первым входом системы измерения дальности (СИД), а третий выход - с третьим входом цифрового устройства получения регулируемой задержки (ЦУПРЗ), второй вход которого связан с выходом пульта управления оператора, первый вход - с первым выходом БРПДЦ, а выход - со вторым входом второго ключа и вторым входом третьего ключа, первый вход которого соединен с выходом третьего ФД, а выход - со входом пятого АЦП, соединенного своим выходом с первым входом блока компенсации поступательного движения (БКПД), второй вход которого связан со вторым выходом БРПДЦ, а выход - со вторым входом блока двумерного быстрого преобразования Фурье (БДБПФ), выход которого соединен со входом блока радиолокационного распознавания (БРЛР) и вторым входом блока отображения радиолокационного изображения (БОРЛИ), а первый вход - с выходом четвертого АЦП, вход которого связан с выходом второго ключа, первый вход которого соединен со вторым входом СИД, выход которой соединен со входом третьего АЦП, выход которого связан с первым входом БРПДЦ, первый вход второго ключа соединен также с выходом амплитудного детектора (АД), вход которого связан с первым входом третьего ФД, с выходом БЭЛЧПСК, вторым входом первого ФД и вторым входом второго ФД, первый вход которого соединен с выходом БЭЛЧПРАК, а выход - с входом второго УМ, соединенного своим выходом с входом азимутального привода, выход СЧПАВ связан со вторым входом третьего ФД и вторым входом смесителя, первый вход которого связан со вторым выходом первого ключа, а выход - со входом когерентного передатчика, соединенного своим выходом с входом АП, причем выход БРЛР соединен с первым входом БОРЛИ.
Данная РЛС способна формировать двумерные радиолокационные изображения (РЛИ) воздушных объектов (ВО) и распознавать их по правилу сравнения с эталонами [2, 3] в блоке радиолокационного распознавания. Объект относится к одному из определенных классов в соответствии с заранее установленным алфавитом путем сравнения полученной матрицы на выходе БДБПФ с набором эталонов. Один из возможных вариантов построения блока показан в [3].
Однако для проведения такого распознавания необходимо иметь очень большое число эталонов матриц по числу возможных ракурсов локации и типов воздушных объектов. При числе типов в алфавите более 10 вероятность идентификации воздушных объектов существенно снижается, а использование правила обобщенного голосования с использованием гистограмм признаков позволяет разделить объекты только по классам, отличающимся размерами или поведением. Если в интересах экономии времени на формирование признака проводить построение дальностного портрета (ДП) воздушного объекта (как одномерного РЛИ), то вероятность идентификации становится еще ниже. А число идентифицируемых ВО может быть любым, в том числе более 10. С учетом этого перспективные системы классификации и идентификации ориентируют в настоящее время на нейросетевые методы. Однако традиционное построение нейросетевых идентификаторов при достижении алфавитом объектов даже 20 единиц требует значительного увеличения числа слоев или количества нейронов в слоях искусственной нейронной сети (ИНС). Это, в свою очередь, предъявляет трудновыполнимые в настоящее время требования к нейрочипам и вызывает увеличение времени на обучение ИНС. Математическое моделирование показывает, что вероятность нейросетевой идентификации объектов при расширении алфавита также снижается.
Кроме того, РЛС [1] не может правильно обрабатывать сигналы с перестройкой частоты, отраженные от воздушного объекта, если дальность до него превышает однозначно измеряемую дальность, определяемую периодом повторения РЛС. Для формирования дальностных портретов или двумерных РЛИ импульсные сигналы с перестройкой частоты должны быть квазинепрерывными, т.е. иметь период повторения Ти не более десятков микросекунд. Поскольку однозначно измеряемая дальность не превышает величины сТи/2, где с - скорость распространения радиоволн, то при малом периоде Ти сигналы от объектов, удаленных на десятки километров, будут приниматься в других периодах повторения, где несущая частота заполнения зондирующего импульса иная. В этом случае опорный сигнал смесителя будет поступать в третий ФД на отличающейся от принятого сигнала частоте, что приведет к нарушению логики работы РЛС.
Известна также многочастотная радиолокационная станция с инверсным синтезированием апертуры и двухуровневым распознаванием целей [4], состоящая из четырех АЦП, второго УМ, связанного своим выходом с входом азимутального привода, выход которого связан со вторым входом антенны, вход-выход которой связан с первым входом-выходом МИО, а первый вход - с выходом угломестного привода, вход которого соединен с выходом первого УМ, связанного входом с выходом первого ФД, второй вход которого связан с выходом БЭЛЧПСК, входом АД, первым входом третьего ФД, первым входом системы измерения скорости и вторым входом второго ФД, а первый вход - с выходом БЭЛЧПРУК, второй вход которого связан с первым выходом первого ключа, вторым входом БЭЛЧПРАК, вторым входом БЭЛЧПСК, а первый вход - с первым выходом МИО, второй вход-выход которого соединен с входом-выходом АП, а второй выход - с первым входом БЭЛЧПРАК, выход которого связан с первым входом второго ФД, выход которого связан с входом второго УМ, а второй вход - с входом АД, выход которого соединен с первым входом второго ключа и вторым входом СИД, соединенной своим выходом с входом первого АЦП. Кроме того, ЗГ подключен своим выходом к первому входу первого ключа, соединенного вторым входом со вторым выходом СУ, а вторым выходом - с первым входом смесителя, соединенного выходом с входом когерентного передатчика (КгП), подключенного выходом к входу АП, выход которого связан с первым входом БЭЛЧПСК. Второй вход смесителя подключен ко второму входу схемы электронной задержки (СЭЗ) и выходу СЧПАВ, вход которого связан с первым выходом СУ, связанной своим входом с первым выходом пульта управления оператора (ПУО), второй выход которого подключен ко вторым входам второго и третьего ключей, а своим третьим выходом схема управления (СУ) подключена к первому входу СИД. При этом выход второго ключа соединен с входом второго АЦП, выход которого подключен к первому входу БКПД, а выход третьего ФД подключен к первому входу третьего ключа, соединенного своим выходом с входом третьего АЦП, выход которого подключен ко второму входу БКПД. Выход первого АЦП подключен к третьему входу БКПД и к первому входу СЭЗ, которая своим выходом ко второму входу третьего ФД и к второму входу СИС, которая своим выходом подключена к входу четвертого АЦП, который своим выходом подключен к четвертому входу БКПД, выход которого соединен с входом накопительного буфера, выход которого связан с входом блока обратного преобразования Фурье, выход которого подключен к входу оперативного запоминающего устройства (ОЗУ) и входу первого нейросетевого классификатора (НСК), выходы с первого по L-й которого подключены к соответствующим с первого по L-й входам цифрового коммутатора, (L+1)-й вход которого связан с выходом ОЗУ, а каждый l-й выход подключен ко входу соответствующего l-го второго НСК, каждый из которых имеет Z выходов, z-й выход l-го второго НСК связан с [(l-1)Z+z]-м входом табло вывода результатов распознавания (ТВРР).
