Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления перегрузочным устройством, установленным на уборочной машине с возможностью поворота вокруг вертикальной оси и горизонтальной оси, при котором перегрузочное устройство автоматически поворачивают вокруг вертикальной оси из одного из текущих положений в положение над расположенной на уборочной машине транспортной опорой, предназначенной для перегрузочного устройства. Кроме того, изобретение относится к соответствующему устройству для управления перегрузочным устройством и к уборочной машине, содержащей такое устройство.
Уровень техники
Самоходные уборочные машины, такие как полевые измельчители, зерноуборочные комбайны, машины для уборки сахарной свеклы и подобные агрегаты, обычно оснащены перегрузочным устройством, - например, разгрузочной трубой, разгрузочным желобом зернового бункера, конвейерной цепью или транспортерной лентой. С помощью этого перегрузочного устройства убранная масса перегружается из уборочной машины в транспортное средство, движущееся рядом. Для этого перегрузочное устройство посредством поворота вокруг вертикальной и горизонтальной осей может быть позиционировано в рабочее положение таким образом, что выбрасываемый или разгружаемый поток убранной массы падает на транспортное средство в желаемом месте. Обычно перегрузочное устройство в рабочем положении выступает поперечно за габарит уборочной машины. Это не создает проблем на рабочей территории, то есть на поле. Однако при движении по дорогам на пути к месту эксплуатации и на обратном пути такой выход перегрузочного устройства за пределы габаритной ширины машины недопустим по условиям безопасности. Поэтому для транспортного движения перегрузочное устройство должно быть переведено в транспортное положение, в котором его, как правило, поворачивают назад. Кроме того, для того, чтобы вписаться в допустимый высотный габарит, перегрузочное устройство должно быть также повернуто вниз. Для этого в известных уборочных машинах имеется опорное седло или транспортная опора, на которую перегрузочное устройство укладывается в транспортном положении.
Процесс укладки перегрузочного устройства в транспортное положение, как правило, выполняется водителем вручную таким образом, что он поворачивает перегрузочное устройство вокруг вертикальной оси и затем опускает его до положения над транспортной опорой. При этом водитель должен все время наблюдать за перегрузочным устройством и обеспечить его плавную укладку в точное положение, чтобы не повредить транспортную опору или перегрузочное устройство. Однако эта область, за которой должен наблюдать водитель, находится за кабиной, что делает крайне неудобным одновременное наблюдение и управление движением перегрузочного устройства. Кроме того, трудно позиционировать перегрузочное устройство точно над транспортной опорой, так чтобы при опускании больше не требовались корректировки угла поворота вокруг вертикальной оси.
В патентном документе ФРГ №4403893 А1 описано устройство управления перегрузочным устройством, в котором водитель с помощью простого поворотного переключателя может повернуть перегрузочное устройство и установить его в три различных положения - рабочее положение на левой стороне, рабочее положение на правой стороне и третье положение над транспортной опорой. Однако этот поворотный переключатель приводит в действие только клапаны управления горизонтальным поворотом перегрузочного устройства. Поэтому водитель должен, как и прежде, путем ручного управления осторожно опускать перегрузочное устройство на транспортную опору, одновременно наблюдая за перегрузочным устройством.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании альтернативного решения, которое позволяет облегчить для водителя и сделать более надежным способ позиционирования перегрузочного устройства в транспортное положение.
В соответствии с изобретением решение поставленной задачи достигается за счет создания способа в соответствии с пунктом 1 формулы изобретения и устройства в соответствии с пунктом 12 формулы изобретения и уборочной машины в соответствии с пунктом 17 формулы изобретения. При этом согласно изобретению перегрузочное устройство полностью автоматически опускается на транспортную опору в ходе управляемого по событию или условию процесса позиционирования в транспортное положение.
В качестве события или условия для начала, т.е. для инициирования процесса позиционирования перегрузочного устройства может использоваться управляющая команда позиционирования в транспортное положение, вводимая водителем с помощью устройства пользовательского интерфейса. Это означает, что для этого водитель, например, нажимает определенную клавишу или переводит переключатель. В этом случае водитель должен проследить только за тем, что процесс позиционирования перегрузочного устройства в транспортное положение выполняется вообще, и ему не нужно заботиться о том, чтобы повернуть перегрузочное устройство в нужное положение и осторожно опустить его.
