Область техники, к которой относится изобретение
Настоящее изобретение относится к области автоматического управления вождением и управления безопасностью транспортных средств и, в частности, к способу управления избыточностью, системе автоматического вождения, транспортному средству, контроллеру и машиночитаемому носителю информации для удержания транспортного средства в аварийной полосе движения и замедления при условии, что датчик, или основная подсистемы управления, или исполнительного механизма имеет неисправность, и неисправность является ограниченной.
Уровень техники
Безопасность системы автоматического вождения среднего или высокого уровня (а именно уровня 2,5 и более) зависит от корректности выходных сигналов каждого датчика восприятия. В качестве основного датчика удержания полосы движения передняя камера обычно выполняет распознавание полосы движения в соответствии с системой обучения степени охвата или комбинацией системы обучения степени охвата и классической технологии распознавания изображений. Легко ошибочно распознать кривизну линии полосы движения, особенно центральной линии полосы движения, из-за таких факторов, как освещение, чередование света и темноты, отражение участков воды на дороге, уклон дороги и идентификацию полосы движения. Более того, система объединения мультисенсорного восприятия имеет высокий уровень сложности и низкую вероятность аппаратных или программных сбоев и ошибок вычислений (таких как случайное переключение состояний частичного регистра). Это приводит к проблемам безопасности из-за легко возникающих сбоев и ошибок в системе в процессе удержания полосы движения транспортных средств с автоматическим вождением среднего или высокого уровня. Эта проблема безопасности является еще более фатальной для транспортных средств с автоматическим вождением среднего или высокого уровня, когда водитель или охранник могут отвлекаться, полностью полагаясь на систему автоматического вождения. Таким образом, желательно разработать способ удержания полосы движения и управления транспортным средством в области безопасности в случае неточного обнаружения датчиком кривизны центральной линии полосы движения или при наличии сбоя в работе части системы и в случае если сбой не превышает допустимый уровень.
Сущность изобретения
По меньшей мере, некоторые варианты осуществления настоящего изобретения обеспечивают способ управления избыточностью для системы автоматического вождения, систему автоматического вождения, транспортное средство, контроллер и машиночитаемый носитель данных, которые используются для удержания траектории движения на центральной линии полосы движения при сбое работы системы автоматического вождения, который не превышает допустимое отклонение.
В одном варианте осуществления настоящего изобретения предоставляется способ управления избыточностью для системы автоматического вождения. Система автоматического вождения включает в себя основную подсистему управления и подсистему управления избыточностью. Способ применяется к подсистеме управления избыточностью. Способ включает в себя следующие операции.
Когда активирована функция автоматического вождения системы автоматического вождения, определяется область смещения в полосе движения, где в данный момент времени находится транспортное средство, причем область смещения относится к области, в которой абсолютное значение отношения поперечного расстояния к ширине полосы движения полосы движения, на которой в данный момент находится транспортное средство, находится в пределах конкретного диапазона отношений, и поперечное расстояние относится к расстоянию между линией границы области смещения и центральной линией полосы движения, где транспортное средство в данный момент времени находится, по отношению к транспортному средству в направлении поперечной оси системы координат транспортного средства.
Текущий уровень сбоя основной подсистемы управления определяется в соответствии с областью смещения, где в данный момент времени находится транспортное средство, и результатом управления, выводимым подсистемой управления избыточностью в предшествующем цикле управления.
Активируется функция управления избыточностью, соответствующая текущему уровню сбоя основной подсистемы управления, и транспортное средство управляется в соответствии с функцией управления избыточностью.
В возможном варианте осуществления этап, на котором определяется область смещения в полосе движения, где в данный момент времени находится транспортное средство, включает в себя следующие операции.
Уравнение  безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения устанавливается в соответствии с выводом информации из нескольких источников передней камеры и радара, и определяется ширина
безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения устанавливается в соответствии с выводом информации из нескольких источников передней камеры и радара, и определяется ширина  полосы движения, на которой в данный момент времени находится транспортное средство.
полосы движения, на которой в данный момент времени находится транспортное средство.
Область смещения в полосе движения, где в данный момент времени находится транспортное средство, определяется в соответствии с коэффициентом  уравнения запланированного безопасного пути и шириной полосы движения.
уравнения запланированного безопасного пути и шириной полосы движения.
В возможном варианте осуществления информация из нескольких источников, выводимая камерой и радаром, включает в себя, по меньшей мере, одно из следующего: уравнение  кривой линии полосы движения, уравнение
кривой линии полосы движения, уравнение  кривой края дороги, уравнение
кривой края дороги, уравнение  кривой дорожного ограждения и уравнение
кривой дорожного ограждения и уравнение  кривой транспортного потока, которые планируются относительно начало системы координат транспортного средства. Этап приспособления уравнения безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения в соответствии с информацией из нескольких источников, выводимой передней камерой и радаром, и определения ширины полосы движения, на которой в данный момент времени находится транспортное средство, включает в себя следующее операции.
кривой транспортного потока, которые планируются относительно начало системы координат транспортного средства. Этап приспособления уравнения безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения в соответствии с информацией из нескольких источников, выводимой передней камерой и радаром, и определения ширины полосы движения, на которой в данный момент времени находится транспортное средство, включает в себя следующее операции.
Выбираются  точки продольной позиции в соответствии со скоростью транспортного средства и установленной продолжительностью интервала времени, и продольное расстояние
точки продольной позиции в соответствии со скоростью транспортного средства и установленной продолжительностью интервала времени, и продольное расстояние  между i-й точкой продольной позиции и началом системы координат транспортного средства вычисляется по формуле:
между i-й точкой продольной позиции и началом системы координат транспортного средства вычисляется по формуле:  , где
, где  является скоростью транспортного средства и
является скоростью транспортного средства и  является установленной продолжительностью интервала времени.
является установленной продолжительностью интервала времени.
Посредством формулы:
 определяется левая точка
определяется левая точка  горизонтальной позиции, соответствующая i-й точке продольной позиции.
горизонтальной позиции, соответствующая i-й точке продольной позиции.
Посредством формулы:
 , определяется правая точка горизонтальной позиции, соответствующая i-й точке продольной позиции.
, определяется правая точка горизонтальной позиции, соответствующая i-й точке продольной позиции.
Полученные N точки  позиции левого края полосы движения, где в данный момент времени находится транспортное средство, приспосабливаются в кривую
позиции левого края полосы движения, где в данный момент времени находится транспортное средство, приспосабливаются в кривую  левого края полосы движения, на которой в данный момент времени находится транспортное средство, с использованием выравнивания по способу наименьших квадратов.
левого края полосы движения, на которой в данный момент времени находится транспортное средство, с использованием выравнивания по способу наименьших квадратов.
Полученные N точки  позиции правого края полосы движения, где в данный момент времени находится транспортное средство, приспосабливаются в кривую
позиции правого края полосы движения, где в данный момент времени находится транспортное средство, приспосабливаются в кривую  правого края полосы движения, на которой в данный момент времени находится транспортное средство, с использованием выравнивания по способу наименьших квадратов.
правого края полосы движения, на которой в данный момент времени находится транспортное средство, с использованием выравнивания по способу наименьших квадратов.
Коэффициенты кривой левого края и кривой правого края усредняются по формуле:

получено уравнение безопасного пути для движения транспортного средства по центральной линии полосы движения.
Посредством формулы:
 ,
,
вычисляется ширина полосы движения, на которой в данный момент времени находится транспортное средство,  представляет историческую минимальную ширину полосы движения за прошлый период
представляет историческую минимальную ширину полосы движения за прошлый период  времени и
времени и  .
.
В возможном варианте осуществления этап, на котором область смещения, где в данный момент времени находится транспортное средство, определяется в соответствии с коэффициентом уравнения запланированного пути безопасности и ширина полосы движения включает в себя следующие операции.
Посредством формулы:  ,
,
вычисляется функция  сбоя в соответствии с шириной полосы движения и расстоянием поперечного смещения
сбоя в соответствии с шириной полосы движения и расстоянием поперечного смещения  , которое представляет собой ширину полосы движения для полосы, на которой в данный момент времени находится транспортное средство, и коэффициент , являющийся расстоянием поперечного смещения центральной линии полосы движения относительно начальной точки системы координат транспортного средства.
, которое представляет собой ширину полосы движения для полосы, на которой в данный момент времени находится транспортное средство, и коэффициент , являющийся расстоянием поперечного смещения центральной линии полосы движения относительно начальной точки системы координат транспортного средства.
Когда функция  сбоя меньше, чем первое установленное значение
сбоя меньше, чем первое установленное значение  отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, определяется как первая область
отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, определяется как первая область  смещения.
смещения.
Когда функция сбоя больше или равна первому установленному значению отношения и меньше второго заданного значения  отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, определяется как вторая область
отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, определяется как вторая область  смещения.
смещения.
Когда функция сбоя больше или равна второму заданному значению отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, определяется как третья область  смещения.
смещения.
В возможном варианте осуществления этап, на котором текущий уровень сбоя основной подсистемы управления определяется в соответствии с областью смещения, где в данный момент времени находится транспортное средство, и результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, включает в себя следующие операции.
Когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью первого уровня или, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью второго уровня или, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, не должен активировать функцию управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является третьей областью смещения, текущий уровень сбоя основной подсистемы управления определяется как высокий уровень сбоя.
Когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью второго уровня или, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, не должен активировать функцию управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является второй областью смещения, первая функция  распознавания расположения транспортного средства сравнивается со вторым установленным отношением . Когда первая функция распознавания расположения транспортного средства больше или равна второму установленному отношению , текущий уровень сбоя основной подсистемы управления определяется как высокий уровень сбоя. Когда первая функция распознавания расположения транспортного средства меньше, чем второе заданное отношение, текущий уровень сбоя основной подсистемы управления определяется как средний уровень сбоя.
распознавания расположения транспортного средства сравнивается со вторым установленным отношением . Когда первая функция распознавания расположения транспортного средства больше или равна второму установленному отношению , текущий уровень сбоя основной подсистемы управления определяется как высокий уровень сбоя. Когда первая функция распознавания расположения транспортного средства меньше, чем второе заданное отношение, текущий уровень сбоя основной подсистемы управления определяется как средний уровень сбоя.
Когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью второго уровня или, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, не должен активировать функцию управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является первой областью смещения, текущий уровень сбоя основной подсистемы управления определяется как низкий уровень сбоя.
В возможном варианте осуществления первая функция распознавания расположения транспортного средства вычисляется по формуле:
 ,
,
где  является достоверностью распознавания, является константой или получается путем подбора нейронной сети радиальных базисных функций (RBF) в соответствии со скоростью
является достоверностью распознавания, является константой или получается путем подбора нейронной сети радиальных базисных функций (RBF) в соответствии со скоростью  транспортного средства, скоростью
транспортного средства, скоростью  рыскания транспортного средства, углом
рыскания транспортного средства, углом  поворота рулевого колеса, кривизной
поворота рулевого колеса, кривизной  центральной линии полосы движения и коэффициент
центральной линии полосы движения и коэффициент  сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы движения, на которой в данный момент времени находится транспортное средство, распознаваемый передней камерой; когда является константой,
сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы движения, на которой в данный момент времени находится транспортное средство, распознаваемый передней камерой; когда является константой,  ; когда получается путем подбора нейронной сети RBF, диапазон значений
; когда получается путем подбора нейронной сети RBF, диапазон значений  составляет:
составляет:  .
.
S является переменная скользящего режима, рассчитываемая по формуле:
 ,
,
уравнение гиперплоскости скользящего режима удовлетворяет:  .
.
 является шириной полосы движения, на которой в данный момент находится транспортное средство;
является шириной полосы движения, на которой в данный момент находится транспортное средство;  является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;
является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;  является путевым углом транспортного средства;
является путевым углом транспортного средства;  является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины
является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины  полосы движения,;
полосы движения,;  является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; является безопасным путевым углом рассчитывается по формуле:
является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; является безопасным путевым углом рассчитывается по формуле:
 , где
, где  является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия;
является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия;  является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия;
является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия;  является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
 ,
,
 является протектором транспортного средства,
является протектором транспортного средства,  является высотой центра масс транспортного средства,
является высотой центра масс транспортного средства,  является ускорением свободного падения, и
является ускорением свободного падения, и  является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемой передней камерой.
является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемой передней камерой.
В возможном варианте осуществления этап, на котором активируется функция управления избыточностью, соответствующая текущему уровню сбоя основной подсистемы управления, включает в себя следующие операции.
Когда текущий уровень сбоя основной подсистемы управления является высоким уровнем сбоя, активируется функция управления избыточностью первого уровня. Когда текущий уровень сбоя основной подсистемы управления является средним уровнем сбоя, активируется функция управления избыточностью второго уровня. Когда текущий уровень сбоя основной подсистемы управления является низким уровнем сбоя, деактивируется функция управления избыточностью первого уровня или функция управления избыточностью второго уровня.
В возможном варианте осуществления этап управления транспортным средством в соответствии с функцией управления избыточностью включает в себя следующие операции.
Когда активирована функция избыточного управления первого уровня, электронная система курсовой устойчивости (ESP) управляется для замедления до первого целевого замедления в соответствии с рассчитанным полным замедлением  , и электроусилитель руля (EPS) управляется для управления углом поворота рулевого колеса в течение гибкого периода
, и электроусилитель руля (EPS) управляется для управления углом поворота рулевого колеса в течение гибкого периода  времени управления в соответствии с расчетным целевым углом
времени управления в соответствии с расчетным целевым углом  поворота рулевого колеса и максимальным крутящим моментом
поворота рулевого колеса и максимальным крутящим моментом  безопасности.
безопасности.
Когда активируется функция управления избыточностью второго уровня, ESP управляется для замедления до второго целевого замедления в соответствии с безопасным замедлением  , вычисленным второй функцией
, вычисленным второй функцией  распознавания расположения транспортного средства и выходным сигналом замедления
распознавания расположения транспортного средства и выходным сигналом замедления  основной подсистемы управления.
основной подсистемы управления.
Полное замедление является большее значение безопасного замедления , вычисленное в соответствии со второй функцией распознавания расположения транспортного средства и выходным сигналом замедления  основной подсистемы управления; первая целевая скорость связана с текущими рабочими условиями вождения; вторая целевая скорость связана с целевой скоростью, вырабатываемой основной подсистемой управления, и вторая целевая скорость меньше целевой скорости, вырабатываемой основной подсистемой управления.
основной подсистемы управления; первая целевая скорость связана с текущими рабочими условиями вождения; вторая целевая скорость связана с целевой скоростью, вырабатываемой основной подсистемой управления, и вторая целевая скорость меньше целевой скорости, вырабатываемой основной подсистемой управления.
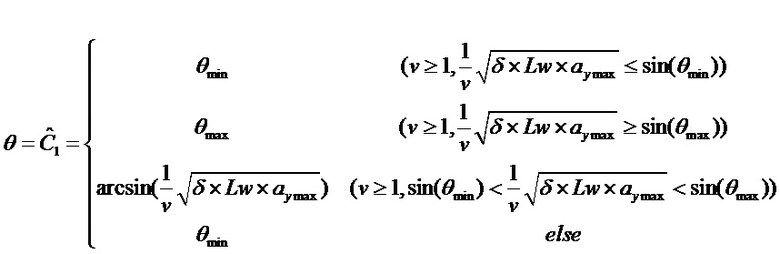
В возможном варианте реализации по формуле:

рассчитывается целевой угол  поворота рулевого колеса.
поворота рулевого колеса.  является кривизна центральной линии полосы движения; является путевым углом транспортного средства;
является кривизна центральной линии полосы движения; является путевым углом транспортного средства;  является шириной полосы движения, на которой в данный момент находится транспортное средство;
является шириной полосы движения, на которой в данный момент находится транспортное средство;  является передаточным числом системы рулевого управления транспортного средства;
является передаточным числом системы рулевого управления транспортного средства;  является адаптивным параметром;
является адаптивным параметром;  является осью транспортного средства;
является осью транспортного средства;  является скоростью транспортного средства;
является скоростью транспортного средства;  является начальное значение адаптивного параметра и является константой; является коэффициентом безопасного расстояния поперечного смещения, равный половине ширины полосы движения,
является начальное значение адаптивного параметра и является константой; является коэффициентом безопасного расстояния поперечного смещения, равный половине ширины полосы движения,  ; S является переменной скользящего режима, вычисляемой по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет: ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
; S является переменной скользящего режима, вычисляемой по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет: ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым системой обнаружения транспортного средства.
Адаптивный параметр  рассчитывается по формуле:
рассчитывается по формуле:
 ;
;
является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;  является функцией мертвой зоны для мертвой зоны
является функцией мертвой зоны для мертвой зоны  , и функция равна нулю;
, и функция равна нулю;  является скоростью рыскания транспортного средства; является коэффициентом безопасного расстояния поперечного смещения, равный половине ширины полосы движения, ;
является скоростью рыскания транспортного средства; является коэффициентом безопасного расстояния поперечного смещения, равный половине ширины полосы движения, ;  является параметром безопасной скорости рыскания, установленный для предотвращения слишком большой относительной скорости рыскания транспортного средства,
является параметром безопасной скорости рыскания, установленный для предотвращения слишком большой относительной скорости рыскания транспортного средства,  является параметром адаптивной скорости и
является параметром адаптивной скорости и  является адаптивной верхней границей.
является адаптивной верхней границей.
В возможном варианте реализации по формуле:

рассчитывается целевой угол поворота рулевого колеса. является кривизной центральной линии полосы движения; является путевым углом транспортного средства; является шириной полосы движения, на которой в данный момент находится транспортное средство; является передаточным числом системы рулевого управления транспортного средства; является адаптивным параметром; является осью транспортного средства; является скоростью транспортного средства; является начальным значением адаптивного параметра, является константой; является коэффициентом безопасного расстояния поперечного смещения, равный половине ширины полосы движения, ; S является переменной скользящего режима, вычисляемая по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет: ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол с рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым передней камерой.
Адаптивный параметр рассчитывается по формуле:
;
является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является функцией мертвой зоны для мертвой зоны, и функция равна нулю; является скоростью рыскания транспортного средства; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; является параметр безопасной скорости рыскания, установленный для предотвращения слишком большой относительной скорости рыскания транспортного средства, является параметром адаптивной скорости и является адаптивной верхней границей.
Функция насыщения:  ; функция квази-насыщения:
; функция квази-насыщения:  ;
;  является произвольной непрерывной функцией, удовлетворяющая
является произвольной непрерывной функцией, удовлетворяющая  ,
,  ,
,  ;
;  является шириной пограничного слоя квази-скользящего режима, и является постоянной величиной.
является шириной пограничного слоя квази-скользящего режима, и является постоянной величиной.
В возможном варианте осуществления согласно второй функции  распознавания расположения транспортного средства рассчитывается безопасное замедление
распознавания расположения транспортного средства рассчитывается безопасное замедление  по формуле:
по формуле:
является ускорение свободного падения; является коэффициентом сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы движения, на которой в данный момент времени находится транспортное средство, распознаваемое передней камерой;  является максимально безопасным замедлением транспортного средства,
является максимально безопасным замедлением транспортного средства,  ;
;  является минимальным безопасным замедлением транспортного средства и
является минимальным безопасным замедлением транспортного средства и  является постоянной;
является постоянной;  является моментом времени, когда транспортное средство въезжает во вторую область
является моментом времени, когда транспортное средство въезжает во вторую область  смещения из первой области смещения;
смещения из первой области смещения;  является текущим моментом времени; является скоростью рыскания транспортного средства; является скоростью транспортного средства.