Использование ДП воздушного объекта в качестве признака при идентификации позволяет получить достаточно высокие, судя по результатам моделирования, оценки вероятностей идентификации. Однако получение таких высоких оценок возможно только при курсовых углах летательного аппарата, близких к нулю. Недостатком прототипа является то, что в качестве признака идентификации в данном устройстве используется только ДП. При расширении диапазона изменения курсового угла вероятность идентификации ВО снижается ввиду снижения информативности ДП. Использование вместо ДП любого другого сигнального признака имеет свои ограничения и при определенных условиях не обеспечивает высоких вероятностей идентификации ВО. Траекторные признаки для различных классов (типов) объектов также могут иметь одинаковые значения, ведущие к неоднозначности идентификации. Исходя из вышеперечисленного, следует, что идентификация ВО по какому-либо одному из признаков не позволяет устанавливать тип объекта с необходимой вероятностью при изменениях условий формирования признаков распознавания. Для снижения ошибок идентификации необходимо объединить сигнальные и траекторные признаки в одном алгоритме распознавания, что может позволить повысить вероятность идентификации. Одной из основных сложностей при комплексировании признаков квазивероятностными методами, например, при использовании алгоритмов обобщенного или взвешенного голосования, является определение коэффициента значимости каждого признака при принятии решения. Определение коэффициентов значимости - труднореализуемый процесс, требующий больших временных затрат. А неверное определение коэффициентов значимости снижает эффективность идентификации объектов при ограниченном количестве информативных признаков и широком диапазоне условий их формирования и локации ВО. При решении задачи комплексирования признаков одним из перспективных направлений является применение нейросетевого метода. Преимуществом использования в качестве идентификаторов нейронных сетей является их способность при обучении самостоятельно подбирать коэффициенты значимости (веса) признаков.
Таким образом, недостатками радиолокационной станции [4] являются:
уменьшение вероятности правильной идентификации ВО при его полетах с курсовыми углами, отличающимися от нулевого;
использование при идентификации только одного признака - дальностного портрета ВО при наличии потенциальных возможностей повышения вероятности идентификации за счет комплексирования траекторных и сигнальных признаков.
Задачей изобретения является повышение достоверности разделения воздушных объектов на классы и их последующей идентификации в пределах классов за счет использования совокупности признаков в нейросетевом идентификаторе, а также двухуровневого построения схемы.
Поставленная задача решается за счет того, что в состав известной, описанной выше РЛС [4], включающей два УМ, угломестный и азимутальный приводы, антенну, три ФД, МИО, БЭЛЧПРУК, БЭЛЧПРАК, БЭЛЧПСК, АП, КгП, ЗГ, три ключа, четыре АЦП, АД, СИД, ПУО, СУ, СЧПАВ, смеситель, БКПД, СЭЗ, СИС, устройство двухуровневого распознавания, состоящее из накопительного буфера (НБ), блока обратного быстрого преобразования Фурье (БПФ), ОЗУ, первого НСК (являющегося классификатором первого уровня), L вторых НСК (являющихся классификаторами второго уровня), ЦК и ТВРР, предлагается дополнительно включить блок выделения высоты (БВВ), блок выделения эффективной площади рассеяния (БВЭПР) и блок выделения скорости (БВС).
Радиолокационная станция-прототип характеризуется тем, что в ней второй УМ связан своим выходом с входом азимутального привода, первый выход которого связан со вторым входом антенны, вход-выход которой связан с первым входом-выходом МИО, а первый вход - с первым выходом угломестного привода, вход которого соединен с выходом первого УМ, связанного входом с выходом первого ФД, второй вход которого связан с выходом БЭЛЧПСК, входом АД, первым входом третьего ФД, вторым входом СИС и вторым входом второго ФД, а первый вход - с выходом БЭЛЧПРУК, второй вход которого связан с первым выходом первого ключа, вторым входом БЭЛЧПРАК, вторым входом БЭЛЧПСК, а первый вход - с первым выходом МИО, второй вход-выход которого соединен с вход-выходом АП, а второй выход - с первым входом БЭЛЧПРАК, выход которого связан с первым входом второго ФД, выход которого связан с входом второго УМ, а второй вход - с входом АД, выход которого соединен с первым входом второго ключа и вторым входом СИД, соединенной своим выходом с входом первого АЦП. Кроме того, ЗГ подключен своим выходом к первому входу первого ключа, соединенного вторым входом со вторым выходом СУ, а вторым выходом - с первым входом смесителя, соединенного выходом с входом КгП, подключенного выходом к входу АП, выход которого связан с первым входом БЭЛЧПСК. Второй вход смесителя подключен ко второму входу СЭЗ и выходу СЧПАВ, вход которого связан с первым выходом СУ, связанной своим входом с первым выходом ПУО, второй выход которого подключен ко вторым входам второго и третьего ключей. Своим третьим выходом СУ подключена к первому входу СИД. Выход второго ключа соединен с входом второго АЦП, выход которого подключен к первому входу БКРД, а выход третьего ФД подключен к первому входу третьего ключа, соединенного своим выходом с входом третьего АЦП, выход которого подключен ко второму входу БКПД. Выход первого АЦП подключен к третьему входу БКПД и к первому входу СЭЗ, которая своим выходом подключена ко второму входу третьего ФД и к первому входу СИС, которая своим выходом подключена к входу четвертого АЦП, который своим выходом подключен к четвертому входу БКПД, выход которого соединен с входом НБ, выход которого связан с входом блока обратного БПФ, выход которого подключен к входу ОЗУ и входу первого НСК, выходы с первого по L-й которого подключены к соответствующим с первого по L-й входам ЦК, (L+l)-й вход которого связан с первым выходом ОЗУ, а каждый l-й первый выход подключен к первому входу соответствующего l-го второго НСК, каждый из которых имеет Z выходов, причем z-й выход l-го второго НСК связан с [(l-1)Z+z]-M входом ТВРР.
В предлагаемой РЛС с новой структурой первый вход БВВ предлагается подключить ко второму выходу угломестного привода, второй вход - к выходу первого АЦП, а выход - к третьим входам ОЗУ и первого НСК, первый вход блока выделения ЭПР предлагается подключить к выходу первого АЦП, второй вход - к выходу второго АЦП, а выход - ко вторым входам ОЗУ и первого НСК. Первый вход БВС предлагается подключить к выходу четвертого АЦП, второй вход - ко второму выходу привода азимутального, третий вход - ко второму выходу привода угломестного, четвертый вход - к выходу первого АЦП, а выход - к четвертым входам ОЗУ и первого НСК, причем с 2-го по 4-й выходы ОЗУ предлагается подключить к соответствующим с (L+2)-го по (L+4)-й входам ЦК, каждый l-й второй выход ЦК - к второму входу соответствующего l-го второго НСК. Каждый l-й третий выход ЦК следует подключить к третьему входу соответствующего l-го второго НСК, а каждый l-й четвертый выход ЦК - соединить с четвертым входом соответствующего l-го второго НСК.
Такое построение структурной схемы радиолокационной станции придает ей способность использовать совокупность траекторных и сигнальных признаков при идентификации воздушных объектов.
