Изобретение относится к области сельского хозяйства, в частности к способам управления и устройствам подвода электроэнергии к мобильным подвижным сельскохозяйственным объектам, питающимся от централизованной электросети или автономного стационарного источника электроэнергии.
Известно устройство подвода электроэнергии к мобильным подвижным объектам, питающимся от централизованной электросети, включающее кабелеприемный барабан, питающий кабель, подсоединенный одним концом к источнику питания, а другим - к мобильному объекту [Стаценко В.Г. Электрификация мобильных процессов полеводства. Научные труды по электрификации сельского хозяйства ХХ. - М., 1967, с.261-300].
Наиболее близким по технической сущности к предлагаемому изобретению является устройствам подвода электроэнергии к мобильным подвижным сельскохозяйственным объектам, включающее консольно-поворотную стрелу, кабелеприемный барабан с электроприводом, питающий кабель, отличающийся тем, что в систему введены датчик скорости движения объекта, три датчика контроля усилия на питающий кабель, два программируемых задатчика уставки усилия на питающий кабель, два блока сравнения, логическое устройство управления, регулируемый привод перемещения консольно-поворотной стрелы, причем кабелеприемный барабан имеет вертикальную ось вращения, электропривод кабелеприемного барабана - регулируемый [Патент RU 2269854 С1 Кабельная система электроснабжения мобильного подвижного сельскохозяйственного объекта. - 10.02.2006, бюл. 4].
Недостатком известного технического решения является низкая надежность устройства, т.к. при прочном (требуется большое усилие для отрыва) зацеплении кабеля за растение или другой предмет за время реакции системы на возмущение возникают повреждения кабеля. Если эти возмущения кратковременны, возможны ложные срабатывания системы. Устройство при работе только ограничивает значения механических усилий на кабель допустимыми максимальными значениями, защита от наездов на кабель, когда усилие не превышает допустимые значения или когда усилия отсутствуют полностью (например, при обратном ходе подвижного объекта), не реализована. При этом сложно формализовать наилучшие для конкретных условий функционирования (неровности грунта, марка кабеля, параметры оборудования на борту объекта и др.) значения уставки контролируемых усилий, что уменьшает эффективность системы в целом. В общем случае осложненные условия эксплуатации современных технологических комплексов, к классу которых относятся рассматриваемые системы кабельного питания, приводят к необходимости учета при мониторинге и управлении объектом следующих видов неопределенности: 1) низкая точность оперативной информации от объекта управления, возникающая ввиду погрешности датчиков замера технологических параметров, их невысокой надежности, отказов каналов связи, запаздывания при передаче информации по уровням управления, отсутствия возможности контроля параметров во всех требуемых точках технологического процесса. Наличие такого вида неопределенности обуславливает неточность задания переменных в расчетных моделях, начальных и граничных условий; 2) недостаточная адекватность моделей объектов контроля и управления, вызванная неэквивалентностью решений системных многоуровневых иерархических систем и используемых на практике отдельных локальных задач. В результате растут расходы на эксплуатацию, падает срок службы кабеля и системы в целом, сокращается производительность труда.
Задачей предлагаемого изобретения является повышение надежности и эффективности устройства кабельного питания мобильных подвижных сельскохозяйственных объектов.
В результате использования предлагаемого изобретения повышаются срок службы, эффективность и производительность процессов и устройства в целом за счет постоянного контроля усилий, возникающих в кабеле при работе, а также за счет управлений, гарантирующих значения этих усилий в диапазоне, исключающем повреждения кабеля из-за обрывов или наездов объекта на него во всех режимах работы.
