Изобретение относится к области ракетного вооружения, в частности - к низколетящим управляемым ракетам, а его способ боевого применения - к области применения управляемых ракет, в частности к применению управляемых ракет над водной поверхностью, пустыней, другими равнинными поверхностями.
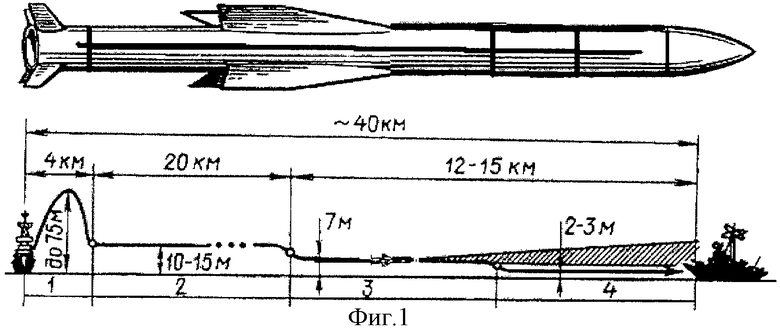
Известна противокорабельная ракета (ПКР) АМ.39 "Экзосет" [1] (фиг.1, аналог) нормальной аэродинамической схемы, имеющая корпус с системой наведения, боевой частью и двигателем, складывающееся крестообразное крыло и рули, обладающая свойствами продольной устойчивости на высотах выше 0,5 м. Однако ракета становится неустойчивой при снижении высоты полета над морской поверхностью ниже 0,5 м из-за влияния экранного эффекта (влияния постилающей поверхности) и турбулентности атмосферы на границе двух сред (море - атмосфера) [8, 10]. В условиях полета с периодическим изменением направления вертикальных порывов атмосферной турбулентности угол атаки ракеты получает периодические приращения угла атаки, коэффициент аэродинамической силы Сy также периодически изменяется со скачками от максимального значения до минимального с изменением знака (или от минимального до максимального значения - в зависимости от направления движения волн). Это приводит к раскачиванию ракеты в продольном канале с запаздыванием относительно фронта волны около четверти ее периода. Такое движение в непосредственной близости от морской поверхности приводит к приводнению ракеты.
Известен способ боевого применения АМ.39 "Экзосет" [1]. Для того чтобы сделать менее заметной после пуска ракету АМ.39 "Экзосет", ее переводят в режим планирования без включения двигателя с высоты 50...10000 до 10...15 м, при этом высоту полета и статистические параметры морской поверхности определяют с помощью высотомера. Далее запускают маршевый двигатель и переводят ракету в режим стабилизации заданной высоты 10-15 м. Далее по мере приближения к цели ступенчато изменяют высоту полета ракеты на среднем участке до 7 м, а на конечном - до 2-3 м. Скорость полета на этом этапе 0,85 М. Однако недостатком способа боевого применения указанной ракеты является то, что на этапе планирования без включения двигателя ракета менее заметна только для оптических средств обнаружения, обнаружение ракеты средствами радиолокационного диапазона происходит в штатном режиме - данная цель ими легко обнаруживается. На конечном этапе ракета, летящая с такой скоростью в данном диапазоне высот при соответствующем волнении моря, несмотря на снижение высоты полета, легко обнаруживается корабельными средствами обнаружения и с большой вероятностью уничтожается зенитно-ракетными и артиллерийскими комплексами самообороны. В способе боевого применения ракеты не используется возможность полета в непосредственной близости над поверхностью воды на высоте ниже 0,5 м.
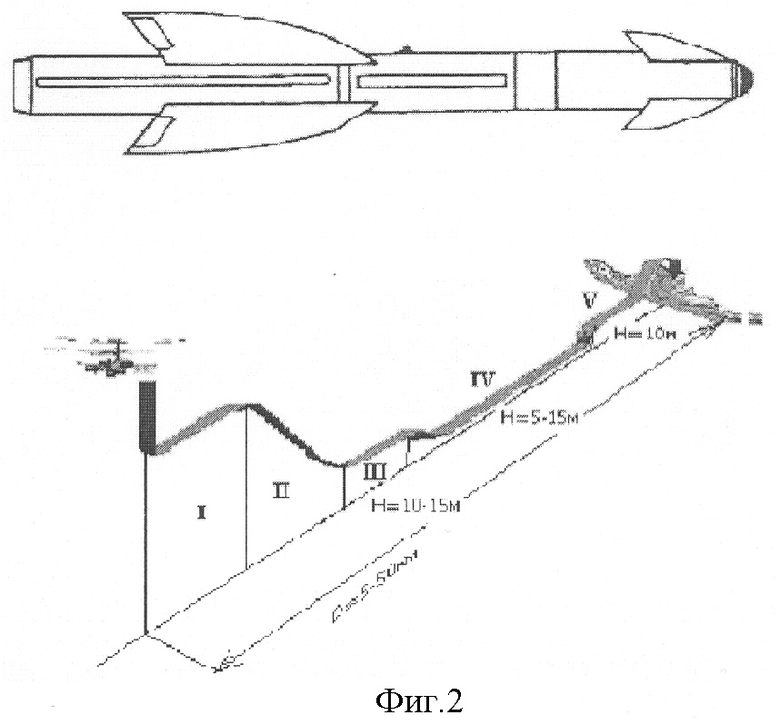
Известна противокорабельная ракета AGM-119A "Пингвин-3" [1] (аналог, фиг.2) аэродинамической схемы "утка", содержащая корпус с системой наведения, боевой частью и двигателем, узлы стыковки с носителем, складное крестообразное основное крыло с элеронами и крестообразные аэродинамические рули над обшивкой носовой части, имеющая удовлетворительные характеристики переходных процессов при полете на высотах выше 0,5 м. Недостатком указанной ракеты является неустойчивый полет при снижении высоты полета ниже 0,5 м из-за влияния экранного эффекта и турбулентности атмосферы на границе двух сред (море - атмосфера) [8, 10]. В условиях полета с периодическим изменением направления вертикальных порывов атмосферной турбулентности угол атаки ракеты получает периодические приращения угла атаки. Как следствие, периодически изменяется коэффициент аэродинамической силы Сy со скачками с максимального значения до минимального (или с минимального до максимального значения - в зависимости от направления движения волн) с изменением знака. Это приводит к раскачиванию ракеты в продольном канале с запаздыванием относительно фронта волны около четверти периода волны - ракета становится неустойчивой, что при движении в непосредственной близости от водной поверхности приводит к ее приводнению.