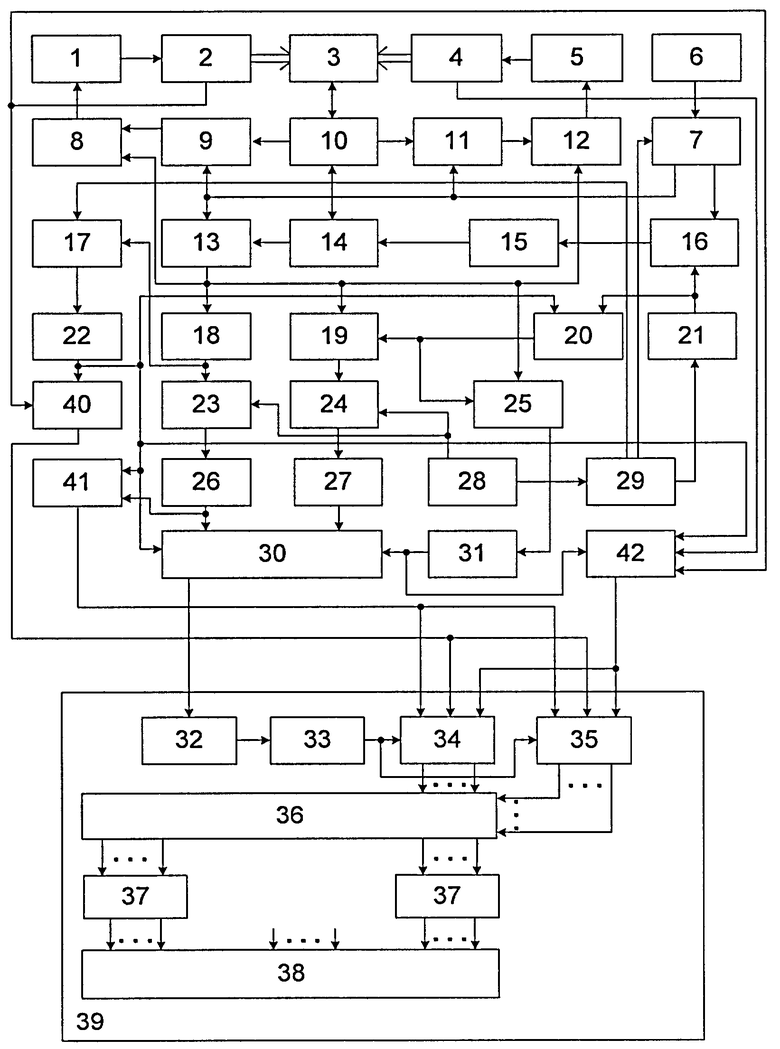
Структурная схема предлагаемой радиолокационной станции с перестройкой частоты, инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием объектов по совокупности признаков представлена на чертеже. Согласно данной схеме радиолокационная станция с перестройкой частоты, инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием объектов по совокупности признаков содержит первый УМ 1, привод угломестный 2, антенну 3, привод азимутальный 4, второй УМ 5, ЗГ 6, первый ключ 7, первый ФД 8, БЭЛЧПРУК 9, МИО 10, БЭЛЧПРАК 11, второй ФД 12, БЭЛЧПРСК 13, АП 14, КгП 15, смеситель 16, СИД 17, АД 18, третий ФД 19, СЭЗ 20, СЧПАВ 21, первый АЦП 22, второй ключ 23, третий ключ 24, СИС 25, второй АЦП 26, третий АЦП 27, ПУО 28, СУ 29, БКПД 30, четвертый АЦП 31, БВВ 40, БВЭПР 41, БВС 42, а также устройство двухуровневого распознавания 39, в состав которого входят: НБ 32, блок обратного БПФ 33, ОЗУ 34, первый НСК 35, ЦК 36, L вторых НСК 37, ТВРР 38.
Радиолокационная станция с перестройкой частоты, инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием объектов по совокупности признаков работает следующим образом. Задающий генератор 6 формирует высокостабильные высокочастотные электромагнитные колебания на несущей частоте f0 и через 1-й ключ 7 попеременно подает их то на первый вход смесителя 16, то на вторые входы БЭЛЧПРАК 11, БЭЛЧПРУК 9 и БЭЛЧПРСК 13. Схема управления 29 формирует импульсные сигналы (видеоимпульсы) длительностью τи и периодом повторения Ти. Эти сигналы определяют период повторения зондирующих сигналов радиолокационной станции, а также управляют первым ключом 7, когерентным передатчиком 15 (через СЧПАВ 21 и смеситель 16) и работой СИД 17, поступая с третьего выхода СУ 29 на первый вход СИД 17. Видеоимпульсы длительностью τи со второго выхода СУ 29 поступают на управляющий вход первого ключа 7, который на время их действия коммутирует выход ЗГ 6 с первым входом смесителя 16. В остальное время (когда нет управляющего сигнала из схемы управления 29) сигнал ЗГ 6 проходит на вторые входы БЭЛЧПРУК 9, БЭЛЧПРАК 11 и БЭЛЧПСК 13.
Сигналы с выхода синтезатора частоты на поверхностных акустических волнах 21 с частотами fпр+nΔf (где fпр - промежуточная частота, Δf - величина шага перестройки частоты от импульса к импульсу, n - номер излучаемого импульса) в соответствии с управляющими импульсами с первого выхода СУ 29 подаются на второй вход СЭЗ 20. В СЧПАВ 21 постоянно генерируются высокочастотные колебания на каждой из N частот, что исключает необходимость временных затрат на исключение влияния переходных процессов и ожидание установления стабильного режима генерации колебаний на n-й частоте. После перехода к n-й частоте следует лишь коммутировать выход n-го генератора с главным выходом СЧПАВ 21. На вход СЭЗ 20 в зависимости от управляющих импульсов с первого выхода СУ 29 поступает сигнал на n-й частоте. Управляющие импульсы представляют собой двоичный код, определяющий номер соответствующей n-й частоты. Причем период следования управляющих импульсов с первого выхода СУ 29 совпадает с Ти. Вариант построения СЧПАВ 21 показан в [5, с.108-109, рис.5.35].
Назначение СЭЗ 20 заключается в осуществлении задержки сигналов СЧПАВ 21 для их дальнейшего прохождения на второй вход третьего ФД 19 в момент присутствия на его первом входе отраженных сигналов, задержанных на величину tз=2R7c, где R - дальность до ВО. Блок 20 в своем составе содержит электронный коммутатор и совокупность линий задержки. Первый и второй входы электронного коммутатора являются соответственно первым и вторым входами СЭЗ 20. Назначение электронного коммутатора заключается в коммутации выхода СЧПАВ 21 с соответствующей линией задержки в зависимости от информации о дальности до ВО (времени задержки отраженных сигналов tз), которая в виде цифрового кода поступает с выхода первого АЦП 22. Таким образом, СЭЗ 20 обеспечивает третий ФД 19 опорными колебаниями той же частоты, на которой был излучен принятый через tз сигнал. Количество линий задержки М определяется разрешающей способностью δR|| радиолокатора в радиальном направлении и предельной дальностью действия Rmax РЛС: M=Rmax/δR||.
В режиме квазинепрерывного излучения сигналы с выхода СЧПАВ 21 в соответствии с управляющими сигналами с первого выхода СУ 29 подаются на второй вход смесителя 16 и через СЭЗ 20 - на второй вход третьего ФД 19. Полоса пропускания выходного фильтра смесителя 16 выбирается от f0+fпр до f0+fпр+NΔf, где N - количество используемых частот зондирования. При этом должно выполняться условие fпр>NΔf. В этом случае на выходе смесителя 16 будет присутствовать только узкополосный сигнал на одной из частот зондирования, а кратные гармоники будут подавляться. Сигнал с выхода смесителя 16 поступает на КгП 15, который формирует сверхвысокочастотные импульсные сигналы заданной длительности и через АП 14 и МИО 10 передает их в антенну 3, которая излучает электромагнитные волны в направлении ВО. Вариант построения когерентного передатчика показан в [6, с.61, рис.4.3]. Отразившись от ВО, излученные сигналы с измененной структурой возвращаются к антенне 3, улавливаются ею и проходят на МИО 10, устройство которого также широко известно в радиолокации [7, с.387, рис.13.13].
Моноимпульсный облучатель 10 имеет второй вход-выход суммарного канала, первый выход разностного угломестного канала и второй выход разностного азимутального канала. Уровень сигналов в данных каналах зависит от положения цели относительно равносигнального направления. В разностных каналах сигнал появляется только тогда, когда имеет место отклонение ВО от равносигналыюго направления в соответствующей плоскости. Таким образом, МИО 10 является главным элементом, обеспечивающим слежение антенной системы за целью. Со второго вход-выхода МИО 10 (представляющего суммарный канал) сигнал через АП 14 подается на второй вход БЭЛЧПСК 17.