является текущим моментом времени; является скоростью рыскания транспортного средства; является скоростью транспортного средства.
 является коэффициентом замедления, определяемый в зависимости от управляемости и устойчивости шасси транспортного средства, рассчитываемый по формуле:
является коэффициентом замедления, определяемый в зависимости от управляемости и устойчивости шасси транспортного средства, рассчитываемый по формуле:  ;
;  является скорость миграции критической нагрузки с точки зрения безопасности, и является постоянной величиной;
является скорость миграции критической нагрузки с точки зрения безопасности, и является постоянной величиной;  является средней скоростью миграции нагрузки, рассчитываемая по формуле:
является средней скоростью миграции нагрузки, рассчитываемая по формуле:  ,
,  является текущим моментом времени,
является текущим моментом времени,  является моментом времени определения, является протектором транспортного средства и является высота центра масс транспортного средства.
является моментом времени определения, является протектором транспортного средства и является высота центра масс транспортного средства.
 является количественным интегральным параметром оценки сбоя, рассчитываемый по формуле:
является количественным интегральным параметром оценки сбоя, рассчитываемый по формуле:  ,
,  является приращением критического для безопасности путевого угла, и является константой.
является приращением критического для безопасности путевого угла, и является константой.
S является переменной скользящего режима, рассчитываемая по формуле:  ; является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является путевым углом транспортного средства; является кривизной центральной линии полосы движения; является шириной полосы движения, на которой в данный момент находится транспортное средство; является коэффициентом безопасности расстояния поперечного смещения, равным половине ширины полосы движения, ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; является безопасным путевым углом, рассчитываемым по формуле:
; является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является путевым углом транспортного средства; является кривизной центральной линии полосы движения; является шириной полосы движения, на которой в данный момент находится транспортное средство; является коэффициентом безопасности расстояния поперечного смещения, равным половине ширины полосы движения, ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; является безопасным путевым углом, рассчитываемым по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; является максимальным безопасным поперечным ускорением транспортного средства рассчитывается по формуле:
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым системой обнаружения транспортного средства.
В возможном варианте осуществления
максимальный крутящий момент  безопасности рассчитывается по формуле:
безопасности рассчитывается по формуле:  .
.
Первый крутящий момент  получается путем поиска таблицы в соответствии со скоростью
получается путем поиска таблицы в соответствии со скоростью  транспортного средства для транспортного средства из заранее установленной таблицы отношений скорости транспортного средства и первого крутящего момента
транспортного средства для транспортного средства из заранее установленной таблицы отношений скорости транспортного средства и первого крутящего момента  , и второй крутящий момент
, и второй крутящий момент  выводится посредством EPS; посредством формулы:
выводится посредством EPS; посредством формулы:
рассчитывается период  гибкого управления, и период гибкого управления удовлетворяет:
гибкого управления, и период гибкого управления удовлетворяет:  .
.
В возможном варианте осуществления этап, на котором EPS управляется для управления углом поворота рулевого колеса в период времени гибкого управления в соответствии с вычисленным целевым углом поворота рулевого колеса и максимальным крутящим моментом безопасности, включает в себя следующие операции.
Значение  команды угла поворота рулевого колеса интерполяции, соответствующее различным моментам
команды угла поворота рулевого колеса интерполяции, соответствующее различным моментам  интерполяции, определяется посредством интерполяции сигмоидной функции;
интерполяции, определяется посредством интерполяции сигмоидной функции;
посредством формулы: 
вычисляется значение команды угла поворота рулевого колеса для интерполяции и период  времени интерполяции, является разностью между фактическим значением
времени интерполяции, является разностью между фактическим значением  обратной связи угла поворота рулевого колеса транспортного средства, соответствующим моменту времени, когда активирована функция управления избыточностью первого уровня, и целевым углом
обратной связи угла поворота рулевого колеса транспортного средства, соответствующим моменту времени, когда активирована функция управления избыточностью первого уровня, и целевым углом  поворота рулевого колеса.
поворота рулевого колеса.
Угол поворота рулевого колеса с интерполяцией, соответствующий каждому моменту t интерполяции в течение гибкого периода  времени управления, выводится в EPS, так что EPS регулирует угол поворота рулевого колеса транспортного средства от фактического значения обратной связи угла поворота рулевого колеса до значения команды угла поворота рулевого колеса интерполяции при условии максимального крутящего момента
времени управления, выводится в EPS, так что EPS регулирует угол поворота рулевого колеса транспортного средства от фактического значения обратной связи угла поворота рулевого колеса до значения команды угла поворота рулевого колеса интерполяции при условии максимального крутящего момента  безопасности.
безопасности.
В возможном варианте осуществления способ дополнительно включает в себя следующие операции.
В случае, если система автоматического вождения является системой автоматического вождения высокого уровня L4 или L5, когда транспортное средство управляется в соответствии с функцией управления избыточностью первого уровня или функцией управления избыточностью второго уровня, оценивается, удовлетворяются ли следующие требования: область смещения, где в данный момент времени находится транспортное средство, стабилизируется, чтобы быть первой областью  смещения, независимо от того, меньше ли скорость транспортного средства минимальной предельной скорости транспортного средства на полосе движения, где транспортное средство в данный момент времени находится, и дорожное состояние полосы движения, на которой в данный момент находится транспортное средство, является хорошим дорожным состоянием.
смещения, независимо от того, меньше ли скорость транспортного средства минимальной предельной скорости транспортного средства на полосе движения, где транспортное средство в данный момент времени находится, и дорожное состояние полосы движения, на которой в данный момент находится транспортное средство, является хорошим дорожным состоянием.
Когда требования соблюдены, выводится оперативная информация для запроса безопасности взять транспортное средство под контроль.
Оценивается, принято ли транспортное средство под управление.
Когда система безопасности берет на себя управление транспортным средством, функция управления избыточностью первого уровня или функция управления избыточностью второго уровня завершается и прекращается вывод любой команды управления в EPS и ESP.
В случае, когда система автоматического вождения представляет собой систему автоматического вождения среднего уровня L2.5 или L3, когда транспортное средство управляется в соответствии с функцией управления избыточностью первого уровня или функцией управления избыточностью второго уровня, выводится оперативная информация для запроса водителя взять управление транспортным средством на себя.
Оценивается, принимает ли водитель управление транспортным средством на себя.
Когда водитель берет на себя управление транспортным средством, функция управления избыточностью первого уровня или функция управления избыточностью второго уровня отключаются и прекращается вывод любой команды управления в EPS и ESP.
В другом варианте осуществления настоящего изобретения дополнительно предусмотрена система автоматического вождения. Система автоматического вождения включает в себя основную подсистему управления и подсистему управления избыточностью. Подсистема управления избыточностью включает в себя:
первый компонент определения, выполненный с возможностью определять, когда активирована функция автоматического вождения системы автоматического вождения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, причем область смещения относится к области, в которой абсолютное значение отношения поперечного расстояния к ширине полосы движения, где в данный момент времени находится транспортное средство, находится в пределах конкретного диапазона отношений, и поперечное расстояние относится к расстоянию между линией границы области смещения и центральной линией полосы движения, на которой транспортное средство в данный момент времени находится, по отношению к транспортному средству в направлении поперечной оси системы координат транспортного средства;
второй компонент определения, выполненный с возможностью определять текущий уровень сбоя основной подсистемы управления в соответствии с областью смещения, где в данный момент времени находится транспортное средство, и результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления; и
компонент арбитража, выполненный с возможностью активировать функцию управления избыточностью, соответствующую текущему уровню сбоя основной подсистемы управления, и управлять транспортным средством в соответствии с функцией управления избыточностью.
В возможном варианте осуществления первый компонент определения включает в себя:
элемент приспособления, выполненный с возможностью приспосабливать уравнение безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения в соответствии с информацией из нескольких источников, выводимой передней камерой и радаром, и определять ширину полосы движения, на которой в данный момент времени находится транспортное средство; и
первый элемент определения, выполненный с возможностью определять область смещения в полосе движения, где в данный момент времени находится транспортное средство, в соответствии с коэффициентом уравнения запланированного безопасного пути и шириной полосы движения.
В дополнительном варианте осуществления информация из нескольких источников, выводимая камерой и радаром, включает в себя, по меньшей мере, одно из следующего: уравнение кривой линии полосы движения, уравнение кривой края дороги, уравнение кривой дорожного ограждения и уравнение кривой транспортного потока, которые планируются относительно начало системы координат транспортного средства. Элемент приспособления выполнен с возможностью выбирать точки продольной позиции в соответствии со скоростью транспортного средства и заданной продолжительности временного интервала, и вычислять продольное расстояние между i-й точкой продольной позиции и началом системы координат транспортного средства по формуле: , где является скоростью транспортного средства и является установленной продолжительностью временного интервала; посредством формулы:
, определить левую точку горизонтальной позиции, соответствующую i-й точке продольной позиции;
посредством формулы:
, определить правую точку горизонтальной позиции, соответствующую i-й точке продольной позиции;
приспосабливать полученные N точки позиции левого края полосы движения, где в данный момент времени находится транспортное средство, к кривой левого края полосы, на которой в данный момент времени находится транспортное средство, с использованием способа выравнивания по способу наименьших квадратов;
приспосабливать полученные N точки позиции правого края полосы движения, где в данный момент времени находится транспортное средство, к кривой правого края полосы движения, на которой в данный момент времени находится транспортное средство, с использованием выравнивания по способу наименьших квадратов;
средние коэффициенты кривой левого края и кривой правого края, и по формуле:
,
получить уравнение безопасного пути для движения транспортного средства по средней линии полосы движения;
посредством формулы:
,
вычислить ширину полосы движения, на которой в данный момент времени находится транспортное средство, представляет историческую минимальную ширину полосы движения за прошлый период времени, и .
В возможном варианте осуществления первый элемент определения включает в себя:
первый подэлемент вычисления, выполненный с возможностью вычислять по формуле:
функция сбоя в соответствии с шириной полосы движения и расстоянием поперечного смещения, является шириной полосы движения полосы, на которой в данный момент времени находится транспортное средство, и коэффициент является расстоянием поперечного смещения центральной линии полосы движения относительно начала координат системы;
первый подэлемент определения, выполненный с возможностью определять, когда функция сбоя меньше, чем первое заданное значение отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве первой области смещения;
второй подэлемент определения, выполненный с возможностью определять, когда функция сбоя больше или равна первому заданному значению отношения и меньше второго заданного значения отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, является второй областью смещения; и
третий подэлемент определения, выполненный с возможностью определять, когда функция сбоя больше или равна второму установленному значению отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве третьей области смещения.
В возможном варианте осуществления второй компонент определения включает в себя:
второй элемент определения, выполненный с возможностью определять, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью первого уровня или, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления должен активировать функцию управления избыточностью второго уровня или, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, не должен активировать функцию управления избыточностью, но область смещения в полосе движения, где транспортное средство в данный момент времени находится, является третьей областью смещения, текущий уровень сбоя основной подсистемы управления как высокий уровень сбоя;
третий элемент определения, включающий в себя: подэлемент сравнения, выполненный с возможностью дополнительно сравнивать, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью второго уровня или, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления не должен активировать функцию управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является второй областью смещения, первая функция распознавания расположения транспортного средства сравнивается со вторым установленным отношением ; четвертый подэлемент определения, выполненный с возможностью определять, когда первая функция распознавания расположения транспортного средства больше или равна второму установленному отношению , текущий уровень сбоя основной подсистемы управления как высокий уровень сбоя; и пятый подэлемент определения, выполненный с возможностью определять, когда первая функция распознавания расположения транспортного средства меньше, чем второе заданное отношение , текущий уровень сбоя основной подсистемы управления, как средний уровень сбоя; и
четвертый элемент определения, выполненный с возможностью определять, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью второго уровня или, когда результат управления выводится подсистемой управления избыточностью в предшествующем цикле управления не должен активировать функцию управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является первой областью смещения, текущий уровень сбоя основной подсистемы управления является низким уровнем сбоя.
В возможном варианте подэлемент сравнения выполнен с возможностью:
рассчитать по формуле:
,
первую функцию распознавания расположения транспортного средства, где является степенью достоверности распознавания, является постоянной величиной или получена путем подбора нейронной сети RBF в соответствии со скоростью транспортного средства, скоростью рыскания транспортного средства, углом поворота рулевого колеса, центром полосы движения кривизна линии и коэффициент сцепления с поверхностью дороги, соответствующий типу поверхности дороги полосы, на которой в данный момент времени находится транспортное средство, распознаваемая передней камерой; когда является константой, ; когда получено путем подбора нейронной сети RBF, диапазон значений составляет: ;
S является переменной скользящего режима, рассчитываемая по формуле:
,
уравнение гиперплоскости скользящего режима удовлетворяет: ;
является шириной полосы движения, на которой в данный момент находится транспортное средство; является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является путевым углом транспортного средства; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; является безопасный путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
,
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым передней камерой.
В возможном варианте реализации арбитражный компонент включает в себя:
первый элемент активации, выполненный с возможностью активировать, когда текущий уровень сбоя основной подсистемы управления является высоким уровнем сбоя, функцию управления избыточностью первого уровня;
второй элемент активации, выполненный с возможностью активировать, когда текущий уровень сбоя основной подсистемы управления является средним уровнем сбоя, функцию управления избыточностью второго уровня; и
элемент отключения, выполненный с возможностью деактивировать, когда текущий уровень сбоя основной подсистемы управления является низким уровнем сбоя, функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня.
В возможном варианте осуществления компонент арбитража дополнительно включает в себя:
первый элемент управления, выполненный с возможностью управлять, когда активирована функция управления с избыточностью первого уровня, ESP для замедления до первого целевого замедления в соответствии с рассчитанным полным замедлением , и управлять EPS для управления углом поворота рулевого колеса в периоде времени гибкого управления в соответствии с расчетным целевым углом поворота рулевого колеса и максимальным крутящим моментом безопасности; и
второй элемент управления, выполненный с возможностью управлять, когда активирована функция управления избыточностью второго уровня, ESP для замедления до второго целевого замедления в соответствии с безопасным замедлением , вычисленным второй функцией распознавания расположения транспортного средства и замедления основной подсистемой управления.
Полное замедление является большим значением безопасного замедления, вычисленное в соответствии со второй функцией распознавания расположения транспортного средства и выходным замедлением основной подсистемы управления; первая целевая скорость относится к текущим рабочим условиям вождения; вторая целевая скорость относится к целевой скорости, вырабатываемой основной подсистемой управления, и вторая целевая скорость меньше целевой скорости, вырабатываемой основной подсистемой управления.
В возможном варианте осуществления первый элемент управления выполнен с возможностью рассчитать по формуле:
целевой угол поворота рулевого колеса, где является кривизной центральной линии полосы движения; является путевым углом транспортного средства; является шириной полосы движения, где в данный момент находится транспортное средство; является передаточным отношением системы рулевого управления транспортного средства; является адаптивным параметром; является осью транспортного средства; является скоростью транспортного средства; является начальным значением адаптивного параметра и является константой; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; S является переменной скользящего режима, вычисляемая по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет: ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым системой обнаружения транспортного средства;
адаптивный параметр рассчитывается по формуле:
;
является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является функцией мертвой зоны для мертвой зоны , и функция равна нулю; является скоростью рыскания транспортного средства; является коэффициентом безопасности расстояния поперечного смещения, равным половине ширины полосы движения, ; является параметром безопасной скорости рыскания, установленный для предотвращения слишком большой относительной скорости рыскания транспортного средства, является параметром адаптивной скорости и является адаптивной верхней границей.
В возможном варианте осуществления первый элемент управления выполнен с возможностью рассчитать по формуле:
,
целевой угол поворота рулевого колеса, где является кривизной центральной линии полосы движения; является путевым углом транспортного средства; является шириной полосы движения, на которой в данный момент находится транспортное средство; является передаточным отношением системы рулевого управления транспортного средства; является адаптивным параметром; является осью транспортного средства; является скоростью транспортного средства; является начальным значением адаптивного параметра и является константой; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; S является переменной скользящего режима, вычисляемая по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет: ; является безопасный путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
,
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым передней камерой;
адаптивный параметр рассчитывается по формуле:
;
является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является функцией мертвой зоны для мертвой зоны и  функция равна нулю; является скоростью рыскания транспортного средства; является коэффициентом безопасности расстояния поперечного смещения, равным половине ширины полосы движения, ; представляет собой набор параметров безопасной скорости рыскания для предотвращения слишком большой относительной скорости рыскания транспортного средства, является параметром адаптивной скорости и является адаптивной верхней границей;
функция равна нулю; является скоростью рыскания транспортного средства; является коэффициентом безопасности расстояния поперечного смещения, равным половине ширины полосы движения, ; представляет собой набор параметров безопасной скорости рыскания для предотвращения слишком большой относительной скорости рыскания транспортного средства, является параметром адаптивной скорости и является адаптивной верхней границей;
функция насыщения: функция квази-насыщения: , является произвольная непрерывная функция, удовлетворяющая , , ; является шириной пограничного уровня квази-скользкого режима и является постоянной величиной.
В возможном варианте осуществления первый элемент управления и второй элемент управления выполнены с возможностью рассчитать по формуле:
безопасное замедление ,
где является ускорение свободного падения; является коэффициентом сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемое передней камерой; является максимально безопасным замедлением транспортного средства, ; является минимально безопасным замедлением транспортного средства и является постоянной величиной; является моментом времени, когда транспортное средство въезжает во вторую область смещения из первой области смещения; является текущим моментом времени; является скоростью рыскания транспортного средства; является скоростью транспортного средства;
является коэффициентом замедления, определяемый в зависимости от управляемости и устойчивости шасси транспортного средства, рассчитываемый по формуле: ; является скоростью миграции критической нагрузки с точки зрения безопасности и является постоянной величиной; является средней скоростью миграции нагрузки, вычисляемая по формуле: , является текущим моментом времени, является момент времени определения, является протектором транспортного средства и является высотой центра масс транспортного средства;
является количественным интегральным параметром оценки сбоя, рассчитываемый по формуле: , является приращением критического для безопасности путевого угла, и является константой;
S является переменной скользящего режима, рассчитываемой по формуле: ; является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является путевым углом транспортного средства; является кривизной центральной линии полосы движения; является шириной полосы движения, на которой в данный момент находится транспортное средство; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
,
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым системой обнаружения транспортного средства.
В возможном варианте осуществления первый элемент управления выполнен с возможностью рассчитать по формуле:
максимальный крутящий момент безопасности,
и первый крутящий момент получается путем поиска таблицы согласно скорости транспортного средства для транспортного средства из предварительно установленной таблицы отношений скорости транспортного средства и первого крутящего момента и второго крутящего момента , выработанным EPS; посредством формулы:
рассчитывается гибкий период управления и гибкий период управления удовлетворяет: .
