Изобретение относится к области сельского хозяйства, в частности к вопросам управления движением полевых мобильных подвижных сельскохозяйственных агрегатов, в частности, питающихся через однопроводниковую линию электропередачи резонансной системы электроснабжения. Возможно применение в системах дифференцированного (точного) земледелия.
Известны способ и устройство управления движением подвижного сельскохозяйственного мобильного агрегата, маршрут движения которого определяется трассой прокладки однопроводникового кабеля линии электропередачи резонансной системы электроснабжения напряжением 0,5-500 кВ, резонансной частотой 0,1-100 кГц. Однопроводниковая линия проложена в почве возделываемого угодья в непосредственной близости к ее поверхности. Мобильный агрегат движется над однопроводной линией. Трасса прокладки однопроводниковой линии совпадает с маршрутом перемещения мобильного агрегата. Для привязки маршрута движения мобильного агрегата к трассе прокладки кабеля применяют датчик смещения траектории движения влево, датчик смещения траектории движения вправо, размещенные под днищем подвижного мобильного агрегата, вычислительное управляющее устройство [Патент №2332824, опубл. 10.09.2008, бюл. №25, Система управления движением мобильного подвижного сельскохозяйственного объекта/ авторы: Д.С.Стребков, Королев В.А., А.Ю.Фельдшеров, А.И.Некрасов, Польский В.А., Борзина Л.Н.]. Известное устройство обеспечивает движение мобильного агрегата по маршруту, отмеченному трассой проложенного в почве однопроводникового кабеля системы электроснабжения.
Недостатком данного способа управления и технического устройства его реализации является то, что при необходимости определить координаты местонахождения мобильного агрегата на возделываемом угодье используют специальные технические устройства. Данное техническое решение без применения этих специальных устройств сложно использовать при управлении движением мобильного агрегата, в системах точного земледелия. В итоге не обеспечиваются возможные производительность и качество работы мобильного агрегата, сокращаются объемы произведенной продукции и ее качество, могут возникать перерасходы семян, удобрений химических препаратов.
Задачей предлагаемого изобретения является повышение технико-экономической эффективности сельскохозяйственных подвижных мобильных агрегатов.
В результате использования предлагаемого изобретения повышаются технико-экономические характеристики, эффективность и производительность процессов и устройства.