Первый выход угломестного разностного канала облучателя 10 подключен к первому входу БЭЛЧПРУК 9, а второй выход разностного азимутального канала МИО - к первому входу БЭЛЧПРАК 11. Как видно из чертежа, начальная часть структурной схемы РЛС построена по классической схеме амплитудной суммарно-разностной моноимпульсной (без схемы автоматической регулировки усиления) системы сопровождения ВО по направлению [8, с.424; 9, с.450]. Однако в ней в качестве суммарно-разностного преобразователя используется МИО 10, а элементы приемных трактов (смесители, фильтры, усилители промежуточной частоты) объединены в блоки элементов линейных частей приемников. Поступившие в блоки элементов линейной части приемников сигналы фильтруются (освобождаются от сигналов посторонних частот), их частота понижается в смесителях до промежуточной, после чего они усиливаются до величин, необходимых для работы последующих устройств. С выходов блоков 9 и 11 усиленные сигналы поступают соответственно на первые входы первого ФД 8 и второго ФД 12.
Информация о величине рассогласования ВО относительно линии визирования (равносигнального направления) по угловым координатам заложена в амплитуде сигналов разностных каналов, а о направлении рассогласования - в их фазах. Поэтому для выделения напряжений, пропорциональных угловым рассогласованиям, применяются фазовые детекторы 8 и 12, преобразующие разностные сигналы в видеосигналы. В качестве опорного напряжения фазовых детекторов 8 и 12, подаваемого на их вторые входы, используется выходной сигнал БЭЛЧПСК 13. С выходов ФД 8 и 12 видеосигналы, пропорциональные угловому рассогласованию ВО относительно линии визирования в угломестной и азимутальной плоскостях, поступают соответственно на вход первого и второго усилителей мощности 1 и 5, где происходит их увеличение до значений, достаточных для работы приводов 2 и 4, в состав которых могут входить электродвигатели, редукторы и т.п. Принцип работы и параметры указанных выше элементов раскрыты в [10]. Наиболее простым для понимания составом приводов является двигатель и редуктор, механически связывающий двигатель с антенной. Примерами подобного построения моноимпульсной системы сопровождения цели являются [11, с.17, рис.1.12, а; 12, с.154, рис.4.23, 4.25; 13, с.448, рис.10.15]. Выходные сигналы ФД 8 и 12, усиленные в соответствующих УМ 1 и 5, поступают на входы угломестного привода 2 и азимутального привода 4, которые механически связаны с антенной 3. Редукторы приводов воздействуют на антенну таким образом, чтобы развернуть ее в направлении сопровождаемого воздушного объекта.
С выхода БЭЛЧПСК 13 через АД 18 сигнал поступает на СИД 17. Система измерения дальности построена по классической схеме [9, с.323, рис.7.23] и состоит из регулируемой цепи задержки (РЦЗ), генератора двух следящих полустробов, временного различителя и управляющего устройства. СИД представляет собой замкнутую систему автоматического регулирования. В начале сопровождения используется импульсный режим работы с большим периодом повторения (Ти>1 мс) для верного и однозначного измерения дальности R. Затем по команде с ПУО 28 РЛС переходит в режим квазинепрерывного излучения с малой скважностью и малым периодом. При этом с третьего выхода СУ 29 на вход СИД 17 будет поступать последовательность импульсов, соответствующая малому периоду. При уменьшении периода Ти измеренная дальность до ВО может быть ошибочной при задержке отраженного сигнала более чем на Ти. Поэтому при переходе в режим квазинепрерывного излучения сигналы с третьего выхода СУ 29 поступать прекращают, и СИД прекращает свою работу на время излучения и приема квазинепрерывной пачки сигналов с перестройкой частоты (с малой скважностью). В этом случае на выходе первого АЦП 22 сигнал о дальности до ВО пропадает. А СЭЗ 20 при отсутствии новой информации о дальности остается в состоянии, соответствующем дальности до ВО, измеренной в импульсном режиме.
Сигнал с выхода АД 18 поступает на первый вход временного различителя, второй и третий входы которого связаны с соответствующими выходами генератора двух следящих полустробов, вход которого связан с выходом регулируемой цепи задержки (РЦЗ), первый вход которой связан с выходом управляющего устройства, вход которого связан с выходом временного различителя. РЦЗ запускается импульсами схемы управления длительностью Ти, поступающими на первый вход СИД. Первый вход СИД является входом РЦЗ, которая вырабатывает импульсы задержки. Длительность этих импульсов пропорциональна управляющему напряжению дальности, приходящему с выхода управляющего устройства. Задний срез импульса задержки дифференцируется, и сформированный при этом сигнал запускает генератор двух следящих полустробов. Полученные в нем полустробы поступают на временной различитель, состоящий из двух каскадов совпадения и схемы сравнения. Полустробы поочередно открывают каскады совпадения, вследствие чего часть отраженного сигнала с выхода АД 18 проходит через первый, а часть - через второй каскады совпадений. На выходе временного различителя стоит схема сравнения, вырабатывающая напряжение сигнала ошибки, пропорциональное отклонению отраженного сигнала от стыка полустробов. Полярность сигнала ошибки определяется направлением отклонения.
При движении ВО положение отраженного им сигнала на выходе АД 18 будет изменяться, вызывая рассогласование между импульсом от ВО и стыком полустробов. Это приводит к изменению сигнала ошибки, который после преобразования и усиления в управляющем устройстве изменяет напряжение на его выходе (это и есть сигнал, пропорциональный дальности до ВО), которое заставляет РЦЗ сместить полустробы в положение, при котором сигнал ошибки равен нулю. Выходом СИД 17 является выход управляющего устройства. С выхода СИД 17 сигнал, пропорциональный дальности до объекта, поступает на вход первого АЦП 22, который переводит аналоговый сигнал дальности в цифровой вид и подает его для дальнейшего использования на третий вход БКПД 30 и на первый вход СЭЗ 20.
Сигналы с выхода БЭЛЧПСК 13 поступают на входы АД 18 и третьего ФД 19, а затем на входы ключей 23 и 24, которые пропускают сигнал на входы второго и третьего АЦП 26 и 27 соответственно при наличии на вторых входах ключей импульсного сигнала, соответствующего логической единице с первого выхода ПУО 28. Сигнал логической единицы может формироваться автоматически при переходе на автосопровождение ВО, или же оператор после перехода РЛС в режим сопровождения может принять решение на радиолокационное распознавание ВО и нажать на соответствующую кнопку на ПУО 28. После поступления на вторые входы ключей 23 и 24 разрешающего импульсного сигнала на входы второго АЦП 26 и третьего АЦП 27 поступает информация только от N импульсов (от N периодов повторения), необходимых для формирования ДП объекта. Причем по причине большого диапазона дальностей запись последовательности сигналов может начаться не с сигнала первой частоты, т.е. первый записанный сигнал в момент открытия ключей может иметь любую n-ю частоту из N возможных. В следующий момент времени будет записан сигнал на (n+1)-й частоте и так далее. После запоминания параметров последовательности из N сигналов в БКПД 30 осуществляется проверка ее структуры и преобразование последовательности таким образом, чтобы обеспечивалось линейное изменение частоты заполнения сигналов, начиная с первой частоты и заканчивая N-й. Это возможно потому, что РЛС всегда осуществляет контроль своего режима, т.е. всегда имеет информацию о номере используемой в данное время частоты перестройки. С учетом дальности до ВО всегда известен номер частоты в конкретном периоде повторения. Расстановка сигналов в порядке возрастания частоты необходима для правильного и корректного формирования ДП объекта с помощью БПФ.