Вышеуказанный технический результат достигается тем, что при автоматическом управлении подачей кабеля системы электроснабжения мобильного сельскохозяйственного объекта осуществляют непрерывный мониторинг информационных параметров, таких как скорость движения мобильного сельскохозяйственного объекта, механические усилия, возникающие в питающем кабеле при движении мобильного сельскохозяйственного объекта, и выработку управляющих воздействий для управления электроприводом поворота стрелы и электроприводом кабелеприемного барабана, при этом усилия на питающий кабель оценивают в характерных точках трассы его прохождения, таких как место входа кабеля в стрелу для оценки усилия в горизонтальной плоскости, место выхода кабеля из стрелы для оценки усилия в вертикальной плоскости, место входа кабеля на барабан, при этом каждый из диапазонов изменения информационных переменных разбивают на пять поддиапазонов и определяют не точное значение информационных переменных, а принадлежность значения информационной переменной к одному из поддиапазонов, затем поддиапазоны каждой из информационных переменных сопоставляют и исходя из условия полного отсутствия выхода значений усилий на питающий кабель за пределы диапазона допустимых значений вырабатываются управляющие воздействия. Устройство автоматического управления системой подачи кабеля мобильного сельскохозяйственного объекта, включает стрелу, кабелеприемный барабан с электроприводом, питающий кабель, датчик скорости движения объекта, три датчика контроля усилия на питающий кабель, блок памяти, блок правил, вычислительное управляющее устройство, при этом выход датчика скорости движения объекта соединен к первому входу вычислительного управляющего устройства, выход датчика контроля усилия на питающий кабель в горизонтальной плоскости соединен со вторым входом вычислительного управляющего устройства, выход датчика контроля усилия на питающий кабель в вертикальной плоскости соединен с третьим входом вычислительного управляющего устройства, выход датчика контроля усилия на питающий кабель на барабане соединен с четвертым входом вычислительного управляющего устройства, блок правил и блок памяти соединены с вычислительным управляющим устройством, также выходы вычислительного управляющего устройства подсоединены к входу регулируемого электропривода кабелеприемного барабана и к входу регулируемого электропривода консольно-поворотной стрелы.
Способ управления реализуется следующим образом.
1. Определяют информационные параметры и их пределы изменения (сигналы с выходов датчиков: датчик скорости движения объекта, три датчика контроля усилия на питающий кабель). В нашем случае информационными параметрами являются скорость движения объекта, направление усилия в горизонтальной, направление усилия в вертикальной плоскости, натяжение кабеля на барабане.
В качестве примера рассмотрим процесс управления поворотом стрелы. Входными параметрами здесь будут скорость, направление усилия в горизонтальной плоскости.
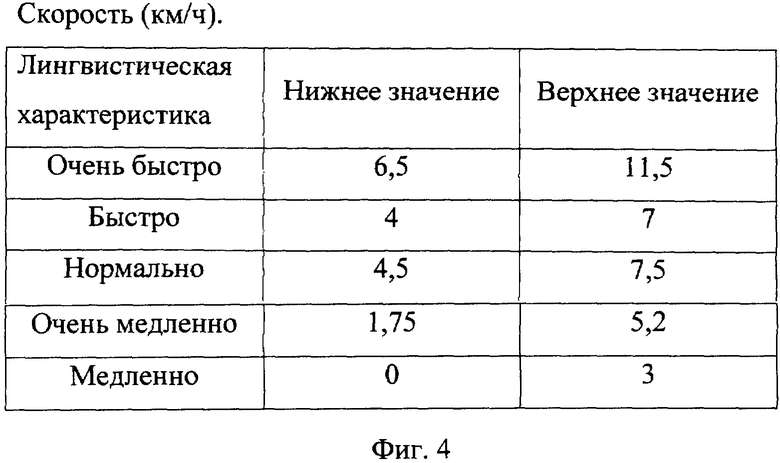
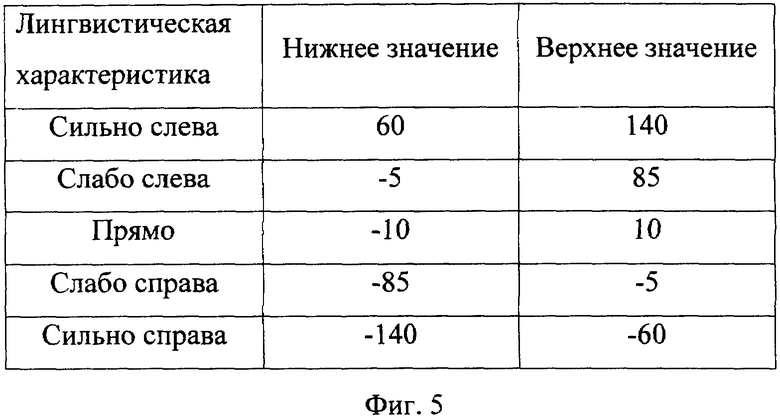
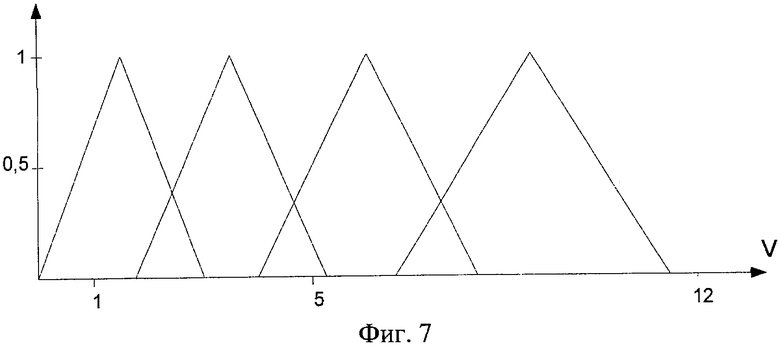
Диапазон изменения параметра скорость разбиваем на следующие поддиапазоны: очень медленно, медленно, нормально, быстро, очень быстро. Диапазон изменения параметра усилие в горизонтальной плоскости разбиваем на следующие поддиапазоны: сильно влево, слабо влево, прямо, слабо вправо, сильно вправо. Диапазон изменения параметра усилие в вертикальной плоскости разбиваем на следующие поддиапазоны: сильно сверху, слабо сверху, прямо, слабо снизу, сильно снизу.
