Изобретение относится к технике неразрушающего контроля металлических изделий ультразвуковым методом.
При проведении неразрушающего контроля металлических изделий ультразвуковым методом широкое распространение получили электромагнитные акустические преобразователи (ЭМА преобразователи), позволяющие сформировать акустическую волну в металле контролируемого объекта без использования контактной жидкости, через ржавчину или лакокрасочное покрытие. Принцип действия ЭМА преобразователей основан на формировании акустической волны в результате взаимодействия в поверхностном слое металла контролируемого объекта первичного и наведенного токов.
ЭМА преобразователи состоят из узла подмагничивания и излучателя. Узел подмагничивания представляет собой электромагнит или постоянный магнит. Излучатель представляет собой катушку или набор элементарных нитей-проводников, расположенных в непосредственной близости от поверхности контролируемого объекта или изделия.
Известен ЭМА преобразователь (см. Шкарлет Ю.М. Бесконтактные методы ультразвукового контроля. М.: Машиностроение, 1974, с.56.), предназначенный для ультразвукового контроля листового металла. ЭМА преобразователь состоит из узла подмагничивания и излучателя. В свою очередь, узел подмагничивания представляет собой мощные концентраторы магнитного поля, расположенные с двух сторон контролируемого листа металла. Излучатель представляет собой спиральную катушку, расположенную между контролируемой поверхностью и торцом одного из концентраторов магнитного поля. Схема построения ЭМА преобразователя не позволяет проводить контроль металлических объектов, имеющих значительную толщину.
Известен ЭМА преобразователь (см. Буденков Б.А., Буденков Г.А. и др. Бесконтактный ввод и прием ультразвука. - Дефектоскопия, 1969, №1, с.121-123.), предназначенный для ультразвукового контроля металлических изделий произвольной толщины. ЭМА преобразователь состоит из узла подмагничивания и излучателя. Узел подмагничивания представляет собой П-образный магнит, полюса которого расположены на поверхности контролируемого металлического изделия. Излучатель представляет собой решетку, состоящую из нескольких расположенных в одной плоскости параллельно друг другу проводников (нитей-излучателей). Решетка расположена между полюсами магнита, параллельно поверхности контролируемого изделия. Для формирования звуковой волны системой синфазных излучателей расстояние между излучателями выбирают равному l=λ; при возбуждении систем противофазных излучателей l=λ/2, где λ=сс/f - длина нормальной ультразвуковой волны в соответствующей рабочей точке; сc - фазовая скорость ультразвуковой волны; f - рабочая частота ультразвукового излучения.
ЭМА преобразователь имеет постоянный магнит, что не позволяет оперативно изменять значение магнитной индукции внешнего поля на поверхности контролируемого изделия. Вместе с тем известно (см. Эйчина В.Г., Кеслер Н.А. Влияние магнитного поля на затухание ультразвуковых колебаний. - Дефектоскопия, 1972, № 3, с.53-58; Малинка А.В., Драпкин И.А., Коломоец Н.Т. Электромагнитно-акустический метод контроля ферромагнитных листов и труб. - Дефектоскопия, 1972, № 4, с.44-48.), что максимальный эффект при контроле изделий из различных материалов достигается при различном значении магнитной индукции внешнего поля.
Известен ЭМА преобразователь (см. патент Японии 2004-177267, G01N 29/04), являющийся прототипом заявляемого изобретения. ЭМА преобразователь состоит из П-образного узла подмагничивания и излучателя. Излучатель представляет собой решетку, состоящую из нескольких расположенных в одной плоскости параллельно друг другу проводников (нитей-излучателей). Решетка расположена между полюсами узла подмагничивания, параллельно поверхности контролируемого изделия. Узел подмагничивания включает в себя постоянный магнит, расположенный между верхними торцами магнитоводов. Нижние торцы магнитоводов являются полюсами узла подмагничивания. Постоянный магнит представляет собой прямоугольный брусок с закругленными краями. Магнит установлен с возможностью вращения вокруг своей поперечной оси симметрии, расположенной параллельно нитям-излучателям. Конструкция датчика позволяет изменять значение магнитной индукции внешнего поля на поверхности контролируемого изделия в широких пределах. Вместе с тем, при проведении измерений в условиях значительных внешних полей направление результирующего вектора магнитной индукции поля на поверхности контролируемого объекта может не совпадать с направлением вектора магнитной индукции поля, формируемого узлом подмагничивания. Конструкция узла подмагничивания прототипа не позволяет изменять значение магнитной индукции продольного поля. Наличие некомпенсированной продольной составляющей поля может привести к непостоянству результатов измерения одного и того же объекта, находящегося в различных условиях воздействия внешних магнитных полей.