Известен способ боевого применения крылатой ракеты AGM-28B Hound Dog [2] (аналог), согласно которому ракету после пуска и набора высоты с целью скрытности боевого применения переводят в горизонтальный полет на заданной высоте 15-18 км, после чего с помощью инерциальной системы наведения по введенным координатам наводят на наземную цель. Однако основной недостаток ракеты AGM-28 Hound Dog - уязвимость от средств ПВО. Ракета, несмотря на увеличение высоты до 15-18 км, при максимальной скорости 580 м/с на значительном расстоянии от цели легко обнаруживается радиолокационной станцией (РЛС) и с большой вероятностью поражается истребителем-перехватчиком или ракетами зенитно-ракетных комплексов. В способе боевого применения ракеты не используется возможность полета над равнинной местностью (спокойной водной поверхностью) в непосредственной близости от поверхности земли на высоте менее 1 м с целью сделать его более скрытным.
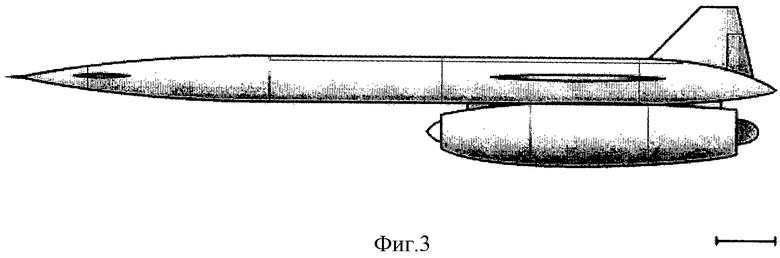
Наиболее близким по совокупности существенных признаков конструкции является крылатая ракета аэродинамической схемы "утка" AGM-28В (GAM-77) Hound Dog [2] (прототип, фиг.3), содержащая корпус с системой наведения, боевой частью и двигателем, подвешенным в гондоле к хвостовой части корпуса, плоское основное крыло с элеронами, киль с рулем направления и расположенные впереди горизонтальные рули, обладающая свойствами устойчивого полета в диапазоне высот 0,001-18 км при выполнении боевой задачи - скрытной доставки боевой части к цели. Однако указанная ракета с целью скрытности боевого применения не может совершать устойчивый полет над ровной поверхностью (пустынной, равнинной, водной с небольшим волнением поверхности (до 3 баллов)) на высоте менее 1 м. В результате возмущений любое отклонение по высоте приведет к уходу с этого диапазона высот или падению ракеты. Для устойчивого полета ракета должна обладать статической или динамической продольной устойчивостью на указанной высоте по отношению к внешним возмущениям атмосферы над земной поверхностью и проявлениям экранного эффекта (влиянию постилающей поверхности). Статической и динамической продольной устойчивостью на высоте менее 1 м указанная ракета не обладает, и боевое применение этой ракеты на такой высоте не представляется возможным.
Известен способ боевого применения AGM-119A "Пингвин-3" [1] (прототип способа боевого применения, фиг.2), где после пуска ракету AGM-119A "Пингвин-3" снижают до высоты 15 м, при этом с помощью высотомера определяют высоту полета и статистические параметры морской поверхности. Далее ракету переводят в режим стабилизации высоты полета 10-15 м. По достижении запрограммированной дальности до цели ракету переводят на минимально допустимую высоту полета для этой ракеты на маловысотной траектории 5-15 м (в зависимости от состояния морской поверхности). Затем после включения головки самонаведения высоту полета снова увеличивают до 10 м. Средняя скорость полета 290 м/с. Однако несмотря на снижение на конечном участке недостатком указанной ракеты, летящей с такой скоростью в данном диапазоне высот, является ее большая контрастность. Указанный способ боевого применения ракеты не использует возможность полета на траектории непосредственно над поверхностью воды на высоте менее 0.5 м, поэтому указанная ракета (AGM-119A) легко обнаруживается радиолокационными и оптическими средствами обнаружения кораблей и с большой вероятностью уничтожается зенитно-ракетными и артиллерийскими комплексами самообороны. Таким образом, живучесть ракеты обусловлена только погодными условиями, недостатком времени зенитно-ракетного комплекса (ЗРК) при атаке залпа ракет, неисправностями и ограничениями средств ПВО корабельных группировок. Снижение контрастности ракеты путем приближения к взволнованной морской поверхности (до высот менее 0,5 м), обладающей высоким уровнем фоновых помех, значительно увеличило ее живучесть в результате ее необнаружения, срыва наведения при удачном захвате или позднего обнаружения средствами обнаружения противовоздушной обороны (ПВО).