2. Определяют управляющие воздействия и их пределы изменения (команды управления приводами барабана и стрелы).
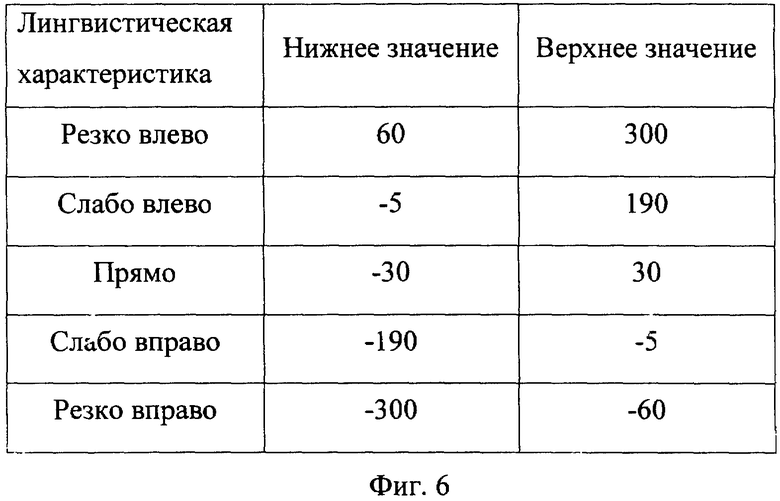
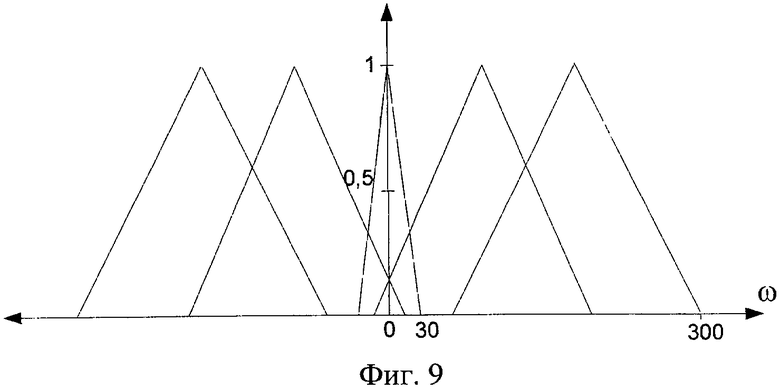
Диапазон изменения воздействия команда управления приводом стрелы разбиваем на следующие поддиапазоны: резко влево, слабо влево, прямо, слабо вправо, резко влево. Диапазон изменения воздействия команда управления приводом барабана разбиваем на следующие поддиапазоны: очень быстро, быстро, нормально, медленно, очень медленно.
3. Определяют функции принадлежности для каждой информационной переменной и управляющего воздействия.
При построении функций принадлежности основным является понятие относительного предпочтения одного режима работы системы перед другим, т.е. для двух режимов работы x1 и x2 можно записать  в том случае, когда режим x2 более предпочтителен (с точки зрения эффективности и допустимости), чем x1. Предпочтительность одного режима работы перед другим может быть вызвана причинами технологического, экономического, надежностного, экологического характера и субъективными различными причинами, вызванными неформальными сведениями, которыми обладает лицо, принимающее решение.
в том случае, когда режим x2 более предпочтителен (с точки зрения эффективности и допустимости), чем x1. Предпочтительность одного режима работы перед другим может быть вызвана причинами технологического, экономического, надежностного, экологического характера и субъективными различными причинами, вызванными неформальными сведениями, которыми обладает лицо, принимающее решение.