Вышеуказанный технический результат достигается тем, что оценивают характер распределения и значения напряженности электрического поля вдоль трассы прокладки однопроводникового кабеля, затем, используя эти данные, выполняют привязку трассы прокладки однопроводникового кабеля к ориентирам местности на возделываемом угодье, после этого находят значение напряженности электрического поля однопроводникового кабеля резонансной системы электроснабжения в точке нахождения мобильного агрегата, по этому значению рассчитывают координаты местонахождения мобильного агрегата в пространстве и по полученным координатам вырабатывают воздействия для управления движением мобильного агрегата.
Технический результат достигается тем, что в предлагаемое устройство включены введены блок определения объекта на трассе движения, дальномер, при этом выход датчика напряженности электрического поля соединен с одним входом вычислительного управляющего устройства, дальномер соединен с другим входом вычислительного управляющего устройства.
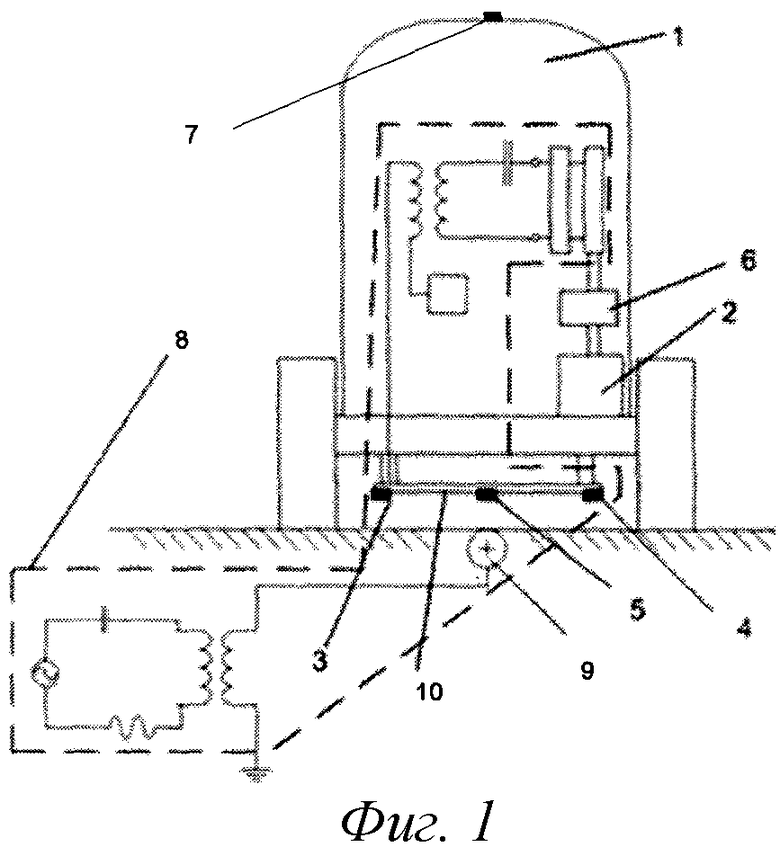
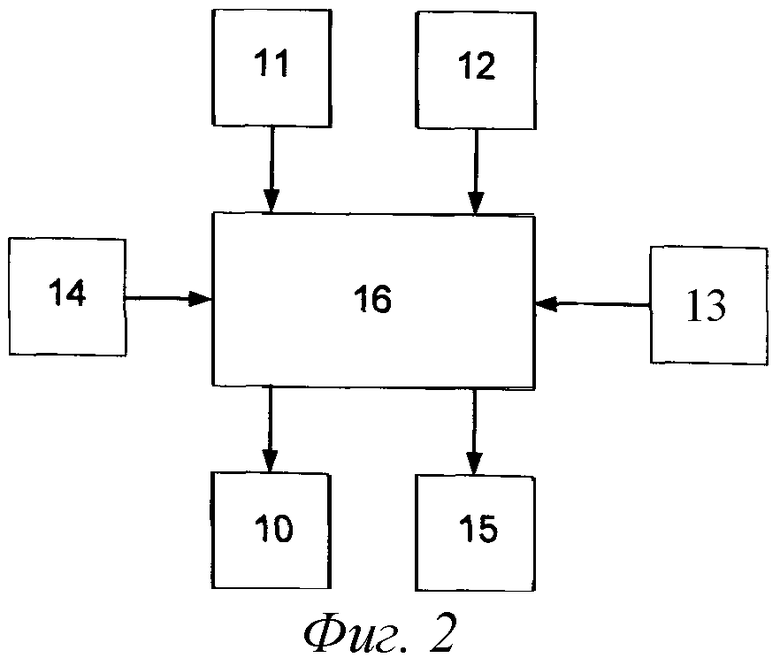
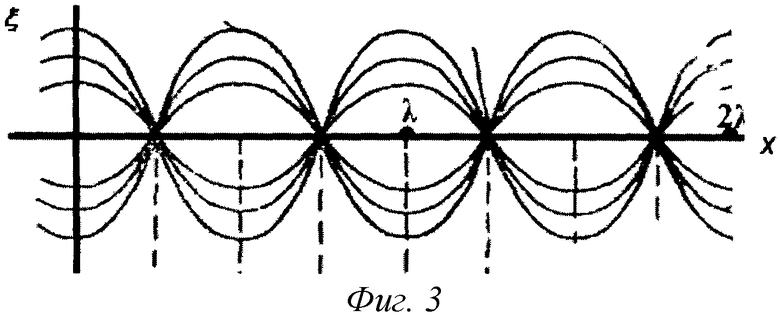
Сущность изобретения поясняется фиг.1-3. На фиг.1 представлен состав устройства управления мобильным подвижным сельскохозяйственным объектом, на фиг.2 дана структурная схема этого устройства, на фиг.3 показаны стоячие волны напряженности электрического поля в однопроводниковом кабеле линии электропередачи резонансной системы электроснабжения.
На фиг.1, 2 изображены мобильный агрегат 1, тяговый электропривод 2 мобильного агрегата 1, датчик 3 смещения траектории движения влево, датчик 4 смещения траектории вправо, блок 5 определения объекта на трассе движения, вычислительное управляющее устройство 6, дальномер 7, резонансная система электроснабжения 8, в состав которой входят однопроводниковый кабель линии электропередачи 9, токосъемное устройство 10. Однопроводниковый кабель линии электропередачи 9 резонансной системы электроснабжения 8 проложен в почве возделываемого угодья в непосредственной близости от поверхности почвы, токосъемное устройство 10 установлено под днищем подвижного агрегата. Выход датчика 3 смещения траектории влево подключен к первому входу вычислительного управляющего устройства 6, выход датчика 4 смещения траектории движения вправо подключен ко второму входу вычислительного управляющего устройства 6, блок 5 определения объекта на трассе движения подключен к третьему входу вычислительного управляющего устройства 6.