Пульт управления оператора 28 представляет собой блок, в котором может находиться некоторое количество кнопок, тумблеров и реле, коммутирующих различные режимы работы РЛС. В данном конкретном случае ПУО 28 кроме всего прочего содержит кнопку, реле времени и источник питания, принципиально необходимые для записи параметров последовательности из N сигналов. С помощью этих элементов включается режим накопления и записи отраженных сигналов. После нажатия кнопки срабатывает и встает на самоблокировку реле времени, обеспечивающее подачу на второй выход ПУО 28 постоянного положительного сигнала управления, коммутирующего первые входы ключей с их выходами на время приема одной пачки сигналов с перестройкой частоты. Таким образом, в БКПД 30 и устройство двухуровневого распознавания 39 поступают оцифрованные параметры только одной реализации сигналов на N частотах. Ключи 23 и 24 исключают проникновение сигналов в БКПД 30 и далее в устройство двухуровневого распознавания 39 при отсутствии команды на распознавание ВО.
С выхода второго АЦП 26 сигнал, характеризующий амплитуду отраженного сигнала, в цифровом виде поступает на первый вход БКПД 30, а сигнал, несущий информацию о фазе отраженного сигнала, с выхода третьего АЦП 27 в цифровой форме поступает на второй вход БКПД 30.
С выхода БЭЛЧПСК 13 отраженные сигналы поступают на первый вход СИС 25, на второй вход которой поступают опорные сигналы на той же частоте (не принимая во внимание несущую частоту f0), на которой был излучен сигнал в направлении ВО. За правильную подачу сигнала соответствующей частоты отвечает СЭЗ 20. Система измерения скорости 25 включает в себя схему частотного дискриминатора, которая в качестве опорного напряжения использует сигнал с выхода СЭЗ 20. Амплитуда напряжения с выхода дискриминатора, пропорциональная доплеровскому сдвигу частоты, поступает на четвертый АЦП 31 и далее в цифровом виде - на четвертый вход БКПД 30. Блок 30 представляет собой электронно-вычислительную машину, то есть вычислительный комплекс, пример реализации и применения которого приведен в [14, с.255, рис.7.1, с.287, рис.7.10, с.291, рис.7.11; 15, с.77, рис.3.20, с.79, рис.3.21, с.133, рис.4.22].
Блок 30 рассчитывает изменение фазы Δφn, обусловленное поступательным движением объекта [16], по формуле Δφn=2kVrTиn, где k - волновое число, n - номер запоминаемого импульса, Vr - радиальная скорость ВО. Данные о Vr поступают на четвертый вход БКПД 30 с выхода четвертого АЦП 31. Кроме того, блок 30 рассчитывает значение фазы, связанное с начальной дальностью R0 до ВО ΔφRn=4πR0/λn. Физический смысл операции компенсации дальности и поступательного движения приведен в [16]. В блоке 30 рассчитывается результирующее значение фазы φвз n, связанное только с взаимным расположением рассеивающих центров на планере ВО в радиальном направлении
φвз n=φΣn-Δφn-ΔφRn,
где φвз n - значение фазы принятого сигнала в n-й момент времени, связанное только с радиальным взаимным расположением рассеивающих центров на планере ВО; ΔφΣn - входное (суммарное) значение фазы сигнала n-го момента времени на втором входе блока 30; Δφn - компенсируемое значение фазы сигнала в n-й момент времени, рассчитываемое по формуле Δφn=2kVrTиn и связанное с перемещением объекта; ΔφRn - компенсируемое значение фазы, связанное с начальной дальностью до ВО на n-й частоте.
После вычитания вредных фазовых сдвигов на выходе БКПД 30 формируется комплексный сигнал вида  , где An и Ψn - соответственно амплитуда и фаза отраженного сигнала на n-й частоте.
, где An и Ψn - соответственно амплитуда и фаза отраженного сигнала на n-й частоте.
Для классификации и дальнейшей идентификации объектов оцифрованные значения амплитуд и фаз отраженных сигналов с выхода БКПД 30 поступают на вход устройства двухуровневого распознавания 39. Вход устройства двухуровневого распознавания одновременно является входом НБ 32. В качестве НБ может использоваться ферритовый куб, описанный в [13, стр.657]. НБ 32 служит для записи (накопления) значений амплитуд и фаз отраженных сигналов с выхода БКПД 30 и формирования из них комплексной частотной характеристики объекта. С выхода НБ 32 сформированная комплексная частотная характеристика в виде массива чисел поступает на вход блока обратного БПФ 33, в котором с помощью операции БПФ формируется массив (вектор) ДП ВО [17]. Сформированный в результате преобразования вектор поступает на входы ОЗУ 34 и первого НСК 35. В качестве простейшего ОЗУ может использоваться магнитный барабан [13, с.660].
Одним из признаков, используемых при идентификации воздушных объектов, в предлагаемой РЛС является полная скорость Vц движения ВО. Скорость движения объекта предлагается выделять в БВС 42 через ее ортогональные составляющие скорости: радиальную Vr, направленную по линии РЛС-ВО, и тангенциальную Vτ, тогда  Составляющие скорости равны
Составляющие скорости равны  и
и  где Δγ - изменение положения линии визирования в пространстве в течение интервала Δt, R2 - наклонная дальность до ВО в конце установленного интервала, R1 - наклонная дальность до ВО в начале установленного интервала, а ωγ - угловая скорость поворота в пространстве линии визирования объекта [18, с.36]. Величина Δγ находится по формуле Δγ=γ2-γ1, где γ1 - положение линии визирования объекта в начале установленного интервала времени, а γ2 - положение линии визирования объекта в конце установленного интервала времени. Величина угла γ1 находится по формуле γ1=arccos(cosε1cosβ1), a γ2=arccos(cosε2cosβ2), где ε1 и β1 - значения угла места и азимута ВО в начале установленного интервала, а ε2 и β2 - значения угла места и азимута ВО в конечный момент установленного интервала времени. Для выделения полной скорости объекта Vц используется сигнал, который формируется на выходе четвертого АЦП 31. Этот оцифрованный сигнал пропорционален доплеровскому сдвигу частоты (радиальной составляющей вектора скорости). С выхода первого АЦП 22 на 4-й вход блока 42 поступает цифровой сигнал, пропорциональный дальности до объекта. Со второго выхода привода угломестного 2 блок 42 получает сигналы, пропорциональные значениям углов ε1 и ε2, а со второго выхода привода азимутального 4 - сигналы, пропорциональные значениям углов β1 и β2, после чего производит их оцифровку. Используя перечисленные выше входные данные, БВС 42 рассчитывает Vц на интервале времени Δt по формуле
где Δγ - изменение положения линии визирования в пространстве в течение интервала Δt, R2 - наклонная дальность до ВО в конце установленного интервала, R1 - наклонная дальность до ВО в начале установленного интервала, а ωγ - угловая скорость поворота в пространстве линии визирования объекта [18, с.36]. Величина Δγ находится по формуле Δγ=γ2-γ1, где γ1 - положение линии визирования объекта в начале установленного интервала времени, а γ2 - положение линии визирования объекта в конце установленного интервала времени. Величина угла γ1 находится по формуле γ1=arccos(cosε1cosβ1), a γ2=arccos(cosε2cosβ2), где ε1 и β1 - значения угла места и азимута ВО в начале установленного интервала, а ε2 и β2 - значения угла места и азимута ВО в конечный момент установленного интервала времени. Для выделения полной скорости объекта Vц используется сигнал, который формируется на выходе четвертого АЦП 31. Этот оцифрованный сигнал пропорционален доплеровскому сдвигу частоты (радиальной составляющей вектора скорости). С выхода первого АЦП 22 на 4-й вход блока 42 поступает цифровой сигнал, пропорциональный дальности до объекта. Со второго выхода привода угломестного 2 блок 42 получает сигналы, пропорциональные значениям углов ε1 и ε2, а со второго выхода привода азимутального 4 - сигналы, пропорциональные значениям углов β1 и β2, после чего производит их оцифровку. Используя перечисленные выше входные данные, БВС 42 рассчитывает Vц на интервале времени Δt по формуле  где Rcp=(R2-R1)/2, Δγ=arccos(cosε2cosβ2)-arccos(cosε1cosβ1).
