Изобретение относится к области радиолокации и может быть использовано на самолетах и вертолетах.
Известны многофункциональные бортовые радиолокационные станции (БРЛС), которые устанавливают на магистральных самолетах всех классов для обнаружения грозовых фронтов и кучевой облачности, обзора земной поверхности в передней полусфере, для обнаружения наземных сооружений и определения береговой черты крупных водоемов.
Аналогами таких РЛС могут быть отечественные БРЛС «Градиент» и «Контур», устанавливаемые на самолеты типа «ЯК» и «ТУ».
В качестве прототипа рассматривается многофункциональная радиолокационная станция А 813 «Контур».
Радиолокационная станция «Контур» предназначена для установки на легкие самолеты местных воздушных линий и тяжелые вертолеты ГА.
БРЛС «Контур» разработана по традиционной схеме с передатчиком на магнетроне, ее описание приведено в книге «Радиолокационные системы воздушных судов». - М.: Транспорт, 1988 г., стр.209.
Блок-схема БРЛС прототипа приведена на фиг.1
БРЛС содержит:
1 - антенный блок, включающий в себя;
- щелевую антенну - 2
- привод антенны - 3
4 - приемопередающий блок, включающий в себя:
- передатчик - 5
- антенный переключатель - 6
- приемник - 7
8 - индикаторный блок, включающий в себя:
- задающий генератор - 9
- синхронизатор - 10
- индикатор - 11
- преобразователь сигнала - 12
- накопительно-запоминающее устройство - 13
14 - лицевую панель, основным элементом которой является:
- пульт управления - 15.
Многофункциональная БРЛС в режимах обнаружения грозовых фронтов, обзора земной поверхности, определения береговой черты работает следующим образом.
Синхронизация работы всех блоков и устройств осуществляется синхронизатором (10). Частота повторения и длительность вырабатываемых синхронизатором импульсов определяются частотой задающего генератора 9, равной 3 МГц. Эта частота является опорной, из которой формируются все пусковые импульсы, в том числе импульс запуска передатчика (5). Мощный СВЧ-импульс передатчика (5) (магнетрона) через антенный переключатель (6) поступает в щелевую антенну (2) и излучается в пространство. Обзор пространства осуществляется диаграммой направленности, формируемой щелевой антенной (2) антенного блока (1). Привод щелевой антенны (3) осуществляет движение антенны по углам азимута и наклона.
Принятые антенной (2) отраженные сигналы через антенный переключатель (6) поступают в приемник (7), где в смесителе осуществляется преобразование СВЧ-сигнала в импульсы промежуточной частоты. Далее сигнал поступает в предварительный усилитель промежуточной частоты и затем в линейно-логарифмический усилитель промежуточной частоты с детектором. С выхода приемника (7) видеосигналы поступают в индикаторный блок (8) на преобразователь сигнала (12), где преобразуются из аналоговой формы в двоично-квантованный код по трем уровням квантования. Из преобразователя сигнала (12) сигналы поступают в накопительно-запоминающее устройство (13), где производится накопление пяти реализаций сигнала и их запоминание. Из устройства памяти сигнал поступает в синхронизатор (10) на видеоусилитель, из которого он поступает на модулятор яркости изображения на экране ЭЛТ-индикатора (11).
Включение РЛС и управление режимами производится органами на пульте управления 15.
Недостатком приведенной многофункциональной РЛС является отсутствие в ней функции, необходимой при полете носителя на малых высотах - обнаружение и определение высоты наземных препятствий. Как показали разработки, реализация функции обнаружения и определения высоты наземных препятствий требует применения узкого луча в угломестной плоскости для обеспечения необходимой высокой точности измерения высоты. Однако в приведенном прототипе многофункциональной БРЛС с реализованной апертурой щелевой антенны величина угла диаграммы направленности в угломестной плоскости составляет θβ≥8°. Такая широкая диаграмма направленности в угломестной плоскости не позволяет отселектировать отраженные сигналы от наземных препятствий (возвышенности, строения, опоры ЛЭП, трубы и т.д.) от отраженных сигналов земной поверхности (фона местности), попадающих в один и тот же элемент дальности, и не позволяет с необходимой точностью оценить высоту препятствий.