Для надежного автоматического управления перегрузочным устройством на транспортной опоре устройство по изобретению предпочтительно должно содержать средства управления с соответствующими средствами определения положения, с помощью которых могут быть определены данные текущего положения перегрузочного устройства. Здесь может идти речь о датчиках положения, которые измеряют угол поворота вокруг вертикальной или горизонтальной оси. Однако эти средства могут также представлять собой в чистом виде средства программного обеспечения, которые осуществляют совместное протоколирование управляющих команд или сигналов регулировки, вызывающих поворот перегрузочного устройства, и на основе этих протоколируемых данных определяют точное текущее положение. Кроме того, средства управления должны быть выполнены таким образом, что в ходе автоматического процесса позиционирования в транспортное положение, в зависимости от текущего положения перегрузочного устройства и предварительно заданного транспортного положения, то есть на основе записанных в памяти данных транспортного положения, выдаются соответствующие сигналы регулировки на устройство регулировки угла поворота для поворота перегрузочного устройства вокруг вертикальной оси, а также соответствующие сигналы регулировки на устройство регулировки высотного положения для вертикального поворота перегрузочного устройства вокруг горизонтальной оси.
В особенно предпочтительном примере выполнения начало или инициирование процесса позиционирования в транспортное положение автоматически связано с определенными режимами эксплуатации или определенными параметрами, то есть рабочими показателями машины. Это создает преимущество в том, что по окончании уборки при переезде с поля на дорогу водитель не должен помнить о необходимости поворота перегрузочного устройства в транспортное положение. За счет этого значительно снижается опасность повреждения перегрузочного устройства или каких-либо объектов при транспортном движении машины с перегрузочным устройством, выступающим за ее габарит.
Для обеспечения указанного автоматического инициирования процесса устройство предпочтительно снабжено устройством обработки данных, которое обрабатывает входящие управляющие команды для управления уборочной машиной и/или сигналы состояния, которые представляют определенные режимы эксплуатации и/или определенные рабочие показатели уборочной машины, и при определенных управляющих командах и/или сигналах состояния или комбинации вышеназванных команд и/или сигналов инициирует процесс позиционирования в транспортное положение. Поскольку для включения определенного режима эксплуатации в любом случае вначале должна подаваться соответствующая управляющая команда, например, от устройства пользовательского интерфейса, на соответствующие устройства уборочной машины, то предполагается, что такая управляющая команда может быть распознана устройством обработки данных как событие или условие инициирования процесса. В том случае, когда использование таких управляющих команд невозможно, поскольку речь идет о рабочих показателях машины, таких как пройденное расстояние, скорости и другие показатели, то предпочтительно регистрируются и привлекаются для обработки соответствующие сигналы состояния машины, например, сигналы датчиков пройденного пути или скорости движения.
Автоматическое позиционирование в транспортное положение может быть связано, например, со следующими режимами эксплуатации или их комбинациями.
Одной из возможностей является автоматическое инициирование процесса позиционирования в транспортное положение при включении так называемого выключателя разрешения движения вперед. С помощью этого выключателя разрешения движения вперед, называемого также "TUV-выключатель", отключается и запирается вся рабочая гидравлическая система. Этот выключатель включают в соответствии с инструкцией для того, чтобы при транспортном движении предотвратить случайное перемещение или привод жатвенного аппарата или других механизмов.
Другая возможность заключается в автоматическом инициировании процесса позиционирования в транспортное положение, когда выключается главный привод рабочего аппарата уборочной машины, например, привод измельчительного барабана полевого измельчителя или молотильного барабана зерноуборочного комбайна.
Альтернативно или дополнительно инициирование процесса позиционирования в транспортное положение может быть связано с включением передачи транспортного хода уборочной машины, то есть при переключении привода передвижения машины на вторую передачу более быстрого хода. Для того, чтобы перегрузочное устройство не переводилось в транспортное положение в нежелательных случаях, когда водитель в порядке исключения хочет переключить рабочий ход на более скоростную передачу, для инициирования процесса позиционирования в транспортное положение предпочтительно используется переключение на транспортный ход только в комбинации, например, с включением выключателя разрешения движения вперед.
