Изобретение относится к области диагностики двигателей различных типов, в частности двигателей внутреннего сгорания (ДВС), в эксплуатационных условиях, а также в процессе изготовления или ремонта по определению их скоростных характеристик: МКР(n) - крутящего момента от n, где n - частота вращения вала в минуту, N(n) - мощности от n и/или МT(n) - тормозного момента от n.
Известен способ диагностики ДВС, основанный на измерении числа свободных разгонов и расхода топлива за фиксированное время и последующем сравнении их с эталонными значениями (патент России 2248549, G01М 15/00, 2005 г.). Оценка скоростных характеристик двигателя (СХД) в этом способе опосредована и поэтому недостаточно точна.
Известен способ диагностики ДВС путем оценки СХД по изменению частоты вращения вала в установленном технологическом режиме работы двигателя (патент России 2037803, G01М 15/00, 1995 г.), при котором непрерывно измеряют промежутки времени, соответствующие повороту вала на смежные и равные угловые интервалы заданной величины, с синхронизацией начала измерения с одним и тем же тактом цикла работы определенного цилиндра. Такой способ позволяет диагностировать не только работу двигателя в целом, но и работу отдельных его цилиндров. Однако он специфичен, алгоритм его проведения перегружен и не предусматривает определение тормозного момента двигателя, в силу чего использование этого способа не всегда экономически оправдано.
Известен более простой и универсальный способ определения СХД по ускорению и/или замедлению движущихся инерционных масс, основанный на использовании для определения углового ускорения и частоты вращения вала ряда интервалов времени последовательных полных оборотов вала в установленном технологическом режиме работы двигателя (патент России 2280244, G01М 15/04, 2006 г), являющийся наиболее близким аналогом (прототипом) изобретения.
Способ проводят с помощью специального вычислительного блока, к которому подключают датчик положения вала диагностируемого двигателя и по взаимодействию датчика с одним и тем же выступом синхронизирующего диска, связанного с валом, отслеживают каждый полный оборот вала в виде исходного электрического сигнала определенной формы. После чего его преобразуют в цифровой и с заданной дискретизацией определяют временной интервал каждого фиксируемого оборота. Затем формируют последовательный ряд временных интервалов полных оборотов вала и по нему вычисляют угловую скорость ω и угловое ускорение Е(ω).
В прототипе каждый полный оборот отсчитывают с определенной долей приблизительности по кратному числу дискретного времени, что наряду с использованием сигнала в цифровом виде приводит к получению результата, как правило, с заведомой технологической ошибкой, которая вносит погрешность в определение углового ускорения вала двигателя, функция Е(ω) при этом неочевидна. Из-за формирования последовательного ряда временных интервалов полных оборотов по одному и тому же выступу диска, т.е. когда угловой шаг между двумя последовательными полными оборотами равен 2π, погрешности суммируются.
Перечисленные недостатки искажают протекание вычисленной функции Е(ω) (углового ускорения) и, следовательно, функции МКР(n). Точность определения СХД в прототипе таким образом снижена.
К тому же способ осуществим только с использованием специального вычислительного блока с высоким разрешением, что удорожает диагностику.
Диагностика четырехтактных ДВС, где рабочий процесс происходит за два полных оборота, таким способом нецелесообразна, т.к. функция Е(ω), а следовательно, функции МКР(n) могут принимать пилообразный характер из-за разной индикаторной мощности цилиндров в многоцилиндровом ДВС, а в одноцилиндровом ДВС, из-за разности тактов в двух последовательных оборотах.
Задача, решаемая изобретением, направлена на создание экономичного и эффективного способа определения СХД для диагностики различных типов двигателей с достаточной точностью.
Технический результат, получаемый от реализации изобретения, заключается в упрощении способа и повышении достоверности получаемых им данных.