В возможном варианте осуществления первый элемент управления выполнен с возможностью:
определять значение команды интерполяционного угла поворота рулевого колеса, соответствующее различным моментам интерполяции, посредством интерполяции сигмоидной функции посредством формулы:
вычислить значение команды интерполяционного угла поворота рулевого колеса и период времени интерполяции,  является разницей между фактическим значением обратной связи угла поворота рулевого колеса транспортного средства, соответствующим моменту времени, когда активирована функция управления избыточностью первого уровня, и целевым углом поворота рулевого колеса; и
является разницей между фактическим значением обратной связи угла поворота рулевого колеса транспортного средства, соответствующим моменту времени, когда активирована функция управления избыточностью первого уровня, и целевым углом поворота рулевого колеса; и
вырабатывать в EPS интерполяционный угол поворота рулевого колеса, соответствующий каждому моменту t интерполяции в течение гибкого периода времени управления, так что EPS регулирует угол поворота рулевого колеса транспортного средства от фактического значения обратной связи угла поворота рулевого колеса до значения команды интерполяционного угла поворота рулевого колеса при условии максимального крутящего момента безопасности.
В возможном варианте осуществления компонент арбитража дополнительно включает в себя:
первый элемент оценки, выполненный с возможностью оценивать, в случае, когда система автоматического вождения является системой автоматического вождения высокого уровня L4 или L5, когда транспортное средство управляется в соответствии с функцией управления избыточностью первого уровня или управляется в соответствии с функцией управления избыточностью второго уровня, удовлетворяется ли следующие требования: область смещения, где в данный момент времени находится транспортное средство, стабилизирована, чтобы быть первой областью смещения, меньше ли скорость транспортного средства наименьшей предельной скорости транспортного средства на полосе движения, где транспортное средство в данный момент времени находится или нет, и является ли хорошим дорожным состоянием дорожное состояние полосы движения, где в данный момент времени находится транспортное средство;
первый элемент вывода, выполненный с возможностью вывода, когда требования выполнены, оперативной информации для побуждения безопасности взять под свой контроль транспортное средство;
второй элемент оценки, выполненный с возможностью определять, принимает ли безопасность контроль над транспортным средством;
первый элемент отключения, выполненный с возможностью отключать, когда безопасность берет на себя контроль за транспортным средством, функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня, и прекращать вывод любой команды управления в EPS и ESP;
второй элемент вывода, выполненный с возможностью выводить, в случае, когда система автоматического вождения является системой автоматического вождения среднего уровня L2.5 или L3, когда транспортное средство управляется в соответствии с функцией управления избыточностью первого уровня или функцией управления избыточностью второго уровня, оперативную информацию для побуждения водителя взять на себя управление транспортным средством;
третий элемент оценки, выполненный с возможностью определять, берет ли водитель на себя управление транспортным средством; и
второй элемент отключения, выполненный с возможностью отключить, когда безопасность берет на себя контроль над транспортным средством, функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня, и прекратить вывод любой команды управления в EPS и ESP.
В другом варианте осуществления настоящего изобретения дополнительно предоставляется транспортное средство с функцией автоматического вождения, которое включает в себя указанную выше систему автоматического вождения.
В другом варианте осуществления настоящего изобретения дополнительно предоставляется контроллер, который включает в себя память и процессор. В памяти хранится по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд, указанные по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд загружаются и выполняются процессором для реализации вышеуказанного способа управления избыточностью.
В другом варианте осуществления настоящего изобретения дополнительно предоставляется машиночитаемый носитель данных, который хранит по меньшей мере одну команду, по меньшей мере одну программу, набор кодов или набор команд, указанные по меньшей мере одна команда, по меньшей мере одну программа, набор кодов или набор команд загружаются и выполняются процессором для реализации вышеупомянутого способа управления избыточностью.
Полезные эффекты, по меньшей мере, некоторых вариантов осуществления настоящего изобретения заключаются в следующем.
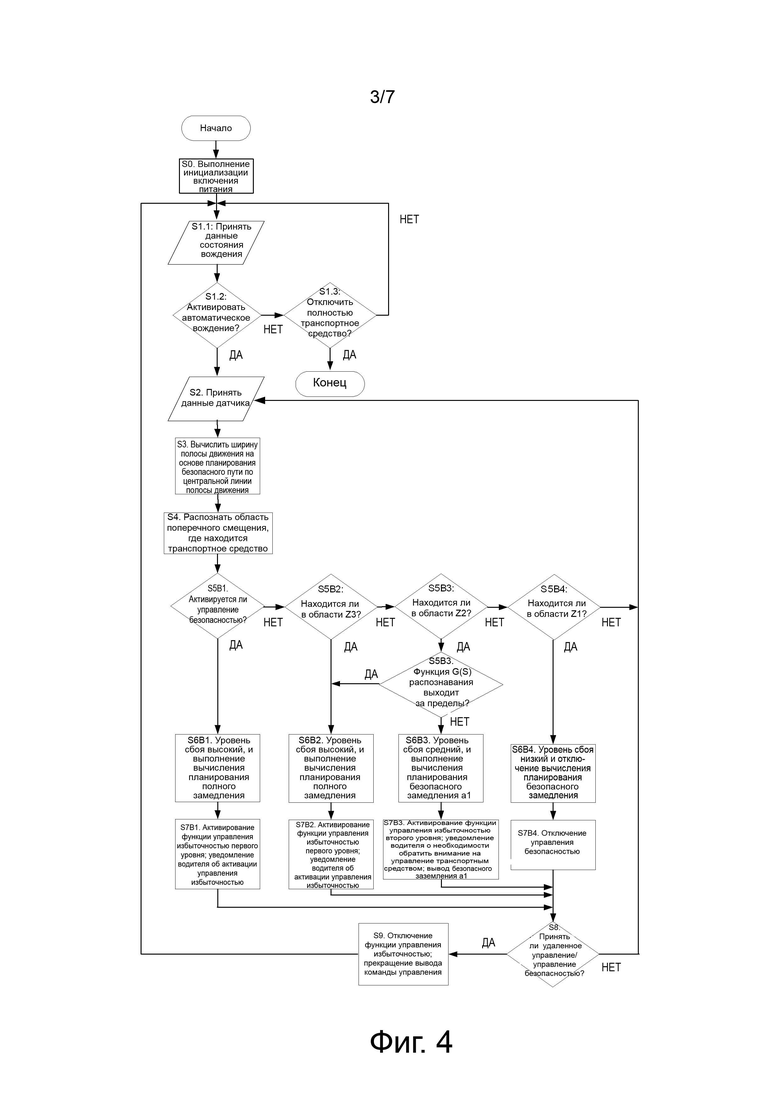
Когда внешняя сторона кузова транспортного средства и линия края полосы движения находятся в непосредственной близости друг к другу (в области Z2), остается некоторый запас безопасного расстояния между шиной и линией края полосы движения; или, когда кузов транспортного средства в данный момент времени находится (в области Z1) и расположение кузова является потенциально опасным ( ), выполняется управление избыточностью путем активации функции управления избыточностью. По меньшей мере, в некоторых вариантах осуществления настоящего изобретения конкретный способ выполнения управления избыточностью является следующим: в соответствии с постепенным увеличением угла поворота рулевого колеса в соответствии с адаптивной скоростью и скоростью приближения в скользящем режиме направление компенсации является внутренней стороной полосы движения, и транспортное средство движется в сторону, близкую к центральной линии полосы движения. Между тем скорость транспортного средства снижается во взаимодействии с продольным управлением и в процессе поперечного управления транспортным средством повышается стабильность.
), выполняется управление избыточностью путем активации функции управления избыточностью. По меньшей мере, в некоторых вариантах осуществления настоящего изобретения конкретный способ выполнения управления избыточностью является следующим: в соответствии с постепенным увеличением угла поворота рулевого колеса в соответствии с адаптивной скоростью и скоростью приближения в скользящем режиме направление компенсации является внутренней стороной полосы движения, и транспортное средство движется в сторону, близкую к центральной линии полосы движения. Между тем скорость транспортного средства снижается во взаимодействии с продольным управлением и в процессе поперечного управления транспортным средством повышается стабильность.
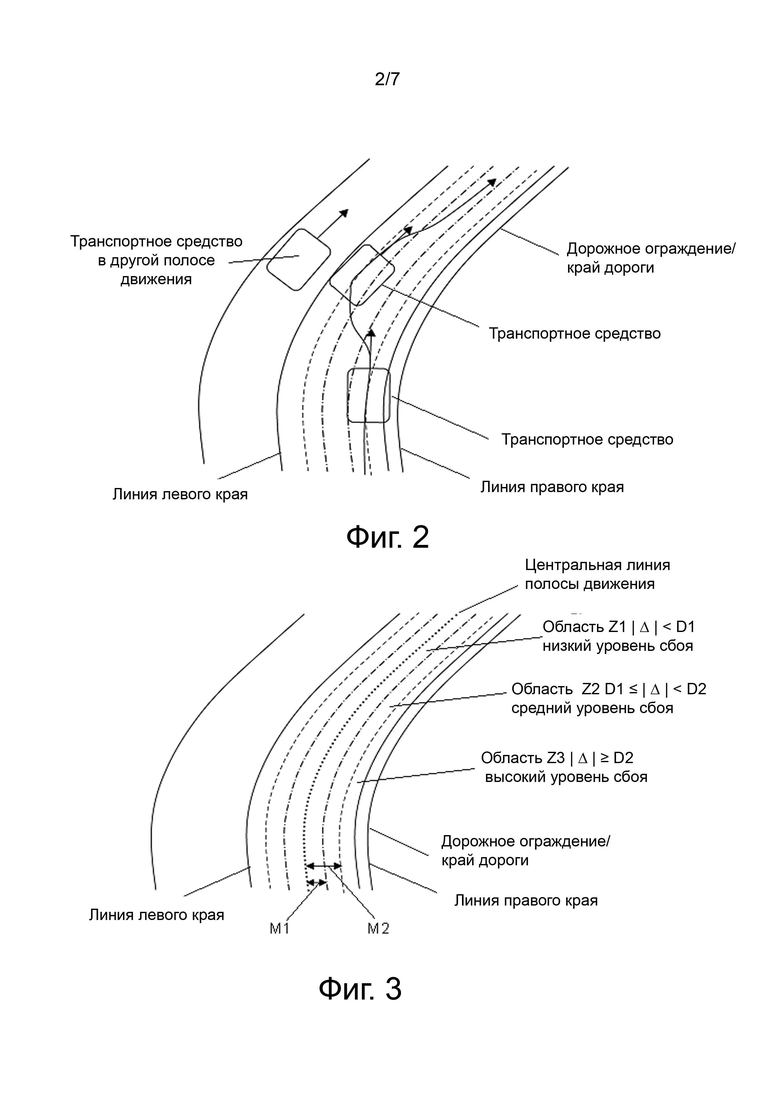
Для транспортных средств с автоматическим управлением среднего уровня в случае, когда сбои, ошибки или нарушения в работе не превышают верхнее предельное значение проектной отказоустойчивости, функция управления избыточностью в настоящем изобретении может поддерживать безопасное движение транспортного средства. Когда уровень сбоя, ошибки или нарушения в работе превышают расчетное верхнее предельное значение отказоустойчивости, кузов транспортного средства может отклониться от линии края полосы движения. В этот момент функция управления избыточностью в настоящем варианте осуществления может увеличить время до столкновения транспортного средства с боковым ограждением, краем дороги или транспортным средством, увеличить продолжительность времени и обеспечить условия водителю взять на себя управление транспортным средством с системой автоматического вождения.
Для транспортных средств с системой автоматического вождения высокого уровня маловероятно, что система безопасности будет функционировать непрерывно или будет отключена и, когда сбои, ошибки или нарушения в работе не превышают расчетное верхнее предельное значение отказоустойчивости, функция управления избыточности позволяет в случае возникновения аварийной ситуации удержать транспортное средство в полосе движения и управлять транспортным средством в области безопасности. Когда сбои, ошибки или нарушения превышают расчетное верхнее предельное значение отказоустойчивости, транспортное средство удерживается в области безопасности с помощью функции управления избыточностью по настоящему изобретению или находится в благоприятном положении в соответствии с установленными нормами (т.е. транспортное средство произвольно не изменяет траекторию движения и не сталкивается с другими транспортными средствами, находящимися в полосе движения, и в то же время транспортное средство выполняет замедление для предотвращения столкновения с объектом, находящимся впереди).
Краткое описание чертежей
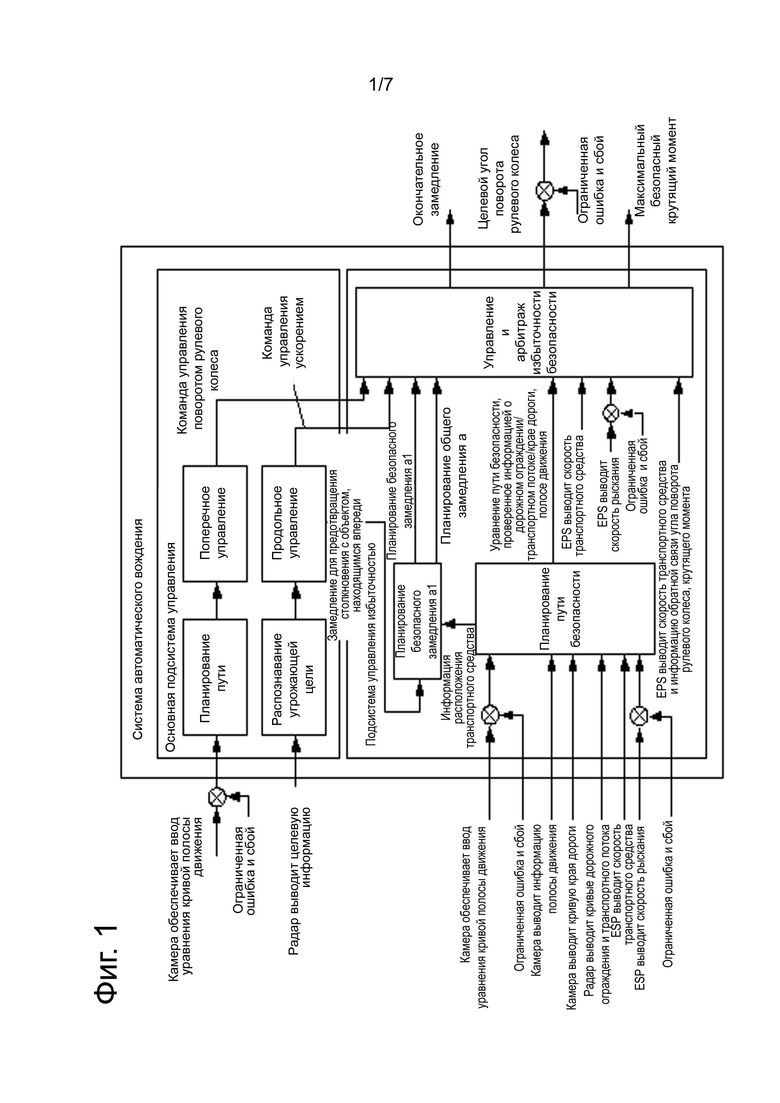
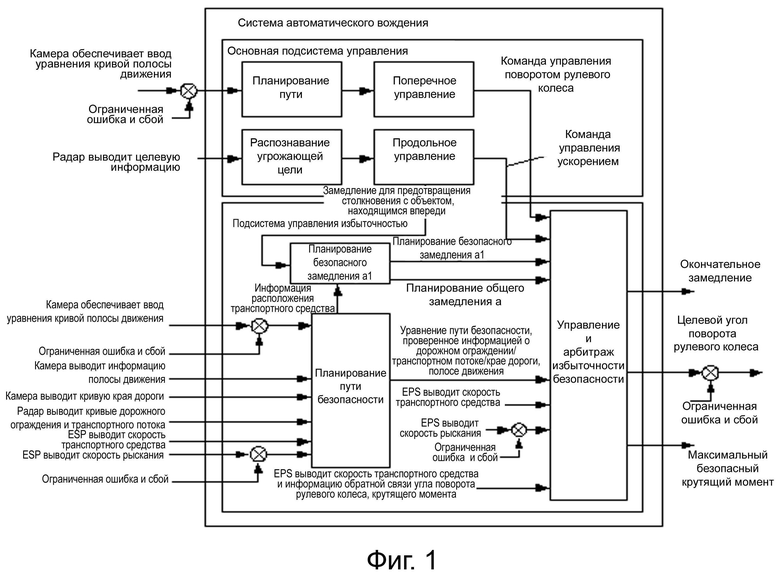
Фиг.1 является схемой системы автоматического вождения согласно варианту осуществления настоящего изобретения.
Фиг.2 является схемой эффекта функции управления избыточностью согласно варианту осуществления настоящего изобретения.
Фиг.3 является схемой областей смещения и уровней сбоя согласно варианту осуществления настоящего изобретения.
Фиг.4 является блок-схемой алгоритма способа, применяемого к системе автоматического вождения среднего уровня согласно варианту осуществления настоящего изобретения.
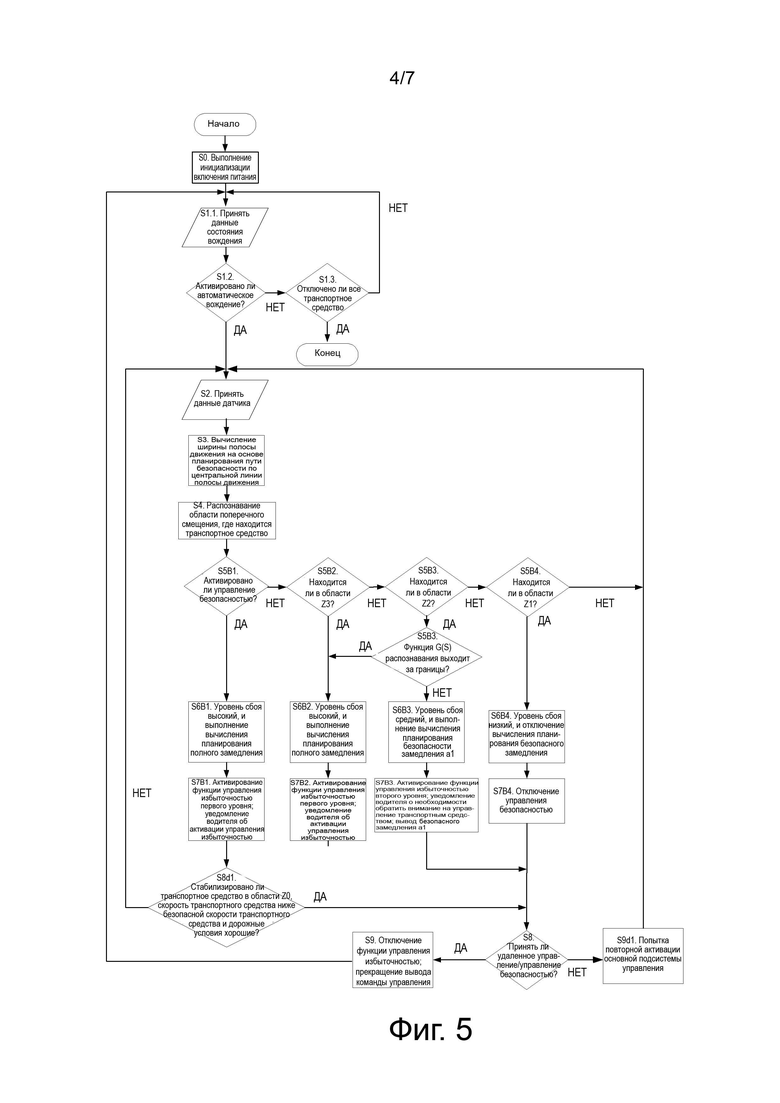
Фиг.5 является блок-схема алгоритма способа, применяемого к высокоуровневой системе автоматического вождения согласно варианту осуществления настоящего изобретения.
