113
Изобретение относится к машино- строению, в частности к захватным устройствам манипуляторов и промышленных роботов, применяемых для обслуживания металлообрабатывающих станков с программным управлениемо
Целью изобретения является повышение надежности работы путем обеспе чения зажима и разжима деталей от одного привода.
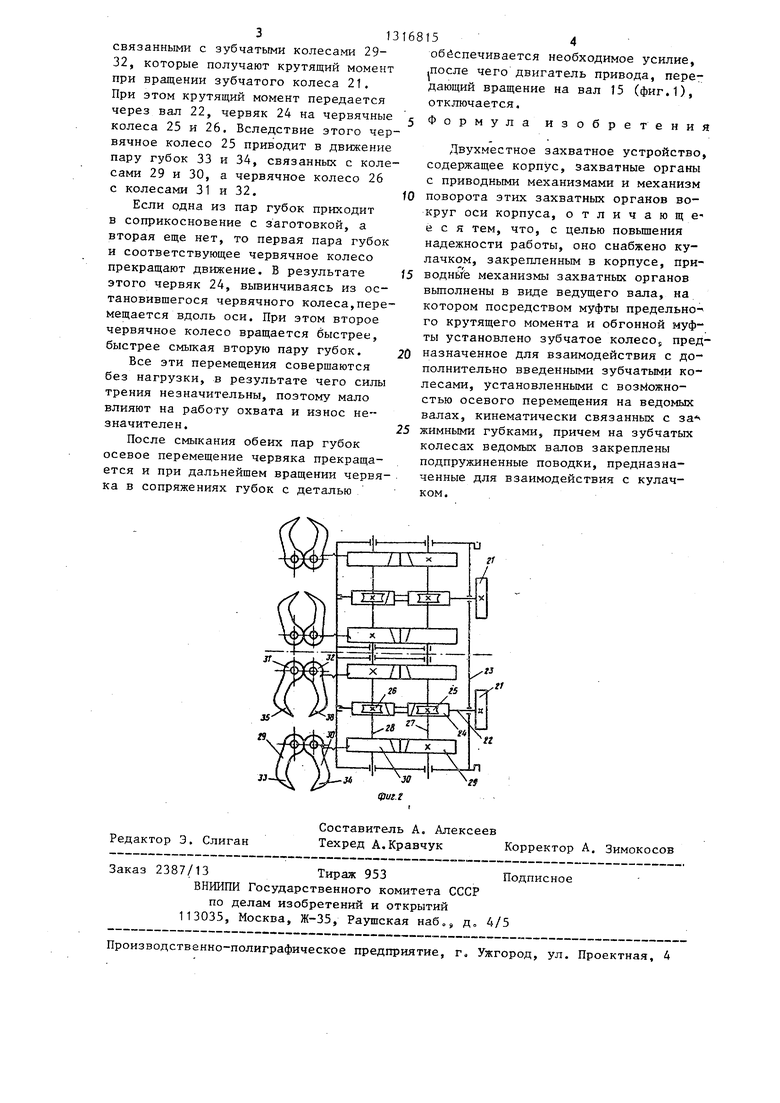
На фиг. 1 изображена схема двухместного захватного устройства; на фиг. 2 - схема захватного органа..
Двухместный поворотный схват состоит из неподвижного корпуса 1, в котором на подпшпниках 2 размещается поворотная часть 3, имеющая байонет- ный разъем 4 для присоединения двухместного захватного органа. Б поворотной части расположено распределительное устройство, состоящее из ведущего вала 5 с зубчатым колесом 6, На выходньк концах ведог-яых валов 7 расположены зубчатые колеса 8 и подвижные ведомые зубчатые колеса 9, которые охвачены вилками поводков 10, односторонне поджимаемые пружинами 11. Поводки оснащены выходными концами с роликами 12, выступающими из поворотной части через продольные прорези 13. Ролики 12 находятся в контакте с торцовым кулачком 14, жестко связанным с корпусом. Ведущий вал распределительного устройства получает движение от вала 15 через коническую пару 16 в том случае, если привод охвата осуществляется без контроля нагрузки. Для обеспечения возможности разжима схвата предусмотрены муфты 17 предельного момента и обгонная муфта 18. Поворот захватных органов осуществляется от вала 19 через беззазорную червячную пару 20. Ведущее зубчатое колесо 21 приводного механизма захватного органа закреплено на валу 22, расположенном в корпусе 23. Ведущие забучатые колеса 21 предназначены для зацепления с выходными зубчатыми колесами 8 поворотной головки и передачи крутящего момента через вал 22 на червяк 24, червяк 24 закреплен на валу 22 с возможностью осевого перемещения и представляет собой сдвоенный червяк, одна половина которого имеет правую нарезку, а другая - левую. Прочие параметры червяков идентичны. В сопряжении с половинками червяка находятся червячные секторы 25 и
52
26, являющиеся частями червячных колес. Указанные червячные секторы жестко закреплены на валах 27 и 28, на концах которых расположены зубчатые ко- леса 29-32 с винтовьп 1И зубьями, которые жестко связаны с губками схвата соответственно 33-36. Колеса 29 и 32 жестко связаны с соответствующими валами, а колеса 31 и 30 - с возмож- костью свободного вращения относительно вала. Зубчатые колеса 29-32 выполнены косозубыми для регулирования положения оси захватываемой детали путем осевого смещения зубча- тых колес друг относительно друга.