Функция принадлежности μD(x)∈[0, 1] ставит в соответствие каждому режиму х∈Х число из интервала [0, 1], характеризующее степень принадлежности решения к подмножеству D эффективных и допустимых решений.
Естественным является также и требование непрерывности функции μD(x), которое формализует интуитивное представление о том, что если два решения множества Х отличаются друг от друга лишь незначительно, то значения функций принадлежности для этих решений также близки.
Функция μD(x) должна быть согласована с отношением  , т.е. μD(x1)≤μD(x2), тогда и только тогда, когда
, т.е. μD(x1)≤μD(x2), тогда и только тогда, когда  .
.
Конкретный вид функций принадлежности определяется на основе различных дополнительных предположений о свойствах этих функций (симметричность, монотонность, непрерывность первой производной и т.д.) с учетом специфики имеющейся неопределенности, реальной ситуации на объекте и числа степеней свободы в функциональной зависимости
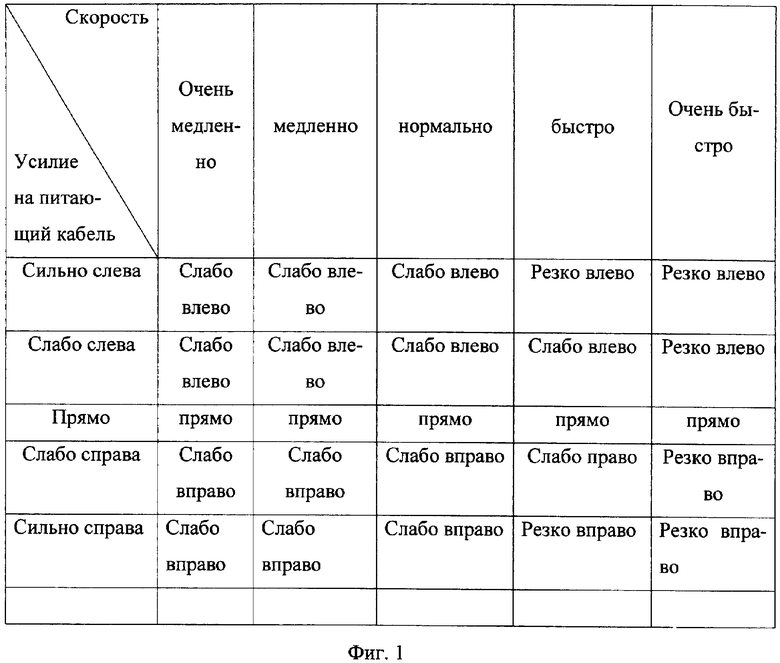
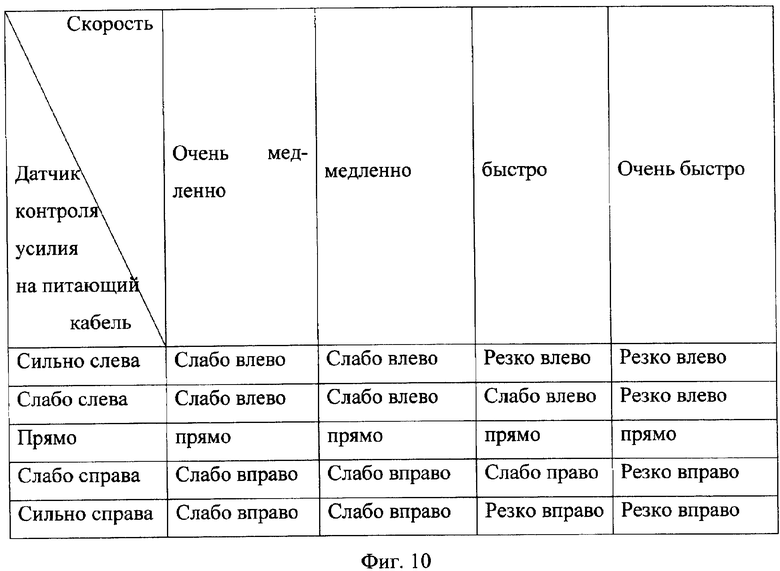
4. Составляют базу правил, которая будет отвечать за управляющие операции, например, для привода стрелы:
Базис нечетких правил состоит из набора нечетких IF-THEN-правил вида. Без потери общности можно рассматривать многовходовую систему нечеткой логики с одним выходом, т.к. система со многими выходами может быть представлена как композиция группы систем, имеющих один выход. Базис нечетких правил является основной частью системы нечеткой логики в том смысле, что остальные ее компоненты используются для интерпретации этих правил и их применения при решении конкретных задач. Практика показывает, что нечеткие IF-THEN-правила в форме предоставляют удобный механизм человеку-эксперту для выражения своих знаний.
