Предлагаемая система относится к космической технике и может быть использована на космических аппаратах, находящихся на орбите искусственного спутника Земли, кроме геостационарной, стабилизируемых вращением вдоль вертикальной оси, и на наземных приемных пунктах.
Известны способы и системы определения координат аварийного объекта (патенты РФ №№2.155.352, 2.158.003, 2.040.860, 2.059.423, 2.174.092, 2.193.990, 2.201.601, 2.206.902, 2.226.479, 2.240.950; патенты США №№4.161.730, 4.646.090, 4.947.177; Скубко Р.А. и др. Спутник у штурвала. - Л.: Судостроение, 1989, с.168 и другие).
Из известных способов и систем наиболее близкой к предлагаемой является система, реализующая «Угломестно-временной доплеровский способ определения координат аварийного объекта» (патент РФ №2.174.092, В64G 1/10, 1999), которая и выбрана в качестве прототипа.
Согласно известной системе производят поиск такого пространственного положения приемной антенны спутника при наличии факта работы передатчика аварийного объекта, когда частота Доплера принимаемого сигнала равна нулю. В этот момент измеряют угол между осью приемной антенны и осью датчика горизонта. Координаты подспутниковой точки трассы космического аппарата в момент измерения вычисляются. Измерения проводят два раза. По координатам двух подспутниковых точек и двум измерениям указанного угла определяют местоположение аварийного объекта.
Известная система обеспечивает однозначное определение и повышение точности вычисления координат аварийного объекта, находящегося на поверхности Земли, а также расширение площади просматриваемой поверхности и увеличение отношения сигнал/шум в приемной радиолинии.
Однако известная система не полностью реализует свои потенциальные возможности. Она может использоваться и для уточнения элементов орбиты космического аппарата при его прохождении над наземным приемным пунктом.
Технической задачей изобретения является расширение функциональных возможностей системы путем уточнения элементов орбиты космического аппарата при его прохождении над наземным приемным пунктом.
Поставленная задача решается тем, что угломестно-временная доплеровская система для определения координат аварийного объекта, содержащая, в соответствии с ближайшим аналогом, передатчик аварийного объекта, бортовую аппаратуру космического аппарата и наземную аппаратуру приемного пункта, при этом ось вращения космического аппарата отклонена от местной вертикали, космический аппарат состоит из корпуса, импульсного инфракрасного датчика горизонта, размещенного на одной оси противоположно приемной антенне, механическая ось которой не совпадает с осью вращения космического аппарата, бортовая аппаратура космического аппарата состоит из последовательно включенных приемной антенны, приемника, второй вход которого соединен с первым выходом задающего генератора, измерителя частоты Доплера, второй вход которого соединен с вторым выходом задающего генератора, устройства сравнения, блокинг-генератора, первой схемы совпадения, второй вход которой соединен с вторым выходом приемника, второй схемы совпадения, второй вход которой соединен с вторым выходом блокинг-генератора, первого вентиля, второй вход которого через счетчик импульсов соединен с выходом генератора импульсов и датчика горизонта, схемы коммутации и магнитного запоминающего устройства, к второму выходу схемы коммутации последовательно подключены передатчик и передающая антенна, к третьему выходу задающего генератора последовательно подключены временное устройство и второй вентиль, второй вход которого соединен с вторым выходом второй схемы совпадения, а выход подключен к второму входу схемы коммутации, отличается от ближайшего аналога тем, что бортовой передатчик выполнен в виде последовательно подключенных к второму выходу схемы коммутации генератора высокой частоты, фазового манипулятора, второй вход которого через формирователь модулирующего кода соединен с выходом магнитного запоминающего устройства, и усилителя мощности, подключенного к передающей антенне, наземная аппаратура приемного пункта выполнена в виде последовательно включенных приемной антенны, усилителя высокой частоты, первого смесителя, второй вход которого соединен с первым выходом блока эталонных частот, усилителя промежуточной, удвоителя фазы, первого узкополосного фильтра, делителя фазы на два, второго узкополосного фильтра, фазового детектора, второй вход которого соединен с выходом усилителя промежуточной частоты, вычислительного блока и блока регистрации, причем к выходу второго узкополосного фильтра последовательно подключены второй смеситель, второй вход которого соединен с вторым выходом блока эталонных частот, третий узкополосный фильтр и измеритель частоты Доплера, выход которого соединен с вторым входом вычислительного блока.