Для предотвращения ситуации, когда во время автоматического поворота в транспортное положение на уборочной машине в области поворота перегрузочного устройства находится еще один человек, и перегрузочное устройство может его ударить, в целях безопасности предпочтительно может быть предусмотрено инициирование процесса позиционирования в транспортное положение только после истечения определенного промежутка времени движения уборочной машины и/или после того, как она прошла определенный участок пути.
Особенно целесообразными являются комбинации событий или условий, при которых исходят из того, что рабочий процесс уборки закончен и машину подготавливают к транспортному движению. Такими комбинациями являются:
- выключение главного привода и движение машины, в необходимых случаях после прохождения минимального пути или по истечении минимального промежутка времени движения;
- включение передачи транспортного хода и выключателя разрешения движения вперед.
Перевод перегрузочного устройства из рабочего положения в транспортное положение может осуществляться в два этапа, при этом, например, на первом этапе перегрузочное устройство вначале поворачивают в положение над транспортной опорой и на следующем этапе опускают. Альтернативно скоординированным образом может производиться одновременное опускание перегрузочного устройства и его поворот вокруг вертикальной оси для перемещения по наиболее короткому пути из рабочего положения в положение на транспортной опоре.
В обоих вариантах предпочтительно скорость поворота вокруг вертикальной оси и вокруг горизонтальной оси регулируется в зависимости от расстояния между текущим положением перегрузочного устройства и конечным положением назначения данного перемещения.