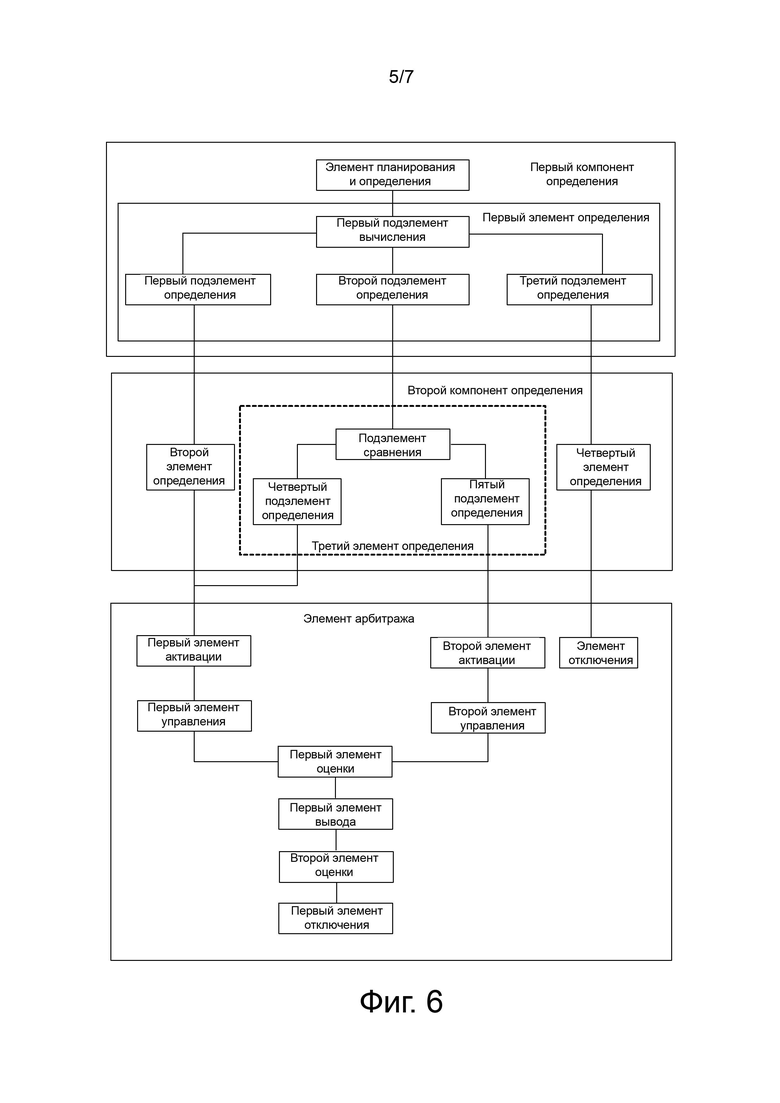
Фиг.6 является схемой подсистемы управления избыточностью системы автоматического вождения среднего уровня в соответствии с вариантом осуществления настоящего изобретения.
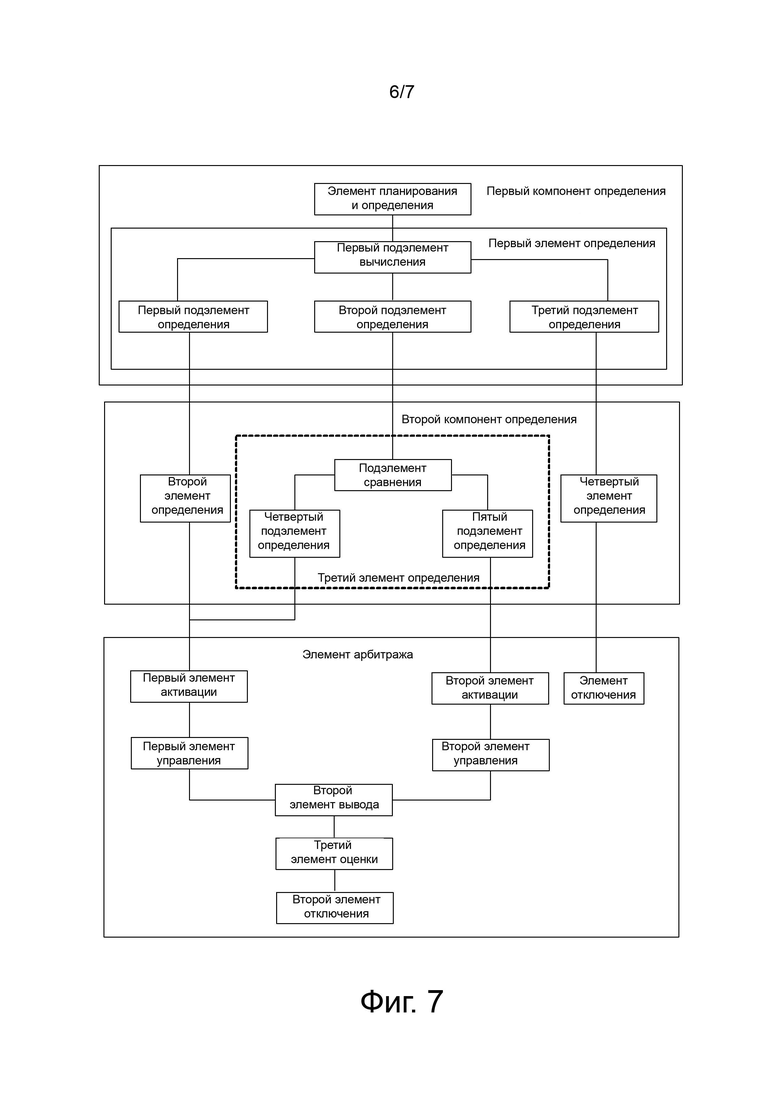
Фиг.7 является схемой подсистемы управления избыточностью высокоуровневой системы автоматического вождения в соответствии с вариантом осуществления настоящего изобретения.
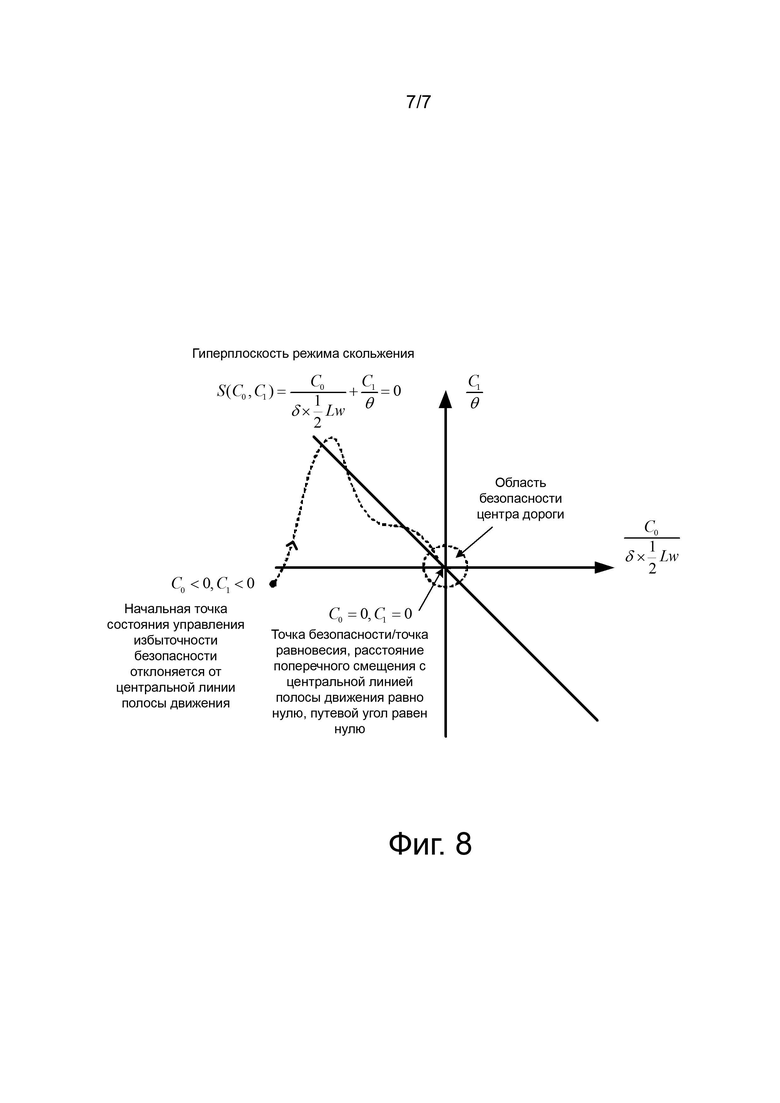
Фиг.8 является схемой фазовой плоскости, гиперплоскости скользящего режима и фазовой траектории способа адаптивного управления скользящим режимом согласно варианту осуществления настоящего изобретения.
Описание вариантов осуществления изобретения
Во-первых, следует отметить, что каждая формула вычисления в вариантах осуществления настоящего изобретения использует центр тяжести транспортного средства в качестве начала координат и направление определяется согласно SAE. В системе координат транспортного средства поперечная ось является ось y (правая сторона положительна) и продольная ось является осью x (передняя сторона положительна). Скорость рыскания по часовой стрелке положительна и угол поворота рулевого колеса положительный влево и отрицательный вправо. Изменение системы координат транспортного средства осуществляется без влияния на физический смысл и реализацию схемы результата расчета настоящего изобретения.
Варианты осуществления настоящего изобретения обеспечивают способ управления избыточностью, применяемый к системе автоматического вождения высокого уровня (уровень 4 или уровень 5) и системе автоматического вождения среднего уровня (уровень 2,5 или уровень 3).
Как для системы автоматического вождения высокого уровня, так и для системы автоматического вождения среднего уровня используются основная подсистема управления и подсистема управления избыточностью, как показано на фиг.1. Когда активирована функция автоматического вождения системы автоматического вождения, основная подсистема управления работает в соответствии с заранее заданной проектной стратегией и, когда основная подсистема управления работает без сбоя, транспортным средством можно управлять для отслеживания полосы движения, удерживая путь/траекторию только используя основную подсистему управления. Когда основная подсистема управления работает ненормально, подсистема управления избыточностью непрерывно выполняет автоматическое управление. В частности, когда подсистема управления избыточностью обнаруживает смещение транспортного средства из-за сбоя, распознанного датчиком и вычислением контроллера основной подсистемы управления, подсистема управления избыточностью может компенсировать неисправность и выработать правильный целевой угол поворота рулевого колеса и замедление в случае сбоя или ошибок основной подсистемы управления для экстренного удержания транспортного средства в полосе движения и выполнения замедления.
Для основной подсистемы управления в настоящем варианте осуществления логика автоматического управления, выполняемая основной подсистемой управления, соответствует уровню техники. Основная подсистема управления используется для приспособления уравнения кривой третьего порядка в соответствии с осевой линией полосы движения в качестве пути движения транспортного средства в соответствии с информацией, распознаваемой основным датчиком (передняя камера, радар и т.п.) для удержания полосы движения, и затем выполнение поперечного управления транспортным средством согласно приспособленной траектории движения транспортного средства, распознавания целевого транспортного средства, угрожающего движению транспортного средства, в соответствии с информацией о целевом транспортном средстве, выводимой установленным радаром транспортного средства, и выполнение продольного управления транспортным средством в соответствии с результатом распознавания. Принцип, согласно которому основная подсистема управления выполняет автоматическое управление движением, который соответствует техническому принципу в соответствующем уровне техники.
В одном варианте осуществления настоящего изобретения предоставляется способ управления избыточностью для системы автоматического вождения среднего или высокого уровня. Способ реализован путем добавления подсистемы управления избыточностью в систему автоматического вождения. Задачи проектирования этого способа заключаются в следующем: по-прежнему управлять транспортным средством для движения в области безопасности (первая область смещения в настоящем варианте осуществления), в то время как датчик неточно обнаруживает кривизну центральной линии полосы движения или, когда часть основной подсистемы управления системы автоматического вождения имеет неисправность, и величины сбоя не превышает допустимого отклонения, что в максимальной степени оказывает помощь водителю в управлении транспортным средством; и по-прежнему удерживает транспортное средство в полосе движения, где оно находится в данный момент, и предотвращают столкновение с транспортным средством впереди в неизбежных авариях, чтобы обеспечить транспортное средство в благоприятном расположении в соответствии с законами и правилами. Причины заключаются в следующем: транспортное средство свободно не меняет параметры движения, поэтому транспортное средство не может столкнуться с транспортными средствами на других полосах движения; между тем, поскольку транспортное средство выполнило продольное замедление, можно максимально избежать столкновения с передним объектом.
Способ, обеспечиваемый настоящим вариантом осуществления, применим к функции удержания полосы движения системы автоматического вождения и не подходит для основной подсистемы управления в системы автоматического вождения для инициирования автоматической смены полосы движения из-за действий пользователя и основной подсистемы управления для управления функцией автоматической смены полосы движения. Во время процесса автоматической смены полосы движения транспортного средства функция управления избыточностью этого способа находится в отключенном состоянии.
В варианте осуществления, показанном на фиг.4, способ применяется в транспортном средстве, имеющем систему автоматического вождения среднего уровня (уровень 2,5 или уровень 3). Режим совместного вождения человека и машины используется в системе автоматического вождения среднего уровня, и водитель выступает в качестве основного объекта, отвечающего за безопасность транспортного средства с автоматическим вождением, поэтому в аспекте управления избыточностью должно рассматриваться предпочтительно управление транспортного средства водителем (т.е. в процессе выполнения управления избыточностью водителю необходимо напрямую напоминать о приеме управления транспортным средством).
Как показано в комбинации на фиг.1 и фиг.4, способ, применяемый к системе автоматического вождения среднего уровня в настоящем варианте осуществления, конкретно выполняет следующие этапы.
На этапе S0 выполняется инициализация включения и процесс переходит к этапу S1.
На этапе S1 подсистема управления избыточностью принимает сигнал состояния системы автоматического вождения и определяет, активирована ли функция автоматического управления системы автоматического вождения. В частности, этап S1 включает в себя следующие этапы.
На этапе S1.1 подсистема управления избыточностью принимает сигнал рабочего состояния системы автоматического вождения.
На этапе S1.2 подсистема управления избыточностью определяет, активирована ли функция автоматического управления системы автоматического вождения. Когда функция автоматического вождения системы автоматической движения активирована, процесс переходит к этапу S2, и когда функция автоматического вождения системы автоматического вождения не активирована, процесс переходит к этапу S1.3.
На этапе S1.3 определяется, отключено ли питание всего транспортного средства, когда все транспортное средство отключено, программа завершена, все транспортное средство не отключено, этап S1 выполняется циклически.
На этапе S2 подсистема управления избыточностью принимает информацию из нескольких источников (в основном, включающую в себя уравнение кривой линии полосы движения, уравнение кривой края дороги, кривой дорожного ограждения и кривой транспортного потока), выводимую каждым входным датчиком (передняя камера, радар и т.п.) системы автоматического вождения, и затем процесс переходит к этапу S3. Некоторые предварительные этапы обработки выполняются для информации, собираемой каждым датчиком, как обычный способ в предшествующем уровне техники. Эти способы обработки также требуются в первом варианте осуществления и не будут описываться подробно.
На этапе S3 выполняются S3.1 и S3.2, и после завершения процесс переходит к этапу S4.
На этапе S3.1 уравнение кривой левого края и уравнение кривой правого края полосы движения, на которой в данный момент времени находится транспортное средство, вычисляются с помощью информации из нескольких источников, выводимой передней камерой и радаром, то есть, уравнением кривой линии полосы движения, уравнением кривой края дороги, уравнением кривой дорожного ограждения и уравнением кривой транспортного потока. Этот этап включает в себя следующие операции.
 точки продольной позиции выбираются в соответствии со скоростью транспортного средства и установленной длительностью временного интервала транспортного средства. Посредством формулы:
точки продольной позиции выбираются в соответствии со скоростью транспортного средства и установленной длительностью временного интервала транспортного средства. Посредством формулы:
вычисляется продольное расстояние между i-й точкой продольной позиции и началом координат системы координат транспортного средства, где является скоростью транспортного средства и является установленной продолжительностью временного интервала ( является константой).
В соответствии с уравнением кривой линии полосы движения, уравнением кривой края дороги, уравнением кривой дорожного ограждения и уравнением кривой транспортного потока, которые распознаются передней камерой и радаром, по формуле:
, определяется левая точка горизонтальной позиции, соответствующая i-й точке продольной позиции.
Посредством формулы:
, определяется правая точка горизонтальной позиции, соответствующая i-й точке продольной позиции.
Полученные N точки позиции левого края полосы движения, где в данный момент времени находится транспортное средство, вписываются в кривую левого края полосы, на которой в данный момент времени находится транспортное средство, с использованием выравнивания по способу наименьших квадратов, который представляет собой существующую технологию численных вычислений.
Полученные N точки позиции правого края полосы движения, где в данный момент времени находится транспортное средство, вписываются в кривую правого края полосы, на которой в данный момент времени находится транспортное средство, с использованием выравнивания по способу наименьших квадратов, который является существующей технологией численных вычислений.
Коэффициенты кривой левого края и кривой правого края усредняются по формуле:
получено уравнение безопасного пути для движения транспортного средства по средней линии полосы движения.
является расстоянием поперечного смещения центральной линии полосы движения полосы, где в данный момент времени находится транспортное средство, относительно начала системы координат транспортного средства,  является углом (т.е. путевым углом транспортного средства) на центральной линии полосы движения полосы движения, где транспортное средство в данный момент времени расположено, относительно начала системы координат транспортного средства,
является углом (т.е. путевым углом транспортного средства) на центральной линии полосы движения полосы движения, где транспортное средство в данный момент времени расположено, относительно начала системы координат транспортного средства,  является кривизной центральной линии полосы движения,
является кривизной центральной линии полосы движения,  является скоростью изменения кривизны центральной линии полосы движения и
является скоростью изменения кривизны центральной линии полосы движения и  является продольной координатой прямоугольной системы координат транспортного средства с центром тяжести транспортное средство как начало координат.
является продольной координатой прямоугольной системы координат транспортного средства с центром тяжести транспортное средство как начало координат.
На этапе S3.2 вычисляется ширина полосы движения, на которой в данный момент времени находится транспортное средство, с помощью кривых левого и правого краев дороги и исторической ширины полосы движения и, в частности,  ширин дороги рассчитывается по первым точкам кривой края.
ширин дороги рассчитывается по первым точкам кривой края.

Ширина дороги получается путем использования минимального значения общей  ширин полосы движения ширины дороги в первых
ширин полосы движения ширины дороги в первых  точках позиции и исторической минимальной ширины полосы движения за прошлый период времени ( является заданной постоянной времени):
точках позиции и исторической минимальной ширины полосы движения за прошлый период времени ( является заданной постоянной времени):
На этапе S4 область смещения, где в данный момент времени находится транспортное средство, распознается в соответствии с коэффициентом и шириной  полосы движения в уравнении
полосы движения в уравнении  запланированного пути безопасности. Этот этап специально разделен на этап S4.1 и этап S4.2.
запланированного пути безопасности. Этот этап специально разделен на этап S4.1 и этап S4.2.