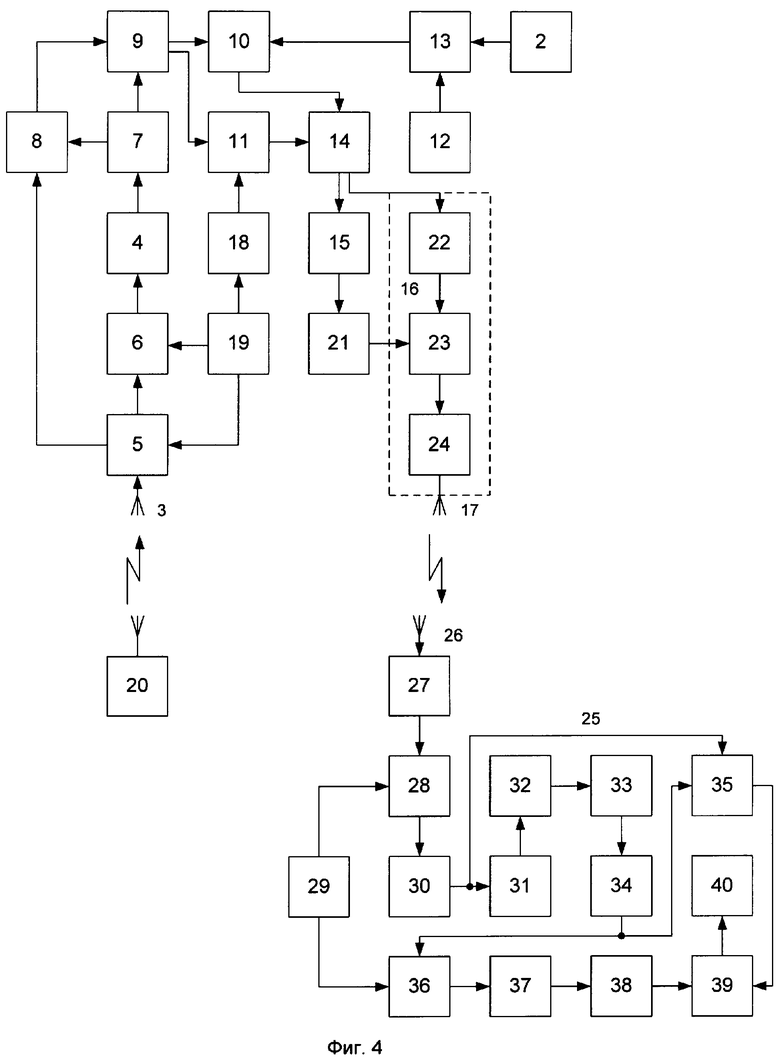
Геометрическая схема расположения космического аппарата 1, импульсного инфракрасного датчика 2 горизонта и приемной антенны 3, размещенной на одной оси противоположно датчику 2 горизонта, показана на фиг.1. Принцип определения доплеровского сдвига частоты передатчика КА иллюстрируется на фиг.2. Зависимость доплеровской частоты от времени изображена на фиг.3. Структурная схема системы представлена на фиг.4. Временные диаграммы, поясняющие работу системы, изображены на фиг.5.
Система содержит передатчик 20 аварийного объекта (аварийного радиобуя АРБ), бортовую аппаратуру космического аппарата и наземную аппаратуру приемного пункта.
Бортовая аппаратура КА содержит последовательно включенные приемную антенну 3, приемник 5, второй вход которого соединен с первым выходом задающего генератора 19, измеритель 6 частоты Доплера, устройство 4 сравнения, заторможенный блокинг-генератор 7, первую схему совпадения И 8, второй вход которой соединен с вторым выходом приемника 5, вторую схему совпадения И 9, второй вход которой соединен с вторым выходом блокинг-генератора 7, первый вентиль 10, второй вход которого через счетчик 13 импульсов соединен с выходами датчика 2 горизонта и генератора 12 импульсов, схему коммутации 14, магнитное запоминающее устройство 15, формирователь 21 модулирующего кода, фазовый манипулятор 23, второй вход которого через генератор 22 высокой частоты соединен с вторым выходом схемы 14 коммутации, усилитель 24 мощности и передающую антенну 17. Генератор 22 высокой частоты, фазовый манипулятор 23 и усилитель 24 мощности образуют передатчик 16.