В предпочтительном примере выполнения на транспортной опоре расположен концевой выключатель, который приводится в действие при укладке перегрузочного устройства в транспортное положение. За счет этого прекращается процесс позиционирования в транспортное положение. Сигнал концевого выключателя может быть при этом предпочтительно использован для поверки средств определения положения.
В том случае, когда на перегрузочном устройстве на его выпускной стороне находится разгрузочный дефлектор, как это имеет место, например, в разгрузочной трубе полевого измельчителя, в процессе процесса позиционирования в транспортное положение этот разгрузочный дефлектор предпочтительно также автоматически переводится в нерабочее положение, например в горизонтальное вытянутое положение.
Перегрузочное устройство может быть выполнено из нескольких секций, соединенных между собой в направлении горизонтальных осей. В этом случае в процессе позиционирования в транспортное положение может осуществляться индивидуальный поворот отдельных секций вокруг соответствующих горизонтальных осей для укладки перегрузочного устройства на транспортную опору.
Перечень чертежей
Примеры осуществления настоящего изобретения, его дополнительные особенности и преимущества будут подробнее описаны ниже со ссылками на прилагаемые чертежи, на которых:
фиг.1 схематично изображает на виде сбоку полевой измельчитель с повернутой назад разгрузочной трубой в двух различных положениях,
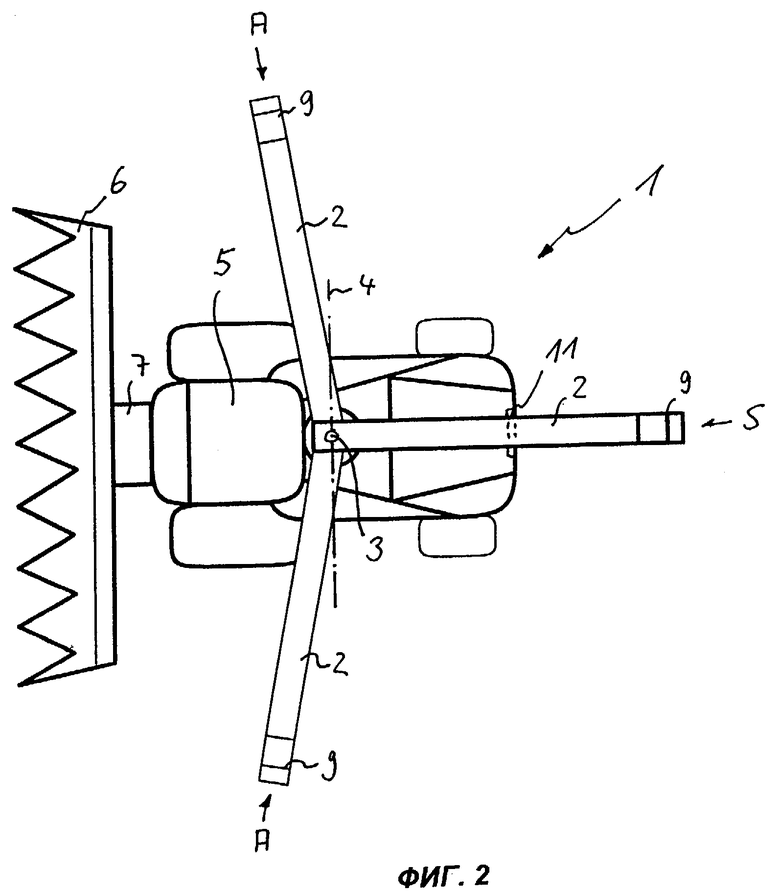
фиг.2 схематично изображает полевой измельчитель по фиг.1 на виде сверху, показывая разгрузочную трубу в правом и левом рабочих положениях и в транспортном положении,
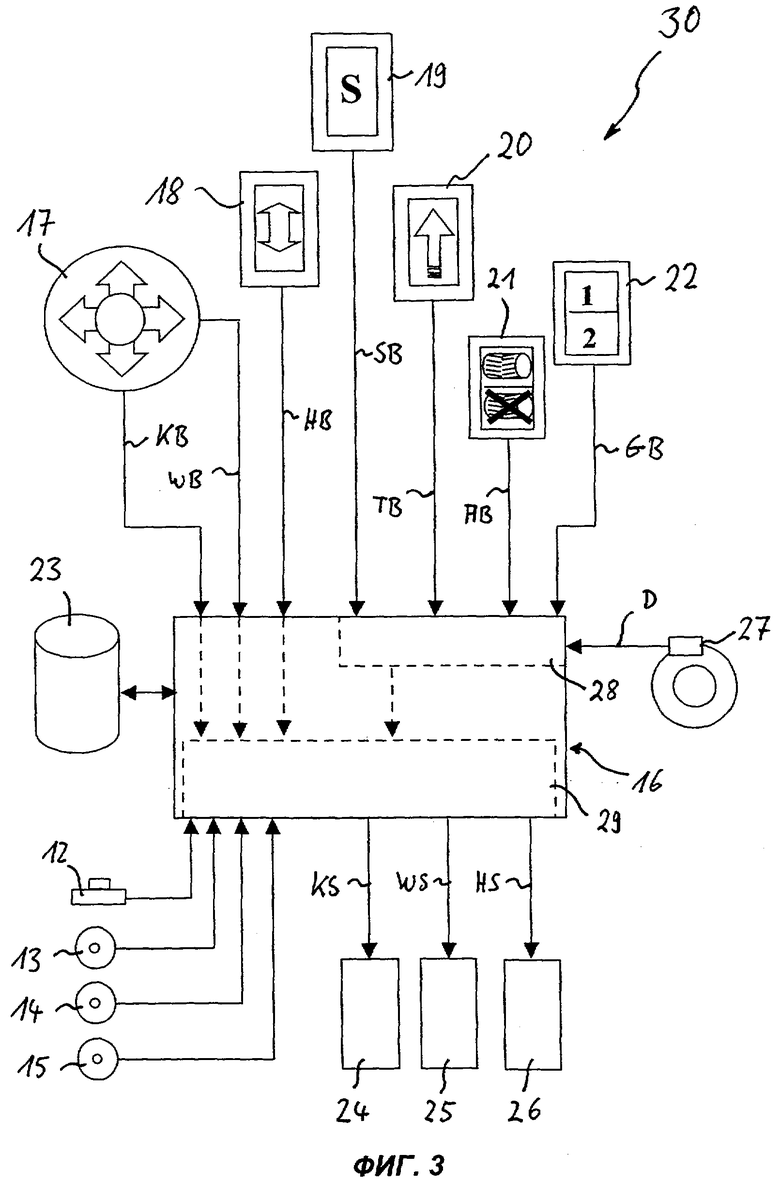
фиг.3 изображает схему системы управления разгрузочной трубой полевого измельчителя по фиг.1 и 2 в электронном примере осуществления устройства управления.