Задачей изобретения является реализация многофункциональной БРЛС с дополнительной функцией - обнаружение и определение высоты наземных препятствий. В предлагаемой многофункциональной БРЛС эта функция обеспечивается путем обужения луча антенны в угломестной плоскости на прием, при котором исключается влияние сигналов отражений от поверхности земли и других отражателей, идущих под углами, отличающимися от заданных углов, определяемых опорной плоскостью - плоскостью безопасности.
Обужение суммарной диаграммы направленности щелевой антенны БРЛС на прием позволяет обнаруживать и с заданной точностью оценивать высоту наземных препятствий. Эта задача решается тем, что в многофункциональной БРЛС применяется щелевая антенна с электромеханическим приводом, в которой путем разделения известными способами площади зеркала на две половины и применения волноводных мостов формируется кроме основного луча (суммарная диаграмма двух половин площади антенны) также разностная диаграмма в угломестной плоскости.
Для реализации задачи обужения суммарной диаграммы на прием с помощью разностной диаграммы в цифровой процессор сигналов вводится устройство обужения суммарного луча.
Обужение суммарной диаграммы производится в цифровом процессоре сигналов путем вычитания из одноименных по дальности сигналов, принятых суммарной диаграммой, сигналов, принятых разностной диаграммой.
Сигналы разностной диаграммы вычитаются с определенным весом, который определяет величину обужения луча.
При работе РЛС во время сканирования антенны в угломестной плоскости принимаемые сигналы каналов суммы и разности после их первичной обработки накапливаются в памяти процессора сигналов по дальности. При вторичной обработке сигналов, накопленных в памяти устройства обужения, из одноименных сигналов ИΣ по дальности суммарного канала (суммарной диаграммы антенны) вычитаются сигналы разностного канала ИΔ (разностной диаграммы антенны) по формуле:
|ИΣ|-К|ИΔ|=|ИΣ|об
где К - коэффициент усиления сигналов разностного канала.
Величина обуженного угла θβ суммарной диаграммы при таком обужении определяется коэффициентом усиления «К» сигналов, принятых разностной диаграммой.
Значение коэффициента «К» принимается компромиссным решением между величиной обуженного угла и допустимыми потерями мощности применяемого сигнала.
Дополнительное обужение суммарной диаграммы и снижение уровня боковых лепестков диаграммы направленности обеспечивается путем умножения сигналов первичной суммарной диаграммы на сигналы обуженной суммарной диаграммы.
|ИΣ|·|ИΣоб|=|И*Σоб|
В результате таких операций при сканировании антенны по углу места формируются сигналы отражений от препятствий в координатах дальность - высота и выдаются на индикатор. Для этого в цифровом процессоре данных по информации о дальности и угле места определяется высота препятствий относительно опорной высоты.
На фиг.1 приведена блок-схема бортовой радиолокационной станции прототипа.
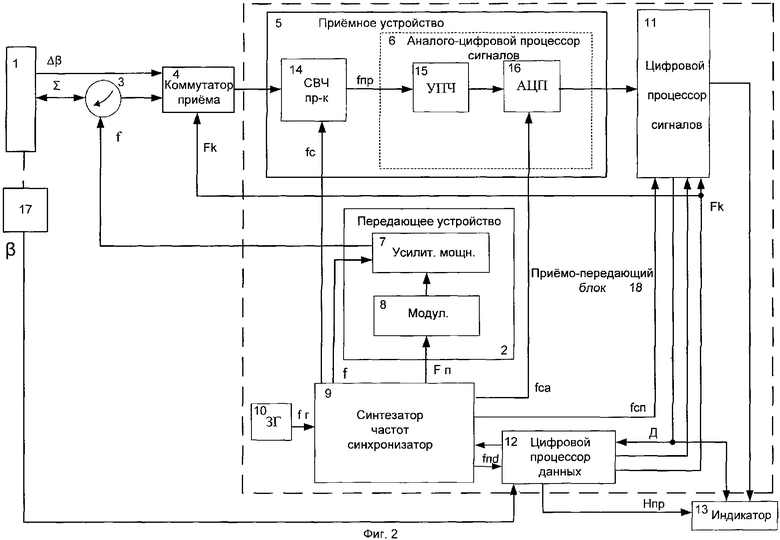
На фиг.2 представлена блок-схема предлагаемой многофункциональной радиолокационной станции.