К третьему выходу задающего генератора 19 последовательно подключены временное устройство 18 и второй вентиль 11, второй вход которого соединен с вторым выходом второй схемы совпадения 9, а выход подключен к второму входу схемы 14 коммуникации.
Наземная аппаратура приемного пункта 25 содержит последовательно включенные приемную антенну 26, усилитель 27 высокой частоты, первый смеситель 28, второй вход которого соединен с первым выходом блока 29 эталонных частот, усилитель 30 промежуточной частоты, удвоитель 31 фазы, первый узкополосный фильтр 32, делитель 33 фазы на два, второй узкополосный фильтр 34, фазовый детектор 35, второй вход которого соединен с выходом усилителя 30 промежуточной частоты, вычислительный блок 39 и блок 40 регистрации. К выходу второго узкополосного фильтра 34 последовательно подключены второй смеситель 36, второй вход которого соединен с вторым выходом блока 29 эталонных частот, третий узкополосный фильтр 37 и измеритель 38 частоты Доплера, выход которого подключен к второму входу вычислительного блока 39.
Принцип работы предлагаемой системы состоит в поиске такого пространственного положения приемной антенны 3 КА, стабилизируемого вращением вдоль вертикальной оси, при наличии факта работы передатчика 20 аварийного объекта, когда частота Доплера принимаемого сигнала равна нулю, измерение в этот момент времени угла между механической осью приемной антенны 3 КА и осью горизонта с привязкой измерения к бортовому временному устройству 18. Измерения записываются в магнитное запоминающее устройство 15 и передаются по радиолинии на наземный приемный пункт 25. Координата подспутниковой точки в момент измерений вычисляется. Измерения проводятся не менее двух раз. По координатам двух подспутниковых точек и двум измеренным углам между механической осью приемной антенны 3 КА и осью горизонта определяется местоположение аварийного объекта.
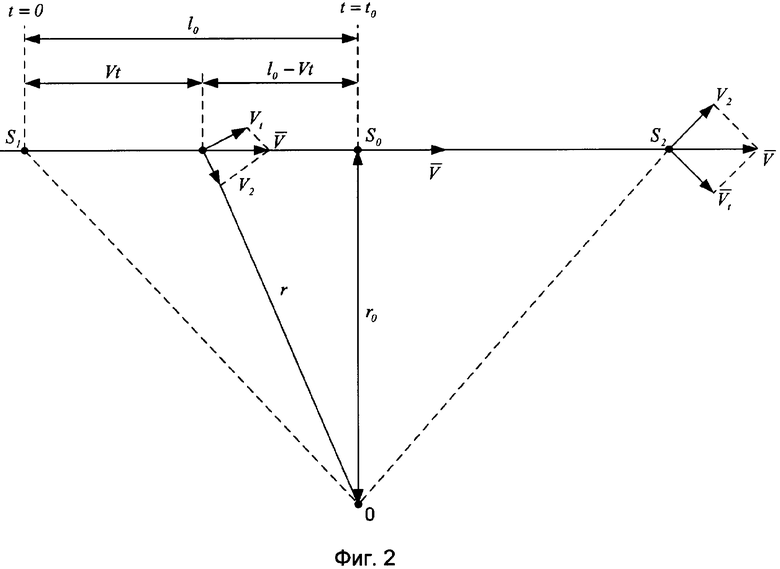
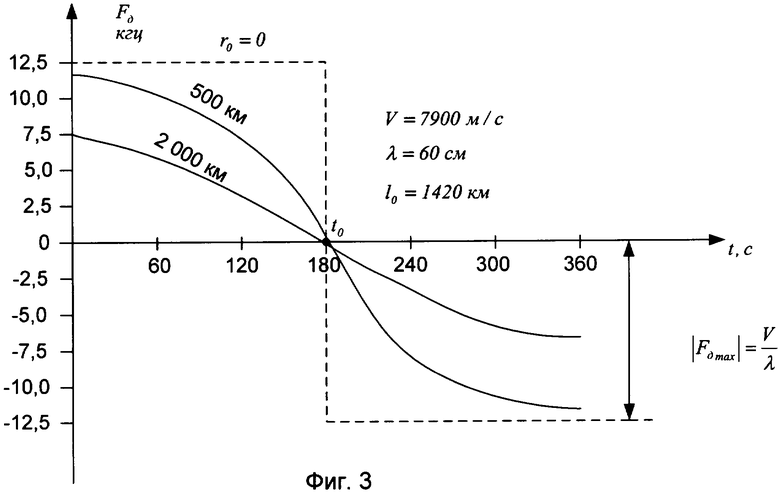
Принцип определения параметров орбиты КА с помощью доплеровской беззапросной системы, при которой на борту КА расположен передатчик, а на Земле - измерительное устройство, иллюстрируется фиг.2 и 3.