Нечеткие IF-THEN-правила выглядят следующим образом:
IF x1 есть Fi p и ... и xn есть Fn p THEN у есть Gp,
где F1 p и Gp - нечеткие множества;
 =(x1,
=(x1,  xn)T∈X и y∈Y есть входные и выходная лингвистические переменные соответственно;
xn)T∈X и y∈Y есть входные и выходная лингвистические переменные соответственно;
Примерная база правил для управления приводом стрелы дана на фиг.1.
Каждая ячейка базы правил определяется как сложение (логическое И) входов, чтобы
определить отдельный выход.
Практика показывает, что эти нечеткие IF-THEN-правила обеспечивают удобный механизм для представления знаний человека-эксперта. Каждое нечеткое IF-THEN-правило определяет нечеткое множество F1 p×...×Fn p...→Gp.
5. Переход от нечеткости к конкретным числовым значениям.
База знаний может трактоваться как некоторое разбиение пространства влияющих факторов на нечеткие подобласти, в каждой из которых значение функции отклика рассчитывается как линейная комбинация входов. Правила являются своего рода переключателями с одного линейного закона «входы-выход» на другой, тоже линейный. Границы подобластей размытые, следовательно, одновременно могут выполняться несколько линейных законов, но с различными весами. Результирующее значение выхода у определяется как суперпозиция линейных зависимостей, выполняемых в данной точке X, n-мерного факторного пространства. Это может быть взвешенное среднее
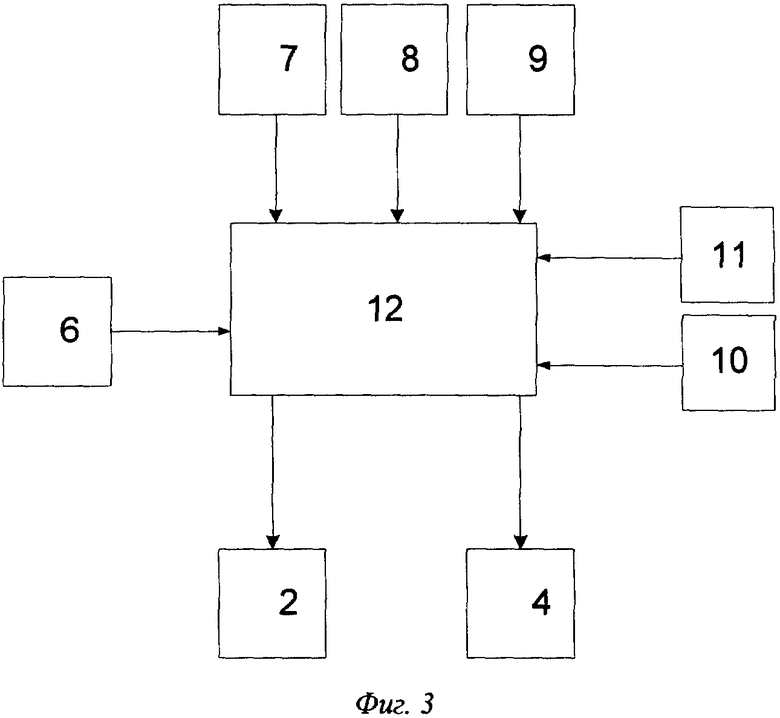
Сущность изобретения поясняется фиг.2, на которой представлена общая схема кабельной системы электроснабжения мобильного подвижного сельскохозяйственного объекта, и фиг.3, на которой дана структурная схема ее системы управления.
Кабельная система электроснабжения мобильного подвижного сельскохозяйственного объекта содержит консольно-поворотную стрелу 1 с электроприводом 2, кабелеприемный барабан 3 с электроприводом 4, питающий кабель 5, датчик скорости 6 движения объекта, три датчика контроля усилия в горизонтальной плоскости 7, вертикальной плоскости 8, на питающий кабель на барабане 9, блок памяти 10, блок правил 11, вычислительное управляющее устройство 12.