Задачей, на решение которой направлено изобретение, является улучшение характеристик продольной устойчивости полета ракеты, выбранной в качестве прототипа, на предельно малых высотах, а именно на отстояниях 0,05-0,2 в долях средней аэродинамической хорды всах основного крыла, т.е. в непосредственной близости от поверхности экрана.
Задача, на решение которой направлен заявленный способ боевого применения, - сделать применение заявленной ракеты более скрытным, в частности снизить контрастность ракеты, и, как следствие, вероятность обнаружения и устойчивого слежения ракеты системами и устройствами обнаружения и наведения средств ПВО противника.
Технический результат, который обеспечивается изобретением, заключается в том, что на предельно малых высотах (0,05-0,2 всах) в полете над экранирующей поверхностью (морской, пустынной, другой равниной поверхностью) в расширенном диапазоне внешних возмущений за счет определенного выбора аэродинамической компоновки и формы переднего горизонтального оперения (ПГО) обеспечивается известный эффект самостабилизации экранолетов и экранопланов аэродинамической схемы "утка" [3, 5], обеспечивающий улучшение статической и динамической продольной устойчивости ракеты. При достаточной тяге двигателя данный эффект достигается тем, что в ПГО используется влияние ее передней несущей поверхности на заднюю во всем диапазоне отстояний, за счет которого случайные возмущения скоростного потока, вызывающие увеличения угла тангажа ракеты ϑ в рабочем диапазоне (0-8°), не вызывают значительного приращения подъемной силы на переднем горизонтальном оперении. Это создает условия, обеспечивающие расширение диапазонов самостабилизации полета ракеты, в частности при встречно-боковых ветровых порывах не дает ракете выйти из диапазона заданных малых высот полета.
Под самостабилизацией понимается способность летательного аппарата не выходить за границы отстояний h от экрана и углов тангажа ϑ во всем диапазоне возможных ветро-волновых возмущений, заданных для данного класса ракет при их проектировании.
Указанный эффект на экранопланах схемы "утка" с обычным ПГО при правильном выборе аэродинамических плеч, площадей и установочных углов несущих поверхностей проявляется на отстояниях, соответствующих долям средней аэродинамической хорды (САХ) 0,05-0,2 всах основного крыла [5]. В данном случае эффект самостабилизации, обеспечивающийся предлагаемым ПГО с новой геометрией, расширяет диапазон проявления данного эффекта до отстояний 0,02-0,5 всах. Это объясняется тем, что при действии на ракету внешних встречных возмущений атмосферы вихревые жгуты, сходящие с передней части ПГО, формируют на нижней поверхности задней части ПГО такое поле местных скоростей, которое (с учетом происходящего затенения) компенсирует (а при определенной геометрии ПГО даже и превосходит) рост разряжения на верхней поверхности задней части ПГО. Такая аэродинамическая интерференция приводит к отсутствию роста (а при определенной геометрии ПГО даже и к падению) подъемной силы на таком ПГО с увеличением его угла атаки в более широких границах изменения угла тангажа ракеты и на больших относительных отстояниях.
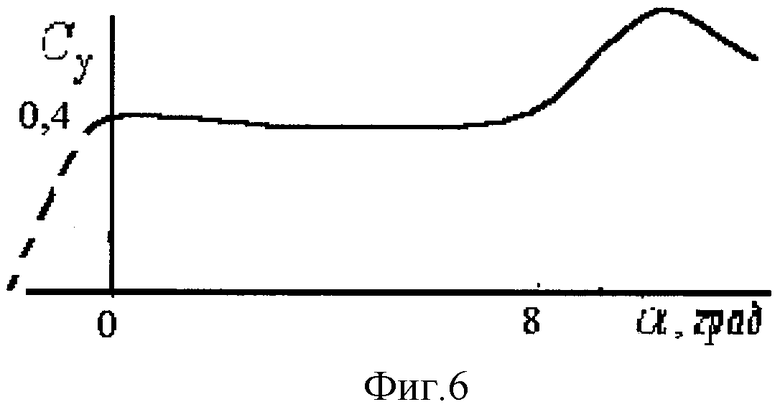
Таким образом, передняя несущая поверхность "обратнощелевого" ПГО служит не для образования подъемной силы, а для вихреобразования и затенения задней части. Эти два явления в совокупности дают возможность изменить градиент общей подъемной силы "обратнощелевого" ПГО при увеличении угла атаки (сделать его минимальным, нулевым и даже отрицательным - в зависимости от задач, стоящих в аэродинамическом проектировании), тем самым, улучшая характеристики продольной устойчивости экранолета. Эффект самостабилизации наблюдается и при уменьшении угла атаки в рабочем диапазоне (фиг.6). Таким образом, при воздействии возмущений атмосферы основное крыло вследствие приращения подъемной силы изменяет свое положение, а переднее горизонтальное оперение свое положение сохраняет, что приводит в свою очередь к стабилизации отстояния от экрана и угла тангажа в заданных диапазонах.