Для достижения технического результата в способе определения скоростных характеристик двигателей по ускорению и/или замедлению движущихся инерционных масс с помощью вычислительного средства и подключенного к нему датчика положения вала диагностируемого двигателя, при котором в установленном технологическом режиме отслеживают каждый полный оборот вала в виде исходного электрического сигнала определенной формы, преобразуют электрический сигнал в цифровой, определяют временной интервал каждого фиксируемого оборота, формируют последовательный ряд временных интервалов отслеженных полных оборотов, по меньшей мере одинарных, и по нему вычисляют угловую скорость и угловое ускорение вала, в отличие от известных аналогов перед определением временного интервала каждого полного оборота восстанавливают форму исходного электрического сигнала, по меньшей мере частично, например в зоне наибольшей информативности, и временной интервал полного оборота определяют по повторяемости восстановленного сигнала в этой зоне.
В вариантах исполнения отличия способа состоят в том, что
временной интервал каждого последующего полного оборота определяют со смещенной по углу точкой отсчета относительно предыдущего оборота;
при диагностике четырехтактного двигателя последовательный ряд временных интервалов формируют по двум смежным полным оборотам вала, а точка отсчета временных интервалов каждой последующей пары смежных полных оборотов может быть смещена по углу относительно каждой предыдущей пары смежных полных оборотов.
Важным отличительным свойством предлагаемого способа является то, что его осуществление не требует специальных технических средств, например специального вычислительного блока, - способ реализуется через электронный блок управления двигателем либо бортовой компьютер автомобиля, либо внешний персональный компьютер.
Другие дополнительные отличия предлагаемого способа направлены на его детализацию и заключаются в том, что в качестве технологического режима устанавливают режимы разгона двигателя до максимальных оборотов или свободного выбега двигателя при торможении, или принудительного холостого хода.