На этапе S4.1 каждое расстояние смещения делится в соответствии с шириной  полосы движения и заданным процентным соотношением каждой области смещения к ширине полосы движения. Как показано на фиг.2 и фиг.3, в настоящем примере первая область смещения относится к области, сформированной расстоянием между левым и правым направлениями и центральной линией полосы движения, которые меньше или равным M1. Вторая область
полосы движения и заданным процентным соотношением каждой области смещения к ширине полосы движения. Как показано на фиг.2 и фиг.3, в настоящем примере первая область смещения относится к области, сформированной расстоянием между левым и правым направлениями и центральной линией полосы движения, которые меньше или равным M1. Вторая область  смещения относится к области, сформированной расстоянием между левым и правым направлениями и центральной линией полосы движения, которая меньше или равно M2 и больше M1. Третья область
смещения относится к области, сформированной расстоянием между левым и правым направлениями и центральной линией полосы движения, которая меньше или равно M2 и больше M1. Третья область  смещения относится к области, сформированной расстоянием между левым и правым направлениями и центральной линией полосы движения, которые больше M2 и меньше или равны области, сформированной
смещения относится к области, сформированной расстоянием между левым и правым направлениями и центральной линией полосы движения, которые больше M2 и меньше или равны области, сформированной  .
.
На этапе S4.2 функция сбоя в зависимости от ширины полосы движения и расстояния поперечного смещения вычисляется следующим образом:
 ,
,
где является шириной полосы движения и является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства.
На этапе S4.2 область смещения, где находится транспортное средство, распознается в соответствии с функцией распознавания.
1) Транспортное средство, находящееся в первой области смещения (см. фиг.3), должно соответствовать:
D1 является первым заданным отношением, а именно, процентное значение, которое составляет (заданное максимальное поперечное отклонение M1 для удержания транспортного средства, движущегося по центральной линии полосы движения/0,5 ширины полосы движения) × 100%.
2) Транспортное средство, расположенное во второй области смещения (см. фиг.3), должно соответствовать:

D2 является вторым заданным отношением, а именно, процентное значение, которое составляет (заданное максимальное поперечное отклонение M2 для удержания транспортного средства, движущегося по любой из боковой полосе движения, дорожного ограждения и дороги вдоль поперечного безопасного расстояния/0,5 раз ширины полосы движения) × 100%.
3) Транспортное средство, находящееся в третьей области смещения (см. фиг. 3), должно соответствовать:
На этапе S5 текущий уровень сбоя основной подсистемы управления определяется в соответствии с областями , , смещения, где в данный момент времени находится транспортное средство, и результатом управления, выводимым подсистемой управления избыточностью в предшествующем цикле управления (в частности, активирует ли подсистема управления избыточностью функцию управления избыточностью первого уровня в предшествующем цикле управления). Этап S5 включает в себя подэтапы с S5B1 по S5B4.
На этапе S5B1 подсистема управления избыточностью определяет, активировать ли функцию управления избыточностью первого уровня в предшествующем цикле управления, при определении активации функции управления избыточностью первого уровня в предшествующем цикле управления, уровень сбоя основной подсистемы управления определяется как высокий уровень сбоя, и процесс переходит к S6B1.
На этапе S5B2, когда подсистема управления избыточностью определяет, что функция управления избыточностью первого уровня не активирована в предшествующем цикле управления, но транспортное средство в данный момент времени находится в третьей области смещения, уровень сбоя основной подсистемы управления также определяется как высокий уровень сбоя, и процесс переходит к S6B2.
На этапе S5B3, когда подсистема управления избыточностью определяет, что функция управления избыточностью первого уровня не активирована в предшествующем цикле управления, но транспортное средство в данный момент времени находится во второй области смещения, первая функция распознавания расположения транспортного средства должна быть дополнительно рассчитана посредством формулы:
 ,
,
вычисляется первая функция распознавания. является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства. является углом между центральной линией полосы движения и транспортным средством (т.е. путевым углом). является коэффициент безопасности расстояния поперечного смещения. В частности, является коэффициентом безопасности расстояния поперечного смещения, обычно равным половине ширины полосы движения, . Когда единообразие изготовления всего транспортного средства и системы рулевого управления оставляет желать лучшего,  следует должным образом снизить. представляет собой безопасный путевой угол, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения. Безопасный путевой угол рассчитывается по формуле:
следует должным образом снизить. представляет собой безопасный путевой угол, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения. Безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым системой обнаружения транспортного средства.
является показателем достоверности распознавания. В нормальных условиях без автоматического вождения поддержка больших объемов данных, является постоянной,  . При наличии поддержки больших объемов данных точность распознавания может быть повышена за счет операций и пользовательских данных. В частности, функция, относящаяся к параметру
. При наличии поддержки больших объемов данных точность распознавания может быть повышена за счет операций и пользовательских данных. В частности, функция, относящаяся к параметру  , получается путем подбора нейронной сети RBF в соответствии со скоростью транспортного средства (выводимая ESP транспортного средства), скоростью рыскания транспортного средства (выводимой ESP транспортного средства), угла поворота рулевого управления, кривизной центральной линии полосы движения и соответствующего коэффициента сцепления с дорожным покрытием, определенный в соответствии с типом дорожного покрытия, распознаваемым передней камерой (система предварительно устанавливает соответствующее соотношение между различными типами дорожного покрытия и коэффициентами сцепления с дорожным покрытием):
, получается путем подбора нейронной сети RBF в соответствии со скоростью транспортного средства (выводимая ESP транспортного средства), скоростью рыскания транспортного средства (выводимой ESP транспортного средства), угла поворота рулевого управления, кривизной центральной линии полосы движения и соответствующего коэффициента сцепления с дорожным покрытием, определенный в соответствии с типом дорожного покрытия, распознаваемым передней камерой (система предварительно устанавливает соответствующее соотношение между различными типами дорожного покрытия и коэффициентами сцепления с дорожным покрытием):

Для обеспечения приспособления системы безопасности в первом варианте осуществления для  определен диапазон
определен диапазон  .
.
В случае удовлетворения первой функции распознавания расположения транспортного средства условию  , уровень сбоя основной подсистемы управления определяется как высокий уровень сбоя, и процесс переходит к этапу S6B2. Когда первая функция распознавания расположения транспортного средства не удовлетворяет условию , уровень сбоя основной подсистемы управления определяется как средний уровень сбоя и процесс переходит к этапу S6B3.
, уровень сбоя основной подсистемы управления определяется как высокий уровень сбоя, и процесс переходит к этапу S6B2. Когда первая функция распознавания расположения транспортного средства не удовлетворяет условию , уровень сбоя основной подсистемы управления определяется как средний уровень сбоя и процесс переходит к этапу S6B3.
На этапе S5B4, когда подсистема управления избыточностью определяет, что функция управления избыточностью не активирована в предшествующем цикле управления, но транспортное средство в данный момент времени находится в первой области смещения, уровень сбоя основной подсистемы управления определяется как низкий уровень сбоя и процесс переходит к S6B4.
На этапе S6 выборочно выполняются подэтапы S5B1-S5B4 в соответствии с этапом S5 выполняются соответственно соответствующие подэтапы S6B1-S6B4 и затем после завершения выполняются соответственно соответствующие подэтапы S7B1-S7B4.
На этапе S6B1, когда уровень сбоя основной подсистемы управления определяется как высокий уровень сбоя на подэтапе S6B1, подсистема управления избыточностью активирует функцию управления избыточностью первого уровня. Активация функции управления избыточностью первого уровня указывает на то, что необходимо рассчитать следующие параметры: 1) полное замедление , необходимое для ESP для выполнения продольного управления; 2) максимальный безопасный крутящий момент , целевой угол поворота рулевого колеса и гибкое время управления, которые позволяют ESP выполнять поперечное управление. После того как информация о параметрах вычислена, процесс переходит к этапу S7B1.
В настоящем варианте осуществления конкретный способ вычисления вычисленного полного замедления , который позволяет ESP выполнять управление в продольном направлении, следующий.
1) В соответствии с первой функцией распознавания расположения транспортного средства безопасное замедление рассчитывается по следующей формуле:
где является ускорение свободного падения. является коэффициентом сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемое передней камерой. , что является максимально безопасным замедлением транспортного средства.  , который представляет собой минимальное безопасное замедление транспортного средства.
, который представляет собой минимальное безопасное замедление транспортного средства.
является коэффициентом замедления, определяемым в зависимости от управляемости и устойчивости шасси транспортного средства, рассчитываемым по формуле:  . является скоростью миграции критической нагрузки с точки зрения безопасности ( является константой). является средней скоростью миграции нагрузки: , является текущим моментом времени, является моментом времени определения, является протектором транспортного средства и является высотой центра масс транспортного средства.
. является скоростью миграции критической нагрузки с точки зрения безопасности ( является константой). является средней скоростью миграции нагрузки: , является текущим моментом времени, является моментом времени определения, является протектором транспортного средства и является высотой центра масс транспортного средства.
является количественным интегральным параметром оценки сбоя, рассчитываемый по формуле:  . является приращением критического для безопасности путевого угла ( является постоянным). является моментом времени, когда транспортное средство въезжает во вторую область смещения из первой области смещения; является текущим моментом времени; является скоростью рыскания транспортного средства; является скоростью транспортного средства.
. является приращением критического для безопасности путевого угла ( является постоянным). является моментом времени, когда транспортное средство въезжает во вторую область смещения из первой области смещения; является текущим моментом времени; является скоростью рыскания транспортного средства; является скоростью транспортного средства.
S является переменной скользящего режима, рассчитываемой по формуле: . является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является путевым углом транспортного средства; является кривизной центральной линии полосы движения; является шириной полосы движения, где в данный момент находится транспортное средство; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; является безопасный путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности для обеспечения постепенного приближения транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым системой обнаружения транспортного средства.
2) Получают замедление  , вырабатываемое основной подсистемой управления в текущем цикле управления. Замедление используется для предотвращения столкновения с передним транспортным средством. Способ вычисления замедления
, вырабатываемое основной подсистемой управления в текущем цикле управления. Замедление используется для предотвращения столкновения с передним транспортным средством. Способ вычисления замедления  основной подсистемой управления предшествующего уровня техники.
основной подсистемой управления предшествующего уровня техники.
3) Рассчитывается полное замедление  , учитывая одно из замедлений
, учитывая одно из замедлений  и
и  с большим абсолютным значением, и полное замедление
с большим абсолютным значением, и полное замедление  не превышает максимальных возможностей системы. Полное торможение удовлетворяет:
не превышает максимальных возможностей системы. Полное торможение удовлетворяет:
Дополнительно, в первом варианте осуществления конкретный способ вычисления целевого угла поворота рулевого колеса, необходимого для EPS для выполнения горизонтального управления, выглядит следующим образом:

 . является шириной полосы движения, на которой в данный момент находится транспортное средство, является скоростью транспортного средства, является коэффициентом безопасности транспортного средства на расстояние поперечного смещения, является безопасным путевым углом, при котором транспортное средство возвращается в область Z0 рядом с центральной линией полосы движения, когда транспортное средство съезжает с центральной линии полосы движения, является передаточным отношением системы рулевого управления транспортного средства, является адаптивным параметром, является осью транспортного средства, является начальным значением адаптивного параметра режима скольжения и является константой.
. является шириной полосы движения, на которой в данный момент находится транспортное средство, является скоростью транспортного средства, является коэффициентом безопасности транспортного средства на расстояние поперечного смещения, является безопасным путевым углом, при котором транспортное средство возвращается в область Z0 рядом с центральной линией полосы движения, когда транспортное средство съезжает с центральной линии полосы движения, является передаточным отношением системы рулевого управления транспортного средства, является адаптивным параметром, является осью транспортного средства, является начальным значением адаптивного параметра режима скольжения и является константой.
В настоящем варианте осуществления для вычисления требуемого целевого угла  поворота рулевого колеса принят принцип управления в режиме адаптивного скольжения. Во-первых, определяется функция
поворота рулевого колеса принят принцип управления в режиме адаптивного скольжения. Во-первых, определяется функция  скользящего режима, необходимая для EPS для выполнения поперечного управления, как:
скользящего режима, необходимая для EPS для выполнения поперечного управления, как:
Как показано на фиг.8, гиперплоскость скользящего режима удовлетворяет:
где является шириной полосы движения, на которой в данный момент времени находится транспортное средство, является коэффициентом безопасности расстояния поперечного смещения транспортного средства на и является безопасный путевым углом транспортного средства.
В частности, является коэффициентом безопасности расстояния поперечного смещения, обычно равный половине ширины полосы движения, . Когда единообразие изготовления всего транспортного средства и системы рулевого управления оставляет желать лучшего, следует должным образом снизить. Когда транспортное средство управляется для стабилизации на гиперплоскости скользящего режима после определения конструкции, должно удовлетворять:  . Следовательно,
. Следовательно,  (безопасный путевой угол) определяет путевой угол
(безопасный путевой угол) определяет путевой угол  , когда расстояние
, когда расстояние  поперечного смещения является постоянным. Например, когда расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства составляет
поперечного смещения является постоянным. Например, когда расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства составляет  , путевой угол
, путевой угол  может быть получен путем решения
может быть получен путем решения  .
.
Дополнительно, определяется функция  Ляпунова поперечного управления как:
Ляпунова поперечного управления как:

Согласно теории устойчивости управления скользящим режимом поперечное управление устойчиво, и функция  Ляпунова удовлетворяет:
Ляпунова удовлетворяет:
Дополнительно, принят закон  адаптивного скользящего режима:
адаптивного скользящего режима:
=
Согласно теории управления скользящим режимом, чем  больше, тем выше отказоустойчивость и устойчивость к возмущениям и устойчивость к возмущениям закона относительно адаптивного скользящего режима. Следовательно, способ адаптивного коэффициента для оценки адаптивного параметра
больше, тем выше отказоустойчивость и устойчивость к возмущениям и устойчивость к возмущениям закона относительно адаптивного скользящего режима. Следовательно, способ адаптивного коэффициента для оценки адаптивного параметра  представляет собой:
представляет собой:
Начальное значение адаптивного параметра  в вышеупомянутом адаптивном коэффициенте может принимать действительное число больше нуля, например,
в вышеупомянутом адаптивном коэффициенте может принимать действительное число больше нуля, например,  .
.
является функцией мертвой зоны для мертвой зоны , функция равна нулю, является скоростью рыскания транспортного средства, является коэффициентом безопасности расстояния поперечного смещения транспортного средства, является безопасным путевым углом транспортного средства, является параметром безопасной скорости рыскания ( равен константе), установленная для предотвращения слишком большой относительной скорости рыскания транспортного средства, является параметром адаптивной скорости ( является константой) и является адаптивной верхней границей ( является константой), определяемой сбоем общей отказоустойчивостью конструкции верхней границы любого из датчика, контроллера и исполнительного механизма.
Удовлетворить ,
 =
=
Коэффициент управления скользящим режимом (то есть целевой угол  поворота рулевого колеса в варианте 1 осуществления) получается как:
поворота рулевого колеса в варианте 1 осуществления) получается как:

Дополнительно, в настоящем варианте осуществления формула расчета максимального крутящего момента  безопасности, передаваемого в EPS для управления в продольном направлении, выглядит следующим образом:
безопасности, передаваемого в EPS для управления в продольном направлении, выглядит следующим образом:

 является вторым крутящим моментом, полученным EPS в соответствии с напряжением постоянного тока, максимальным током, температурой двигателя и температурой преобразователя (способ расчета является способом предшествующего уровня техники).
является вторым крутящим моментом, полученным EPS в соответствии с напряжением постоянного тока, максимальным током, температурой двигателя и температурой преобразователя (способ расчета является способом предшествующего уровня техники).  является первым крутящим моментом, рассчитанным с помощью справочной таблицы скорости транспортного средства.
является первым крутящим моментом, рассчитанным с помощью справочной таблицы скорости транспортного средства.
Функция  поиска в таблице получается путем подбора реальных данных испытаний модели транспортного средства, как показано в следующей таблице:
поиска в таблице получается путем подбора реальных данных испытаний модели транспортного средства, как показано в следующей таблице:

Дополнительно, в первом варианте осуществления гибкое время управления получается путем деления поперечной скорости  на поперечное безопасное расстояние (когда
на поперечное безопасное расстояние (когда  поперечное безопасное расстояние равно
поперечное безопасное расстояние равно  ; когда
; когда  поперечное безопасное расстояние равно
поперечное безопасное расстояние равно  ), соответствующего моменту, в который вспомогательный подсистема управления избыточностью активирует функцию управления избыточностью в текущем цикле управления, и это ограничено
), соответствующего моменту, в который вспомогательный подсистема управления избыточностью активирует функцию управления избыточностью в текущем цикле управления, и это ограничено  . Специально рассчитывается по формуле:
. Специально рассчитывается по формуле:
Кроме того, определяется, что EPS выполняет гибкое управление углом поворота рулевого колеса (поперечное управление), чтобы побудить транспортное средство изменить текущее фактическое значение обратной связи угла поворота рулевого колеса на вышеуказанный целевой угол поворота рулевого колеса. В этом процессе различные моменты t интерполяции соответствуют углу поворота колеса интерполяции. В первом варианте осуществления EPS гибко запускает поперечное управление посредством интерполяции сигмовидной функции.
Во время интерполяции формула вычисления угла поворота рулевого колеса интерполяции, соответствующего различным моментам t интерполяции, имеет следующий вид:
Способ вычисления параметра  является способом вычисления целевого угла поворота рулевого колеса в S7B1.2; ; представляет собой разность между фактическим значением обратной связи угла поворота рулевого колеса, соответствующим моменту, когда подсистема управления избыточностью активирует функцию управления избыточностью первого уровня в текущем цикле управления, и целевым углом поворота рулевого колеса.
является способом вычисления целевого угла поворота рулевого колеса в S7B1.2; ; представляет собой разность между фактическим значением обратной связи угла поворота рулевого колеса, соответствующим моменту, когда подсистема управления избыточностью активирует функцию управления избыточностью первого уровня в текущем цикле управления, и целевым углом поворота рулевого колеса.
На этапе S6B2, когда уровень сбоя основной подсистемы управления определяется как высокий уровень сбоя на подэтапе S6B2, подсистема управления избыточностью активирует функцию управления избыточностью первого уровня. Активация функции управления избыточностью означает, что необходимо рассчитать следующие параметры: 1) полное замедление, необходимое для ESP выполнить управление в продольном направлении; 2) максимальный безопасный крутящий момент , целевой угол поворота рулевого колеса и гибкий период времени управления, которые позволяют ESP выполнять поперечное управление. После того, как информация о параметрах вычислена, процесс переходит к этапу S7B2. Способы расчета полного замедления , максимального крутящего момента безопасности, целевого угла поворота рулевого колеса и периода времени гибкого управления такие же, как и на этапе S6B1.
На этапе S6B3, когда уровень сбоя основной подсистемы управления определяется как средний уровень сбоя на подэтапе S6B3, подсистема управления избыточностью активирует функцию управления избыточностью второго уровня. Активация функции управления избыточностью второго уровня означает, что необходимо рассчитать безопасное замедление . Затем процесс переходит к этапу S7B3. Способ расчета безопасного замедления такой же, как и на этапе S6B1.
На этапе S6B4, когда уровень сбоя основной подсистемы управления определяется как низкий уровень сбоя на подэтапе S6B4, подсистема управления избыточностью не активирует функцию управления избыточностью, вычисление безопасного замедления не выполняется, и затем процесс переходит к этапу S7B4.
На этапе S7, выполняются соответственно соответствующие подэтапы S7B1-S7B4, выборочно выполняются подэтапы S6B1-S6B4 согласно этапу S6, и затем после завершения выполняется этап S8.
В настоящем варианте осуществления этап S7B1 включает в себя этапы S7B1.1 и S7B1.2.