где Rcp=(R2-R1)/2, Δγ=arccos(cosε2cosβ2)-arccos(cosε1cosβ1).
Величина интервала At составляет от 2 до 4 секунд. После вычисления Vц цифровое значение полной скорости ВО поступает в устройство двухуровневого распознавания 39 на четвертые входы ОЗУ 34 и первого НСК 35.
Другим признаком, используемым при идентификации воздушных объектов, является высота полета объекта. Для выделения данного признака предназначен БВВ 40. Входными значениями для вычисления высоты полета объекта являются: наклонная дальность до объекта R и угол места воздушного объекта ε. Высота полета объекта вычисляется по формуле Н=Rsinε. Для этого БВВ 40 своим первым входом связан со вторым выходом угломестного привода, откуда снимается значение угла ε, а своим вторым входом - с выходом первого АЦП 22, с выхода которого в цифровом виде снимается сигнал, пропорциональный наклонной дальности до объекта R. После вычисления в блоке 40 значение высоты Н в цифровом виде поступает в устройство двухуровневого распознавания 39 на третьи входы ОЗУ 34 и первого ИСК 35.
Еще одним признаком, используемым в процессе идентификации и классификации ВО, является эффективная площадь рассеяния (ЭПР). Для вычисления этого признака предназначен БВЭПР 41. Понятие ЭПР широко известно в радиолокации [7-9, 15]. Эффективная площадь рассеяния служит характеристикой отражательной способности ВО, и поэтому для объектов разных типов и классов принимает при прочих равных условиях разные значения. Данный признак является высокоинформативным и способным внести свой вклад в достоверность распознавания.
Для вычисления ЭПР используются сигналы с выходов 1-го и 2-го АЦП. С выхода 1-го АЦП снимается сигнал, пропорциональный наклонной дальности ВО, а с выхода 2-го АЦП - пропорциональный интенсивности (амплитуде) отражения от ВО. Предполагается, что в составе БЭЛЧПСК 13 отсутствует схема автоматической регулировки усиления (АРУ). Если же ее применение необходимо, то сигнал, пропорциональный интенсивности отражения, можно снимать с точки, в которой действует сигнал управления АРУ. Тогда для формирования сигнала интенсивности отражения дополнительно потребовался бы инвертор. Однако в данной РЛС динамический диапазон измерения амплитуды должен быть очень широк, в связи с чем схема АРУ в БЭЛЧПСК 13 не предусмотрена.
Блок 41 заранее подготавливается к расчету усредненного значения ЭПР. Для этого предварительно на этапе испытаний РЛС методом натурного эксперимента формируются градуировочные характеристики. Число характеристик определяется числом элементов разрешения δR по наклонной дальности R и числом N используемых рабочих частот. Это обусловлено тем, что коэффициент усиления антенны на разных частотах принимает различные значения, а интенсивность отражения от ВО со стабильной ЭПР нелинейно (по квазиквадратичному закону) зависит от дальности. Градуировочные характеристики получают с помощью эталонных уголковых или шарообразных отражателей, ЭПР которых известна и табулирована. Для упрощения построения таких характеристик целесообразно использовать эталонные отражатели с изменением ЭПР по декадам, т.е. с ЭПР, равной 0,01 м2, 0,1 м2, 1 м2, 10 м2 и 100 м2. Такие эталонные отражатели поочередно (на этапе подготовки градуировочных характеристик) располагают на изменяющейся дальности и для каждого значения дальности и каждого значения частоты фиксируют уровень амплитуды отраженного сигнала. Затем соединяют точки характеристик, полученных для каждой частоты для разных значений известной ЭПР, и объединяют их в семействе дальностных характеристик.
Наличие предлагаемых градуировочных характеристик в БВЭПР 41 позволяет (по информации о номере используемой частоты, амплитуде принятого сигнала с учетом реальной наклонной дальности) определять мгновенное значение ЭПР ВО, соответствующее текущим условиям локации, т.е. текущей дальности и используемой в данном периоде повторения частоте.
Блок 41 накапливает N значений ЭПР, полученных в N периодах зондирования на разных частотах. Известно, что мгновенное значение ЭПР не обладает информативностью, так как оно зависит от мгновенного взаимного расположения рассеивателей на поверхности объекта. Поэтому в теории распознавания пользуются только усредненным значением ЭПР. Усреднение обычно проводится по времени. Однако в предлагаемой РЛС частота зондирования меняется, вследствие чего усреднение по времени (т.е. ракурсу) целесообразно в данном случае заменить на усреднение по частоте излучения. При этом значение ЭПР перестает зависеть от проявления турбовинтового эффекта и влияния шумов, так как их математические ожидания на большой выборке отсчетов равны нулю.
В блоке 41 N полученных (из градуировочных характеристик) значений ЭПР ВО усредняются с помощью выражения

где σn - мгновенное значение ЭПР, полученное по амплитуде n-го отраженного сигнала.
Сигналы синхронизации, необходимые для получения информации о номере (величине) используемой частоты, в схеме не показаны. Однако РЛС всегда контролирует свой режим работы и может предоставить информацию о номере частоты в любую систему или блок.
Усредненное значение ЭПР ВО σср в качестве 4-го признака распознавания с выхода БВЭПР 41 поступает на вторые входы ОЗУ 34 и первого НСК 35. Перед этим в блоке 41 усредненное значение ЭПР нормируется по отношению к масимально возможному значению.
ОЗУ 34 предназначено для длительного хранения нормированного вектора ДП, цифрового нормированного значения полной скорости Vц ВО, цифрового нормированного значения высоты Нц полета ВО, цифрового нормированного значения ЭПР σц ВО и последующей передачи вектора нормированного ДП на (L+1)-й вход ЦК 36, цифрового нормированного значения ЭПР - на (L+2)-й вход ЦК 36, цифрового нормированного значения высоты полета ВО - на (L+3)-й вход ЦК 36, а цифрового нормированного значения полной скорости ВО - на (L+4)-й вход цифрового коммутатора 36.
Первый НСК 35 представляет собой ИНС, обученную распознаванию классов (классификации) ВО. Задача определения класса, т.е. классификация, является задачей первого уровня распознавания. Варианты исполнения ИНС, в том числе и нейропроцессоров, подробно описаны в [19, 20, 21]. В данном случае первый НСК 35 обучен решению задачи распознавания L классов ВО. В зависимости от установленного класса с L выходов блока 36 снимается двоичный сигнал, который формируется следующим образом. На этапе обучения на вход ИНС подают К предварительно сформированных векторов, состоящих из совокупности нормированных цифровых значений полной скорости, нормированных цифровых значений высот, нормированных цифровых значений ЭПР, а также дальностных портретов ВО по В для каждого распознаваемого класса. Например, при распознавании пяти классов ВО K=5 В. Число векторов в обучающем массиве для каждого ВО выбирается с учетом необходимости обучения ИНС на максимально возможном числе совокупностей используемых признаков одного воздушного объекта при различных ракурсах локации, а также с учетом и вычислительных возможностей конкретного нейрочипа. Обучение осуществляется на этапе подготовки и сборки устройства двухуровневого распознавания 39. Вместе с обучающим массивом векторов совокупности используемых признаков на этапе подготовки нейронной сети предъявляются целевые векторы. Число целевых векторов всегда совпадает с числом векторов совокупности используемых признаков. Целевые векторы являются двоичными, т.е. состоят из единиц и нулей. Число элементов каждого из К целевых векторов совпадает с числом выходов первого нейросетевого классификатора и соответствует числу распознаваемых классов. Причем структура целевых векторов для каждого из классов одинакова. Например, при распознавании пяти классов ВО и наличии для каждого класса 1000 обучающих векторов общее число векторов обучения и целевых векторов составит по 5000. Для первого класса целевые векторы будут иметь структуру вида «1 0 0 0 0», для второго класса - «0 1 0 0 0» и т.д. При предъявлении сети обучающих и целевых векторов в ИНС начинается формирование матрицы весовых коэффициентов таким образом, чтобы при подаче на ее вход вектора совокупности используемых признаков одного из L классов на ее выходе сформировался двоичный вектор, максимально близкий к целевому вектору именно этого класса. Таким образом, в процессе реального распознавания сигнал логической единицы появляется только на том выходе первого НСК, который соответствует распознанному классу ВО. Например, при принадлежности ВО к 3-му классу сигнал логической единицы будет получен на 3-м выходе блока 35: «0 0 1 0 0». Такой двоичный код поступает на входы с первого по L-й цифрового коммутатора 36.