Благодаря восстановлению исходной формы электрического сигнала, определению времени полного оборота по повторяемости восстановленного электрического сигнала в зоне наибольшей информативности и формированию последовательного ряда временных интервалов полных оборотов (одинарных или сдвоенных) с точками отсчета, смещенными по углу, изобретением обеспечивается снижение уровня возможных погрешностей, т.к. достигается более достоверное определение времени полного оборота из-за отсутствия в нем кратного дискретного времени, а также простота, эффективность и универсальность способа с возможностью реализации его с помощью доступных технических средств с более низким, чем в прототипе разрешением.
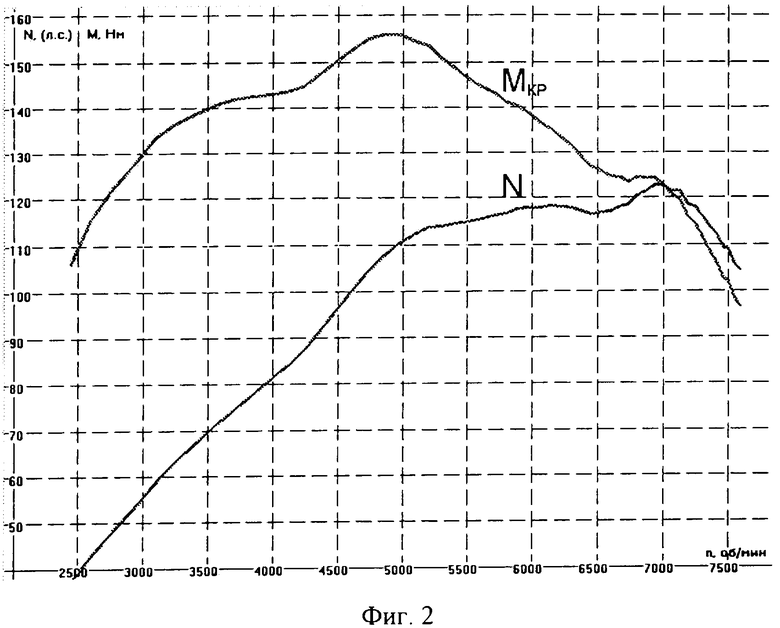
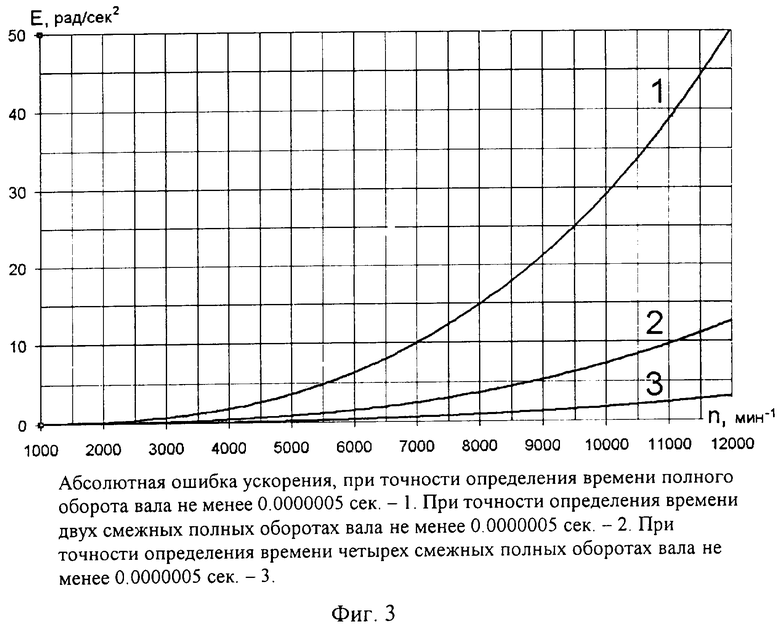
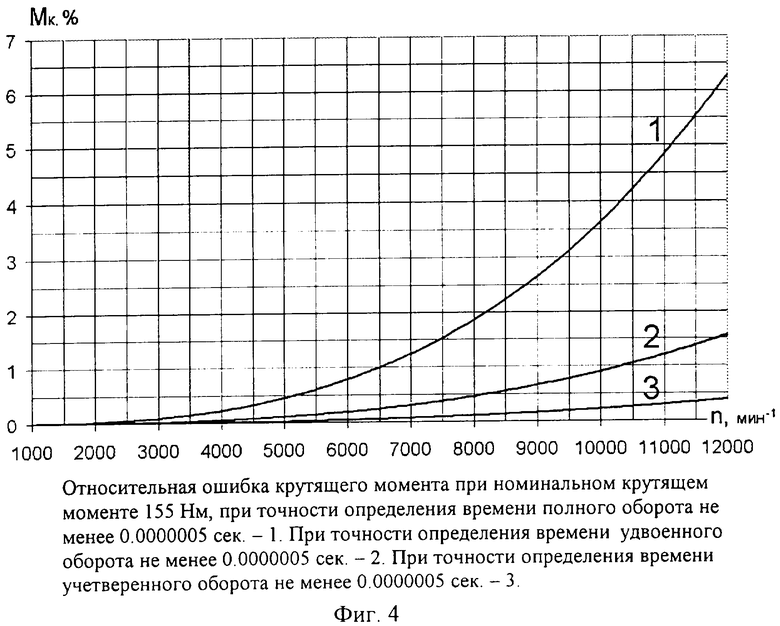
Для пояснения сущности способа представлены: фиг.1 - схема осуществления способа, фиг.2 - график внешней скоростной характеристики (ВСХ) ДВС, полученной данным способом, фиг.3, 4, 5 - графики, характеризующие точность способа.
Способ применим для различных типов двигателей, как ДВС: поршневых или роторных, так и других видов двигателей, в частности альтернативных ДВС, как имеющих электронный блок управления, так и без него. В последнем случае может быть использован внешний персональный компьютер.
Сущность способа поясняется на конкретном примере определения МКР(n) поршневого ДВС с использованием датчика 1 положения коленчатого вала, взаимодействующего с выступами синхронизирующего диска 2, взаимосвязанного с коленчатым валом, и внешнего компьютера 3, работающего по алгоритму, задаваемому программой, разработанной автором данного изобретения, также патентуемой.
Датчик 1 подключают к каналу входа аналого-цифрового преобразователя (АЦП) компьютера 3. Двигатель запускают и в режиме свободного разгона начинают съем электрических сигналов, которые с помощью АЦП компьютера 3 преобразуют в цифровой и затем восстанавливают форму электрического сигнала полностью или частично. В зависимости от формы восстановленный сигнал может иметь участки, не несущие полезной информации и частичное восстановление сигнала, например, в зоне наибольшей информативности, является наиболее рациональным.