Кроме того, согласно [7], траектория прохождения заявленной ракеты - область проявления экранного эффекта - располагается ниже области вихревых возмущений приводного слоя атмосферы. При волнении до 3 баллов отсутствие значительных вертикальных составляющих воздушного потока предотвращает выход угла атаки ракеты за допустимые значения и позволяет сводить ограничения угла атаки к ограничению угла тангажа ϑ.
В качестве преимущества ракеты аэродинамической схемы "утка" необходимо отметить, что высокое аэродинамическое качество в минимальной степени компенсируется потерями на балансировку. Заявленное высокое аэродинамическое качество летательных аппаратов, построенных по принципу экранолета схемы "утка", позволяет уменьшить в режиме экранного полета мощность двигателя в 2,5-3 раза [4], что позволит значительно увеличить дальность ракеты. Ко всему сказанному, необходимо добавить, что данная конструкция ракеты имеет меньшие площади переднего горизонтального оперения, чем площади переднего горизонтального оперения экранолетов подобного типа, что наилучшим образом отвечает требованиям к массогабаритным параметрам ракеты.
Указанный технический результат изобретения обеспечивается тем, что в известной ракете, выбранной прототипом и содержащей корпус с системой наведения, боевой частью, силовой установкой, узлы стыковки с носителем, основные крылья с рулевыми поверхностями, расположенные впереди горизонтальные рули, киль с рулем направления, компоновка доработана передним горизонтальным оперением, изготовленным из того же материала, что вся конструкция ракеты, состоящим из двух соединенных между собой центральным пилоном последовательно расположенных вдоль продольной оси ракеты задней несущей поверхности и передней несущей поверхности, которое выполнено с "обратной щелью", т.е. передняя кромка задней несущей поверхности расположена выше задней кромки передней несущей поверхности, при этом установочный угол α1 между продольной осью ракеты и базовой плоскостью передней несущей поверхности переднего горизонтального оперения лежит в интервале - 3-16°, а установочный угол α2 между продольной осью ракеты и базовой плоскостью задней несущей поверхности переднего горизонтального оперения лежит в интервале 0,5-20°, геометрическая форма в плане передней несущей поверхности имеет вид равнобедренного треугольника с углом стреловидности χ, лежащим в интервале (45-75°), а форма в плане задней несущей поверхности имеет вид симметричного относительно продольной оси ракеты пятиугольника вершиной вниз.
Причем соотношения размеров НТО имеют следующие диапазоны: соотношение площадей передней несущей поверхности к задней несущей поверхности (9/10-1/5); соотношение в САХ передней несущей поверхности к САХ задней несущей поверхности (95/100-1/3); размах передней несущей поверхности меньше размаха задней несущей поверхности и находится в соотношении (1-1/4).
В свою очередь, двигатель доработан верхним воздухозаборником, что в совокупности делает возможным возникновение эффекта самостабилизации продольного канала при воздействии возмущений атмосферы.
Сущность заявленного изобретения состоит в обеспечении максимума продольной устойчивости ракеты при полете на предельно малых высотах за счет взаимодействия переднего горизонтального оперения особой формы, которым доработан корпус ракеты, выбранной в качестве прототипа, с воздушным потоком над экранирующей поверхностью, в результате которого возникает эффект самостабилизации ракеты в продольной плоскости, состоящий в способности ракеты сохранять отстояние от экрана и угол тангажа в заранее заявленном диапазоне при эксплуатационных возмущениях описанного выше воздушного потока.
Технический результат, который обеспечивается заявленным способом боевого применения, заключается в том, что со снижением высоты полета над экранирующей поверхностью изменяется влияние факторов, влияющих на обнаружение и наведение системами и устройствами средств ПВО противника, что в целом и приводит к снижению контрастности ракеты для этих средств обнаружения оптического и радиолокационного диапазона, и, как следствие, к большей скрытности способа боевого применения. В частности, факторами, изменяющимися при обнаружении со снижением высоты над морской поверхностью в радиолокационном диапазоне, являются изменение фона обнаружения (атмосфера - морская поверхность) и повышение уровня помех морской поверхности при изменении угла визирования ракеты, в оптическом диапазоне - изменение фона обнаружения (атмосфера - морская поверхность), изменение полного содержания водяного пара на пути луча W от ракеты с пункту обнаружения, сближение ракеты с фоновой поверхностью, увеличение времени реакции зенитно-ракетных и артиллерийских комплексов, многократное отражение изображения ракеты от волн. Факторами, изменяющимися при обнаружении со снижением высоты над земной поверхностью в радиолокационном диапазоне, является изменение фона обнаружения (атмосфера - постилающая поверхность), в оптическом диапазоне - изменение фона обнаружения (атмосфера - постилающая поверхность), сближение ракеты с фоновой поверхностью.