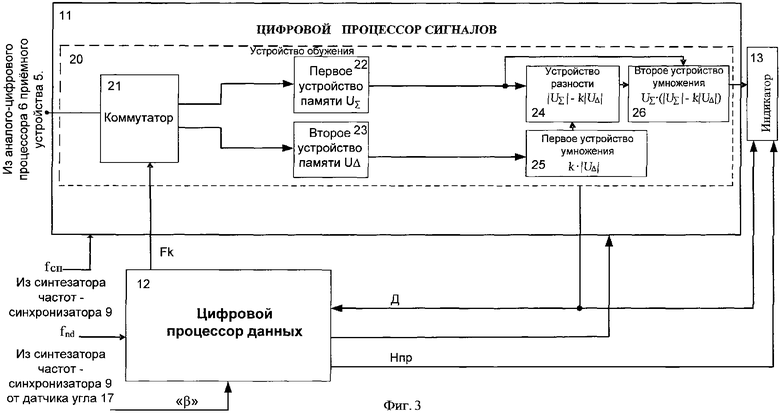
На фиг.3 представлена развернутая структурная схема цифрового процессора сигналов 11.
В предлагаемую многофункциональную радиолокационную станцию входят:
1 - щелевая антенна;
2 - передающее устройство;
3 - циркулятор;
4 - коммутатор приема;
5 - приемное устройство;
6 - аналого-цифровой процессор;
7 - усилитель мощности;
8 - модулятор;
9 - синтезатор частот-синхронизатор;
10 - задающий генератор;
11 - цифровой процессор сигналов;
12 - цифровой процессор данных;
13 - индикатор;
14 - СВЧ-приемник;
15 - усилитель промежуточной частоты;
16 - АЦП;
17 - датчик угла;
18 - приемопередающий блок, включающий в себя устройства 5, 6, 7, 8, 9, 10, 11, 12, 14, 15 и 16.
20 - устройство обужения;
21 - коммутатор;
22 - первое устройство памяти;
23 - второе устройство памяти;
24 - устройство разности;
25 - первое устройство умножения;
26 - второе устройство умножения.
Предлагаемая многофункциональная БРЛС с приведенным составом аппаратуры обеспечивает решение перечисленных задач прототипа, а также решает дополнительную задачу - обнаружение и определение высоты наземных препятствий при маловысотном полете.
Следует отметить, что построение аппаратуры БРЛС в настоящее время существенно отличается по своему уровню от построения аппаратуры на период создания прототипа БРЛС.
Прежде всего это относится к внедрению методов и аппаратуры цифровой обработки сигналов, вычислению параметров и сигналов управления с помощью цифровых процессоров. В связи с этим цифровой процессор сигналов 11 и цифровой процессор данных 12, примененные в предлагаемой многофункциональный БРЛС, не являются отличительными признаками (хотя их нет в прототипе БРЛС) и в формуле изобретения они введены в ограничительную часть.
Ниже дается описание взаимодействия и связей блоков и устройств, работающих при решении задачи обнаружения и определения высоты наземных препятствий.
Для передачи излучающих импульсов в щелевую антенну вход-выход антенны 1 через циркулятор 3 соединен с выходом передающего устройства 2.
Для приема сигналов суммарной диаграммы направленности щелевой антенны 1 вход-выход щелевой антенны 1 через циркулятор 3 соединен с первым входом коммутатора приема 4, выход которого соединен с входом приемного устройства 5. Для приема сигналов разностной диаграммы направленности второй выход щелевой антенны соединен со вторым входом коммутатора приема 4. Для коммутации принимаемых сигналов третий вход коммутатора приема 4 по сигналу коммутации Fk соединен с третьим выходом процессора данных 12. Для формирования запускающих и синхронизирующих сигналов выход задающего генератора 10 соединен с первым входом синтезатора частот-синхронизатора 9. Для запуска передающего устройства первый выход синтезатора частот-синхронизатора 9 по сигналу запуска Fп соединен с первым входом передающего устройства 2, а для формирования излучаемого СВЧ-сигнала f, второй выход синтезатора частот-синхронизатора 9 соединен со вторым входом передающего устройства 2. Для формирования промежуточной частоты принимаемого сигнала fпр третий выход синтезатора частот-синхронизатора 9 по сигналу гетеродинной частоты fc соединен со вторым входом приемного устройства 5. Для формирования сигналов дискретизации аналого-цифрового преобразователя (АЦП) 6 четвертый выход синтезатора частот-синхронизатора 9 по сигналу частоты fca соединен с третьим входом приемного устройства 5, а для синхронизации работы цифрового процессора сигналов 11 пятый выход синтезатора по сигналу тактовой частоты fсп соединен со вторым входом цифрового процессора сигналов 11. Для синхронизации работы цифрового процессора данных 12 шестой выход синтезатора частот-синхронизатора 9 по сигналу fпd соединен с первым входом цифрового процессора данных 12. Для управления режимами синтезатора частот-синхронизатора 9 первый выход цифрового процессора данных 12 соединен со вторым входом синтезатора частот-синхронизатора 9. Для коммутации сигналов в цифровом процессоре сигналов 11, в режиме обужения суммарной диаграммы направленности, третий выход цифрового процессора данных 12 по сигналу Fk соединен с четвертым входом цифрового процессора сигналов 11. Для управления режимами работы и выдачи исходных параметров второй выход цифрового процессора данных 12 соединен с третьим входом цифрового процессора сигналов 11 (по специальному интерфейсу в соответствии с ГОСТ).