Используя восстановленный сигнал за время каждого полного оборота вала двигателя, а для четырехтактного двигателя время сдвоенных оборотов, определяют с точностью не менее 0,0000005 с по фактической индикации перехода, например через ноль, последовательного ряда чисел в одном и том же повторяющемся через полный одинарный или сдвоенный оборот месте. Для определения углового ускорения и частоты вращения вала используют разности времени между полными оборотами. Формируют последовательный ряд временных интервалов одинарных (или сдвоенных для четырехтактного двигателя) полных оборотов вала с одной и той же точкой отсчета, или смещая ее по углу, например, на шаг, равный или меньше шага расположения выступов синхронизирующего диска, при этом угловой шаг между полными оборотами меньше 2π, что позволяет с дополнительной очевидностью определить протекание функции Е(ω) углового ускорения от угловой скорости вращения вала, а далее находят МКР(n) (крутящий момент двигателя), умножая Е(ω) (угловое ускорение вала) на IПР (приведенный момент инерции подвижных деталей). Технологический режим повторяют несколько раз.
Тормозной момент определяют по тому же алгоритму при замедлении вала в режиме свободного выбега при выключении двигателя или в режиме принудительного холостого хода при работающем двигателе.
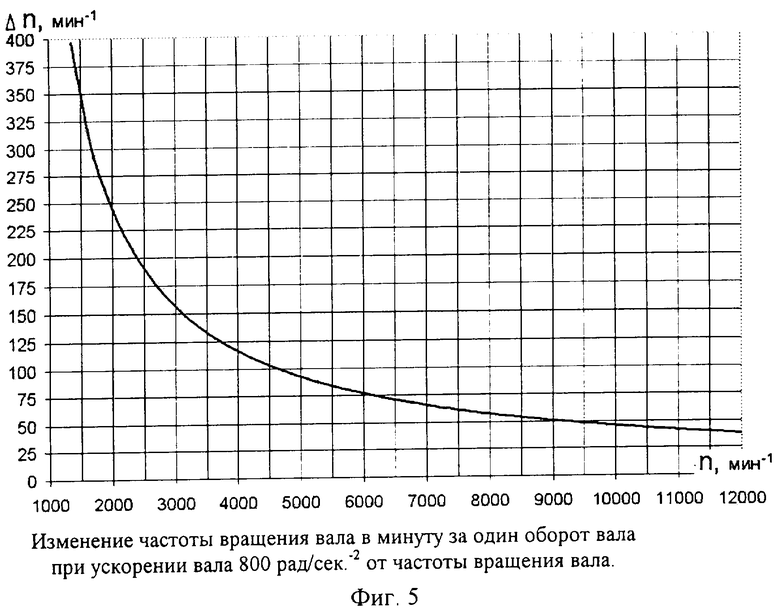
Из приведенной ВСХ четырехтактного ДВС (фиг.2) видно, что МКР(n) имеет гладкий характер протекания без пилообразных и волнообразных участков, благодаря точности определения удвоенного оборота коленчатого вала, которая не менее 0,0000005 с. Абсолютная ошибка ускорения имеет степенной характер (фиг.3). Принимая крутящий момент за 155 Нм, что соответствует максимальному крутящему моменту современного ДВС в режиме свободного разгона, получаем график относительной ошибки крутящего момента (фиг.4). Обеспеченная точность данного способа при определении МКР(n) с погрешностью не более 1% в диапазоне оборотов до 10000 об/мин для четырехтактного двигателя. При 10000 об/мин при угловом ускорение 800 рад/с-2 изменение частоты вращения вала в минуту за один оборот не более 50 об/мин, что позволяет использовать время четырех смежных оборотов, при этом погрешность МКР(n) не более 0,25% (фиг.5).