Выделение ПКР, летящей на высоте Н=5 м, для поста станции обнаружения, находящегося на такой же высоте на удалении 10 км, не представляет затруднений, так как происходит на фоновой поверхности слоя атмосферы над линией горизонта. В этих условиях для корабля, производящего обнаружение воздушных целей, любое превышение по высоте РЛС поиска над целью болезненно скажется на ее нормальном функционировании, так как будет происходить над морской поверхностью. Это также относится к ракетам ЗРК, совершающим перехват ПКР. Если траектория зенитной управляемой ракеты (ЗУР) превышает траекторию ПКР, захват цели ее радиолокационной головкой самонаведения (ГСН) будет значительно затруднен. В противовес, снижение высоты полета ракеты приводит к улучшению условий обнаружения надводной цели активной радиолокационной головкой самонаведения самой ПКР. Это также связано с уменьшением влияния водной поверхности вследствие превышения цели над линией горизонта, что создает более благоприятные условия наведения ПКР.
Даже если обнаружение происходит только на фоне морской поверхностью снижение высоты ракеты до предельно малой, соответствующей долям САХ 0,05-0,2 всах ухудшает условия обнаружения, поскольку приводит к изменению угла ее визирования цели в вертикальной плоскости ε системами и устройствами обнаружения и наведения средств ПВО противника, что приводит к увеличению уровня помех взволнованной морской поверхности, являющейся постилающей. Чем угол ε больше, тем выше уровень помех морской поверхности, тем труднее выделить цель. При поиске цели, если ее сигнал цели не превышает порогового значения относительно фонового значения, РЛС продолжает поиск, не захватывая цель. Таким образом, чем меньше превышение высоты полета ПКР над постом станции обнаружения, тем цель менее выделяема на фоне морской поверхности.
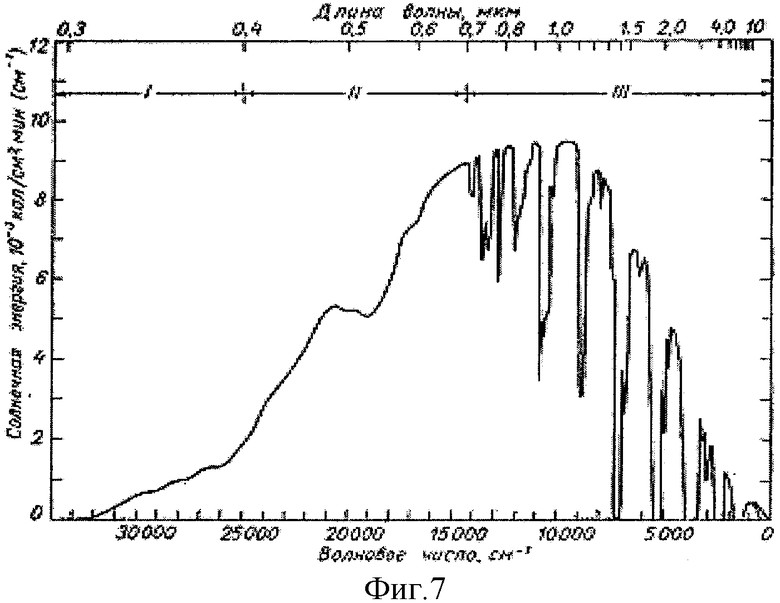
Так же, как и для систем радиолокационного обнаружения, фактором, создающим меньшую контрастность, является тот факт, что выделение цели над морской поверхностью постом обнаружения, находящимся на высоте 5 м, современных ПКР, совершающих маловысотный полет на такой же высоте, происходит в фоне приводного слоя атмосферы над морской поверхностью, в то время как обнаружение ПКР, летящих ниже большую половину времени, происходит на фоне морской поверхности. Фон морской поверхности определяется альбедо морской поверхности, величина которого определяется как отношение потока солнечной радиации, отраженного данной поверхностью по всем направлениям к потоку, упавшему на эту поверхность. Несмотря на зависимость альбедо от многих факторов (высоты солнца  , волнения моря V, облачности N и др.), его фон всегда больше фона приводного слоя атмосферы над морской поверхностью, поскольку окна прозрачности (С и D-окно - 3,5-5 мкм и 8-12 мкм, УФ-поддиапазон - 0,25-0,3 мкм) практически его лишены. Распределение энергии солнечного излучения на уровне моря приведено на фиг.7 [7].
, волнения моря V, облачности N и др.), его фон всегда больше фона приводного слоя атмосферы над морской поверхностью, поскольку окна прозрачности (С и D-окно - 3,5-5 мкм и 8-12 мкм, УФ-поддиапазон - 0,25-0,3 мкм) практически его лишены. Распределение энергии солнечного излучения на уровне моря приведено на фиг.7 [7].
Повышенная влажность траектории прохождения луча при обнаружении в условиях непосредственной близости моря является определяющим фактором оптических свойств атмосферы как для сложных и простых метеоусловий. Для оптических станций, кроме локальных характеристик влажности: упругости водяного пара e; упругости насыщения Е и относительной влажности e/E, необходимо знать полное содержание водяного пара на пути луча w. Естественно, что влажность траектории прохождения луча маловысотных ПКР гораздо выше, чем у ПКР, летящих на высотах выше Н=5 м, вследствие большей влажности в непосредственной близости к водной поверхности.
Обнаружение ПКР, летящих на высоте меньше 5 м, происходит позже вследствие того, что они позже появляются из-за горизонта. Расчет показывает что длина просматриваемой траектории для ПКР, летящей на высоте Н=5 м, длиннее, чем у ПКР, летящей на высоте H=3 м, на 3300 м.
