Изобретение относится к конвейеростроению, а именно к ленточным конвейерам на подвесных роликовых опорах, и может быть использовано для транспортирования горной массы как при горизонтальной, так и при наклонной установке конвейера, уклонного, подъемного или бремсбергового.
Известен ленточный конвейер (прототип), содержащий бесконечно замкнутую в вертикальной плоскости ленту с образованием грузонесущей ветви с ее опиранием на подвесные роликоопоры и нерабочей ветви с ее опиранием на жестки прямые роликоопоры, закрепленные на раме (Полунин В.Т., Гуленко Г.Н. Конвейеры для горных предприятий. М., Недра, 1978, с.64-65, рис.2.16).
Однако недостатками известного ленточного конвейера являются невозможность его использования при транспортировании горной массы по уклонным и бремсберговым трассам из-за сложности улавливания обеих ветвей оборвавшейся ленты, возможность отклонения подвесных роликоопор в сторону движения ленты, возможность возникновения резонанса при взаимодействии ленты с подвесными роликоопорами, увеличенная высота става конвейера.
Техническим результатом изобретения является возможность использования ленточного конвейера в качестве подъемного, уклонного или бремсбергового без применения специальных устройств для улавливания оборвавшейся ленты, исключение отклонений подвесных роликоопор и резонансных явлений при взаимодействии с лентой, уменьшение высоты и ширины става конвейера, снижение нагрузок на подвесные роликоопоры грузонесущей ветви ленты.
Технический результат достигается тем, что в ленточном конвейере с подвесными роликоопорами, содержащем бесконечно замкнутую в вертикальной плоскости ленту с образованием грузонесущей и нерабочей ветвей с их опиранием на роликоопоры, закрепленные на раме, согласно изобретению нерабочая ветвь ленты эквидистантно размещена относительно грузонесущей ветви с возможностью ее взаимодействия своей верхней поверхностью с роликоопорами грузонесущей ветви по всей ширине нерабочей ветви ленты и ее опирания на свои подвесные роликоопоры, которые смещены относительно роликоопор грузонесущей ветви по длине конвейера в сторону, противоположную направлению движения грузонесущей ветви, на минимальную величину, допускающую проход стыковочных узлов ленты, а шаг расстановки роликоопор по длине става конвейера принят равным кратным шагу расстановки роликоопор на грузонесущей ветви, при этом ролики на грузонесущей и нерабочей ветвях ленты по ее ширине размещены в шахматном порядке.
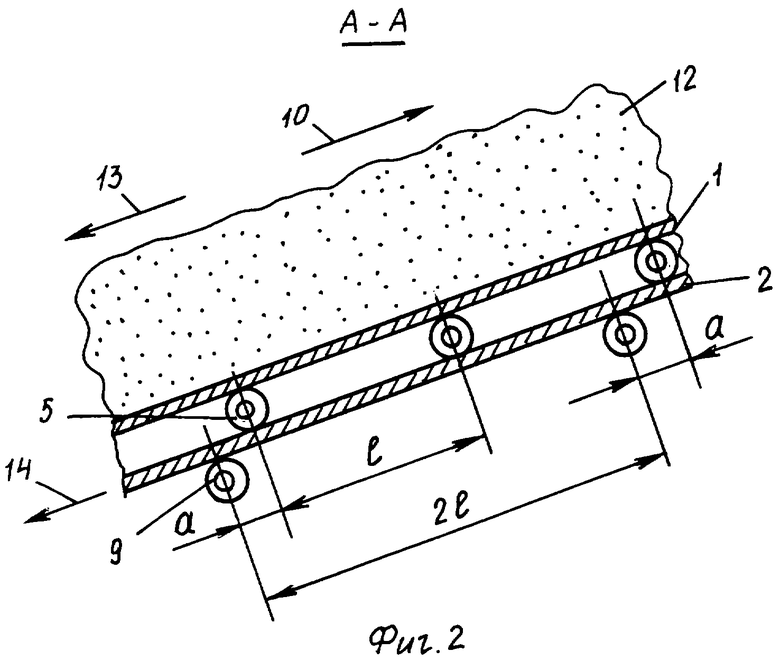
Ленточный конвейер с подвесными роликоопорами представлен на фиг.1 - поперечный разрез, на фиг.2 - разрез А-А по фиг.1.