Доплеровская частота определяется на основании соотношения
где λ - рабочая длина волны,
r - текущее расстояние от КА до наземного приемного пункта (0).
Вектор движения КА  может быть направлен под любым углом к линии радиосвязи. Связь радиальной составляющей Vr с модулем V находится при задании конкретного закона движения КА, определяющего вид функции r=r(t).
может быть направлен под любым углом к линии радиосвязи. Связь радиальной составляющей Vr с модулем V находится при задании конкретного закона движения КА, определяющего вид функции r=r(t).
Пусть наблюдаемая траектория движения КА S1-S2 не проходит через наземный приемный пункт О, относительно которого ведется отсчет расстояний. Кратчайшее расстояние между приемником и передатчиком при нахождении последнего в точке S0 составляет r0 (фиг.2). Это так называемая точка траверза. Время отсчитывается от момента t=0, соответствующего прохождению КА через точку S1. Расстояние между S1 и S0 обозначим через l0, момент прохождения точки S0 - через t0.
Зависимость доплеровской частоты от времени имеет следующий вид:
где знак «плюс» соответствует условию 0≤t≤t0 (сближение), а знак «минус» - условию t0<t≤∞ (удаление).
Указанное выражение показывает, что доплеровская частота зависит как от V и λ, так и от t, r0 и l0. Причем зависимость от времени нелинейная (фиг.3).
На линейном участке вблизи точки перегиба
и тогда
Дифференцируя это выражение по времени, можно найти выражение для производной от доплеровской частоты:
Видно, что значение  не зависит от начала наблюдений (l0).
не зависит от начала наблюдений (l0).
Из последнего выражения следует, что, зная скорость V и длину волны λ, а также измерив производную  , можно найти кратчайшее расстояние
, можно найти кратчайшее расстояние
По величинам V и r0 рассчитывают элементы орбиты КА.
Особенностью беззапросного метода измерения радиальной скорости является необходимость использования эталонов частоты. При условии, что погрешность измерения радиальной скорости не должна превышать десятой доли метра в секунду, допустимая относительная нестабильность эталонов частоты в течение всего времени функционирования системы не должна превышать 10-10. Столь высоким требованиям к стабильности частоты удовлетворяют квантовые эталоны частоты.
В приемнике беззапросной системы измерения радиальной скорости осуществляется двухкратное преобразование частоты. Оно необходимо потому, что относительное значение доплеровского сдвига  , равное отношению скорости
, равное отношению скорости  , не превышает 10-4. В этих условиях выделение доплеровского сдвига при однократном преобразовании частоты требует использования контуров с очень высокой, практически недостижимой добротностью.
, не превышает 10-4. В этих условиях выделение доплеровского сдвига при однократном преобразовании частоты требует использования контуров с очень высокой, практически недостижимой добротностью.
Предлагаемая система работает следующим образом.
Поступательное движение космического аппарата, ось вращения которого отклонена от местной вертикали, обеспечивает перемещение линии сканирования диаграммы направленности приемной антенны 3 и последовательный просмотр полосы на поверхности Земли вдоль орбиты космического аппарата. Частота вращения КА выбирается из условия просмотра поверхности Земли без пропуска. Для устранения неоднозначности механическая ось приемной антенны 3 КА сдвигается относительно оси вращения на угол β, равной ширине диаграммы направленности приемной антенны.
В исходном состоянии до попадания сигнала с передатчика 20 аварийного объекта в диаграмму направленности приемной антенны 3 на выходе приемника 5 сигнал отсутствует. На выходе схем совпадения И 8, 9 - нуль. Импульсный датчик 2 горизонта в момент пересечения трассы КА вырабатывает импульс, который обнуляет счетчик 13 импульсов. Вентили 10 и 11 закрыты.