Как правило, пункт обнаружения находится выше 5 м, и обнаружение происходит на фоне морской поверхности. В этом случае постилающая поверхность моря - основной источник помех для низколетящих ракет по траектории лучей к посту обнаружения находится ближе к ПКР. Учитывая усиленное поглощение в зоне повышенной влажности (вследствие непосредственной близости к морской поверхности) более длинный ход луча от фоновой морской поверхности к посту обнаружения ведет к ослаблению уровня фона. Таким образом, в этих условиях контрастность цели с увеличением ее высоты полета увеличивается.
Многократные отражения ПКР, летящей в непосредственной близости то морской поверхности, от волн приводят к размытию изображения ракеты. На больших высотах помехи отражения ПКР волнами системам, работающим в оптическом диапазоне, практически не сказываются, что также является фактором снижения заметности низколетящих ПКР.
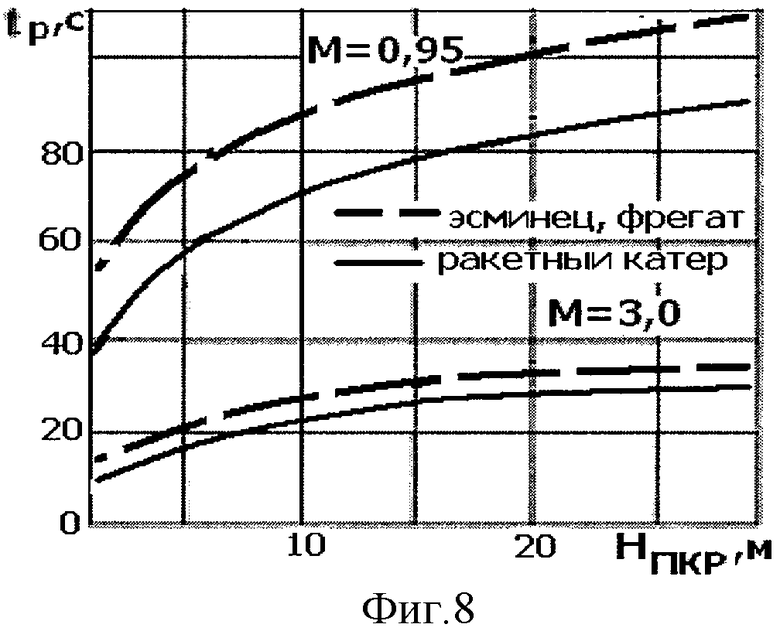
Кроме того, снижение высоты полета ПКР увеличивает время реакции ракетных и корабельных артиллерийских комплексов стран НАТО (фиг.8). Время разворота по азимуту и углу места цели этих комплексов, по мнению иностранных специалистов, если они не автономны, а ориентированы на получение исходных данных для стрельбы от общекорабельных средств, даже в условиях хорошей видимости целей вследствие их медлительности не всегда позволяет обеспечить надежность противоракетной обороны. Положение особенно усугубляется при залпе низколетящих ракет, когда на уничтожение каждой ракеты отводится строго определенное время, а время реакции комплекса возрастает [11].
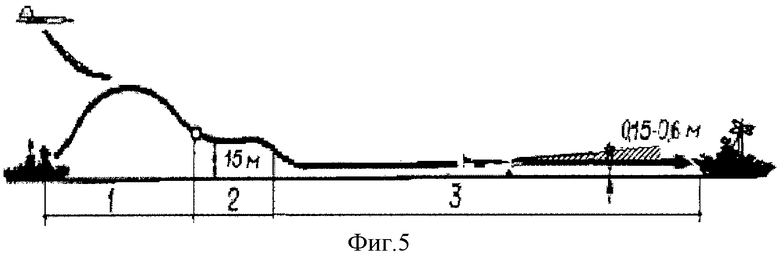
Указанный технический результат способа боевого применения заявленной ракеты обеспечивается тем, что ракету после пуска снижают до высоты 15 м и переводят в режим стабилизации полета на этой высоте, при этом контроль высоты полета и параметров волнения морской поверхности осуществляют при помощи высотомера, отличается от прототипа тем, что далее ракету переводят в режим перехода в экранный режим путем снижения до расчетной высоты, соответствующей долям САХ 0,05-0,2 всах, далее продолжают полет в экранном режиме на этой высоте, причем необходимый уровень устойчивости в продольной плоскости и отстояние от экранирующей поверхности достигают путем изменения тяги двигателя - увеличением при уменьшении отстояния, и наоборот; в боковом канале в режиме экранного полета ракету наводят согласно способу наведения до скрытного поражения цели, что обеспечивается непосредственной близостью постилающей поверхности - основного источника помех;
в случае изменения параметров экранирующей поверхности выше эксплуатационных допущений (для морской поверхности - увеличения частоты прохождения морских волн, увеличения волнения морской поверхности волн) путем увеличения высоты ракету переводят в режим выхода из экранного режима в режим прямолинейного полета на высоту слабовозмущенного воздушного потока (4,5-5 м).
Сущность заявленного способа боевого применения состоит в снижении ракеты на конечном участке наведения до траектории, обладающей предельно малой высотой полета над постилающей поверхностью, это способствует достижению меньшей контрастности ракеты на фоне постилающей поверхности, что снижает вероятность ее обнаружения и уничтожения средствами ПВО.