В основу изобретения положена задача повышения качества измерений за счет предварительной компенсации поперечной составляющей внешнего магнитного поля. Для этого в конструкцию ЭМА преобразователя введен дополнительный П-образный узел подмагничивания, полюса которого расположены с двух сторон излучателя, перпендикулярно нитям. Это позволит добиться постоянства магнитной картинки на поверхности контролируемо объекта, что, в свою очередь, приведет к постоянству результатов измерения при контроле в условиях внешних магнитных полей.
Задача, положенная в основу изобретения, решается за счет того, что в ЭМА преобразователе, состоящем из узла подмагничивания и расположенного между его полюсами излучателя, представляющего собой решетку из нескольких расположенных в одной плоскости параллельных друг другу и полюсам узла подмагничивания проводников, причем узел подмагничивания представляет собой подвижный постоянный магнит в форме прямоугольника с закругленными краями, расположенный между верхними торцами параллельных друг другу магнитоводов, нижние торцы которых образуют полюса узла подмагничивания, в соответствии с изобретением в преобразователь введены два дополнительных магнитовода, нижние торцы которых расположены с двух сторон излучателя, в плоскости полюсов магнитопроводов узла подмагничивания, перпендикулярно проводникам решетки, при этом верхние торцы всех магнитоводов направлены к центру магнита, а магнит установлен с возможностью вращения вокруг своей точки симметрии. Для удобства эксплуатации магнит может быть запрессован в диамагнитное вещество в форме шара, который расположен между имеющими сферические вырезы торцами магнитоводов, при этом плоскости симметрии магнита и шара совпадают.
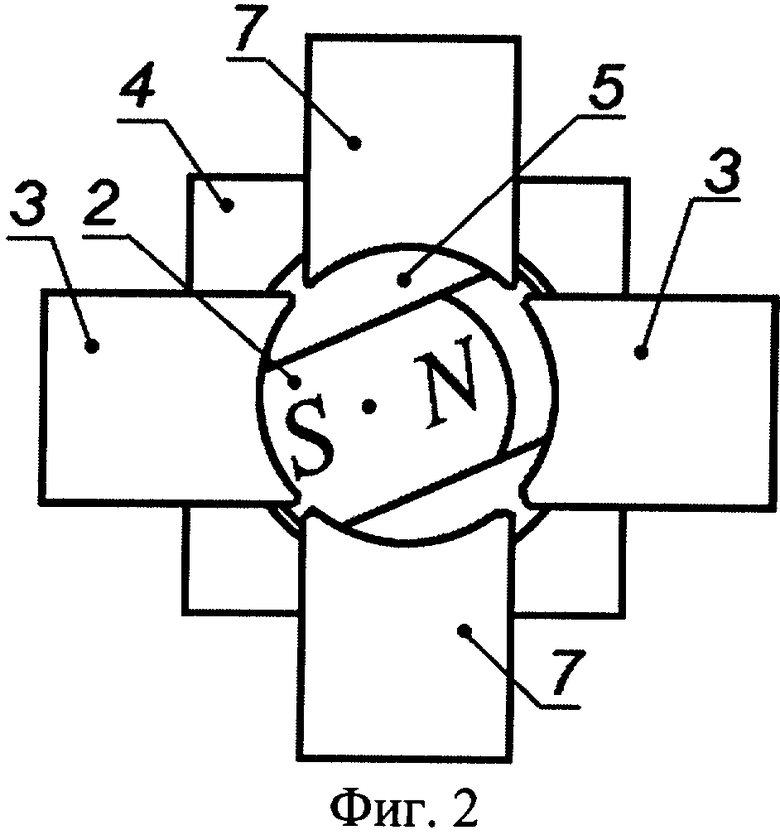
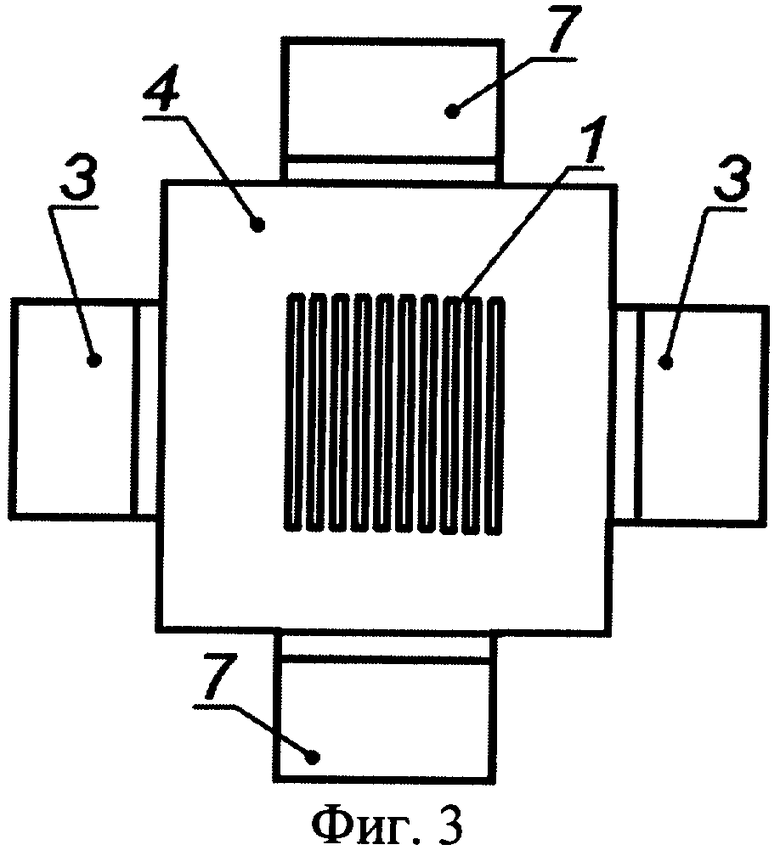
Конструкция предлагаемого ЭМА преобразователя поясняется чертежами приведенными на фиг.1-3. На фиг.1 показан эскиз поперечного разреза ЭМА преобразователя, на фиг.2 - вид сверху, на фиг.3 - вида снизу. Где 1 - излучатель, 2 - магнит, 3 - магнитоводы, 4 - брусок из диэлектрического материала, 5 - шар, 6 - рука, 7 - поверхность контролируемого объекта, 8 - дополнительные магнитоводы.
Суть изобретения заключается в следующем.
ЭМА преобразователь состоит из узла подмагничивания и излучателя. Излучатель представляет собой решетку, состоящую из нескольких расположенных в одной плоскости параллельно друг другу проводников (нитей-излучателей). Решетка расположена между полюсами узла подмагничивания, в непосредственной близости от поверхности контролируемого изделия, параллельно ей. Нити-излучатели должны располагаться друг от друга на расстоянии l, пропорциональном λ - длине нормальной акустической волны, возбуждаемой ЭМА преобразователем. То есть l=λ/n, где n=1, 2,...k - целое число. В большинстве случаев практического применения преобразователей n=1 или n=2 (см. Глухов Н.А., Бобров В.Т., Веременко С.В., Дружаев Ю.А., Колмогоров В.Н., Лебедева Н.А. Электромагнитно-акустические преобразователи для упругих волноводов. - Дефектоскопия, 1972, № 4, с.38-45.). При контроле изделий из ферромагнитных материалов n=6 (см. Буденков Г.А., Гуревич С.Ю. Современное состояние бесконтактных методов и средств ультразвукового контроля: Акустические методы. - Дефектоскопия, 1981, № 5, стр.6-22).