При появлении сигнала с передатчика 20 аварийного объекта в просматриваемой полосе на поверхности Земли измеритель 6 начинает измерение частоты Доплера беззапросным методом. При достижении частоты Доплера значения, равного нулю, механическая ось приемной антенны 3 находится в точке траверза. В этот момент измеряется значение угла между осью датчика 2 горизонта и положения механической оси приемной антенны 3 (угла α). Измерения привязываются к бортовому временному устройству 18.
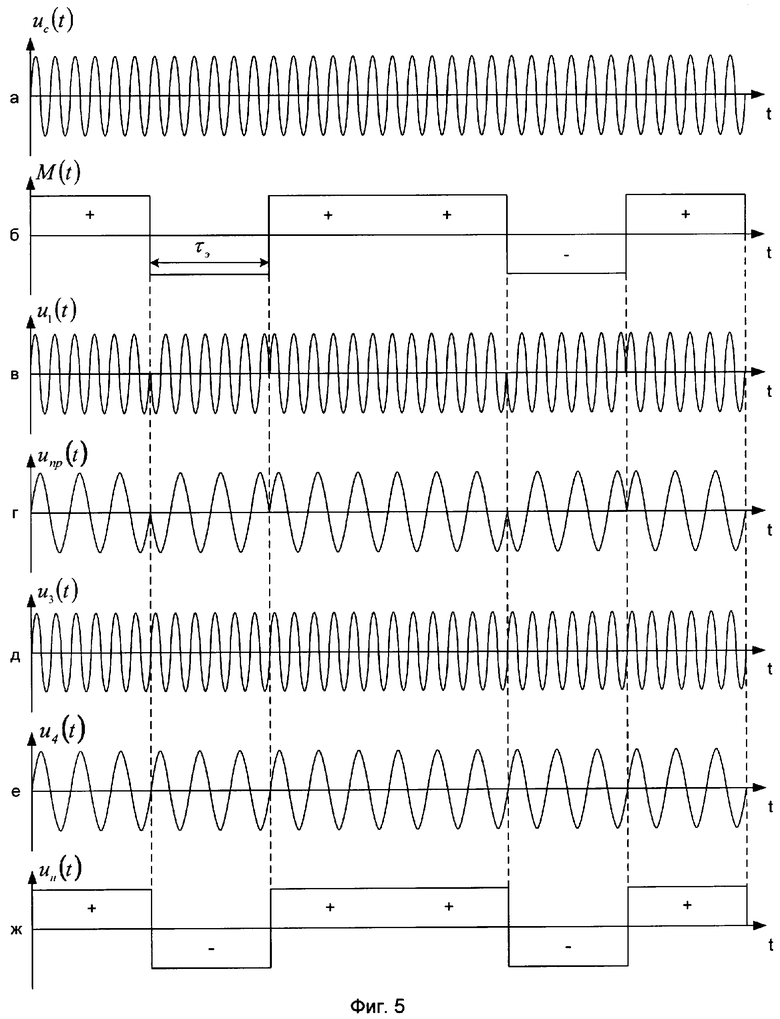
При достижении значения частоты Доплера на выходе измерителя 6, равного нулю, открывается устройство 4 сравнения и запускается заторможенный блокинг-генератор 7, на выходах схемы совпадения И 9 появляется единица. Открываются вентили 10 и 11. Информация о значении угла α (количество импульсов, записанных в счетчик 13 импульсов) и времени измерения записывается через схему коммутации 14 на магнитное запоминающее устройство 15 и поступает на вход формирователя 21 модулирующего кода, где формируется код M(t) (фиг.5, б), который поступает на первый вход фазового манипулятора 23. На второй вход последнего подается высокочастотное колебание с выхода генератора 22 высокой частоты (фиг.5, а)
uc(t)=Uccos(2πfct+ϕc), 0≤t≤Тc,
где Uc, fc, ϕc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания.