Выход датчика скорости 6 движения объекта подсоединен к первому входу вычислительного управляющего устройства 12, выход датчика 7 контроля усилия на питающий кабель в горизонтальной плоскости соединен со вторым входом вычислительного управляющего устройства 12, выход датчика 8 контроля усилия на питающий кабель в вертикальной плоскости соединен с третим входом вычислительного управляющего устройства 12, выход датчика 9 контроля усилия на питающий кабель на барабане соединен с четвертым входом вычислительного управляющего устройства 12, блока правил 11 и блок памяти 10 соединены с вычислительным управляющим устройством 12, выход вычислительного управляющего устройства 12 подсоединен к входу регулируемого электропривода кабелеприемного барабана и к входу регулируемого электропривода 4 и консольно-поворотной стрелы 2.
Устройство работает следующим образом.
При движении подвижного объекта непрерывно производится мониторинг воздействий на питающий кабель со стороны внешней среды и технических средств. Для этого фиксируются значения скорости движения подвижного объекта и усилий на питающий кабель с помощью датчика скорости 6 движения объекта и датчика контроля усилия в горизонтальной плоскости 7, вертикальной плоскости 8, на питающий кабель на барабане 9. Сигналы датчика скорости 6 движения объекта и датчика контроля усилия в горизонтальной плоскости 7, вертикальной плоскости 8, на питающий кабель на барабане 9 обрабатываются вычислительным управляющим устройством 12, в результате чего подбирается функция принадлежности, которая соответствует характеру изменения сигнала (контролируемого параметра). После этого сигнал с выхода блока базы правил 11 обрабатывается вычислительным управляющим блоком 12, который рассчитывает значения скоростей движения электроприводов регулируемого электропривода 4 барабана 3 и электропривода 2 консольно-поворотной стрелы 4, а также вырабатывает команды управления регулируемому электроприводу 4 барабана 3 и электроприводу 2 консольно-поворотной стрелы 4.
При движении подвижного объекта питающий кабель 5 сматывается с кабелеприемного барабана 3 при удалении от места подключения к источнику электроснабжения и наматывается на него при приближении к источнику электроснабжения. Датчики 7, 8 контроля усилия на питающий кабель контролируют натяжение кабеля 5 в консольно-поворотной стреле 1. Значение усилия в горизонтальной плоскости оценивается датчиком 7 и изменяется до допустимых нагрузок на кабель регулированием скорости вращения барабана 3. Значение усилия в вертикальной плоскости оценивается датчиком 8 и по сигналу управления вычислительного управляющего устройства 12 изменяется регулированием скорости вращения электропривода 2 консольно-поворотной стрелы 1, перемещая стрелу 1 в сторону уменьшения нагрузки на кабель 5.
В качестве примера рассмотрим процесс управления поворотом стрелы. Входными параметрами здесь являются скорость, значение усилия в горизонтальной плоскости. При повороте объекта слева возникло усилие на кабель и составило 70% от допустимого значения, скорость движения при этом равна 5 км/ч. Рассмотрим алгоритм работы системы с данными входными параметрами.
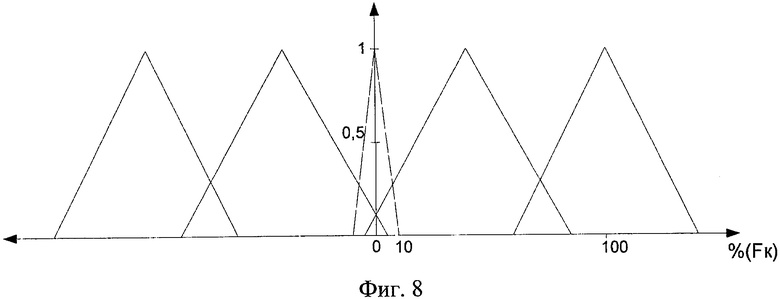
1. Интерпретируем входные переменные и устанавливаем их пределы (фиг.4). Усилие на кабель в горизонтальной плоскости (% от допустимой нагрузки) - фиг.5.
2. Интерпретируем выходные переменные и устанавливаем их пределы. Скорость вращения барабана стрелы (об/мин) - фиг.6.
3. Определяем функции принадлежности для каждой входной и выходной переменной.
Нижнее и верхнее значение определяют границы треугольной функции принадлежности.
Функция принадлежности для скорости - фиг.7.
Функция принадлежности для усилия на кабель в горизонтальной плоскости - фиг.8.
Функция принадлежности для скорости вращения поворота стрелы - фиг.9.
4. Составление базы правил - фиг 10.