Узел подмагничивания состоит из четырех магнитоводов, установленных перпендикулярно поверхности контролируемого изделия, вокруг излучателя. При этом полюса двух магнитопроводов расположены параллельно нитям, а двух других (дополнительных) - перпендикулярно нитям решетки. Верхние торцы магнитоводов направлены к центру магнита. Магнит, расположенный между верхними торцами магнитоводов, выполнен в виде параллелепипеда с закругленными краями. При этом обеспечена возможность вращения магнита вокруг своей точки симметрии.
Для удобства практической эксплуатации магнит помещен внутрь шара из диамагнитного материала, например, способом запрессовки.
Магнитоводы, излучатель и шар магнита зафиксированы друг относительно друга с помощью прямоугольного бруска, изготовленного из диэлектрического материала. При этом излучатель прикреплен к нижней стороне бруска, к боковым сторонам которого прикреплены внутренние стороны магнитоводов. На верхней стороне диэлектрического бруска сделана сферическая выемка.
Для удобства шар может быть снабжен ручкой, а на поверхности шара нанесена координатная сетка.
Работа предлагаемого ЭМА преобразователя заключается в следующем. Для проведения неразрушающего контроля ЭМА преобразователь устанавливают на поверхность контролируемого изделия. При этом излучатель располагают в непосредственной близи от поверхности. С помощью узла подмагничивания в верхнем слое объекта контроля создается постоянное магнитное поле. Требуемые характеристики магнитного поля получают, вращая магнит относительно точки его симметрии. При вращении магнита будет изменяться значение магнитной индукции внешнего поля на поверхности контролируемого изделия. В определенном положении магнита будет обеспечена максимальная компенсация продольной составляющей внешнего магнитного поля при заданном значении магнитной индукции поперечной составляющей. После этого на нити излучателя подается электрический сигнал, в результате чего в поверхностном слое объекта контроля индуцируются вихревые токи. Взаимодействие первичного и наведенного токов приводит к появлению давлений, изменяющихся с ультразвуковой частотой. Ультразвуковые колебания, в свою очередь, создают в металле пространственно-периодическое поле, под влиянием которого частицы среды совершают колебания. При пересечении колеблющимися частицами силовых линий магнитного поля, в поверхностном слое металла возникают вихревые токи, которые регистрируются с помощью приемной части системы неразрушающего контроля.