При диагностике других типов двигателей формирование последовательного ряда временных интервалов данным способом может быть осуществлено с использованием любого целесообразного числа отслеживаемых полных оборотов, например строенных или учетверенных (фиг.5), что обеспечивает дополнительное снижение погрешностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МОЩНОСТИ МЕХАНИЧЕСКИХ ПОТЕРЬ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2454643C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОЩНОСТИ МЕХАНИЧЕСКИХ ПОТЕРЬ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2007 |
|
RU2328713C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2541072C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗЫ РАБОЧЕГО ЦИКЛА ДВС | 2002 |
|
RU2242733C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗЫ РАБОЧЕГО ЦИКЛА ДВС | 2002 |
|
RU2242734C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МЕХАНИЗМА ГАЗОРАСПРЕДЕЛЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2458330C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2187792C2 |
| СПОСОБ КОНТРОЛЯ И ВИЗУАЛИЗАЦИИ РАБОТЫ ЩЕТОЧНО-КОЛЛЕКТОРНОГО УЗЛА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2536669C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ | 2016 |
|
RU2662017C2 |
Изобретение относится к диагностике двигателей различных типов, в частности двигателей внутреннего сгорания (ДВС), в эксплуатационных условиях, а также в процессе изготовления или ремонта. Способ универсален, прост и экономичен. Осуществим с использованием в качестве вычислительного средства блока управления двигателем или бортового компьютера автомобиля, или внешнего персонального компьютера. Способ обеспечивает наибольшую эффективность экспресс-диагностики двигателей. Способ определения скоростных характеристик двигателей по ускорению и/или замедлению движущихся инерционных масс с помощью вычислительного средства и подключенного к нему датчика положения вала диагностируемого двигателя осуществляют таким образом, что в установленном технологическом режиме отслеживают каждый полный оборот вала в виде исходного электрического сигнала определенной формы. Преобразуют электрический сигнал в цифровой. Определяют временной интервал каждого фиксируемого оборота. Формируют последовательный ряд временных интервалов отслеженных полных оборотов, по меньшей мере, одинарных, и по нему вычисляют угловую скорость и угловое ускорение вала. Перед определением временного интервала каждого полного оборота восстанавливают форму исходного электрического сигнала, по меньшей мере, частично, например в зоне наибольшей информативности, и временной интервал полного оборота определяют по повторяемости восстановленного сигнала в этой зоне. 7 з.п. ф-лы, 5 ил.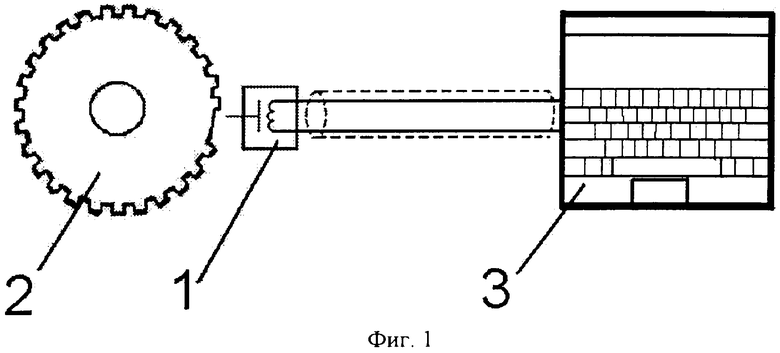
| СПОСОБ ДИАГНОСТИКИ ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280244C2 |
| US 4292670 А, 29.09.1981 | |||
| ДАТЧИКОВАЯ УСТАНОВКА ДЛЯ РАСПОЗНАВАНИЯ ЦИЛИНДРОВ В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ С n ЦИЛИНДРАМИ И СИСТЕМА ДЛЯ ЕЕ ПРИМЕНЕНИЯ | 1992 |
|
RU2104404C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2001 |
|
RU2198314C2 |
| Устройство для контроля параметров автомобильного двигателя внутреннего сгорания | 1981 |
|
SU992793A1 |
| Устройство для контроля частоты вращения | 1980 |
|
SU900188A1 |
| Устройство для контроля неравномерности вращения вала двигателя внутреннего сгорания | 1985 |
|
SU1460644A1 |
| Анализатор работы двигателя внутреннего сгорания | 1976 |
|
SU600410A1 |
| Счетчик числа оборотов вала | 1932 |
|
SU31684A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| DE 19622448 А1, 27.02.1997 | |||
| US 2002035866 A1, 28.03.2002 | |||
| DE 10151389 A1, 08.05.2003. | |||