На этапе S7B1.1, 1) подсистема управления избыточностью отправляет команду управления продольным движением в ESP, в частности, принимая полное замедление  как окончательную команду управления ускорением, которая, затем выводится в ESP и позволяет ESP выполнять управление в продольном направлении. Операция, выполняемая ESP в продольном направлении, включает в себя: выполнение полного замедления до первой целевой скорости транспортного средства. Разные первые заданные скорости транспортного средства соответствуют различным рабочим условиям вождения. В настоящем варианте осуществления способ определения первой целевой скорости транспортного средства включает в себя: в рабочем состоянии без транспортных пробок, когда скорость переднего транспортного средства больше, чем минимальная безопасная скорость транспортного средства в полосе движения, где транспортное средство в данный момент времени находится, которая разрешена правилами дорожного движения, выполнение полного замедления до минимальной безопасной скорости транспортного средства, обеспечиваемой полосой движения, на которой в данный момент находится транспортное средство (в этот момент минимальная безопасная скорость транспортного средства является первой целевой скоростью транспортного средства); в рабочем состоянии медленного движения транспортного средства выполнение полного замедления до скорости переднего транспортного средства (скорость переднего транспортного средства используется в качестве первой целевой скорости транспортного средства), так что между транспортным средством и передним транспортным средством сохраняется определенное безопасное расстояние в продольном направлении; и в рабочем состоянии транспортной пробки, когда текущая скорость транспортного средства ниже установленной скорости транспортного средства (например, 30 км/ч), выполнение полного замедления до тех пор, пока транспортное средство не остановится (в этот момент первая цель скорость транспортного средства равна 0). 2) Подсистема управления избыточностью отправляет команду поперечного управления в EPS. Команда поперечного управления включает в себя целевой угол поворота рулевого колеса, который необходимо вывести в EPS и который вычисляется в соответствии с принципом управления адаптивным скользящим режимом, и угол поворота рулевого колеса с интерполяцией, соответствующий различным моментам
как окончательную команду управления ускорением, которая, затем выводится в ESP и позволяет ESP выполнять управление в продольном направлении. Операция, выполняемая ESP в продольном направлении, включает в себя: выполнение полного замедления до первой целевой скорости транспортного средства. Разные первые заданные скорости транспортного средства соответствуют различным рабочим условиям вождения. В настоящем варианте осуществления способ определения первой целевой скорости транспортного средства включает в себя: в рабочем состоянии без транспортных пробок, когда скорость переднего транспортного средства больше, чем минимальная безопасная скорость транспортного средства в полосе движения, где транспортное средство в данный момент времени находится, которая разрешена правилами дорожного движения, выполнение полного замедления до минимальной безопасной скорости транспортного средства, обеспечиваемой полосой движения, на которой в данный момент находится транспортное средство (в этот момент минимальная безопасная скорость транспортного средства является первой целевой скоростью транспортного средства); в рабочем состоянии медленного движения транспортного средства выполнение полного замедления до скорости переднего транспортного средства (скорость переднего транспортного средства используется в качестве первой целевой скорости транспортного средства), так что между транспортным средством и передним транспортным средством сохраняется определенное безопасное расстояние в продольном направлении; и в рабочем состоянии транспортной пробки, когда текущая скорость транспортного средства ниже установленной скорости транспортного средства (например, 30 км/ч), выполнение полного замедления до тех пор, пока транспортное средство не остановится (в этот момент первая цель скорость транспортного средства равна 0). 2) Подсистема управления избыточностью отправляет команду поперечного управления в EPS. Команда поперечного управления включает в себя целевой угол поворота рулевого колеса, который необходимо вывести в EPS и который вычисляется в соответствии с принципом управления адаптивным скользящим режимом, и угол поворота рулевого колеса с интерполяцией, соответствующий различным моментам  интерполяции во время
интерполяции во время  гибкого управления, что позволяет EPS выполнять гибкое управления углом поворота рулевого колеса
гибкого управления, что позволяет EPS выполнять гибкое управления углом поворота рулевого колеса
В S7B1.2 подсистема управления избыточностью отправляет сигнал напоминания, который служит сигналом (ориентированный на автоматическую систему управления среднего уровня) для напоминания водителю об активировании функции управления избыточностью первого уровня.
В S7B2 выполняются S7B2.1 и S7B2.2.
S7B2.1 включает в себя следующие этапы.
1) Команда продольного управления отправляется в ESP, так что ESP выполняет продольное управление, то есть управление замедлением, способом, записанным на этапе S7B1.1.
2) Команда поперечного управления отправляется в EPS, так что EPS выполняет поперечное управление. В частности, команда поперечного управления включает в себя целевой угол поворота рулевого колеса, который должен быть предоставлен в EPS и рассчитанный в соответствии с принципом управления в режиме адаптивного скольжения, и угол поворота рулевого колеса с интерполяцией, соответствующий различным моментам интерполяции в период времени гибкого управления, что позволяет EPS выполнять гибкое управление углом поворота.
В S7B2.2 подсистема управления избыточностью отправляет сигнал напоминания, который служит сигналом (предназначенный для системы автоматического управления среднего уровня) для напоминания водителю об активации функции управления избыточностью первого уровня.
В S7B3 выполняются S7B3.1 и S7B3.2.
В S7B3.1 подсистема управления избыточностью (автоматическое вождение среднего уровня) определяет конечное ускорение, поставляемое в ESP в соответствии с расчетным безопасным ускорением  и замедлением
и замедлением  , выработанным основной подсистемой управления.
, выработанным основной подсистемой управления.
В частности, минимальное значение берется из данных безопасного замедления и замедления  , выработанные основной подсистемой управления, минимальное значение принимается как окончательное замедление, которое, в конечном итоге, выводится в ESP. Вторая целевая скорость, на которой компонент арбитража выполняет управление замедлением равно
, выработанные основной подсистемой управления, минимальное значение принимается как окончательное замедление, которое, в конечном итоге, выводится в ESP. Вторая целевая скорость, на которой компонент арбитража выполняет управление замедлением равно  (
( представляет собой установленный процент), умноженную на целевую скорость, вырабатываемую в данный момент времени основной подсистемой управления.
представляет собой установленный процент), умноженную на целевую скорость, вырабатываемую в данный момент времени основной подсистемой управления.
В S7B3.2 подсистема управления избыточностью выдает сигнал напоминания водителю о необходимости обратить внимание на и контролировать состояние дороги и транспортного средства.
В S7B4 выполняются S7B4.1 и S7B4.2.
В S7B4.1 подсистема управления избыточностью отключает функцию управления избыточностью.
В S7B4.2 подсистема управления избыточностью (автоматическое вождение среднего уровня) выводит сигнал управления основной функцией, управляемой основной подсистемой управления, в основную подсистему управления, так что основная подсистема управления выполняет управление автоматическим вождением транспортного средства в соответствии с заданной стратегией.
На этапе S8 (автоматическое вождение среднего уровня) определяется, берет ли водитель на себя управление транспортным средством.
На этапе S9 (автоматическое вождение среднего уровня), когда водитель не берет на себя управление транспортным средством, подсистема управления избыточностью продолжает выполнять функцию управления избыточностью, пока водитель не возьмёт на себя управление. Когда водитель берет на себя управление транспортным средством, функция управления избыточностью отключается, и любая команда управления перестает выводиться в исполнительный механизм, EPS или ESP.
В соответствии со способом, предусмотренным вариантом осуществления настоящего изобретения, часть функциональных компонентов (компонент приспособления и компонент избыточности) в подсистеме управления избыточностью непрерывно работает вместе с основной подсистемой управления, и часть функциональных компонентов, в основном, используются для распознавания области смещения транспортного средства, в которой находится в данный момент. В настоящем варианте осуществления другая часть функционального компонента (компонент арбитража) в подсистеме управления избыточностью определяет текущий уровень сбоя основной подсистемы управления в соответствии с результатом распознавания компонента и определяет, активизирует ли основная подсистема управления функцию управления избыточностью первого уровня в предшествующем цикле управления, и затем выборочно активирует или деактивирует функцию управления избыточностью. Когда активируется функция управления избыточностью первого уровня, EPS управляет поперечным управлением и ESP управляет продольным управлением. Когда активирована функция управления избыточностью первого уровня, продольное управление осуществляется посредством управления ESP. Таким образом, транспортное средство может продолжать движение в области безопасного движения по полосе движения, когда основная подсистема управления имеет ошибки или сбой.
В части способа планирования пути безопасности, когда планируется уравнение кривой пути безопасности, выполняется проверка информации из нескольких источников о дорожных ограждениях, краях полосы и транспортных потоках и даже, когда возникают ошибки в датчиках и уравнении кривой запланированного пути безопасности, влияние ошибок ограничено максимальной вероятностью.
Часть способа поперечного управления включает в себя, по меньшей мере, четыре ввода расстояния поперечного смещения транспортного средства, путевого угла транспортного средства, кривизны центральной линии полосы движения и ширины дороги, в качестве входной информации, и гиперплоскости режима скольжения, полученной с помощью, по меньшей мере, трех переменных расстояния поперечного смещения, путевого угла транспортного средства и ширины дороги в соответствии с управлением компенсацией и адаптивным управлением в режиме скольжения или квази-скольжения. До тех пор, пока погрешности поперечного отклонения транспортного средства и путевого угла транспортного средства находятся в пределах определенного диапазона, обнаружение кривизны датчика будет неточным или неправильного угла отклонения угла поворота рулевого колеса, вызванное сбоем или ошибками контроллера, исполнительного механизма или связи не превышают верхнего предела проектной отказоустойчивости, способ может полностью компенсировать влияние сбоев или ошибок. Способ также частично компенсирует эффекты отказов или нарушений, когда они превышают верхнюю границу проектной отказоустойчивости.
В соответствии с частью способа продольного управления вычисляется безопасное замедление в соответствии с переменными состояния, такими как путевым углом и расстояние поперечного смещения, совместное управление замедлением выполняется в сочетании с передним опасным объектом, поперечная кинетическая энергия транспортного средства уменьшается за счет использования замедления транспортного средства, уменьшается вероятность бокового скольжения и улучшается поперечная устойчивость транспортного средства. В рабочем состоянии без транспортных пробок, когда впереди отсутствует угрожающий объект, стратегия торможения не применяется в максимально возможной степени, скорость транспортного средства снижается до минимального ограничения скорости полосы движения на шоссе, вероятность столкновения с транспортным средством, находящимся сзади, при выполнении управления безопасности на шоссе, уменьшается, и безопасность может быть значительно повышена.
Как показано на фиг.5, логика выполнения способа в настоящем варианте осуществления соответствует логике выполнения способа, описанной выше на фиг.4. Разница в том, что способ на фиг.5 применяется к системе автоматического вождения высокого уровня (уровень 4 или уровень 5), автоматическая система вождения в этом случае использует полностью автоматический режим движения, определение автоматического движения и основная подсистема управления является основным аспектом безопасности транспортного средства с автоматическим вождением, и безопасность может быть полностью снижена, но не во всем процессе. Следовательно, приоритет отдается управлению избыточностью с точки зрения управления избыточностью, и после того, как управление избыточностью стабилизируется, безопасность может быть гарантирована. S0-S7 являются такими же, как этапы выполнения способа на фиг.4, за исключением того, что этапы S7B1.2, S7B2.2, S7B3.2, S8 и S9 отличаются от соответствующих этапов в варианте 1 осуществления.
Этапы S7B1.2 и S7B2.2 способа управления избыточностью, применяемого к системе автоматического вождения высокого уровня, являются следующим: подсистема управления избыточностью отправляет сигнал для напоминания о безопасности активации функции управления избыточностью первого уровня, и не напоминает, что система безопасности должна взять на себя управление до того, как транспортное средство станет устойчивым, скорость транспортного средства снизится до безопасной скорости транспортного средства и состояние дороги будет хорошим.
На этапе S7B3.2 подсистема управления избыточностью выводит безопасное замедление ; но сигнал напоминания не выводится для напоминания готовности к работе системы безопасности.
На этапе S8, после того как подсистема управления избыточностью активирует первую функцию управления избыточностью, этап S8d1 выполняется после выполнения подсистемой управления избыточностью этапы S7B1 и S7B2.
На этапе S8d1 подсистема управления избыточностью должна сначала определить, находится ли транспортное средство с автоматическим управлением в стабильном и безопасном состоянии, и определение наличия стабильного и безопасного состояния транспортного средства включает в себя: 1) исходная точка системы координат транспортного средства стабильно расположена в первой области Z0 смещения; 2) текущее состояние дороги хорошее; и 3) скорость транспортного средства ниже, чем минимальная безопасная скорость транспортного средства, разрешенная для полосы движения, где транспортное средство в данный момент времени находится. После того, как эти условия выполнены, этап S8 выполняется снова для определения, следует ли перезапустить основную подсистему управления для управления основной функцией или запроса управления безопасностью.
На этапе S9 сначала выполняется S9d1.
На этапе S9d1, когда система безопасности не берет на себя управление транспортным средством или основная подсистема управления не управляет транспортным средством в соответствии с сигналом основной функции управления, отправленным подсистемой управления избыточностью, система безопасности вновь пытается отправить сигнал управления основной функции в основную подсистему управления для запроса основной подсистемы управления активировать управление основной функции. После выполнения этапа S9d1 выполняется этап S9.
На этапе S9, когда система безопасности или дистанционное управление управляют транспортным средством, подсистема управления избыточностью отключает функцию управления избыточностью и прекращает вывод команд управления в EPS и ESP.
В настоящем варианте осуществления целевой угол  поворота рулевого колеса также может быть получен путем решения другим способом. Здесь параметр управления скользящим режимом (то есть формула для решения целевого угла поворота рулевого колеса) равен:
поворота рулевого колеса также может быть получен путем решения другим способом. Здесь параметр управления скользящим режимом (то есть формула для решения целевого угла поворота рулевого колеса) равен:

Функция насыщения: ; функция квази-насыщения является ;  является произвольной непрерывной функцией, удовлетворяющей , , ; является шириной пограничного уровня квази-скользящего режима (постоянная).
является произвольной непрерывной функцией, удовлетворяющей , , ; является шириной пограничного уровня квази-скользящего режима (постоянная).
Как показано на фиг.6 и фиг.7, вариант осуществления настоящего изобретения также обеспечивает систему автоматического вождения. Система автоматического вождения включает в себя основную подсистему управления и подсистему управления избыточностью. Подсистема управления избыточностью включает в себя:
первый компонент определения, выполненный с возможностью определять, когда активирована функция автоматического вождения системы автоматического вождения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, причем область смещения относится к области, в которой абсолютное значение отношения поперечного расстояния к ширине полосы движения полосы, где в данный момент времени находится транспортное средство, находится в пределах конкретного диапазона отношений, и поперечное расстояние относится к расстоянию между линией границы области смещения и центральной линией полосы движения, на которой находится транспортное средство в данный момент времени, вдоль направлении поперечной оси системы координат транспортного средства;
второй компонент определения, выполненный с возможностью определять текущий уровень сбоя основной подсистемы управления в соответствии с областью смещения, где в данный момент времени находится транспортное средство, и результатом управления, выводимого подсистемой управления избыточностью в предшествующем цикле управления; и
компонент арбитража, выполненный с возможностью активировать функцию управления избыточностью, соответствующую текущему уровню сбоя основной подсистемы управления, и управлять транспортным средством в соответствии с функцией управления избыточностью.
В возможном варианте осуществления первый компонент определения включает в себя:
элемент приспособления, выполненный с возможностью приспосабливать уравнение безопасного пути для удержания движения транспортного средства по центральной линии полосы движения в соответствии с информацией из нескольких источников, выводимой передней камерой и радаром, и определять ширину полосы движения, на которой в данный момент времени находится транспортное средство; и
первый элемент определения, выполненный с возможностью определять область смещения в полосе движения, где в данный момент времени находится транспортное средство, в соответствии с коэффициентом уравнения запланированного безопасного пути и шириной полосы движения.
В дополнительном варианте осуществления информация из нескольких источников, выводимая камерой и радаром, включает в себя, по меньшей мере, одно из следующего: уравнение кривой линии полосы движения, уравнение кривой края полосы, уравнение кривой дорожного ограждения и уравнение кривой транспортного потока, которые планируются относительно начало системы координат транспортного средства. Элемент приспособления выполнен с возможностью выбирать точки продольной позиции в соответствии со скоростью транспортного средства и заданной продолжительности временного интервала, и вычислять продольное расстояние между i-й точкой продольной позиции и началом системы координат транспортного средства по формуле: , где является скоростью транспортного средства, является установленной продолжительностью временного интервала;
посредством формулы:
, определить левую точку горизонтальной позиции, соответствующую i-й точке продольной позиции;
посредством формулы:
, определить правую точку горизонтальной позиции, соответствующую i-й точке продольной позиции;
приспособить полученные N точки позиции левого края полосы движения, где в данный момент времени находится транспортное средство, в кривую левого края полосы, на которой в данный момент времени находится транспортное средство, с использованием способа выравнивания по способу наименьших квадратов;
приспособить полученные N точки позиции правого края полосы движения, где в данный момент времени находится транспортное средство, в кривую правого края полосы движения, на которой в данный момент времени находится транспортное средство, с использованием выравнивания по способу наименьших квадратов;
средние коэффициенты кривой левого края и кривой правого края дороги, и по формуле:
, получить уравнение безопасного пути для движения транспортного средства по центральной линии полосы движения;
посредством формулы:
,
вычислить ширину полосы движения, на которой в данный момент времени находится транспортное средство, представляет историческую минимальную ширину полосы движения за прошлый период времени и .
В возможном варианте осуществления первый элемент определения включает в себя:
первый подэлемент вычисления, выполненный с возможностью выполнять вычисления по формуле:
функцию сбоя в соответствии с шириной полосы движения и расстоянием поперечного смещения, является шириной полосы движения полосы, на которой в данный момент времени находится транспортное средство, и коэффициент является расстоянием поперечного смещения центральной линии полосы движения относительно начала координат системы;
первый подэлемент определения, выполненный с возможностью определять, когда функция сбоя меньше, чем первое заданное значение отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве первой области смещения;
второй подэлемент определения, выполненный с возможностью определять, когда функция сбоя больше или равна первому заданному значению отношения и меньше второго заданного значения отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, является второй областью смещения; и
третий подэлемент определения, выполненный с возможностью определять, когда функция сбоя больше или равна второму установленному значению отношения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве третьей области смещения.
В возможном варианте осуществления второй компонент определения включает в себя:
второй элемент определения, выполненный с возможностью определять, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью первого уровня или, когда результат управления выводится подсистемой управления избыточностью в предшествующем цикле управления, чтобы активировать функцию управления избыточностью второго уровня или, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен не активировать функцию управления избыточностью, но область смещения в полосе движения, где транспортное средство в данный момент времени находится в третьей области смещения, текущий уровень сбоя основной подсистемы управления как высокий уровень сбоя;
третий элемент определения, включающий в себя: подэлемент сравнения, выполненный с возможностью дополнительно сравнивать, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью второго уровня, или, когда управление результат, выводимый подсистемой управления избыточностью в предшествующем цикле управления, не активировать функцию управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является второй областью смещения, первая функция распознавания расположения транспортного средства сравнивается со вторым установленным отношением ; четвертый подэлемент определения, выполненный с возможностью определять, когда первая функция распознавания расположения транспортного средства больше или равна второму установленному отношению , текущий уровень сбоя основной подсистемы управления как высокий уровень сбоя; и пятый подэлемент определения, выполненный с возможностью определять, когда первая функция распознавания расположения транспортного средства меньше, чем второе заданное отношение , текущий уровень сбоя основной подсистемы управления как средний уровень сбоя; и
четвертый элемент определения, выполненный с возможностью определять, когда результат управления, выводимый подсистемой управления избыточностью в предшествующем цикле управления, должен активировать функцию управления избыточностью второго уровня или, когда результат управления выводится подсистемой управления избыточностью в предшествующем цикле управления не нужно активировать функцию управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является первой областью смещения, текущий уровень сбоя основной подсистемы управления является низким уровнем сбоя.