Для приема и обработки радиолокационной информации первый вход процессора сигналов 11 по специальному интерфейсу соединен с выходом приемного устройства 5, а для отображения РЛ-информации первый выход цифрового процессора сигналов 11 соединен с первым входом индикатора 13.
Для обужения суммарной диаграммы направленности на прием в цифровой процессор сигналов 11 введено устройство обужения 20, состоящее из коммутатора 21, первого устройства памяти 22, второго устройства памяти 23, устройства разности 24, первого устройства умножения 25 и второго устройства умножения 26. Накопление сигналов в первом 22 или втором 23 устройствах памяти производится через коммутатор 21, на вход которого подаются сигналы из аналого-цифрового процессора сигналов 6 приемного устройства 5.
При этом выход приемного устройства 5 соединен со входом коммутатора 21, первый выход коммутатора 21 соединен со входом первого устройства памяти 22. Второй выход коммутатора 21 соединен со входом второго устройства памяти 23, выход первого устройства памяти 22 соединен с первым входом устройства разности 24 и вторым входом второго устройства умножения 26, выход второго устройства памяти 23 соединен с первым устройством умножения 25, выход которого соединен со вторым входом устройства разности 24, выход которого соединен с первым входом второго устройства умножения 26, для отображения РЛ-информации, выход второго устройства умножения соединен с первым входом индикатора 13.
Для коммутации сигналов суммарного и разностного каналов при накоплении третий выход цифрового процессора данных 12 по сигналу Fk соединен с четвертым входом процессора сигналов 11.
Для определения высоты препятствий Нпр датчик угла места 17 щелевой антенны 1 по сигналу «β» соединен с третьим входом цифрового процессора данных 12, а второй выход цифрового процессора сигналов 11 по сигналу дальности «Д» соединен с вторым входом цифрового процессора данных 12.
Для отображения информации о наземных препятствиях в координатах дальность - высота второй вход индикатора 13 по сигналу Нпр соединен с четвертым выходом цифрового процессора данных 12, а третий вход индикатора 13 соединен со вторым выходом цифрового процессора сигналов 11.
БРЛС в режиме обнаружения и измерения высоты препятствий работает следующим образом.
В режиме сканирования антенны в угломестной плоскости усилитель мощности 7 передающего устройства 2 усиливает высокочастотные импульсы «f», поступающие из синтезатора частот-синхронизатора 9, и через циркулятор 3 передает их в щелевую антенну 1. Щелевой антенной эти импульсы излучаются в пространство и распространяются в направлении, определяемом диаграммой направленности щелевой антенны. Стабильность несущей частоты «f» определяется задающим генератором 10. На вход модулятора 8 из синтезатора частот-синхронизатора 9 поступают импульсы запуска (Fп), которые формируется путем деления частоты сигнала «fг» задающего генератора 10. Длительность импульса также формируется в синтезаторе частот-синхронизаторе 9 путем использования периода сигнала «fг».
Высокочастотный сигнал несущей частоты f также формируется синтезатором частот-синхронизатором. От задающего генератора 10 сигнал с частотой fг поступает в синтезатор частот-синхронизатор 9, умножается до частоты (f) и используется в качестве несущей частоты радиолокационного сигнала, излучаемого щелевой антенной 1.