Ленточный конвейер содержит бесконечно замкнутую в вертикальной плоскости ленту с образованием грузонесущей 1 и нерабочей 2 ветвей. Грузонесущая ветвь 1 ленты опирается на подвесные роликоопоры, состоящие из установленных на осях 3, соединенных между собой шарнирными узлами 4, роликов 5. Нерабочая ветвь 2 ленты эквидистантно размещена относительно грузонесущей ветви 1 с возможностью ее взаимодействия своей верхней поверхностью с роликами 5 роликоопор грузонесущей ветви 1 по всей ширине нерабочей ветви 2 ленты и ее опирания на свои подвесные роликоопоры. Роликоопоры нерабочей ветви 2 состоят из установленных на осях 6, соединенных шарнирными узлами 8, роликов 9. При этом роликоопоры нерабочей ветви 2 смещены относительно роликоопор грузонесущей ветви 1 по длине конвейера в сторону, противоположную направлению 10 движения грузонесущей ветви 1 (при нормальной работе конвейера) на минимальную величину а, допускающую проход стыковочных узлов ленты, а шаг расстановки роликоопор по длине става конвейера принят равным кратным шагу l расстановки роликоопор на грузонесущей ветви, например равен 2l. При этом ролики 5 на грузонесущей 1 и ролики 9 на нерабочей 2 ветвях ленты по ее ширине размещены в шахматном порядке.
Ленточный конвейер с подвесными роликоопорами действует следующим образом. При транспортировании горной массы 12 грузонесущей ветвью 1 ленты последняя поддерживается роликами 5 подвесных роликоопор, а нерабочая ветвь 2 ленты - роликами 9 своих подвесных роликоопор. При этом ролики 5 одновременно взаимодействуют как с грузонесущей 1, так и с нерабочей 2 ветвями ленты, вращаясь при работе конвейера на подъем горной массы 12 по часовой стрелке (фиг.2). Благодаря этому происходит частичная разгрузка несущих элементов роликоопор грузонесущей ветви 1 (осей 3 и шарнирных узлов 4) за счет передачи части нагрузки на существенно менее нагруженную нерабочую ветвь 2. Это позволяет увеличить ресурс роликоопор и надежность работы конвейера. Расположение роликов 5 и 9 в шахматном порядке друг относительно друга позволяет снизить контактные напряжения в нерабочей ветви 2 ленты при ее проходе между роликами 5 и 9 роликоопор. По этой же причине исключается возможность поворота роликоопор грузонесущей ветви 1 в направлении 10 ее движения, т.к. нерабочая ветвь 2 стремится повернуть эти роликоопоры в противоположном направлении 14. Кинематическая связь роликоопор грузонесущей 1 и нерабочей 2 ветвей через ролики 5 уменьшает вероятность возникновения резонансных явлений в системе опирания ленты при большой скорости ее движения. При обрыве любой ветви 1 или 2 ленты при работе конвейера на подъем горной массы 12 (подъемные и уклонные конвейеры) ее грузонесущая ветвь под действием синусоидальных составляющих ее веса и веса находящейся на ней горной массы 12 после остановки начинает двигаться вниз в направлении 13, стремясь вращать ролики 5 против часовой стрелки. Однако не меняющая своего направления движения (14) нерабочая ветвь 2 ленты одновременно будет стремиться вращать ролики 5 в противоположном направлении, что будет способствовать затормаживанию роликов 5. За счет сил трения между роликами 5 и обеими ветвями 1 и 2 ленты они обе останавливаются, благодаря чему и происходит улавливание ленты после ее обрыва. При обрыве ленты бремсбергового конвейера ее грузонесущая ветвь 1 продолжает двигаться в направлении 13, как и до обрыва, а нерабочая ветвь 2 после остановки меняет направление своего движения на обратное, двигаясь в направлении 14, т.е. в том же направлении, что и грузонесущая ветвь 1. Поэтому механизм улавливания ленты аналогичен описанному выше. При этом в обоих случаях обеспечивается надежный контакт нерабочей ветви 2 с роликами 5 роликоопор грузонесущей ветви за счет того, что ролики 9 нерабочей ветви 2 смещены в сторону движения 14 нерабочей ветви 2 на минимальную величину а. Благодаря этому нерабочая ветвь 2 не провисает при уменьшении величины ее натяжения, которое происходит при обрыве ленты, а продолжает контактировать с роликами 5, способствуя их затормаживанию.
Прелагаемая схема размещения грузонесущей 1 и нерабочей 2 ветвей ленты позволяет также уменьшить высоту и ширину става конвейера, т.к. проекция прогнутой вниз нерабочей ветви 2 ленты меньше ее ширины. Это расширяет возможности использования предлагаемого конвейера на шахтах и рудниках.