Двухместное захватное устройство работает, следующим образом.
При вращении вала 19 поворотная часть с дву сместным захватным орга- ном получает вращение через-червячную пару 20. При этом кулачок 14 вращается совместно с корпусом и воздействует на поводки 10, связанные с колесами 9. Подвижное колесо 9 вы- ходит из зацепления с колесом 6 по мере перемещения комплекта губок из ,зоны срабатывания в зону, где их срабатывание не требуется, и губки 33- 36 оказываются отключенными от ва- ла 5. Если губки в это время удерживают деталь, то их состояние не меняется вследствие наличия в устройстве самотормозящего элемента - червячной пары. Включение природа осущест- вляется прулсиной 1 1, прижимающей ролик 12 поводка до контакта с пониженным участком кулачка 14, тем самым исключая аварийную ситуацию при совпадении торцов сопряженных зубчатых колес 9 и 6, что было бы неизбежно при вводе в зацепление непосредственно кулачком при кинематическом замыкании. При зажиме заготовки крутящий момент через зубчатую пару 16 от ва- ла 15 передается через муфту предельного момента 17 при незаклиненной обгонной муфте 18, При разжиме заготовки крутящий момент передается параллельно через обе муфты, обеспечиваю- Щие в этом случае приложение большего по величине момента, необходимого для страгивания самотормозящих пар 25 и 24. Если не привод обеспечивает вращение с контролируемым момен- том, то муфты 17 и 18 могут быть исключены из конструкции.
Деталь, например ступенчатая, захватывается губками 33-36, жестко
313
связанными с зубчатыми колесами 29- 32, которые получают крутящий момент при вращении зубчатого колеса 21, При этом крутящий момент передается через вал 22, червяк 24 на червячные колеса 25 и 26, Вследствие этого червячное колесо 25 приводит в движение пару губок 33 и 34, связанных с колесами 29 и 30, а червячное колесо 26 с колесами 31 и 32.
Если одна из пар губок приходит в соприкосновение с заготовкой, а вторая еще нет, то первая пара губок и соответствующее червячное колесо прекращают движение. В результате этого червяк 24, вывинчиваясь из остановившегося червячного колеса,перемещается вдоль оси. При этом второе червячное колесо вращается быстрее, быстрее смыкая вторую пару губок.
Все эти перемещения совершаются без нагрузки, в результате чего силы трения незначительны, поэтому мало влияют на работу охвата и износ незначителен.
После смыкания обеих пар губок осевое перемещение червяка прекращается и при дальнейшем вращении червяка в сопряжениях губок с деталью
154
обеспечивается необходимое усилие, .после чего двигатель привода, передающий вращение на вал 15 (фиг.1), отключается, Формула изобретения
Двухместное захватное устройство, содержащее корпус, захватные органы с приводными механизмами и механизм
поворота этих захватных органов вокруг оси корпуса, отличающее е с я тем, что, с целью повьш1ения надежности работы, оно снабжено кулачком, закрепленньм в корпусе, приводньге механизмы захватных органов вьтолнены в виде ведущего вала, на котором посредством муфты предельно- го крутящего момента и обгонной муфты установлено зубчатое колесоs предназначенное для взаимодействия с дополнительно введенными зубчатыми колесами, установленными с возможностью осевого перемещения на ведомых валах, кинематически связанных с за
жимными губками, причем на зубчатых колесах ведомых валов закреплены подпружиненные поводки, предназначенные для взаимодействия с кулачком.