Область применения заявленного способа боевого применения равнинная местность (пустынная, снежная или ледяная гладь, степи с невысокой травой, др.) или водная поверхность с волнением до 3 баллов (море, океан, заливы, устья рек). Преимущество ракеты проявляется в простых метеоусловиях: ясной погоде, беспомеховой радиолокационной ситуации (для морской поверхности - волнении, близкому к штилевому), когда не наблюдается аномального распространения радиоволн, в условиях, когда постилающая поверхность является единственным источником помех и полет над ней на предельно малой высоте значительно снизит вероятность обнаружения ракеты.
На фиг.1 (аналог) изображена схема боевого применения ПКР АМ.39 "Экзосет" нормальной аэродинамической схемы, после пуска ракету переводят в режим планирования без включения двигателя с высоты 50...10000 до 10...15 м, далее переводят в режим стабилизации заданной высоты и по мере приближения к цели ступенчато снижают высоту полета ракеты на среднем участке до 7 м, а на конечном - до 2-3 м.
На фиг.2 (прототип способа боевого применения) изображена схема боевого применения ПКР AGM-119A "Пингвин-3" аэродинамической схемы "утка". Ракету после пуска снижают до высоты 15 м, переводят на минимально допустимую высоту полета на маловысотной траектории 10-15 м, переводят на предельно малую высоту 5-15 м, затем после включения головки самонаведения высоту полета снова увеличивают до 10 м.
На фиг.3 (прототип) изображен внешний вид ракеты AGM-28, которая принята в качестве прототипа, аэродинамической схемы "утка", содержащая корпус, систему наведения, боевую часть, турбореактивный двигатель, подвешенный в гондоле к хвостовой части корпуса, крыло дельтовидной формы симметричного профиля, элероны, руль направления и расположенные впереди горизонтальные рули.
На фиг.4 (предлагаемое изобретение) изображен внешний вид ракеты аэродинамической схемы "утка", самостабилизирующейся за счет экранного эффекта. Ракета состоит из корпуса 1 с системой наведения, боевой частью, двигателем, узлов стыковки с носителем 2, основных складных плоских крыльев 3 с рулевыми поверхностями и переднего горизонтального оперения с рулем высоты, киля с рулем направления 6. Переднее горизонтальное оперение описываемой дозвуковой противокорабельной ракеты, выполненное в виде двух жестко соединенных между собой центральным пилоном последовательно расположенных с перекрытием вдоль продольной оси ракеты несущих профилированных поверхностей - передней 4 и задней 5.
Способ боевого применения ракеты реализуется следующим образом. Ракета до пуска подвешена на узлах стыковки с носителем 2 на пусковом устройстве, основные крылья 3, задняя и передняя несущие поверхности ПГО 5 и 4 и киль 6 сложены внутри фюзеляжа, после пуска перечисленные поверхности раскладываются в полетное положение, ракету снижают до высоты 15 м, после переводят в экранный режим на минимально допустимую высоту полета, соответствующую долям САХ 0,05-0,2 всах, после чего наводят ее на этой высоте до поражения цели.
На фиг.5 изображена схема боевого применения заявленной ракеты аэродинамической схемы "утка".
На фиг.6 изображена зависимость изменения Cy от α ПГО заявленной ракеты, которая указывает на отсутствие в рабочем диапазоне угла атаки α (0-8°) приращений Cy.
На фиг.7 изображено распределение энергии солнечного излучения на уровне моря [7]. Современные системы оптического диапазона работают в инфракрасном диапазоне спектра в двух основных окнах прозрачности атмосферы (С и D-окно - 3,5-5 мкм и 8-12 мкм). Перспективным в этом плане является УФ-поддиапазон (0,25-0,3 мкм), который оказывается достаточно прозрачным и лишенным естественного солнечного фона для использования при решении задач поиска ПКР
На фиг.8 изображена зависимость времени реакции ЗРК и ЗАК от высоты полета поражаемой ракеты.
Список использованной литературы
1. Волковский Н.Л. Энциклопедия современного оружия и боевой техники. Изд. "Полигон", Москва - Санкт-Петербург, 2002 г., стр.351.
2. Краснов А. Боевое применение крылатых ракет воздушного базирования. Зарубежное военное обозрение, 2001 г., №2, стр.30-31.
3. Попов К.Б., Стерхов А.П., Гусев И.Н. Экранопланы Иркутского государственного технического университета // Восточно-Сибирский авиационный сборник. Иркутск, 2001. С.8-16.
4. Автомобили, корабли, самолеты... Под ред. М.Д. Аксенова. - М.: "Аванта+", 2000 г., стр.123.
5. А.с. 1316170 СССР. МКИ В60V 1/08. Экранопланы по схеме "утка". / Попов К.Б., Гусев И.Н. и др. / Опубл. 27.11.85.
6. Супруненко С. Безопасность входа экраноплана в режим экранного полета. М: Техника воздушного флота. 2003 г., №2.
7. Кондратьев К.Я. Радиационные характеристики атмосферы и земной поверхности. Гидрометеорологическое издание. Ленинград: 1969 г.
8. Даниел Д. Анализ параметров движения ракет, летящих низко над поверхностью моря, при различных состояниях последнего. Авиастроение, М.: ВИНИТИ, 1992, №28, стр.33-46.