Модулятор 8 осуществляет модуляцию высокочастотного сигнала «f» сформированными импульсами, поступающими в усилитель мощности 7 передающего устройства 2, имеющими заданную длительность (τ), а также период повторения (Тп), определяемый однозначной дальностью. С целью сокращения массы и габаритов аппаратуры применяется один приемный канал, при этом прием одновременно поступающих отраженных сигналов, принятых суммарной и разностной диаграммами, разделяется во времени коммутатором приема 4 таким образом, чтобы за время приема обуженным лучом суммарной диаграммы энергия сигнала, определяемая временем накопления, была достаточна для обнаружения препятствий с заданной вероятностью. Это время определяется частотой коммутации Fk коммутатора, задаваемой цифровым процессором данных 12. В процессе сканирования щелевой антенны 1 отраженные сигналы от объектов и поверхности принимаются щелевой антенной 1, в которой сигналы, принятые суммарной диаграммой через циркулятор 3 и коммутатор 4, поступают в приемное устройство 5. В СВЧ-приемнике 14 эти сигналы в смесителе приемника смешиваются с сигналом синтезатора частот-синхронизатором fc, в результате чего образуются сигналы промежуточной частоты fпр. Сигналы промежуточной частоты fпр поступают в аналого-цифровой процессор 6, где в усилителе промежуточной частоты УПЧ 15 усиливаются и поступают в аналого-цифровой преобразователь АЦП 16, управляемый с помощью синхросигнала fca, где преобразуются в цифровую форму. С выхода АЦП 16 сигналы поступают в устройство обужения 20 цифрового процессора сигналов 11, синхронизуемого сигналом fсп.
Далее сигналы суммарной диаграммы в устройстве обужения 20 поступают на коммутатор 21. С выхода коммутатора 21 сигналы поступают на первое устройство памяти UΣ 22.
Поступающие отраженные сигналы и принятые разностной диаграммой щелевой антенны 1 непосредственно из щелевой антенны 1 поступают на коммутатор приема 4, и далее сигнал разностной диаграммы проходит аналогичную суммарному сигналу обработку. При такой обработке коммутаторы 4 и 21 (с помощью сигнала Fk цифрового процессора 12) синхронно переключаются на последовательный прием, обработку и накопление сигналов в устройствах памяти 22 и 23 суммарной и разностной диаграммы направленности щелевой антенны 1. Обужение суммарной диаграммы на прием производится в цифровом процессоре сигналов 11 в устройстве обужения 20 с помощью устройства разности 24, а также первого 25 и второго 26 устройств умножения путем вычитания накопленных в каждом элементе дальности сигналов разностной диаграммы UΔ из сигналов в одноименных элементах дальности суммарной диаграммы UΣ. Перед вычитанием сигналов сигналы разностной диаграммы UΔ поступают из второго устройства памяти 23 в первое устройство умножения 25, где умножаются на коэффициент усиления сигналов разностной диаграммы «К». Затем умноженный разностный сигнал KUΔ поступает в устройство разности 24, куда из первого устройства памяти 22 поступают сигналы суммарной диаграммы UΣ в одноименных элементах дальности.
В устройстве разности 24 производится вычитание усиленных сигналов разностной диаграммы из одноименных по дальности сигналов суммарной диаграммы |UΣ|-K|UΔ|=UΣобуж. Из устройства разности 24 сигналы поступают во второе устройство умножения 26, куда также поступают сигналы суммарной диаграммы из первого устройства памяти 22. Во втором устройстве умножения 26 производится умножение сигналов обуженной диаграммы на сигналы первичной суммарной диаграммы UΣобуж·UΣ.
В результате умножения производится дополнительное обужение диаграммы, и уменьшаются боковые лепестки первичной обуженной диаграммы.
Сигналы из второго устройства умножения поступают в индикатор 13 в моменты прихода сигнала, отраженного от наземных препятствий, и отображаются в нем в координатах дальность - высота. Для этого в цифровом процессоре данных 12 по информации о дальности «Д», поступающей из цифрового процессора сигналов 11, и углу места «β» щелевой антенны 1, поступающей из датчика угла 17, определяется высота препятствия Нпр относительно опорной плоскости.
Нпр=Но-Д·β,
где Но - высота безопасного полета относительно опорной плоскости (плоскости безопасности);
Д - дальность до препятствия;
β - угол места антенны относительно горизонтальной плоскости, проходящей через ось носителя.