В возможном варианте подэлемент сравнения выполнен с возможностью:
рассчитать по формуле:
,
первую функцию распознавания расположения транспортного средства, где является степенью достоверности распознавания, является постоянной величиной или получена путем подбора нейронной сети RBF в соответствии со скоростью транспортного средства, скоростью рыскания транспортного средства, углом поворота рулевого колеса, кривизной центральной линии полосы движения и коэффициент сцепления с поверхностью дороги, соответствующий типу поверхности дороги полосы, на которой в данный момент времени находится транспортное средство, распознаваемое передней камерой; когда является константой, ; когда получена путем подбора нейронной сети RBF, диапазон значений составляет: ;
S является переменной скользящего режима, рассчитываемой по формуле:
,
уравнение гиперплоскости скользящего режима удовлетворяет: ;
является шириной полосы движения, на которой в данный момент находится транспортное средство; является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является путевым углом транспортного средства; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
,
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым передней камерой.
В возможном варианте реализации арбитражный компонент включает в себя:
первый элемент активации, выполненный с возможностью активировать, когда текущий уровень сбоя основной подсистемы управления является высоким уровнем сбоя, функцию управления избыточностью первого уровня;
второй элемент активации, выполненный с возможностью активировать, когда текущий уровень сбоя основной подсистемы управления является средним уровнем сбоя, функцию управления избыточностью второго уровня; и
элемент отключения, выполненный с возможностью деактивировать, когда текущий уровень сбоя основной подсистемы управления является низким уровнем сбоя, функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня.
В возможном варианте осуществления компонент арбитража дополнительно включает в себя:
первый элемент управления, выполненный с возможностью управлять, когда активирована функция управления избыточностью первого уровня, ESP для замедления до первого целевого замедления в соответствии с рассчитанным полным замедлением и управлять EPS для управления углом поворота рулевого колеса в период времени гибкого управления в соответствии с расчетным целевым углом поворота рулевого колеса и максимальным крутящим моментом безопасности; и
второй элемент управления, выполненный с возможностью управлять, когда активирована функция управления избыточностью второго уровня, ESP для замедления до второго целевого замедления в соответствии с безопасным замедлением , вычисленным второй функцией распознавания расположения транспортного средства и замедления , выработанной основной подсистемой управления.
Полное замедление является большим значением безопасного замедления , вычисленное в соответствии со второй функцией распознавания расположения транспортного средства и замедления ,выводимым основной подсистемы управления; первая целевая скорость связана с текущими рабочими условиями вождения; вторая целевая скорость связана с целевой скоростью, выдаваемой основной подсистемой управления, и вторая целевая скорость меньше целевой скорости, выдаваемой основной подсистемой управления.
В возможном варианте осуществления первый элемент управления выполнен с возможностью:
рассчитать по формуле:
целевой угол поворота рулевого колеса, где является кривизной центральной линии полосы движения; является путевым углом транспортного средства; является шириной полосы движения, где в данный момент находится транспортное средство; является передаточным числом системы рулевого управления транспортного средства; является адаптивным параметром; является осью транспортного средства; являются скоростью транспортного средства; является начальным значением адаптивного параметра, является константой; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; S является переменной скользящего режима, рассчитываемая по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет: ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым системой обнаружения транспортного средства;
адаптивный параметр рассчитывается по формуле:
;
является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является функция мертвой зоны для мертвой зоны и функция равна нулю; является скоростью рыскания транспортного средства; является коэффициентом безопасности расстояния поперечного смещения, равным половине ширины полосы движения, ; является параметром безопасной скорости рыскания, установленный для предотвращения слишком большой относительной скорости рыскания транспортного средства, является параметром адаптивной скорости и является адаптивной верхней границей.
В возможном варианте осуществления первый элемент управления выполнен с возможностью рассчитать по формуле:
,
целевой угол поворота рулевого колеса, где является кривизной центральной линии полосы движения; является путевым углом транспортного средства; является шириной полосы движения, на которой в данный момент находится транспортное средство; является передаточным числом системы рулевого управления транспортного средства; является адаптивным параметром; является осью транспортного средства; является скоростью транспортного средства; является начальным значением адаптивного параметра и является константой; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; S является переменной скользящего режима, вычисляемая по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет: ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
,
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым передней камерой;
адаптивный параметр рассчитывается по формуле:
;
является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является функцией мертвой зоны для мертвой зоны и функция равна нулю; является скоростью рыскания транспортного средства; является коэффициентом безопасности расстояния поперечного смещения, равным половине ширины полосы движения, ; представляет собой набор параметров безопасной скорости рыскания для предотвращения слишком большой относительной скорости рыскания транспортного средства, является параметром адаптивной скорости и является адаптивной верхней границей;
функция насыщения: , функция квази-насыщения: ; является произвольной непрерывной функцией, удовлетворяющая , , ; является шириной пограничного уровня квази-скользящего режима и является постоянной величиной.
В возможном варианте осуществления первый элемент управления и второй элемент управления выполнены с возможностью:
вычислять по формуле:
безопасное замедление,
где является ускорением свободного падения; является коэффициентом сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемое передней камерой; является максимально безопасным замедлением транспортного средства, ; является минимальным безопасным замедлением транспортного средства и является постоянной величиной; является моментом времени, когда транспортное средство въезжает во вторую область смещения из первой области смещения; является текущим моментом времени; является скоростью рыскания транспортного средства; является скоростью транспортного средства;
является коэффициентом замедления, определяемый в зависимости от управляемости и устойчивости шасси транспортного средства, рассчитываемый по формуле: ; является скоростью миграции критической нагрузки с точки зрения безопасности, и является постоянной величиной; является средней скоростью миграции нагрузки, вычисляемая по формуле: , является текущим моментом времени, является моментом времени определения, является протектором транспортного средства и является высотой центра масс транспортного средства;
является количественным интегральным параметром оценки сбоя, рассчитываемый по формуле: , является приращением критического для безопасности путевого угла, и является константой;
S является переменной скользящего режима, рассчитываемой по формуле: ; является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является путевым углом транспортного средства; является кривизной центральной линии полосы движения; является шириной полосы движения, на которой в данный момент находится транспортное средство; является коэффициентом безопасности расстояния поперечного смещения, равный половине ширины полосы движения, ; является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где является верхним пределом безопасности, обеспечивающим поступательное приближение транспортного средства к точке равновесия; является безопасным нижним пределом для обеспечения постепенного приближения транспортного средства к точке равновесия; является максимальным безопасным поперечным ускорением транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
,
является протектором транспортного средства, является высотой центра масс транспортного средства, является ускорением свободного падения и является коэффициентом сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемым системой обнаружения транспортного средства.
В возможном варианте осуществления первый элемент управления выполнен с возможностью рассчитать по формуле: максимальный крутящий момент безопасности,
в котором первый крутящий момент получается путем поиска таблицы в соответствии со скоростью транспортного средства для транспортного средства из предварительно установленной таблицы соотношений скорости транспортного средства и первого крутящего момента , и второй крутящий момент выводится EPS посредством формулы:
рассчитывается период гибкого управления и период гибкого управления удовлетворяет: .
В возможном варианте осуществления первый элемент управления выполнен с возможностью:
определять значение команды угла поворота рулевого колеса интерполяции, соответствующее различным моментам интерполяции, посредством интерполяции сигмоидной функции; посредством формулы:
вычислить значение команды угла поворота рулевого колеса для интерполяции и период времени интерполяции, является разницей между фактическим значением обратной связи угла поворота рулевого колеса транспортного средства, соответствующим моменту времени, когда активирована функция управления избыточностью первого уровня и целевым углом поворота рулевого колеса; и
выводить в EPS интерполяционный угол поворота рулевого колеса, соответствующий каждому моменту t интерполяции в течение периода времени гибкого управления, так что EPS регулирует угол поворота рулевого колеса транспортного средства от фактического значения обратной связи угла поворота рулевого колеса до значения команды интерполяционного угла поворота рулевого колеса при условии максимального крутящего момента безопасности.
В возможном варианте осуществления компонент арбитража дополнительно включает в себя:
первый элемент оценки, выполненный с возможностью оценивать, в случае, когда система автоматического вождения является системой автоматического вождения высокого уровня L4 или L5, когда транспортное средство управляется в соответствии с функцией управления избыточностью первого уровня или функцией управления избыточностью второго уровня, выполняются ли следующие требования: область смещения, где в данный момент времени находится транспортное средство, стабилизирована, чтобы быть первой областью смещения, определяется, меньше ли скорость транспортного средства, чем наименьшая предельная скорость транспортного средства на полосе движения, где транспортное средство в данный момент времени находится или нет, и дорожное состояние полосы, где в данный момент времени находится транспортное средство, является хорошим дорожным состоянием;
первый элемент вывода, выполненный с возможностью выводить, когда требования выполнены, оперативную информацию для побуждения безопасности взять под свой контроль транспортное средство;
второй элемент оценки, выполненный с возможностью определять, принимает ли на себя безопасность управление транспортным средством;
первый элемент отключения, выполненный с возможностью отключать, когда безопасность берет на себя транспортное средство, функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня, и прекращать вывод любой команды управления в EPS и ESP;
второй элемент вывода, выполненный с возможностью выводить, в случае, когда система автоматического вождения является системой автоматического вождения среднего уровня L2.5 или L3, когда транспортное средство управляется в соответствии с функцией управления избыточностью первого уровня или функцией управления избыточностью второго уровня, оперативную информацию для побуждения водителя взять на себя управление транспортным средством;
третий элемент оценки, выполненный с возможностью определять, берет ли водитель на себя управление транспортным средством; и
второй элемент отключения, выполненный с возможностью отключать, когда безопасность берет на себя управление транспортным средством, функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня, и прекращение вывода любой команды управления в EPS и ESP.
Как показано на фиг.1, в другом варианте осуществления настоящего изобретения дополнительно предлагается транспортное средство с автоматическим вождением, которое включает в себя вышеупомянутую систему автоматического вождения.
Другой вариант осуществления настоящего изобретения дополнительно предоставляет контроллер, который включает в себя память и процессор. В памяти хранится по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд, причем указанные по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд загружаются и выполняются процессором для реализации вышеуказанного способа управления избыточностью.
Другой вариант осуществления настоящего изобретения дополнительно обеспечивает машиночитаемый носитель данных, на котором хранится, по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд, причем указанные по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд загружаются и выполняются процессором для реализации вышеупомянутого способа управления избыточностью.
1. Способ управления избыточностью для системы автоматического вождения, содержащей основную подсистему управления и подсистему управления избыточностью, применяемый к подсистеме управления избыточностью, характеризующийся тем, что
когда активирована функция автоматического вождения системы автоматического вождения, определяют область смещения в полосе движения, где в данный момент времени находится транспортное средство, при этом областью смещения называется область, в которой абсолютное значение отношения поперечного расстояния к ширине полосы движения, на которой в данный момент времени находится транспортное средство, находится в пределах конкретного диапазона отношений, причем указанное поперечное расстояние относится к расстоянию между линией границы указанной области смещения и центральной линией полосы движения, где транспортное средство в данный момент времени находится, вдоль направления поперечной оси системы координат транспортного средства;
определяют текущий уровень сбоя основной подсистемы управления в соответствии с указанной областью смещения, где в данный момент времени находится транспортное средство, и результатом управления, выводимым подсистемой управления избыточностью в предшествующем цикле управления; и
активируют функцию управления избыточностью, соответствующую текущему уровню сбоя основной подсистемы управления, и управляют транспортным средством в соответствии с указанной функцией управления избыточностью.
2. Способ по п.1, в котором указанное определение области смещения в полосе движения, где в данный момент времени находится транспортное средство, включает в себя:
подбор уравнения  безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения в соответствии с информацией из нескольких источников, выводимой передней камерой и радаром, и определение ширины
безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения в соответствии с информацией из нескольких источников, выводимой передней камерой и радаром, и определение ширины  полосы движения, на которой в данный момент времени находится транспортное средство; и
полосы движения, на которой в данный момент времени находится транспортное средство; и
определение области смещения в полосе движения, где в данный момент времени находится транспортное средство, в соответствии с коэффициентом  уравнения запланированного безопасного пути и шириной полосы движения.
уравнения запланированного безопасного пути и шириной полосы движения.
3. Способ по п.2, в котором указанная информация из нескольких источников, выводимая камерой и радаром, содержит по меньшей мере один из следующих видов информации: уравнение  кривой полосы движения, уравнение
кривой полосы движения, уравнение  кривой края дороги, уравнение
кривой края дороги, уравнение  кривой дорожного ограждения и уравнение
кривой дорожного ограждения и уравнение  кривой транспортного потока, которые построены относительно начала системы координат транспортного средства; указанный подбор уравнения безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения в соответствии с информацией из нескольких источников, выводимой передней камерой и радаром, и определение ширины полосы движения, на которой в данный момент времени находится транспортное средство, включает в себя:
кривой транспортного потока, которые построены относительно начала системы координат транспортного средства; указанный подбор уравнения безопасного пути для удержания движения транспортного средства вдоль центральной линии полосы движения в соответствии с информацией из нескольких источников, выводимой передней камерой и радаром, и определение ширины полосы движения, на которой в данный момент времени находится транспортное средство, включает в себя:
выбор  точек продольной позиции в соответствии со скоростью транспортного средства и заданной продолжительностью временного интервала и вычисление продольного расстояния
точек продольной позиции в соответствии со скоростью транспортного средства и заданной продолжительностью временного интервала и вычисление продольного расстояния  между i-й точкой продольной позиции и началом системы координат транспортного средства по формуле:
между i-й точкой продольной позиции и началом системы координат транспортного средства по формуле:  , где ν - скорость транспортного средства, и
, где ν - скорость транспортного средства, и  - установленная продолжительность временного интервала;
- установленная продолжительность временного интервала;
посредством формулы:
 ,
,
определение левой точки  горизонтальной позиции, соответствующей i-й точке продольной позиции;
горизонтальной позиции, соответствующей i-й точке продольной позиции;
посредством формулы:
 ,
,
определение правой точки горизонтальной позиции, соответствующей i-й точке продольной позиции;
подбор полученных N точек  позиции левого края полосы движения, где транспортное средство в данный момент времени находится, в кривую
позиции левого края полосы движения, где транспортное средство в данный момент времени находится, в кривую  левого края полосы, где транспортное средство в данный момент времени находится, с использованием метода наименьших квадратов для подбора кривой;
левого края полосы, где транспортное средство в данный момент времени находится, с использованием метода наименьших квадратов для подбора кривой;
подбор полученных N точек  позиции правого края полосы движения, где транспортное средство в данный момент времени находится, в кривую
позиции правого края полосы движения, где транспортное средство в данный момент времени находится, в кривую  правого края полосы движения, где транспортное средство в данный момент времени находится, с использованием метода наименьших квадратов для подбора кривой;
правого края полосы движения, где транспортное средство в данный момент времени находится, с использованием метода наименьших квадратов для подбора кривой;
усреднение коэффициентов кривой левого края и кривой правого края по формуле:
 ,
,
получение уравнения безопасного пути для движения транспортного средства по центральной линии полосы движения;
посредством формулы
 ,
,
вычисление ширины полосы движения, на которой в данный момент времени находится транспортное средство,  представляет исторически минимальную ширину полосы движения за прошлый период
представляет исторически минимальную ширину полосы движения за прошлый период  времени и
времени и  .
.
4. Способ по п.2 или 3, в котором определение указанной области смещения, где в данный момент времени находится транспортное средство, в соответствии с коэффициентом уравнения безопасного пути и шириной полосы движения, включает в себя:
посредством формулы:  ,
,
вычисляют функцию  сбоя в соответствии с шириной полосы движения и расстоянием поперечного смещения, при этом
сбоя в соответствии с шириной полосы движения и расстоянием поперечного смещения, при этом  является шириной полосы движения полосы, на которой в данный момент времени находится транспортное средство, и коэффициентом является расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;
является шириной полосы движения полосы, на которой в данный момент времени находится транспортное средство, и коэффициентом является расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;
если функция  сбоя меньше, чем первое установленное значение
сбоя меньше, чем первое установленное значение  отношения, определяют указанную область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве первой области
отношения, определяют указанную область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве первой области  смещения;
смещения;
если функция сбоя больше или равна первому установленному значению отношения и меньше второго заданного значения  отношения, определяют указанную область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве второй области
отношения, определяют указанную область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве второй области  смещения; и
смещения; и
если функция сбоя больше или равна второму заданному значению отношения, определяют указанную область смещения в полосе движения, где в данный момент времени находится транспортное средство, в качестве третьей области  смещения.
смещения.
5. Способ по п.1 или 4, в котором указанное определение текущего уровня сбоя основной подсистемы управления в соответствии с областью смещения, где в данный момент времени находится транспортное средство, и результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления, включает в себя следующее:
определяют текущий уровень сбоя основной подсистемы управления как высокий уровень сбоя в следующих случаях:
результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления, является активирование функции управления избыточностью первого уровня, или
результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления, является активирование функцию управления избыточностью второго уровня, или
результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления, является не активирование функции управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является третьей областью смещения;
при этом при условии, что
результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления, является активирование функции управления избыточностью второго уровня, или
результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления, является не активирование функции управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является второй областью смещения,
сравнивают первую функцию  распознавания расположения транспортного средства со вторым установленным отношением ; и если первая функция распознавания расположения транспортного средства больше или равна второму установленному отношению , определяют текущий уровень сбоя основной подсистемы управления как высокий уровень сбоя; а если первая функция распознавания расположения транспортного средства меньше, чем второе заданное отношение , определяют текущий уровень сбоя основной подсистемы управления как средний уровень сбоя; и
распознавания расположения транспортного средства со вторым установленным отношением ; и если первая функция распознавания расположения транспортного средства больше или равна второму установленному отношению , определяют текущий уровень сбоя основной подсистемы управления как высокий уровень сбоя; а если первая функция распознавания расположения транспортного средства меньше, чем второе заданное отношение , определяют текущий уровень сбоя основной подсистемы управления как средний уровень сбоя; и
определяют текущий уровень сбоя основной подсистемы управления как низкий уровень сбоя в следующих случаях:
результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления, является активирование функции управления избыточностью второго уровня, или
результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления, является не активирование функции управления избыточностью, но область смещения в полосе движения, где в данный момент времени находится транспортное средство, является первой областью смещения.