Осуществление изобретения
На фиг.1 и 2 показана уборочная машина в виде обычного полевого измельчителя 1. В рабочем процессе подлежащая уборке растительность срезается с помощью переднего уборочного аппарата 6, например приставки для уборки кукурузы, и направляется через приемное устройство 7 внутрь полевого измельчителя 1. Растительность измельчается на измельчительном барабане (не показан), и измельченная убранная масса в заключение перегружается посредством перегрузочного устройства, в данном случае разгрузочной трубы 2, в транспортное средство (не показано), которое во время уборки следует, например, параллельно рядом с полевым измельчителем 1. Разгрузочная труба 2 расположена известным образом непосредственно за кабиной 5 водителя полевого измельчителя 1 и установлена с возможностью поворота вокруг вертикальной оси 3 поворота и, для целей изменения высотного положения, с возможностью поворота вокруг горизонтальной оси 4.
На выпускном конце разгрузочной трубы 2 расположен разгрузочный дефлектор 9, регулируемый с помощью гидроцилиндра 10. За счет регулировки разгрузочного дефлектора 9 может регулироваться дальность разгрузки, то есть расстояние между находящимся на полевом измельчителе входным концом разгрузочной трубы 2 и точкой падения потока убранной массы в транспортное средство. Если разгрузочный дефлектор 9 поворачивают вниз, дальность разгрузки становится меньше при том же отрегулированном высотном положении разгрузочной трубы 2, чем при повернутом вверх разгрузочном дефлекторе 9.
На фиг.2 разгрузочная труба 2 показана в транспортном положении и в предпочтительных рабочих положениях А, в которых она повернута соответственно вправо и влево и расположена косо с поворотом вперед. Кроме показанных на фиг.2 рабочих положений А разгрузочная труба 2 может занимать также любые другие положения перегрузки в зависимости от места нахождения транспортного средства. В частности, когда в процессе уборки транспортное средство следует за полевым измельчителем 1, разгрузочная труба 2 может занимать положение А по фиг.1, в котором она проходит назад над транспортной опорой 11.
Фиг.3 изображает систему 30 устройства управления в электронном примере выполнения. Центральная часть устройства образована вычислительным блоком 16, например, микроконтроллером, который получает через устройства пользовательского интерфейса (далее - устройства интерфейса), оснащенного различными клавишами и переключателями 17, 18, 19, 20, 21, 22, вводимые пользователем управляющие команды KB, WB, HB, SB, ТВ, АВ, GB.
Одной из этих клавиш является нажимная клавиша 18 для изменения высотного положения разгрузочной трубы 2 посредством ее поворота вокруг горизонтальной оси 4. В зависимости от того, вверх или вниз переводит эту клавишу водитель, на вычислительный блок 16 передается соответствующая управляющая команда НВ регулировки высотного положения. Кроме того, в устройствах интерфейса предусмотрена многопозиционная клавиша 17, которая может наклоняться в 4-х направлениях. Эта многопозиционная клавиша 17 может быть соединена, например, с многофункциональной ручкой (типа джойстика), так что водитель может просто управлять ею с помощью большого пальца руки. При смещении вправо или влево вырабатывается соответствующая управляющая команда WB для поворота разгрузочной трубы 2 вправо или влево вокруг вертикальной оси 3. При смещении многопозиционной клавиши 17 вверх или вниз вырабатывается соответствующая управляющая команда KB для регулировки разгрузочного дефлектора 9 со смещением вверх или вниз. Расположение направлений на переключающей клавише 18 и многопозиционной клавише 17 выбирают таким образом, что водитель интуитивно смещает ее в нужном направлении.