5. Переход от нечеткости к конкретным числовым значениям.
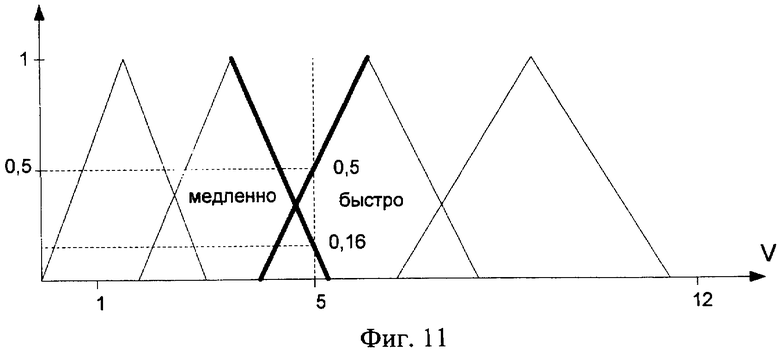
Итак, подставим конкретные входные параметры в соответствующие функции принадлежности - фиг.11.
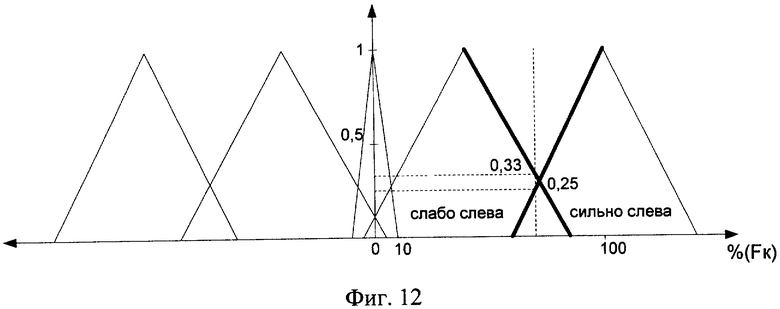
Задействованы два интервала «медленно» со степенью принадлежности 0,16 и «быстро» со степенью принадлежности 0,5 - фиг.12.
Задействованы два интервала «слабо слева» со степенью принадлежности 0,33 и «сильно слева» со степенью принадлежности 0,25.
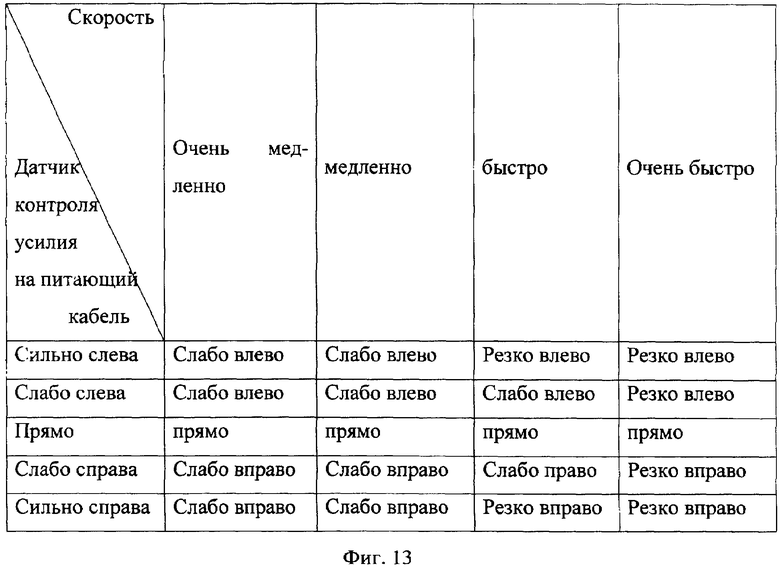
В базе правил активированы четыре правила - фиг.13.
Комбинируют значения функции принадлежности, используя логическое «И».
Правило 1. (Сильно слева) И (Медленно)=min(0.25, 0.16)=0,16
Правило 2. (Сильно слева) И (Быстро)=min(0.25, 0.5)=0,25
Правило 3. (Слабо слева) И (Медленно)=min(0.33, 0.16)=0,16
Правило 4. (Слабо слева) И (Быстро)=min(0.33, 0.5)=0,33
Полученные величины определяют область пересечения для выходных значений. Области пересечения показаны ниже, на диаграмме функций принадлежностей для уверенности отбора.