На выходе фазового манипулятора 23 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, в)
u1(t)=Uccos(2πfct+ϕk(t)+ϕc), 0≤t≤Tc,
где ϕk(t)={0, π} - манипулированная составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t) (фиг.5, б), причем ϕk(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (K=1, 2,..., N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc (Тc=Nτэ);
который после усиления в усилителе 23 мощности с помощью антенны 17 излучается в эфир. При прохождении КА над наземным приемным пунктом 25 указанный сигнал улавливается приемной антенной 26. На выходе приемника 27 в этом случае появляется сигнал
u2(t)=U2cos(2πf1t+ϕk(t)+ϕc), 0≤t≤Tc,
где f1=fc±F∂,
F∂ - доплеровское смещение частоты, обусловленное движением КА относительно наземного приемного пункта, который поступает на первый вход первого смесителя 28, на второй вход которого подается напряжение первой эталонной частоты с первого выхода блока 29 эталонных частот
uэ1(t)=Uэ1cos(2πfэ1t+ϕэ1).
На выходе смесителя 28 образуются напряжения комбинационных частот. Усилителем 30 выделяется напряжение промежуточной (разностной) частоты (фиг.5, г)
uпр(t)=Uпрcos(2πfпрt+ϕk(t)+ϕпр), 0≤t≤Тc,
где  ;
;
К1 - коэффициент передачи смесителя;
fпр=f1-fэ1=fc±F∂-fэ1 - промежуточная частота;
ϕпр=ϕc-ϕэ1,
которое поступает на информационный вход фазового детектора 35 и на вход удвоителя 31 фазы. На выходе последнего образуется гармоническое колебание (фиг.5, д)
u3(t)=U3cos(4πfпрt+2ϕпр), 0≤t≤Tc,
где 
K2 - коэффициент передачи перемножителя.
Следует отметить, что удвоитель 31 фазы представляет собой перемножитель, на два входа которого подается ФМн-сигнал промежуточной частоты uпр(t).
Так как 2ϕk(t)={0,2π}, то в указанном колебании манипуляция фазы уже отсутствует. Ширина спектра Δf2 второй гармоники определяется длительностью Tc сигнала  , тогда как ширина спектра Δfc ФМн-сигнала определяется длительностью τэ его элементарных посылок
, тогда как ширина спектра Δfc ФМн-сигнала определяется длительностью τэ его элементарных посылок  , т.е. ширина спектра Δf2 второй гармоники сигнала в N раз меньше ширины спектра Δfc входного сигнала
, т.е. ширина спектра Δf2 второй гармоники сигнала в N раз меньше ширины спектра Δfc входного сигнала  .
.
Следовательно, при удвоении фазы ФМн-сигнала его спектр «сворачивается» в N раз.
Гармоническое колебание u3(t) выделяется узкополосным фильтром 32 и поступает на вход делителя 33 фазы на два, на выходе которого образуется гармоническое колебание (фиг.5, е)
u4(t)=U4cos(2πfпрt+ϕпр), 0≤t≤Tc,
которое выделяется узкополосным фильтром 34 и подается на опорный вход фазового детектора 35.
Следовательно, опорное напряжение, необходимое для синхронного детектирования ФМн-сигналов и работы фазового детектора, выделяется непосредственно из самого принимаемого ФМн-сигнала.
На выходе фазового детектора 35 образуется низкочастотное напряжение (фиг.5, ж)
uн(t)=Uнcosϕк(t),
где  ,
,
К3 - коэффициент передачи фазового детектора,
пропорциональное модулирующему коду M(t) (фиг.5, б), которое поступает на первый вход вычислительного блока 39. В вычислительном блоке 39 по координатам двух подспутниковых точек и двум измеренным углам α1 и α2 между механической осью приемной антенны космического аппарата и осью горизонта определяется местоположение аварийного объекта.
Одновременно гармоническое колебание u4(t) (фиг.5, е) с выхода узкополосного фильтра поступает на первый вход второго смесителя 36, на второй вход которого подается напряжение второй эталонной частоты
uэ2(t)=Uэ2cos(2πfэ2t+ϕэ2),
где fэ2=fc-fэ1-F0,
F0 - частота подставки, которая вводится для определения знака доплеровского смещения F∂.
На выходе второго смесителя 36 формируется колебание
up(t)=Upcos(2πFpt+ϕр),
где  ;
;
ϕp=ϕпр-ϕэ2;
Fp=±F∂+F0,
которое выделяется узкополосным фильтром 37 и подается на вход измерителя 38 частоты Доплера.
В зависимости от того, Fp>F0 или Fp<F0, определяют знак доплеровского смещения, а следовательно, и направление радиальной скорости.