Использование предлагаемого ЭМА преобразователя позволит подобрать оптимальные характеристики магнитного поля на поверхности контролируемого изделия без использования вращающихся магнитов и электромагнитов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ КОНТРОЛЯ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2015 |
|
RU2584274C1 |
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| СПОСОБ ФОРМИРОВАНИЯ АКУСТИЧЕСКОЙ ВОЛНЫ | 2007 |
|
RU2339030C1 |
| Устройство электромагнитно-акустического контроля рельсов | 2017 |
|
RU2653663C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2206888C1 |
| СПОСОБ АКУСТИЧЕСКОГО КОНТРОЛЯ ИЗДЕЛИЙ | 1990 |
|
SU1745044A1 |
| Электромагнитно-акустический преобразователь | 1989 |
|
SU1684656A1 |
| МАГНИТНАЯ СИСТЕМА ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2007 |
|
RU2350943C1 |
Использование: для неразрушающего контроля металлических изделий ультразвуковым методом. Сущность: заключается в том, что ЭМА преобразователь состоит из узла подмагничивания и расположенного между его полюсами излучателя, представляющего собой решетку из нескольких расположенных в одной плоскости параллельных друг другу и полюсам узла подмагничивания проводников, причем узел подмагничивания представляет собой подвижный постоянный магнит в форме параллелепипеда с закругленными краями, расположенный между верхними торцами параллельных друг другу магнитоводов, нижние торцы которых образуют полюса узла подмагничивания, кроме того, в преобразователь введены два дополнительных магнитовода, нижние торцы которых расположены с двух сторон излучателя, в плоскости полюсов магнитопроводов узла подмагничивания, перпендикулярно проводникам решетки, при этом верхние торцы всех магнитоводов направлены к центру магнита, а магнит установлен с возможностью вращения вокруг своей точки симметрии. Технический результат: повышение качества измерений за счет предварительной компенсации поперечной составляющей внешнего магнитного поля. 4 з.п. ф-лы. 3 ил.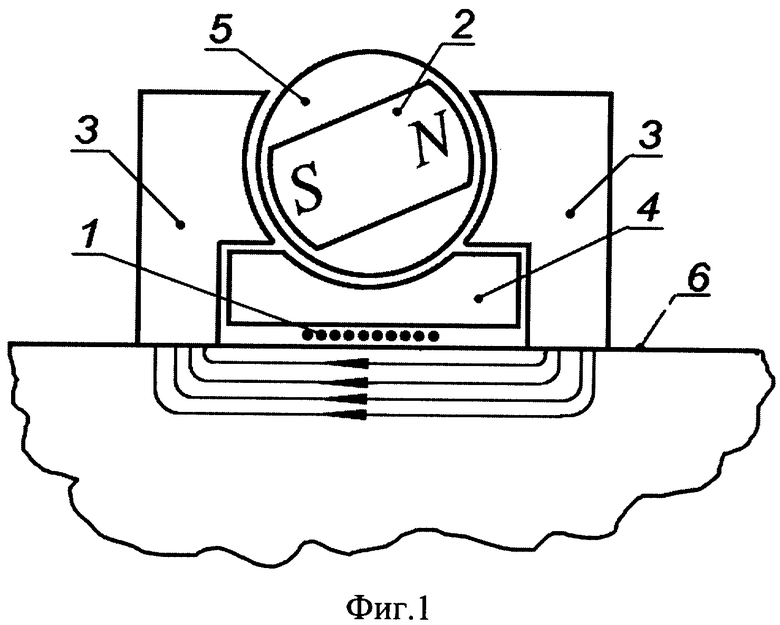
| JP 2004177267 А, 24.06.2004 | |||
| Электромагнитно-акустический преобразователь | 1983 |
|
SU1118913A1 |
| Приемно-излучающая система для резонансного электромагнитно-акустического контроля | 1987 |
|
SU1538118A1 |
| Электромагнитно-акустический преобразователь | 1985 |
|
SU1280513A1 |
| WO 2004058420 A1, 15.07.2004 | |||
| JP 2005214686 A, 11.08.2005 | |||
| Устройство для оплетки индукторов двойной изоляцией | 1980 |
|
SU1068655A1 |