Отличительные признаки изобретения обеспечивают возможность использования ленточного конвейера в качестве подъемного, уклонного или бремсбергового без применения специальных устройств для улавливания оборвавшейся ленты, исключение отклонений подвесных роликоопор и резонансных явлений при взаимодействии с лентой, уменьшение высоты и ширины става конвейера, снижение нагрузок на подвесные роликоопоры грузонесущей ветви ленты.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2011 |
|
RU2478551C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2408519C2 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНЫМИ РОЛИКООПОРАМИ | 2010 |
|
RU2457166C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2005 |
|
RU2281900C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2297961C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2411175C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2009 |
|
RU2405726C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326041C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2308406C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2326040C1 |
Изобретение относится к конвейеростроению, а именно к ленточным конвейерам на подвесных роликовых опорах, и может быть использовано для транспортирования горной массы как при горизонтальной, так и при наклонной установке конвейера. Конвейер содержит бесконечно замкнутую в вертикальной плоскости ленту с образованием грузонесущей и нерабочей ветвей с их опиранием на роликоопоры, закрепленные на раме. Нерабочая ветвь ленты эквидистантно размещена относительно грузонесущей ветви с возможностью ее взаимодействия своей верхней поверхностью с роликоопорами грузонесущей ветви по всей ширине нерабочей ветви ленты и ее опирания на свои подвесные роликоопоры, которые смещены относительно роликоопор грузонесущей ветви по длине конвейера в сторону, противоположную направлению движения грузонесущей ветви, на минимальную величину, допускающую проход стыковочных узлов ленты. Шаг расстановки роликоопор по длине става конвейера принят равным кратным шагу расстановки роликоопор на грузонесущей ветви. Ролики на грузонесущей и нерабочей ветвях ленты по ее ширине размещены в шахматном порядке. Технический результат - возможность использования ленточного конвейера в качестве подъемного, уклонного или бремсбергового без применения специальных устройств для улавливания оборвавшейся ленты, исключение отклонений подвесных роликоопор и резонансных явлений, уменьшение высоты и ширины става конвейера, снижение нагрузок на подвесные роликоопоры грузонесущей ветви ленты. 2 ил.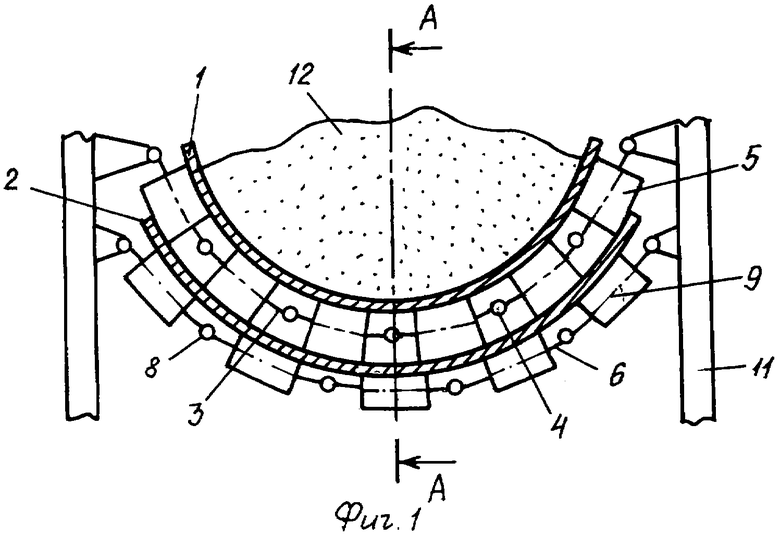
Ленточный конвейер с подвесными роликоопорами, содержащий бесконечно замкнутую в вертикальной плоскости ленту с образованием грузонесущей и нерабочей ветвей с их опиранием на роликоопоры, закрепленные на раме, отличающийся тем, что нерабочая ветвь ленты эквидистантно размещена относительно грузонесущей ветви с возможностью ее взаимодействия своей верхней поверхностью с роликопорами грузонесущей ветви по всей ширине нерабочей ветви ленты и ее опирания на свои подвесные роликоопоры, которые смещены относительно роликоопор грузонесущей ветви по длине конвейера в сторону, противоположную направлению движения грузонесущей ветви, на минимальную величину, допускающую проход стыковочных узлов ленты, а шаг расстановки роликоопор по длине става конвейера принят равным кратным шагу расстановки роликоопор на грузонесущей ветви, при этом ролики на грузонесущей и нерабочей ветвях ленты по ее ширине размещены в шахматном порядке.
| ПОЛУНИН В.Т., ГУЛЕНКО Г.Н | |||
| Конвейеры для горных предприятий | |||
| - М.: Недра, 1978, с.64-65, рис.2.16 | |||
| US 4166528 А, 04.09.1979 | |||
| Устройство для улавливания лентыКОНВЕйЕРА B СлучАЕ EE ОбРыВА | 1979 |
|
SU829507A1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 1998 |
|
RU2152896C2 |