Устройство работает следующим образом. Мобильный агрегат 1 движется вдоль трассы в виде проложенного в почве однопроводникового кабеля линии электропередачи 9. Датчики смещения траектории влево 3 и вправо 4 определяют отклонения от идеального прохождения конкретного участка пути вдоль трассы соответственно влево и вправо. Информация с датчиков смещения траектории влево 3 и вправо 4 поступает в вычислительное управляющее устройство 6, в котором формируется сигнал управления, поступающий в тяговый электропривод 2, который обеспечивает движение мобильного агрегата 1 по заданной траектории. Блок 5 определения объекта на трассе движения определяет значения напряженности электрического или магнитного поля в точке нахождения мобильного агрегата 1. Информация от блока 5 определения объекта на трассе движения поступает в вычислительное управляющее устройство 6. Вычислительное управляющее устройство 6 обрабатывает эту информацию и при первом проходе мобильного агрегата по возделываемому угодью устанавливает взаимосвязь характера изменения напряженности электрического поля вдоль трассы прокладки кабеля однопроводниковой системы с ориентирами на возделываемом угодье. В ходе выполнения технологических процессов при движении мобильного агрегата 1 в штатном режиме блок 5 определения объекта на трассе движения определяет значения напряженности электрического поля кабеля резонансной системы электроснабжения в точке нахождения мобильного агрегата 1 относительно однопроводникового кабеля линии электропередачи 9 резонансной системы электроснабжения. По этим значениям, используя зафиксированную при первом проходе мобильного агрегата 1 по возделываемому угодью привязку трассы прокладки кабеля к местности возделываемого угодья, вычислительное управляющее устройство 6 рассчитывает координаты местонахождения мобильного агрегата 1 на возделываемом угодье и вырабатывает воздействия для управления его движением.
Способ управления перемещением мобильного агрегата, питающегося от однопроводникового кабеля линии электропередачи резонансной системы электроснабжения, реализуется следующим образом. При работе в однопроводниковом кабеле линии электропередачи по всей длине его прокладки образуются стоячие волны напряженности электрического поля. Частота и фаза колебаний всех участков стоячей волны одинакова, а амплитуда этих колебаний меняется во времени вдоль однопроводникового кабеля линии электропередачи от нуля ("узлы") до максимального значения ("пучности"). Распределение напряженности электрического поля (ξ) во времени (t) и вдоль трассы ее распределения описываются известной зависимостью:
 ,
,
где А - амплитуда напряженности электрического поля ("пучности" стоячей волны), λ - длина волны, х - расстояние от начала однопроводниковой линии до рассматриваемой точки, ω - угловая частота.
Явление наличия стоячих волн используют на этапе настройки системы при вводе мобильного агрегата в эксплуатацию при привязке трассы прокладки однопроводникового кабеля к ориентирам на местности и определении значений напряженности электрического поля во всех точках этой трассы. Привязку трассы прокладки кабеля к ориентирам на местности производят с помощью специальных технических устройств, например лазерных дальномеров, средств технического зрения и др. Значения напряженности электрического поля во всех точках трассы прокладки кабеля определяют экспериментально, используя датчики электрического поля, либо расчетными методами с применением вышеприведенной зависимости распределения характеристик стоячей волны. При штатной эксплуатации однопроводниковый кабель должен располагаться под токосъемным устройством, которое размещают на днище мобильного агрегата. Смещение мобильного агрегата от трассы прокладки однопроводникового кабеля оценивается сравнением значений напряженности слева и справа от токосъемного устройства. Если различие этих значения больше допустимой величины, вырабатывают команду на изменение направления движения. Измерения значений напряженности электрического поля вдоль трассы прокладки кабеля обеспечивают локализацию точки нахождения мобильного агрегата относительно однопроводникового кабеля линии электропередачи резонансной системы электроснабжения и на возделываемом угодье. По полученным координатам местонахождения мобильного агрегата вырабатывают воздействия для управления его движением.