9. Ефимов В.В., Сизов А.А. Экспериментальное исследование поля скорости ветра над волнами // Изв. АН СССР, ФАИО, 1969, T. V, №9, с.930-943.
10. Попов А.К. Влияние вихревых возмущений приводного слоя атмосферы на аэродинамические характеристики тонкого профиля. Восточно-сибирский авиационный сборник. Иркутск. 2001, стр.73.
11. Викторов С. Снаряды против ракет. Морской сборник, 1984, №10.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОСТАБИЛИЗИРУЮЩИЙСЯ ЭКРАНОПЛАН | 2013 |
|
RU2543431C1 |
| САМОСТАБИЛИЗИРУЮЩИЙСЯ ЭКРАНОПЛАН | 2008 |
|
RU2424137C2 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2690142C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2699514C1 |
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| ЛЕТАЮЩИЙ РОБОТ-НОСИТЕЛЬ РАКЕТ КОРАБЕЛЬНОГО И ВОЗДУШНОГО БАЗИРОВАНИЯ | 2018 |
|
RU2711430C2 |
| ПРОТИВОКОРАБЕЛЬНЫЙ РАКЕТНЫЙ КОМПЛЕКС С ЛЕТАЮЩИМ РОБОТОМ-НОСИТЕЛЕМ РАКЕТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2706295C2 |
| МНОГОЦЕЛЕВАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ РАКЕТНАЯ СИСТЕМА | 2022 |
|
RU2791754C1 |
| СПОСОБ БОЕВОГО ПРИМЕНЕНИЯ РАКЕТЫ | 2006 |
|
RU2325613C2 |
Предлагаемое изобретение относится к области ракетного вооружения, в частности к применению управляемых ракет над водной поверхностью, пустыней, другими равнинными поверхностями. Ракета содержит корпус с системой наведения, боевой частью и двигателем с верхним воздухозаборником, узлы стыковки с носителем, складные основные крылья с элеронами, киль с рулем направления и расположенные впереди горизонтальные рули. Ракету после пуска снижают до высоты 15 м, после чего при контроле высоты полета и параметров постилающей поверхности при помощи высотомера переводят на участок маловысотной траектории, продолжают полет в экранном режиме на этой высоте до поражения цели. Изобретение обеспечивает большую скрытность наведения ракеты с использованием естественных фоновых помех постилающей поверхности и, как следствие, большую вероятность поражения цели. 2 н.п. ф-лы, 8 ил.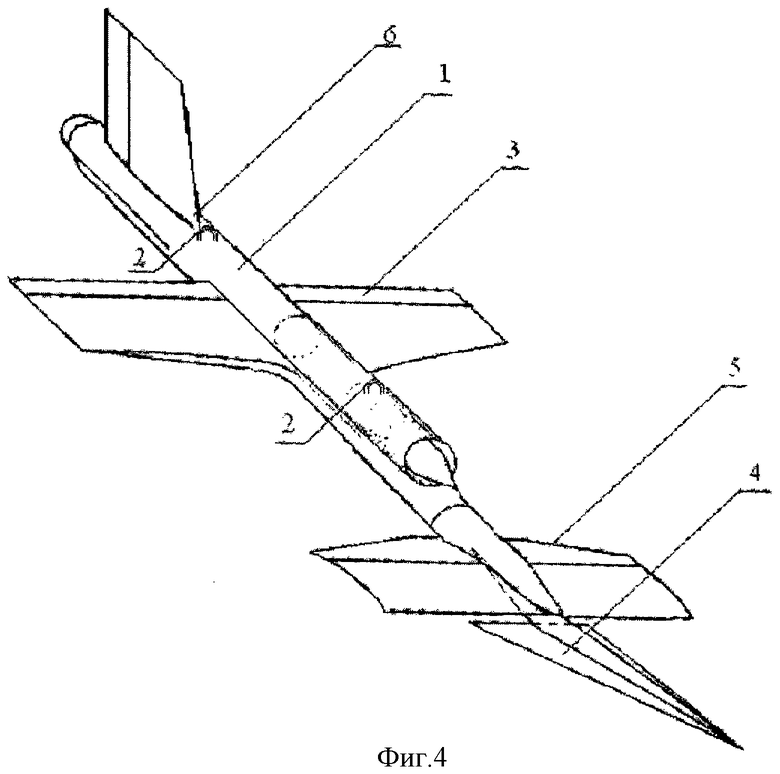
| ВОЛКОНСКИЙ Н.Л | |||
| Энциклопедия современного оружия и боевой техники | |||
| - М.-СПб.: Полигон, 2002, с.351 | |||
| КРАСНОВ А | |||
| Зарубежное военное обозрение | |||
| Боевое применение крылатых ракет воздушного базирования, 2001, №2, с.30-31 | |||
| РАКЕТА | 1996 |
|
RU2094748C1 |
| АВИАЦИОННАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2259536C1 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБЫ, ВЫПОЛНЕННОЙ ПО СХЕМЕ "УТКА", С ЛАЗЕРНОЙ ФЛЮГЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2251656C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2002 |
|
RU2233423C2 |
| Устройство для дистанционного программного управления электроприводными механизмами | 1984 |
|
SU1257614A1 |