Поступающие управляющие команды KB, WB, HB вначале обрабатываются в вычислительном блоке 16. Затем вычислительный блок 16 выдает соответствующий сигнал KS, WS, HS регулировки на устройство 26 регулировки высотного положения, устройство 25 регулировки угла поворота или устройство 24 регулировки положения разгрузочного дефлектора. В данном случае устройство 26 регулировки высотного положения и устройство 24 регулировки положения разгрузочного дефлектора выполнены в виде гидравлических клапанов, которые управляют соответственно гидроцилиндрами 8, 10 поворота разгрузочной трубы 2 вокруг горизонтальной оси 4 и поворота разгрузочного дефлектора 9 относительно разгрузочной трубы 2. Эти два гидроцилиндра 8, 10 для регулировки высотного положения разгрузочной трубы 2 и регулировки разгрузочного дефлектора 9 на конце разгрузочной трубы 2 хорошо видны на фиг.1. Что касается устройства 25 регулировки угла поворота для поворота разгрузочной трубы 2 вокруг вертикальной оси 3, оно, как правило, представляет собой гидронасос (не показан) с электрогидравлическим управлением, который передает на гидравлический двигатель 32 определенное количество масла. В свою очередь гидравлический двигатель 32 с помощью червячного колеса зацепляется с турелью или поворотным кругом 31 разгрузочной трубы 2 и таким путем поворачивает разгрузочную трубу 2 вокруг вертикальной оси 3. Однако вместо гидравлического двигателя может использоваться также шаговый двигатель или подобное устройство, которое управляется непосредственно поступающими электрическими сигналами регулировки.
Само собой разумеется, что выходные сигналы KS, WS, HS регулировки от вычислительного блока 16 до поступления их на соответствующие регулировочные устройства 24, 25, 26 должны быть преобразованы, например, из цифровой в аналоговую форму. То же самое относится к поступающим от устройств интерфейса управляющим командам, которые должны быть преобразованы для вычислительного блока 16 из аналоговой в цифровую форму. Требуемые для этого устройства здесь не представлены для большей ясности. Они могут быть частями в составе вычислительного блока 16 или же частями устройств интерфейса или регулировочных устройств 24, 25, 26. Может идти речь также об отдельных устройствах, включенных в схему между устройствами интерфейса, и/или между вычислительным блоком 16 и соответствующими регулировочными устройствами 24, 25, 26.
Собственно устройство 29 управления как таковое представлено внутри вычислительного блока 16 в форме программного обеспечения. Поэтому на фиг.3 оно представлено в виде программного модуля 29, показанного штриховыми линиями. Это устройство 29 управления в электронной системе 30 управления на основе задаваемых пользователем управляющих команд KB, WB, НВ с учетом других данных управляет отдельными соответствующими регулировочными устройствами 24, 25, 26, то есть оно преобразует управляющие команды KB, WB, НВ в сигналы KS, WS, HS регулировки для регулировочных устройств 24, 25, 26.
Для того, чтобы при поворотной регулировке обеспечивать возможность учета текущих данных положения разгрузочной трубы 2 и разгрузочного дефлектора 9, в соответствующих местах разгрузочной трубы 2 или разгрузочного дефлектора 9 установлены датчики 13, 14, 15 положения, которые регистрируют текущие положения и передают соответствующие сигналы положения на вычислительный блок 16. В частности, в данном примере выполнения датчики представляют собой потенциометр 15 для определения положения разгрузочного дефлектора, потенциометр 14 для определения углового положения поворота разгрузочной трубы 2 вокруг горизонтальной оси 4 и потенциометр 13 для определения угла поворота вокруг вертикальной оси 3. В альтернативном варианте получение и временная регистрация в памяти данных текущего положения могут осуществляться средствами программного обеспечения, например, путем совместного протоколирования сигналов входящих управляющих команд KB, WB, НВ или выходных сигналов KS, WS, HS регулировки.