Зная скорость V и длину волны λ, а также измерив производную  , в вычислительном блоке 39, определяют элементы орбиты КА.
, в вычислительном блоке 39, определяют элементы орбиты КА.
Система позволяет однозначно определить координаты, сократить время поиска аварийного объекта, увеличить площадь просматриваемой поверхности Земли за счет сканирования приемной диаграммы направленности, увеличить соотношение сигнал/шум радиолинии за счет использования приемной антенны с узкой диаграммой направленности.
Таким образом, предлагаемая система по сравнению с прототипом позволяет уточнить элементы орбиты космического аппарата при его прохождении над наземным пунктом. Тем самым функциональные возможности системы расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2313477C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2305057C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2329921C2 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| ЭКОЛОГИЧЕСКАЯ СИСТЕМА СБОРА ИНФОРМАЦИИ О СОСТОЯНИИ РЕГИОНА | 2004 |
|
RU2275689C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2009 |
|
RU2385246C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2449917C1 |
Предложенная система относится к космической технике и может быть использована на космических аппаратах, находящихся на орбите искусственного спутника Земли, кроме геостационарной, стабилизируемых вращением вдоль вертикальной оси, и на наземных приемных пунктах. Система содержит передатчик аварийного объекта, бортовую аппаратуру космического аппарата и наземную аппаратуру приемного пункта. Бортовая аппаратура космического аппарата включает в себя датчик горизонта, приемную антенну, устройство сравнения, приемник, измеритель частоты Доплера, блокинг-генератор, две схемы совпадения, два вентиля, генератор импульсов, счетчик импульсов, схему коммутации, магнитное запоминающее устройство, передатчик, передающую антенну, формирователь модулирующего кода, генератор высокой частоты и усилитель мощности. В состав наземной аппаратуры приемного пункта входят приемная антенна, усилитель высокой частоты, два смесителя, блок эталонных частот, удвоитель фазы, три узкополосных фильтра, делитель фазы на два, фазовый детектор, измеритель частоты Доплера, вычислительный блок и блок регистрации. За счет уточнения элементов орбиты космического аппарата при его прохождении над наземным приемным пунктом обеспечивается расширение функциональных возможностей системы. 5 ил.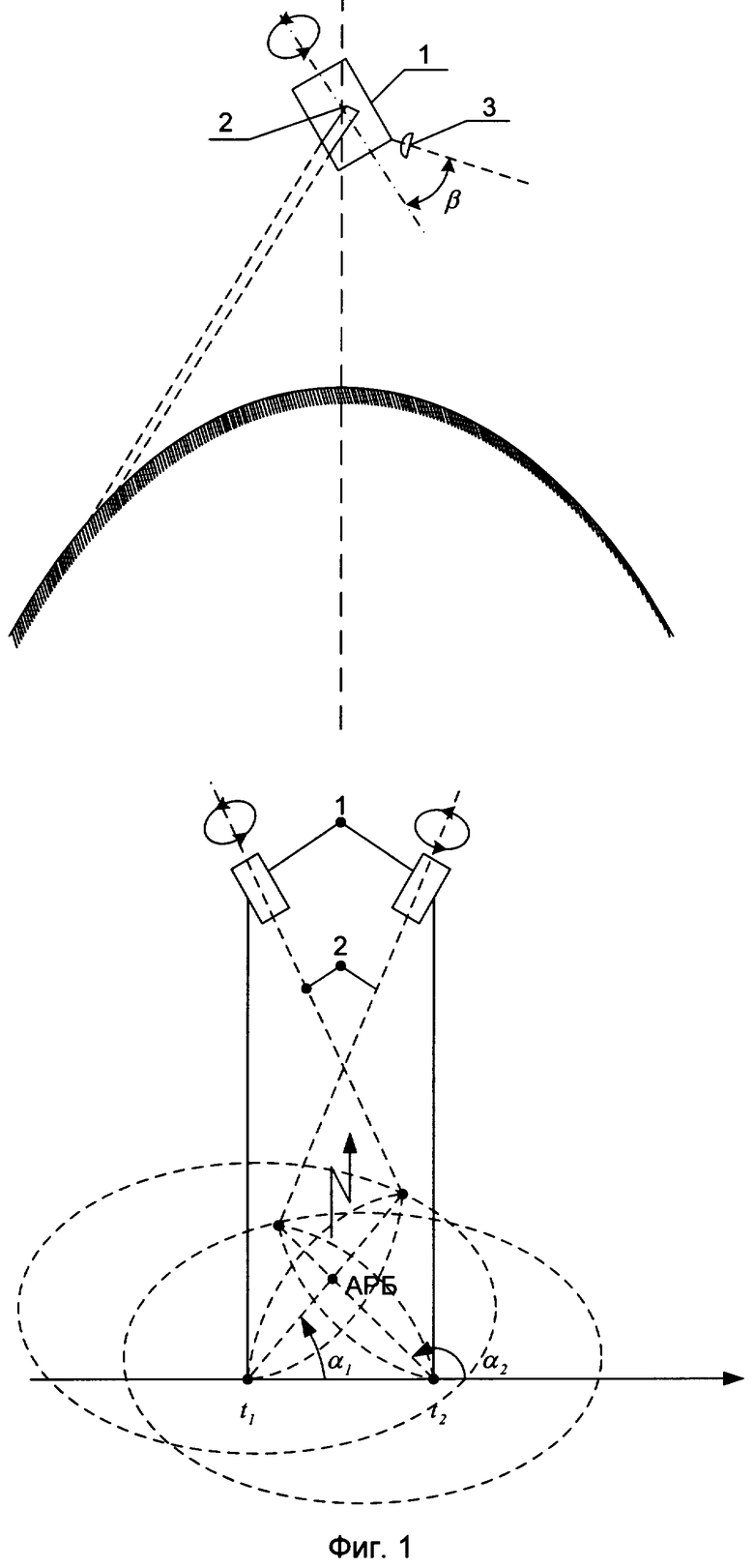