33
If
Редактор Э, Слиган
Составитель А, Алексеев
Техред А.Кравчук Корректор А, Зимокосов
Заказ 2387/13Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб„, д, 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4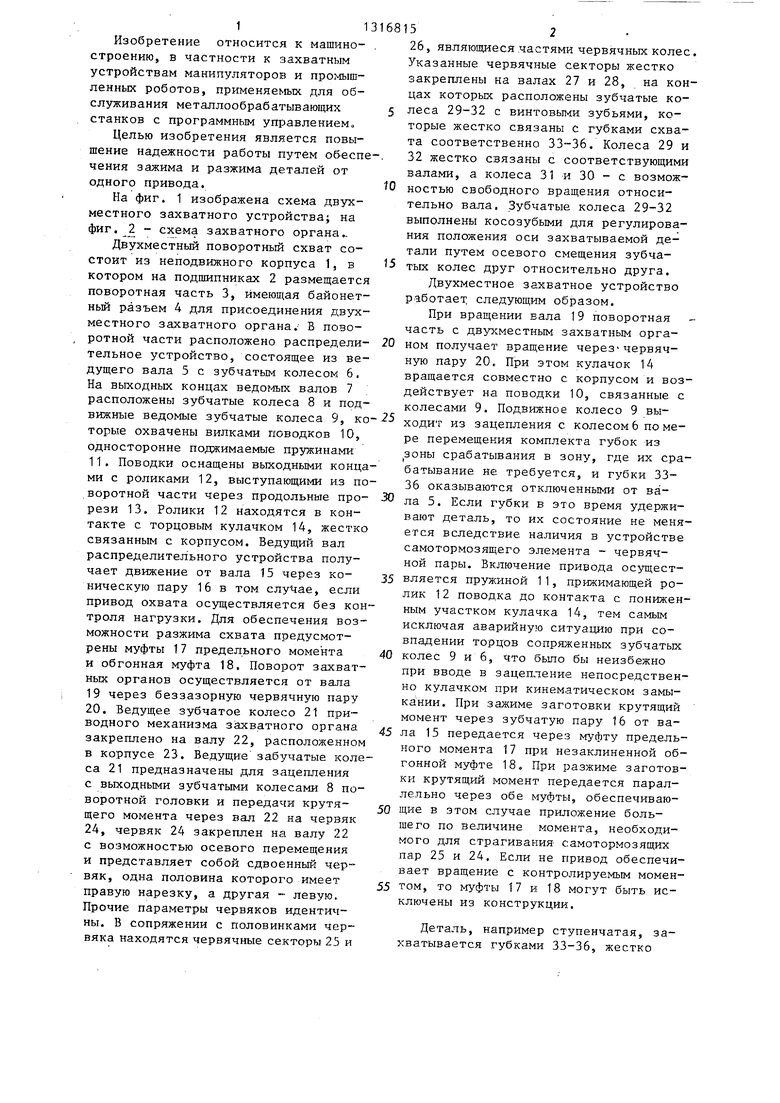
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Многошпиндельный токарный авто-MAT | 1979 |
|
SU852448A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1984 |
|
SU1166907A1 |
| Захватное устройство манипулятора | 2018 |
|
RU2700348C1 |
| Захватное устройство | 1985 |
|
SU1268406A1 |
| Очувствленный схват манипулятора | 1979 |
|
SU804427A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
Изобретение относится к мапшно- строению, в частности к захватным устройствам манипуляторов, применяемых для обслуживания металлорежущих станков с программным управлением. Г), V qxff.f Целью изобретения является повышение надежности работы путем обеспечения зажима и разжима деталей от одного привода. При вращении вала 19 поворотная часть получает вращение через червячную пару 20. При этом кулачок 14 воздействует на поводки 10, связанные с колесами 9, которые выходят из зацепления с колесом 6 по мере перемещения комплекта губок из зоны срабатьгеания в зону, где их срабатывание не требуется и губки оказываются отключенньми от вала 5, Включение привода осуществляется пружиной 11, прижимающей ролик 12 поводка до контакта с пониженным участком кулачка 14. 2 ил. с (Л со о 00 ел
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