Полностью автоматизированное позиционирование в транспортное положение осуществляется с помощью устройства 29 управления следующим образом. Вначале определяются текущие положения разгрузочной трубы 2 и разгрузочного дефлектора 9 по сигналам положения, получаемым от датчиков 13, 14, 15 положения. Кроме того, из запоминающего устройства 23 вызываются данные транспортного положения, то есть данные положения транспортной опоры 11. Далее выдаются соответствующие сигналы HS и WS на устройство 26 регулировки высотного положения и устройство 25 регулировки угла поворота, так что разгрузочная труба 2 предпочтительно наиболее коротким путем поворачивается из текущего положения А в транспортное положение S. В этом процессе в зависимости от еще оставшегося расстояния до транспортного положения S, то есть в зависимости от приближения к конкретным конечным положениям назначения, производится управление скоростью поворота вокруг вертикальной оси 3 и горизонтальной оси 4. При этом вначале разгрузочная труба 2 поворачивается относительно быстро вокруг вертикальной оси 3, до приближения к положению над транспортной опорой 11, а затем осуществляется более медленное приближение к точному положению. Таким же образом разгрузочная труба 2 вначале относительно быстро поворачивается вниз вокруг горизонтальной оси 4, а затем ее скорость замедляется тем больше, чем ближе она находится к транспортной опоре 11, так что в заключение разгрузочная труба 2 плавно опускается на транспортную опору 11.
На транспортной опоре 11 расположен также концевой выключатель 12, который включается при укладке разгрузочной трубы 2 на транспортную опору 11. Этот концевой выключатель 12 подает сигнал на вычислительный блок 16, и устройство 29 управления прерывает операцию позиционирования. Концевой выключатель 12 служит прежде всего дополнительным предохранителем, так как в устройстве 29 управления и без него в каждый данный момент известны данные текущего положения, получаемые от датчиков 13, 14, 15 положения.
В дополнение к автоматическому повороту разгрузочной трубы вокруг вертикальной оси 3 и горизонтальной оси 4 выдается также сигнал KS регулировки на устройство 24 регулировки разгрузочного дефлектора для перевода разгрузочного дефлектора 9 в вытянутое нерабочее положение, показанное на фиг.1.
Для запуска процесса автоматического позиционирования в транспортное положение электронная система 30 управления содержит устройство 28 обработки данных. Это устройство 28 обработки данных в данном примере выполнения также представлено внутри вычислительного блока 16 в форме программного обеспечения, при этом оно может быть выполнено в виде подпрограммы устройства 29 управления. Устройство 28 обработки данных обрабатывает различные управляющие команды SB, ТВ, АВ, GB или сигналы D состояния машины 1, подводимые к вычислительному блоку 16.
К командам, которые должны учитываться устройством 28 обработки данных, относятся команда ТВ разрешения движения вперед при включении выключателя 20 разрешения движения вперед, команда АВ выключения при выключении главного привода измельчительного барабана с помощью выключателя 21 главного привода, а также команда GB выбора передачи при переключении с помощью переключателя 22 передач с первой передачи рабочего хода во время уборки на вторую передачу транспортного хода. Кроме того, обрабатывается также сигнал D состояния от датчика 27 скорости движения и/или пройденного пути, который представляет данные скорости движения полевого измельчителя 1. На основе этого сигнала D состояния устройством 28 обработки данных может быть вычислено время движения, прошедшее с момента последней остановки полевого измельчителя. Кроме того, может быть вычислено также пройденное расстояние.
Управляющие команды ТВ, АВ, GB, поступающие от выключателя 20 разрешения движения вперед, выключателя 21 главного привода и переключателя 22 передач, передаются также дальше непосредственно на исполнительные органы (не показаны) для проведения желаемых операций включения. Однако возможно также поступление управляющих команд вначале на вычислительный блок 16, где они обрабатываются и преобразуются в соответствующие выходные сигналы, передаваемые на соответствующие исполнительные органы.
Устройство 28 обработки данных запрограммировано таким образом, что при наступлении определенного события, которое определяется входящими управляющими командами ТВ, АВ, GB или сигналом D, то есть при определенных режимах эксплуатации и/или рабочих показателях машины или при определенных управляющих командах или их комбинациях, инициируется процесс автоматического позиционирования в транспортное положение. В данном примере осуществления устройство 28 обработки данных выполнено таким образом, что процесс автоматического позиционирования в транспортное положение инициируется в тех случаях, когда либо отключен главный привод измельчительного барабана, а уборочная машина 1 продолжает движение, причем пройден уже определенный участок пути, либо когда прошел определенный промежуток времени движения машины. В альтернативном варианте устройство 28 обработки данных инициирует процесс автоматического позиционирования в транспортное положение, когда установлена передача транспортного хода, то есть вторая передача, и кроме того, включен выключатель 20 разрешения движения вперед.