Сигнал с l-го выхода первого НСК 35 поступает только на l-й вход блока 36. Цифровой коммутатор 36 по информации с выходов первого НСК 35 осуществляет коммутацию выходов ОЗУ со входами соответствующего второго НСК 37. Причем если в прототипе вход l-го второго НСК коммутировался с одним выходом ОЗУ 34, то в данной РЛС все четыре функционально различающихся выхода ОЗУ 34 соединяются с соответствующими входами определенного второго НСК 37. Если на первом этапе ВО отнесен к l-му классу, то (L+1)-й выход ОЗУ 34 будет соединен с первым входом l-го второго НСК, (L+2)-й выход ОЗУ 34 - со вторым входом l-го второго НСК, (L+3)-й выход ОЗУ 34 - с третьим входом l-го второго НСК, (L+4)-й выход ОЗУ 34 - с четвертым входом l-го второго НСК. Поскольку первый НСК 35 требует для выработки решения определенного времени, то должно существовать устройство, обеспечивающее неизменность информации распознавания в течение этого времени. Таким устройством является ОЗУ 34.
Каждый из вторых НСК 37 должен быть заблаговременно обучен идентификации Z типов воздушных объектов в своем конкретном классе. Число блоков 37 соответствует числу распознаваемых классов L. При принятии решения в пользу первого класса выходы ОЗУ 34 коммутируются с соответствующими входами первого по счету второго НСК 37. При принятии решения в пользу второго класса выходы ОЗУ 34 коммутируются со входами второго по счету второго НСК 37 и т.д. Блоки 37 являются НСК второго уровня, а точнее нейросетевыми идентификаторами, так как они предназначены для проведения идентификации (определения типа) ВО по совокупности 4-х признаков: вектору ДП; высоте полета ВО Н; усредненной ЭПР объекта σср и полной скорости движения Vц. Из теории распознавания известно, что применение расширенной совокупности признаков ведет к росту средней вероятности правильной идентификации [2]. Поэтому для идентификации и предлагается в данном случае пополнить информацию распознавания тремя информативными признаками: Н, σср и Vц. Их значения поступают совместно с вектором ДП на входы l-го второго НСК. При наличии на входах сигналов со значениями признаков один из вторых НСК начинает проводить идентификацию. Остальные блоки 37 в это время не функционируют.
Нейросетевые классификаторы, используемые в устройстве двухуровневого распознавания 39, могут быть построены по принципу скрещивания подсетей в комплексную ИНС. При таком подходе каждая подсеть является наилучшей в отношении конкретного признака, а в выходных слоях нейронов частные решения объединяются в общее по специальным правилам, соответствующим структуре комплексной ИНС. Примеры ИНС, построенных на основе скрещивания, приведены в [22].
Информация о типе воздушного объекта с выходов назначенного для идентификации второго НСК поступает на вход ТВРР 38, которое выводит эту информацию в виде надписи на мониторе или изображения образа ВО для зрительного восприятия потребителями (операторами РЛС).
Информация распознавания, полученная с помощью предложенной РЛС, может использоваться, например, для обеспечения высокого качества функционирования системы ОВД.
Как видно из описания, предложенная схема радиолокационной станции с перестройкой частоты, инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием объектов по совокупности признаков обладает преимуществом по сравнению с прототипом [4], что выражается в увеличении потенциальных возможностей РЛС по классификации и идентификации ВО за счет расширения используемого признакового пространства.
Источники информации
1. Патент РФ №2152626. МПК7 G01S 13/90. РЛС с инверсным синтезированием апертуры и многочастотным зондирующим сигналом. Митрофанов Д.Г., Силаев Н.В. Приоритет 17.05.1999 г. Опубл. 10.07.2000 г. БИ №19. 2000, Часть 3. с.547 (аналог).
2. Селекция и распознавание на основе локационной информации. А.Л.Горелик, Ю.Л.Барабаш, О.В.Кривошеев, С.С.Эпштейн / Под ред. А.Л.Горелика. М.: Радио и связь, 1990. 240 с.
3. Вопросы статистической теории распознавания / Под ред. Б.В.Варского. М.: Сов. радио, 1967. 399 с.
4. Патент РФ №2358288. МПК7 G01S 13/90. Многочастотная РЛС с инверсным синтезированием апертуры и двухуровневым распознаванием цели. Сафонов А.В., Митрофанов Д.Г. Приоритет 29.10.2007 г. Опубл. 10.06.2009 г. БИ №16 (прототип).
5. Радиоприемные устройства. Учебное издание / Под ред. А.П.Жуковского. М.: Высшая школа, 1989. 342 с.
6. Радиолокационные станции воздушной разведки / Под ред. Г.С.Кондратенкова. М.: Воениздат, 1983. 152 с.
7. Теоретические основы радиолокации / Под ред. В.Е.Дулевича. М.: Сов. радио, 1978. 608 с.
8. Финкельштейн М.И. Основы радиолокации. М.: Радио и связь, 1983. 536 с.
9. Теоретические основы радиолокации / Под ред. В.Е.Дулевича. М.: Сов. радио, 1964. 732 с. (рис.7.23, с.323).
10. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение, 1978. 736 с.
11. Коновалов Г.Ф. Радиоавтоматика. Учеб. для вузов по спец. «Радиотехника». М.: Высшая школа, 1990. 335 с.
12. Артемьев В.М., Яшугин Е.А. Основы автоматического управления систем радиоэлектронных средств. М.: Воениздат, 1984. 456 с.
13. Справочник по основам радиолокационной техники / Под ред. В.В.Дружинина. М.: Воениздат, 1967. 768 с.
14. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М.: Радио и связь, 1986.
15. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. 152 с.
16. Митрофанов Д.Г. Способ повышения точности и достоверности формируемых доплеровских портретов и радиолокационных изображений целей // Радиоэлектроника, 1998, №11, с.28-34 (Изв. высш. учеб. заведений).
17. Митрофанов Д.Г., Сафонов А.В. Применение вейвлет-анализа для сохранения информативности дальностных портретов воздушных целей при повышении уровня шумов // Электромагнитные волны и электронные системы, 2005, №9, с.19-24.
18. Радиолокационные устройства (теория и принципы построения) / Под редакцией В.В.Григорина-Рябова. М.: Сов. радио, 1970. 680 с.
19. Нейрокомпьютеры и их применение. Нейрокомпьютеры в системах обработки изображений / Под ред. Ю.В.Гуляева и А.И.Галушкина. М.: Радиотехника, 2003. Книга 7, с.47-55.