Теперь необходимо определить центр по формуле

Таким образом, 50 об/мин - скорость вращения привода стрелы барабана при входных данных: скорость движения объекта - 5 км/ч и горизонтальная сила, действующая на кабель, - 70% от максимально допустимой.
Использование предлагаемых способа и устройства гарантирует отсутствие опасных воздействий на питающий кабель, усилия на кабель не превышают допустимые значения. Это предотвращает обрыв и другие повреждения кабеля и исключает его провисание и наезд на него. В результате применения устройства надежность и срок службы устройства значительно возрастают.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАБЕЛЬНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ МОБИЛЬНОГО ПОДВИЖНОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО ОБЪЕКТА | 2004 |
|
RU2269854C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО ПОДВИЖНОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО ОБЪЕКТА | 2007 |
|
RU2332824C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2758189C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ НАМОТКИ ПИТАЮЩЕГО КАБЕЛЯ САМОХОДНЫХ ЭЛЕКТРИФИЦИРОВАННЫХ МАШИН | 1949 |
|
SU80300A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСНАБЖЕНИЯ МОБИЛЬНОГО ЭЛЕКТРИЧЕСКОГО АГРЕГАТА | 1999 |
|
RU2158206C1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| Устройство для свободной укладки и выдачи гибкого питающего кабеля на самоходных электрифицированных машинах | 1956 |
|
SU114079A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО АГРЕГАТА ПРИ ВЫПОЛНЕНИИ АГРОПРОЦЕССОВ | 2010 |
|
RU2430499C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА МОБИЛЬНОГО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА ПРИ ПРЕОДОЛЕНИИ ПРЕПЯТСТВИЙ | 2014 |
|
RU2575553C2 |
Изобретение относится к мобильным подвижным сельскохозяйственным объектам. Задачей предлагаемого изобретения является повышение надежности и эффективности устройства кабельного питания. При автоматическом управлении подачей кабеля осуществляют непрерывный мониторинг информационных параметров, таких как скорость движения мобильного сельскохозяйственного объекта, механические усилия, возникающие в питающем кабеле при движении мобильного сельскохозяйственного объекта, и выработку управляющих воздействий для управления электроприводом поворота стрелы и электроприводом кабелеприемного барабана, при этом усилия на питающий кабель оценивают в характерных точках трассы его прохождения и определенным образом вырабатываются управляющие воздействия. Устройство автоматического управления системой подачи кабеля мобильного сельскохозяйственного объекта включает стрелу, кабелеприемный барабан с электроприводом, питающий кабель, датчик скорости движения объекта, три датчика контроля усилия на питающий кабель, блок памяти, блок правил, вычислительное управляющее устройство. 2 н.п. ф-лы, 13 ил.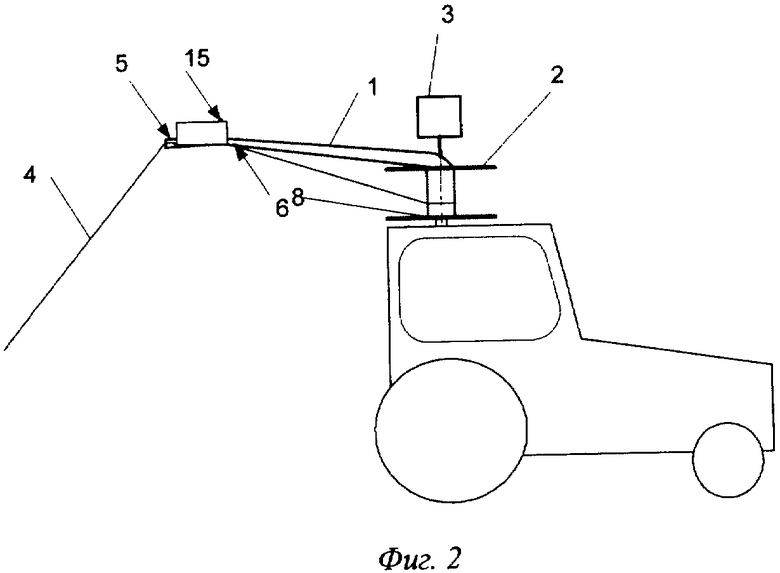
| КАБЕЛЬНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ МОБИЛЬНОГО ПОДВИЖНОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО ОБЪЕКТА | 2004 |
|
RU2269854C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСНАБЖЕНИЯ МОБИЛЬНОГО ЭЛЕКТРИЧЕСКОГО АГРЕГАТА | 1999 |
|
RU2158206C1 |
| US 4108264, 22.08.1978. | |||