Наряду с этим автоматическим инициированием процесса возможно также волевое инициирование процесса автоматического позиционирования в транспортное положение водителем с помощью клавиши 19 управления позиционированием в транспортное положение, от которой на устройство 28 обработки данных подается соответствующая управляющая команда SB позиционирования в транспортное положение. В альтернативном примере выполнения эта управляющая команда SB может передаваться непосредственно на устройство 29 управления в обход устройства 28 обработки данных (не показано).
На автоматический режим управления в соответствии с изобретением в любой момент быть наложена приоритетная команда управления с помощью обычных клавиш 17, 18 управления положением разгрузочной трубы 2 и разгрузочного дефлектора 9, или же этот автоматический режим может быть отключен с помощью специальной клавиши или комбинации клавиш.
Следует еще раз отметить, что показанный на чертежах пример выполнения не является ограничивающим, и при осуществлении изобретения специалистами в данной области возможны различные изменения и модификации. Так, например, можно отказаться от использования дополнительного концевого выключателя 12. Далее, вместо специального датчика 37 скорости или пройденного пути может быть осуществлено подключение к обычному тахометру уборочной машины 1. Вычислительный блок 16 также может составлять часть более общего вычислительного устройства, которое обеспечивает управление другими дополнительными функциями и рабочими показателями эксплуатации уборочной машины 1.
Изобретения относятся к способу и устройству управления перегрузочным устройством (2), а также к уборочной машине. В способе управления перегрузочным устройством перегрузочное устройство (2) в ходе управляемого по событию или условию процесса позиционирования в транспортное положение автоматически опускают в транспортное положение (S) на транспортную опору (11), причем скорость поворота вокруг вертикальной оси (3) и вокруг горизонтальной оси (4) регулируют в зависимости от расстояния между текущим положением перегрузочного устройства (2) и конечным положением назначения данного перемещения. В устройстве управления перегрузочным устройством (2) средства управления выполнены с возможностью автоматического опускания перегрузочного устройства (2) в ходе управляемого по событию или условию процесса позиционирования в транспортное положение на транспортную опору (11) для перегрузочного устройства (2), расположенную на уборочной машине (1), и с возможностью регулирования скорости поворота вокруг вертикальной оси (3) и вокруг горизонтальной оси (4) в зависимости от расстояния между текущим положением перегрузочного устройства (2) и конечным положением назначения данного перемещения. Уборочная машина (1) содержит устройство для управления перегрузочным устройством (2). Технический результат заключается в более надежном позиционировании перегрузочного устройства в транспортное положение. 3 н. и 13 з.п. ф-лы, 3 ил.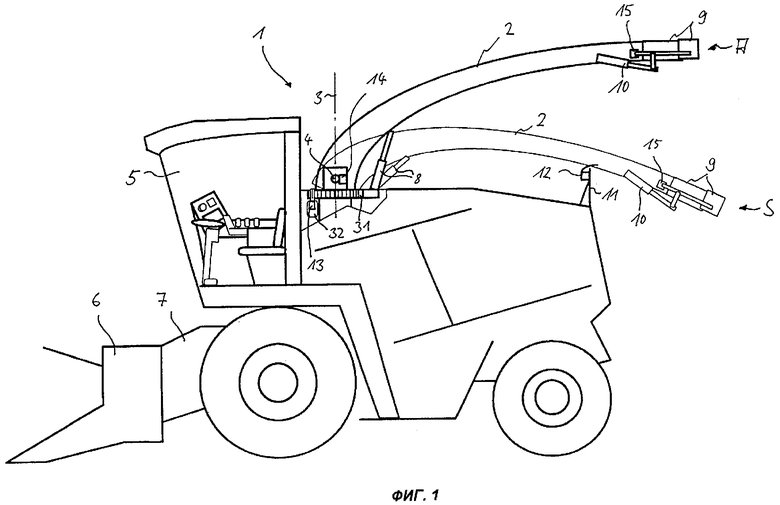
| DE 4403893 A1, 10.08.1995 | |||
| Распылитель жидкости | 1984 |
|
SU1219153A1 |
| US 2002083695 A1, 04.07.2002 | |||
| JP 10000015 A, 06.01.1998. | |||