20. Головко В.А. Нейронные сети: обучение, организация и применение / Под ред. А.И.Галушкина. - М.: ИПРЖР, 2001. 256 с.
21. Распознавание, автодиагностика, мышление. Синергетика и наука о человеке / Под ред. Д.С.Чернавского. М.: Радиотехника, 2004, с.68-89.
22. Хомич А.В., Степанян И.В., Карпишук А.В. Принцип блочности в эволюционной оптимизации структур нейронных сетей // Нейрокомпьютеры, 2006, №3, с.17-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 2009 |
|
RU2407033C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| Способ устранения негативного влияния неравномерности частотной характеристики антенной системы | 2022 |
|
RU2784887C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
Изобретение относится к радиолокационной технике и может быть использовано в радиолокационной станции (РЛС) с перестройкой несущей частоты при классификации и идентификации сопровождаемых воздушных объектов на основе выделения различных траекторных и сигнальных признаков распознавания. Достигаемый технический результат - повышение достоверности разделения воздушных объектов на классы и их последующей идентификации в пределах установленного класса за счет использования в нейросетевом идентификаторе расширенной совокупности признаков, а также за счет двухуровневого построения схемы. Указанный результат достигается на основе введения в состав известного устройства - блока выделения высоты, блока выделения эффективной площади рассеяния и блока выделения полной скорости полета воздушного объекта с соответствующим изменением межблочных связей. Нейросетевые классификаторы, используемые в устройстве двухуровневого распознавания РЛС, предлагается синтезировать по принципу скрещивания подсетей в комплексную искусственную нейронную сеть. При таком подходе каждая подсеть является наилучшей в отношении конкретного признака, а в выходных слоях нейронов частные решения объединяются в общее по специальным правилам, соответствующим структуре комплексной нейронной сети. 1 ил.
Радиолокационная станция с перестройкой частоты, инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием объектов по совокупности признаков, состоящая из четырех аналого-цифровых преобразователей, второго усилителя мощности, связанного своим выходом с входом азимутального привода, первый выход которого связан со вторым входом антенны, вход-выход которой связан с первым входом-выходом моноимпульсного облучателя, а первый вход - с первым выходом угломестного привода, вход которого соединен с выходом первого усилителя мощности, связанного входом с выходом первого фазового детектора, второй вход которого связан с выходом блока элементов линейной части приемника суммарного канала, входом амплитудного детектора, первым входом третьего фазового детектора, первым входом системы измерения скорости и вторым входом второго фазового детектора, а первый вход - с выходом блока элементов линейной части приемника разностного угломестного канала, второй вход которого связан с первым выходом первого ключа, вторым входом блока элементов линейной части приемника разностного азимутального канала, вторым входом блока элементов линейной части приемника суммарного канала, а первый вход - с первым выходом моноимпульсного облучателя, второй вход-выход которого соединен с входом-выходом антенного переключателя, а второй выход - с первым входом блока элементов линейной части приемника разностного азимутального канала, выход которого связан с первым входом второго фазового детектора, выход которого связан с входом второго усилителя мощности, кроме того, выход амплитудного детектора соединен с первым входом второго ключа и вторым входом системы измерения дальности, соединенной своим выходом с входом первого аналого-цифрового преобразователя, а также включающая задающий генератор, подключенный выходом к первому входу первого ключа, соединенного вторым входом со вторым выходом схемы управления, предназначенной для формирования управляющих сигналов, а вторым выходом - с первым входом смесителя, соединенного выходом с входом когерентного передатчика, подключенного выходом к входу антенного переключателя, выход которого связан с первым входом блока элементов линейной части приемника суммарного канала, причем второй вход смесителя подключен ко второму входу схемы электронной задержки и выходу синтезатора частоты на поверхностных акустических волнах, вход которого связан с первым выходом схемы управления, связанной своим входом с первым выходом пульта управления оператора, второй выход которого подключен ко вторым входам второго и третьего ключей, а своим третьим выходом схема управления подключена к первому входу системы измерения дальности, при этом выход второго ключа соединен с входом второго аналого-цифрового преобразователя, выход которого подключен к первому входу блока компенсации поступательного движения объекта, предназначенного для расчета результирующего значения фазы, обусловленного поступательным движением объекта и начальной дальностью до объекта, а выход третьего фазового детектора подключен к первому входу третьего ключа, соединенного своим выходом с входом третьего аналого-цифрового преобразователя, выход которого подключен ко второму входу блока компенсации поступательного движения объекта, причем выход первого аналого-цифрового преобразователя подключен к третьему входу блока компенсации поступательного движения объекта и к первому входу схемы электронной задержки, которая своим выходом подключена ко второму входу третьего фазового детектора и ко второму входу системы измерения скорости, которая своим выходом подключена к входу четвертого аналого-цифрового преобразователя, который своим выходом подключен к четвертому входу блока компенсации поступательного движения объекта, выход которого соединен с входом накопительного буфера, выход которого связан с входом блока обратного преобразования Фурье, выход которого подключен к первому входу оперативного запоминающего устройства и первому входу первого нейросетевого классификатора, выходы с первого по L-й которого подключены к соответствующим с первого по L-й входам цифрового коммутатора, (L+1)-й вход которого связан с первым выходом оперативного запоминающего устройства, а каждый l-й первый выход подключен к первому входу соответствующего l-го второго нейросетевого классификатора, каждый из которых имеет Z выходов, z-й выход l-го второго нейросетевого классификатора связан с [(l-1)Z+z]-M входом табло вывода результатов распознавания, при этом накопительный буфер, блок обратного быстрого преобразования Фурье, оперативное запоминающее устройство, первый нейросетевой классификатор, цифровой коммутатор, L вторых нейросетевых классификаторов и табло вывода результатов распознавания структурно объединены в устройство двухуровневого распознавания, отличающаяся тем, что в состав радиолокационной станции с перестройкой частоты, инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием объектов по совокупности признаков дополнительно включают блок выделения высоты, блок выделения эффективной площади рассеяния, блок выделения скорости, при этом первый вход блока выделения высоты подключают ко второму выходу угломестного привода, второй вход - к выходу первого аналого-цифрового преобразователя, а выход - к третьим входам оперативного запоминающего устройства и первого нейросетевого классификатора, причем первый вход блока выделения эффективной площади рассеяния подключают к выходу первого аналого-цифрового преобразователя, второй вход - к выходу второго аналого-цифрового преобразователя, а выход - ко вторым входам оперативного запоминающего устройства и первого нейросетевого классификатора, при этом первый вход блока выделения скорости подключают к выходу четвертого аналого-цифрового преобразователя, второй вход - ко второму выходу привода азимутального, третий вход - ко второму выходу привода угломестного, четвертый вход - к выходу первого аналого-цифрового преобразователя, а выход - к четвертым входам оперативного запоминающего устройства и первого нейросетевого классификатора, причем с второго по четвертый выходы оперативного запоминающего устройства подключают к соответствующим с (L+2)-го по (L+4)-й входам цифрового коммутатора, а каждый l-й второй выход цифрового коммутатора подключают к второму входу соответствующего l-го второго нейросетевого классификатора, каждый l-й третий выход цифрового коммутатора подключают к третьему входу соответствующего l-го второго нейросетевого классификатора, а каждый l-й четвертый выход цифрового коммутатора соединяют с четвертым входом соответствующего l-го второго нейросетевого классификатора.
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| RU 2007142159 A, 27.05.2009 | |||
| US 5402131 A, 28.03.1995 | |||
| US 5563601 A, 08.10.2006 | |||
| JP 6125875 A, 12.11.1986. | |||