Применение предлагаемого способа целесообразно при реализации технологий возделывания пропашных культур, садовых растений. Однопроводниковый кабель, проложенный в (на поверхности) почвы, обеспечивает перемещение мобильного агрегата по маршруту, определяемому трассой его прокладки, а характер изменения магнитного поля вокруг однопроводникового кабеля - определение координат агрегата на возделываемом угодье. В качестве блока определения объекта на трассе движения может быть использован датчик напряженности электрического или магнитного поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТИМУЛЯЦИИ ПРОЦЕССОВ ВЕГЕТАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2010 |
|
RU2432734C1 |
| УСТРОЙСТВО УНИЧТОЖЕНИЯ СОРНЫХ РАСТЕНИЙ | 2012 |
|
RU2501199C2 |
| ЭЛЕКТРИФИЦИРОВАННАЯ СИСТЕМА ЗЕМЛЕДЕЛИЯ (ВАРИАНТЫ) | 2011 |
|
RU2492609C2 |
| УСТРОЙСТВО ЭНЕРГОСНАБЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2443578C1 |
| СПОСОБ И УСТРОЙСТВО БЕСКОНТАКТНОГО ЭЛЕКТРОСНАБЖЕНИЯ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2442700C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО ПОДВИЖНОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО ОБЪЕКТА | 2007 |
|
RU2332824C1 |
| СПОСОБ И УСТРОЙСТВО ЭЛЕКТРОСНАБЖЕНИЯ ПОТРЕБИТЕЛЕЙ, ПИТАЮЩИХСЯ ОТ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2009 |
|
RU2423769C2 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНЫХ АГРЕГАТОВ ПРИ ВОЗДЕЛЫВАНИИ АГРОКУЛЬТУР | 2010 |
|
RU2471338C2 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2408476C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В РАКЕТНО-КОСМИЧЕСКИХ КОМПЛЕКСАХ (ВАРИАНТЫ) | 2012 |
|
RU2521108C2 |
Способ управления движением мобильного агрегата при выполнении агропроцессов заключается в определении трассы прокладки однопроводникового кабеля линии электропередачи резонансной системы электроснабжения. При осуществлении способа оценивают характер распределения и значения напряженности электрического поля вдоль трассы прокладки кабеля. Затем выполняют привязку трассы прокладки кабеля к ориентирам местности на возделываемом угодье. После этого находят значение напряженности электрического поля кабеля резонансной системы электроснабжения в точке нахождения мобильного агрегата. Затем рассчитывают координаты местонахождения мобильного агрегата в пространстве. По полученным координатам вырабатывают воздействия для управления движением мобильным агрегатом. Устройство управления движением содержит однопроводниковую линию электропередачи резонансной системы электроснабжения, датчик смещения траектории движения влево, датчик смещения траектории движения вправо, вычислительное управляющее устройство, тяговый электропривод, блок определения объекта на трассе движения, дальномер. Линия электропередачи проложена в почве близко к поверхности. Датчики установлены под днищем мобильного агрегата. Выход датчика напряженности электрического поля соединен с одним входом вычислительного управляющего устройства. Дальномер соединен с другим входом вычислительного управляющего устройства. Повышаются технико-экономические характеристики, эффективность и производительность процессов и устройства. 2 н.п. ф-лы, 3 ил.
1. Способ управления движением мобильного агрегата при выполнении агропроцессов, питающегося от резонансной системы электроснабжения, включающий определение трассы прокладки однопроводникового кабеля линии электропередачи резонансной системы электроснабжения, отличающийся тем, что оценивают характер распределения и значения напряженности электрического поля вдоль трассы прокладки однопроводникового кабеля, затем, используя эти данные, выполняют привязку трассы прокладки однопроводникового кабеля к ориентирам местности на возделываемом угодье, после этого находят значение напряженности электрического поля однопроводникового кабеля резонансной системы электроснабжения в точке нахождения мобильного агрегата, по этому значению рассчитывают координаты местонахождения мобильного агрегата в пространстве и по полученным координатам вырабатывают воздействия для управления движением мобильным агрегатом.
2. Устройство управления движением мобильного агрегата при выполнении агропроцессов, питающегося от резонансной системы электроснабжения, содержащее однопроводниковую линию электропередачи резонансной системы электроснабжения, проложенную в почве возделываемого угодья близко к поверхности почвы, датчик смещения траектории движения влево, датчик смещения траектории движения вправо, установленные под днищем мобильного агрегата, вычислительное управляющее устройство, тяговый электропривод, отличающееся тем, что в устройство введены блок определения объекта на трассе движения, дальномер, при этом выход датчика напряженности электрического поля соединен с одним входом вычислительного управляющего устройства, дальномер соединен с другим входом вычислительного управляющего устройства.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО ПОДВИЖНОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО ОБЪЕКТА | 2007 |
|
RU2332824C1 |
| Устройство для передачи электроэнергии транспортному экипажу | 1974 |
|
SU542666A1 |
| БЛОК ДАВИЛЬНЫХ РОЛИКОВ ДЛЯ РОТАЦИОННОГО ВЫГЛАЖИВАНИЯ ЗАГОТОВОК | 2009 |
|
RU2409441C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2339203C2 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| JP 2009284712 А, 03.12.2009. | |||