Угломестно-временная допплеровская система для определения координат аварийного объекта, содержащая передатчик аварийного объекта, бортовую аппаратуру космического аппарата и наземную аппаратуру приемного пункта, при этом ось вращения космического аппарата отклонена от местной вертикали, космический аппарат состоит из корпуса, импульсного инфракрасного датчика горизонта, размещенного на одной оси противоположно приемной антенне, механическая ось которой не совпадает с осью вращения космического аппарата, бортовая аппаратура космического аппарата состоит из последовательно включенных приемной антенны, приемника, второй вход которого соединен с первым выходом задающего генератора, измерителя частоты Допплера, второй вход которого соединен с вторым выходом задающего генератора, устройства сравнения, блокинг-генератора, первой схемы совпадения, второй вход которой соединен с вторым выходом приемника, второй схемы совпадения, второй вход которой соединен с вторым выходом блокинг-генератора, первого вентиля, второй вход которого через счетчик импульсов соединен с выходом генератора импульсов и датчика горизонта, схемы коммутации и магнитного запоминающего устройства, ко второму выходу схемы коммутации последовательно подключены передатчик и передающая антенна, к третьему выходу задающего генератора последовательно подключены временное устройство и второй вентиль, второй вход которого соединен с вторым выходом второй схемы совпадения, а выход подключен к второму входу схемы коммутации, отличающаяся тем, что бортовой передатчик выполнен в виде последовательно подключенных к второму выходу схемы коммутации генератора высокой частоты, фазового манипулятора, второй вход которого через формирователь модулирующего кода соединен с выходом магнитного запоминающего устройства, и усилителя мощности, подключенного к передающей антенне, наземная аппаратура приемного пункта выполнена в виде последовательно включенных приемной антенны, усилителя высокой частоты, первого смесителя, второй вход которого соединен с первым выходом блока эталонных частот, усилителя промежуточной частоты, удвоителя фазы, первого узкополосного фильтра, делителя фазы на два, второго узкополосного фильтра, фазового детектора, второй вход которого соединен с выходом усилителя промежуточной частоты, вычислительного блока и блока регистрации, причем к выходу второго узкополосного фильтра последовательно подключены второй смеситель, второй вход которого соединен с вторым выходом блока эталонных частот, третий узкополосный фильтр и измеритель частоты Допплера, выход которого соединен со вторым входом вычислительного блока.
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| RU 2059423 C1, 10.05.1996 | |||
| СПОСОБ ПРИЕМА СИГНАЛОВ С УГЛОВОЙ МОДУЛЯЦИЕЙ | 1990 |
|
RU2040860C1 |