6. Способ по п.5, в котором первую функцию распознавания расположения транспортного средства вычисляют по формуле:
 ,
,
где  - достоверность распознавания, является константой или получена путем подбора нейронной сети радиальной базисной функции (RBF) в соответствии со скоростью
- достоверность распознавания, является константой или получена путем подбора нейронной сети радиальной базисной функции (RBF) в соответствии со скоростью  транспортного средства, скоростью
транспортного средства, скоростью  рыскания транспортного средства, углом
рыскания транспортного средства, углом  рулевого колеса, кривизной
рулевого колеса, кривизной  центральной линии полосы движения и коэффициентом
центральной линии полосы движения и коэффициентом  сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемому передней камерой;
сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемому передней камерой;
причем если является константой, то  ; если получена путем подбора нейронной сети RBF, то диапазон значений
; если получена путем подбора нейронной сети RBF, то диапазон значений  составляет:
составляет:  ;
;
S является переменной скользящего режима, рассчитываемой по формуле:
 ,
,
уравнение гиперплоскости скользящего режима удовлетворяет условиям:  ;
;
 является шириной полосы движения, на которой в данный момент находится транспортное средство;
является шириной полосы движения, на которой в данный момент находится транспортное средство;  является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;
является расстоянием поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;  является путевым углом транспортного средства;
является путевым углом транспортного средства;  является коэффициентом безопасности расстояния поперечного смещения, принимаемым равным половине ширины
является коэффициентом безопасности расстояния поперечного смещения, принимаемым равным половине ширины  полосы движения,
полосы движения,  ;
;  является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
является безопасным путевым углом, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
 , где
, где  - верхнее безопасное предельное значение для обеспечения постепенного приближения транспортного средства к точке равновесия;
- верхнее безопасное предельное значение для обеспечения постепенного приближения транспортного средства к точке равновесия;  - нижнее безопасное предельное значение для обеспечения постепенного приближения транспортного средства к точке равновесия;
- нижнее безопасное предельное значение для обеспечения постепенного приближения транспортного средства к точке равновесия;  - максимальное безопасное поперечное ускорение транспортного средства; указанное максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
- максимальное безопасное поперечное ускорение транспортного средства; указанное максимальное безопасное поперечное ускорение транспортного средства рассчитывается по формуле:
 ,
,
 - протектор транспортного средства,
- протектор транспортного средства,  - высота центра масс транспортного средства,
- высота центра масс транспортного средства,  - ускорение свободного падения и
- ускорение свободного падения и  - коэффициент сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемому передней камерой.
- коэффициент сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемому передней камерой.
7. Способ по любому из пп.1, 5, 6, в котором активация функции управления избыточностью, соответствующей текущему уровню сбоя основной подсистемы управления, включает в себя следующее:
если текущий уровень сбоя основной подсистемы управления является высоким уровнем сбоя, активируют функцию управления избыточностью первого уровня;
если текущий уровень сбоя основной подсистемы управления является средним уровнем сбоя, активируют функцию управления избыточностью второго уровня; и
если текущий уровень сбоя основной подсистемы управления является низким уровнем сбоя, деактивируют функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня.
8. Способ по п.7, в котором управление транспортным средством в соответствии с функцией управления избыточностью включает в себя следующее:
если активирована функция управления избыточностью первого уровня, управляют электронной системой курсовой устойчивости (ESP) для замедления до первого целевого замедления в соответствии с рассчитанным полным замедлением  и управляют электроусилителем руля (EPS) для управления углом поворота рулевого колеса в период
и управляют электроусилителем руля (EPS) для управления углом поворота рулевого колеса в период  времени гибкого управления в соответствии с рассчитанным целевым углом
времени гибкого управления в соответствии с рассчитанным целевым углом  поворота рулевого колеса и максимальным безопасным крутящим моментом
поворота рулевого колеса и максимальным безопасным крутящим моментом  ; и
; и
если активирована функция избыточного управления второго уровня, управляют ESP для замедления до второго целевого замедления в соответствии с безопасным замедлением  , вычисленным второй функцией
, вычисленным второй функцией  распознавания расположения транспортного средства, и замедлением
распознавания расположения транспортного средства, и замедлением  , выведенным основной подсистемой управления,
, выведенным основной подсистемой управления,
при этом значение полного замедления больше безопасного замедления , рассчитанного в соответствии со второй функцией распознавания расположения транспортного средства, и замедления  , выведенного основной подсистемой управления; первая целевая скорость относится к текущему рабочему условию вождения; вторая целевая скорость относится к целевой скорости, выдаваемой основной подсистемой управления, и вторая целевая скорость меньше целевой скорости, выдаваемой основной подсистемой управления.
, выведенного основной подсистемой управления; первая целевая скорость относится к текущему рабочему условию вождения; вторая целевая скорость относится к целевой скорости, выдаваемой основной подсистемой управления, и вторая целевая скорость меньше целевой скорости, выдаваемой основной подсистемой управления.
9. Способ по п.8, в котором посредством формулы:
 ,
,
рассчитывают целевой угол  поворота рулевого колеса;
поворота рулевого колеса;  является кривизной центральной линии полосы движения; - путевой угол транспортного средства;
является кривизной центральной линии полосы движения; - путевой угол транспортного средства;  - ширина полосы движения, на которой в данный момент находится транспортное средство;
- ширина полосы движения, на которой в данный момент находится транспортное средство;  - передаточное отношение системы рулевого управления транспортного средства;
- передаточное отношение системы рулевого управления транспортного средства;  - адаптивный параметр;
- адаптивный параметр;  - ось транспортного средства;
- ось транспортного средства;  - скорость транспортного средства;
- скорость транспортного средства;  - начальное значение адаптивного параметра и является константой; - коэффициент безопасности расстояния поперечного смещения, принимаемый равным половине ширины полосы , ; S - переменная скользящего режима, вычисляемая по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет условию: ; - безопасный путевой угол, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
- начальное значение адаптивного параметра и является константой; - коэффициент безопасности расстояния поперечного смещения, принимаемый равным половине ширины полосы , ; S - переменная скользящего режима, вычисляемая по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет условию: ; - безопасный путевой угол, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, где - безопасный верхний предел для обеспечения постепенного приближения транспортного средства к точке равновесия; - безопасный нижний предел для обеспечения постепенного приближения транспортного средства к точке равновесия; - максимальное безопасное поперечное ускорение транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывают по формуле:
- протектор транспортного средства, - высота центра масс транспортного средства, - ускорение свободного падения и - коэффициент сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемый системой обнаружения транспортного средства;
адаптивный параметр  рассчитывают по формуле:
рассчитывают по формуле:
 ; - расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;
; - расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства;  является функцией мертвой зоны для мертвой зоны
является функцией мертвой зоны для мертвой зоны  , и функция равна нулю;
, и функция равна нулю;  - скорость рыскания транспортного средства; - коэффициент безопасности расстояния поперечного смещения, принимаемый равным половине ширины полосы движения, ;
- скорость рыскания транспортного средства; - коэффициент безопасности расстояния поперечного смещения, принимаемый равным половине ширины полосы движения, ;  - параметр безопасной скорости рыскания, установленный для предотвращения слишком большой относительной скорости рыскания транспортного средства,
- параметр безопасной скорости рыскания, установленный для предотвращения слишком большой относительной скорости рыскания транспортного средства,  - параметр адаптивной скорости и
- параметр адаптивной скорости и  - адаптивная верхняя граница.
- адаптивная верхняя граница.
10. Способ по п.8, в котором по формуле:
 ,
,
рассчитывают целевой угол поворота рулевого колеса; - кривизна центральной линии полосы движения; - путевой угол транспортного средства; - ширина полосы движения, на которой в данный момент находится транспортное средство; - передаточное отношением системы рулевого управления транспортного средства; - адаптивный параметр; - ось транспортного средства; - скорость транспортного средства; - начальное значение адаптивного параметра и является константой; - коэффициент безопасности расстояния поперечного смещения, принимаемый равным половине ширины полосы движения, ; S - переменная скользящего режима, вычисляемая по формуле: , уравнение гиперплоскости скользящего режима удовлетворяет условию: ; - безопасный путевой угол, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
, , где - верхний безопасный предел для обеспечения постепенного приближения транспортного средства к точке равновесия; - безопасный нижний предел для обеспечения постепенного приближения транспортного средства к точке равновесия; - максимальное безопасное поперечное ускорение транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывают по формуле:
,
- протектор транспортного средства, - высота центра масс транспортного средства, - ускорение свободного падения и - коэффициент сцепления с дорожным покрытием, соответствующий типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемому передней камерой;
адаптивный параметр рассчитывается по формуле:
;
- расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; является функция мертвой зоны для мертвой зоны и функция равна нулю; - скорость рыскания транспортного средства; - коэффициент безопасности расстояния поперечного смещения, принимаемый равным половине ширины полосы движения, ; - параметр безопасной скорости рыскания, установленный для предотвращения слишком большой относительной скорости рыскания транспортного средства, - параметр адаптивной скорости и - адаптивная верхняя граница;
функция насыщения:  , функция квази-насыщения:
, функция квази-насыщения:  ,
,  является произвольной непрерывной функцией, удовлетворяющая условиям
является произвольной непрерывной функцией, удовлетворяющая условиям  ,
,  ,
,  ;
;  - ширина пограничного уровня квази-скользящего режима, является константой.
- ширина пограничного уровня квази-скользящего режима, является константой.
11. Способ по любому из пп.8, 9, 10, в котором согласно второй функции  распознавания расположения транспортного средства по формуле:
распознавания расположения транспортного средства по формуле:
рассчитывают безопасное замедление  ;
;
- ускорение свободного падения; - коэффициент сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемому передней камерой;  - максимальное безопасное замедление транспортного средства,
- максимальное безопасное замедление транспортного средства,  ;
;  - минимальное безопасное замедление транспортного средства и является константой;
- минимальное безопасное замедление транспортного средства и является константой;  - момент времени, когда транспортное средство въезжает во вторую область
- момент времени, когда транспортное средство въезжает во вторую область  смещения из первой области смещения;
смещения из первой области смещения;  - текущий момент времени; - скорость рыскания транспортного средства; - скорость транспортного средства;
- текущий момент времени; - скорость рыскания транспортного средства; - скорость транспортного средства;
 - коэффициент замедления, определяемый в зависимости от управляемости и устойчивости шасси транспортного средства, рассчитываемый по формуле:
- коэффициент замедления, определяемый в зависимости от управляемости и устойчивости шасси транспортного средства, рассчитываемый по формуле:  ;
;  - скорость миграции критической нагрузки с точки зрения безопасности и является постоянной величиной;
- скорость миграции критической нагрузки с точки зрения безопасности и является постоянной величиной;  - средняя скорость миграции нагрузки, вычисляемая по формуле:
- средняя скорость миграции нагрузки, вычисляемая по формуле:  ,
,  - текущий момент времени,
- текущий момент времени,  - момент времени определения, - протектор транспортного средства и - высота центра масс транспортного средства;
- момент времени определения, - протектор транспортного средства и - высота центра масс транспортного средства;
 - количественный интегральный параметр оценки сбоя, рассчитываемый по формуле:
- количественный интегральный параметр оценки сбоя, рассчитываемый по формуле:  ,
,  - приращение критического для безопасности путевого угла и является константой;
- приращение критического для безопасности путевого угла и является константой;
 - переменная скользящего режима, вычисляемая по формуле:
- переменная скользящего режима, вычисляемая по формуле:  ; - расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; - путевой угол транспортного средства; - кривизна центральной линии полосы движения; - ширина полосы движения, на которой в данный момент находится транспортное средство; - коэффициент безопасности расстояния поперечного смещения, принимаемый половине ширины полосы движения, ; - безопасный путевой угол, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
; - расстояние поперечного смещения центральной линии полосы движения относительно начала системы координат транспортного средства; - путевой угол транспортного средства; - кривизна центральной линии полосы движения; - ширина полосы движения, на которой в данный момент находится транспортное средство; - коэффициент безопасности расстояния поперечного смещения, принимаемый половине ширины полосы движения, ; - безопасный путевой угол, при котором транспортное средство постепенно возвращается в первую область смещения, когда транспортное средство съезжает с центральной линии полосы движения; безопасный путевой угол рассчитывается по формуле:
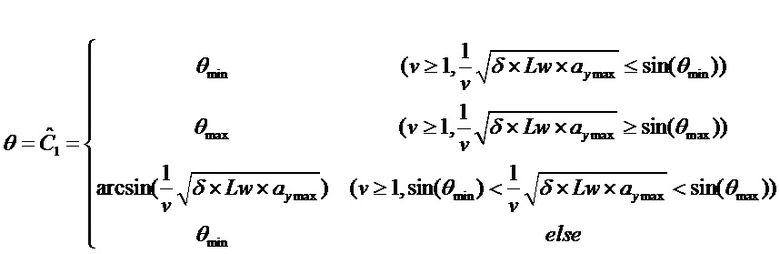
, где - безопасный верхний предел для обеспечения поступательного приближения транспортного средства к точке равновесия; - безопасный нижний предел для обеспечения постепенного приближения транспортного средства к точке равновесия; - максимальное безопасное поперечное ускорение транспортного средства; максимальное безопасное поперечное ускорение транспортного средства рассчитывают по формуле:
,
- протектор транспортного средства, - высота центра масс транспортного средства, - ускорение свободного падения и - коэффициент сцепления с дорожным покрытием, соответствующим типу дорожного покрытия полосы, на которой в данный момент времени находится транспортное средство, распознаваемому системой обнаружения транспортного средства.
12. Способ по п.8 или 11, в котором
максимальный безопасный крутящий момент  рассчитывают по формуле:
рассчитывают по формуле:
 ,
,
первый крутящий момент  получают путем поиска таблицы, в соответствии со скоростью
получают путем поиска таблицы, в соответствии со скоростью  транспортного средства из заданной таблицы отношений скорости транспортного средства и первого крутящего момента
транспортного средства из заданной таблицы отношений скорости транспортного средства и первого крутящего момента  , и второй крутящий момент
, и второй крутящий момент  выводится EPS; посредством формулы:
выводится EPS; посредством формулы:
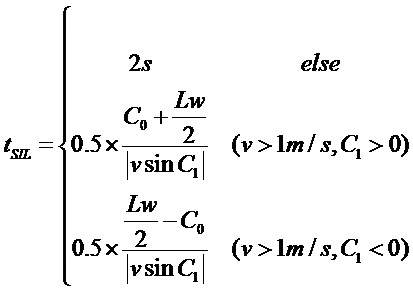
рассчитывают период  гибкого управления и указанный период гибкого управления удовлетворяет условиям:
гибкого управления и указанный период гибкого управления удовлетворяет условиям:  .
.
13. Способ по п.7 или 10, в котором управление EPS для управления углом поворота рулевого колеса в период времени гибкого управления в соответствии с вычисленным целевым углом поворота рулевого колеса и максимальным безопасным крутящим моментом включает в себя
определение значения  команды интерполяционного угла поворота рулевого колеса, соответствующего различным моментам t интерполяции, посредством интерполяции сигмоидной функции;
команды интерполяционного угла поворота рулевого колеса, соответствующего различным моментам t интерполяции, посредством интерполяции сигмоидной функции;
посредством формулы  :
:
вычисление значения команды интерполяционного угла поворота рулевого колеса и периода  времени интерполяции,
времени интерполяции,  является разницей между фактическим значением
является разницей между фактическим значением  обратной связи угла поворота рулевого колеса транспортного средства, соответствующим моменту времени, когда активирована функция управления избыточностью первого уровня, и целевым углом
обратной связи угла поворота рулевого колеса транспортного средства, соответствующим моменту времени, когда активирована функция управления избыточностью первого уровня, и целевым углом  поворота рулевого колеса; и
поворота рулевого колеса; и
вывод интерполяционного угла поворота рулевого колеса, соответствующего каждому моменту t интерполяции в течение периода  времени гибкого управления, в EPS, так что EPS регулирует угол поворота рулевого колеса транспортного средства от фактического значения обратной связи угла поворота рулевого колеса до значения команды интерполяционного угла поворота рулевого колеса при условии максимального безопасного крутящего момента
времени гибкого управления, в EPS, так что EPS регулирует угол поворота рулевого колеса транспортного средства от фактического значения обратной связи угла поворота рулевого колеса до значения команды интерполяционного угла поворота рулевого колеса при условии максимального безопасного крутящего момента  .
.
14. Способ по п.1, в котором дополнительно:
в случае, когда система автоматического вождения является системой автоматического вождения высокого уровня L4 или L5, когда транспортное средство управляется в соответствии с функцией управления избыточностью первого уровня или функцией управления избыточностью второго уровня, оценивают, выполняются ли следующие требования: область смещения, где в данный момент времени находится транспортное средство, стабилизирована как первая область  смещения, оценивают, является ли скорость транспортного средства меньше наименьшей предельной скорости транспортного средства на полосе движения, где транспортное средство в данный момент времени находится, или нет, и является ли состояние дороги полосы движения, на которой в данный момент находится транспортное средство, хорошим состоянием дороги;
смещения, оценивают, является ли скорость транспортного средства меньше наименьшей предельной скорости транспортного средства на полосе движения, где транспортное средство в данный момент времени находится, или нет, и является ли состояние дороги полосы движения, на которой в данный момент находится транспортное средство, хорошим состоянием дороги;
при выполнении указанных требований выводят оперативную информацию для побуждения системы безопасности принять управление транспортным средством;
определяют, принимает ли система безопасности управление транспортным средством на себя;
когда система безопасности берет на себя управление транспортным средством, отключают функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня и прекращают вывод любой команды управления в EPS и ESP;
в случае если система автоматического вождения представляет собой систему автоматического вождения среднего уровня L2.5 или L3, когда транспортное средство управляется в соответствии с функцией управления избыточностью первого уровня или функцией управления избыточностью второго уровня, выводят оперативную информацию для побуждения водителя принять на себя управление транспортным средством;
определяют, берет ли водитель на себя управление транспортным средством; и
когда водитель берет на себя управление транспортным средством, отключают функцию управления избыточностью первого уровня или функцию управления избыточностью второго уровня и прекращают вывод любой команды управления в EPS и ESP.
15. Система автоматического вождения, содержащая основную подсистему управления и подсистему управления избыточностью, при этом подсистема управления избыточностью содержит
первый компонент определения, выполненный с возможностью определять, когда активирована функция автоматического вождения системы автоматического вождения, область смещения в полосе движения, где в данный момент времени находится транспортное средство, причем областью смещения называется область, в которой абсолютное значение отношения поперечного расстояния к ширине полосы движения, где в данный момент времени находится транспортное средство, находится в пределах конкретного диапазона отношений, и поперечным расстоянием называется расстояние между линией границы области смещения и центральной линией полосы движения, на которой транспортное средство в данный момент времени находится, вдоль направления поперечной оси системы координат транспортного средства;
второй компонент определения, выполненный с возможностью определять текущий уровень сбоя основной подсистемы управления в соответствии с областью смещения, где в данный момент времени находится транспортное средство, и результатом управления, выведенным подсистемой управления избыточностью в предшествующем цикле управления; и
компонент арбитража, выполненный с возможностью активировать функцию управления избыточностью, соответствующую текущему уровню сбоя основной подсистемы управления, и управлять транспортным средством в соответствии с функцией управления избыточностью.
16. Транспортное средство, оснащенное системой автоматического вождения, содержащее систему автоматического вождения по п.15.
17. Контроллер, содержащий память и процессор, в котором в памяти хранится по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд, при этом указанные по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд загружаются и выполняются процессором для реализации способа управления избыточностью по любому из пп.1-14.
18. Машиночитаемый носитель данных, хранящий по меньшей мере одну команду, по меньшей мере одну программу, набор кодов или набор команд, причем указанные по меньшей мере одна команда, по меньшей мере одна программа, набор кодов или набор команд загружаются и выполняются процессором для реализации способа управления избыточностью по любому из пп.1-14.