Измеренное значение высоты препятствий Нпр также поступает в индикатор 13.
Для отображения РЛ-информации значение дальности «Д» в индикатор 13 поступает из цифрового процессора сигналов 11.
Технический результат заключается в возможности обнаружения наземных препятствий и определения их высоты в многофункциональных радиолокационных станциях, где по условиям размещения антенны на летательных аппаратах не удается применить антенну с апертурой, необходимой для получения узкого луча.
Реализация данного изобретения позволяет при применении коэффициента усиления сигналов разностной диаграммы К=5 обузить ширину суммарной диаграммы на прием более чем в 10 раз, что позволяет существенно уменьшить ошибку измерения высоты препятствий. При этом потери мощности сигнала будут составлять не более 2 дБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБУЖЕНИЯ ПРИЕМНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ И МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2014 |
|
RU2599932C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ПРЕПЯТСТВИЙ | 2005 |
|
RU2296344C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| Многофункциональная малогабаритная радиолокационная система для летательных аппаратов | 2016 |
|
RU2630278C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| Способ картографирования земной поверхности бортовой радиолокационной станцией с антенной решеткой | 2022 |
|
RU2798822C1 |
Изобретение относится к радиолокации. Техническим результатом является обнаружение и определение высоты наземных препятствий. Многофункциональная радиолокационная станция для летательных аппаратов состоит из щелевой антенны, циркулятора, приемопередающего блока, включающего в себя приемное устройство, состоящее из СВЧ-приемника и аналого-цифрового процессора сигналов, включающего в себя усилитель промежуточной частоты и аналого-цифровой преобразователь, передающего устройства, состоящего из усилителя мощности и модулятора, а также задающего генератора, синтезатора частот-синхронизатора, цифрового процессора сигналов, цифрового процессора данных, датчика угла места и индикатора, при этом цифровой процессор сигналов содержит устройство обужения суммарной диаграммы направленности, состоящее из коммутатора, первого устройства памяти, второго устройства памяти, устройства разности, первого устройства умножения и второго устройства умножения, щелевая антенна выполнена по структуре с суммарной и разностной диаграммой направленности в угломестной плоскости, а также введен коммутатор приема, при этом в цифровом процессоре сигналов производится обужение суммарной диаграммы направленности на прием с помощью разностной диаграммы направленности, а в цифровом процессоре данных по информации о дальности и угле места определяется высота препятствий относительно опорной плоскости (плоскости безопасности). 3 ил.
Многофункциональная радиолокационная станция для летательных аппаратов, состоящая из щелевой антенны, циркулятора, приемо-передающего блока, включающего в себя приемное устройство, состоящее из СВЧ приемника и аналого-цифрового процессора сигналов, включающего в себя усилитель промежуточной частоты (УПЧ) и аналого-цифровой преобразователь (АЦП), передающего устройства, состоящего из усилителя мощности и модулятора, а также задающего генератора, синтезатора частот-синхронизатора, цифрового процессора сигналов, цифрового процессора данных, а также датчика угла места и индикатора, при этом вход-выход щелевой антенны через циркулятор соединен с выходом передающего устройства, выход задающего генератора соединен с первым входом синтезатора частот-синхронизатора, первый выход синтезатора частот-синхронизатора соединен с первым входом передающего устройства, а второй выход синтезатора частот-синхронизатора соединен со вторым входом передающего устройства, третий выход синтезатора частот-синхронизатора соединен со вторым входом приемного устройства, четвертый выход синтезатора частот-синхронизатора соединен с третьим входом приемного устройства, а пятый выход соединен со вторым входом цифрового процессора сигналов, шестой выход соединен с первым входом цифрового процессора данных, первый выход которого соединен со вторым входом синтезатора частот-синхронизатора, а второй выход соединен с третьим входом цифрового процессора сигналов, первый вход цифрового процессора сигналов соединен с выходом приемного устройства, а первый выход цифрового процессора сигналов соединен с первым входом индикатора, выход датчика угла места соединен с третьим входом цифрового процессора данных, а второй выход цифрового процессора сигналов соединен со вторым входом цифрового процессора данных, отличающаяся тем, что цифровой процессор сигналов содержит устройство обужения суммарной диаграммы направленности, состоящее из коммутатора, первого устройства памяти, второго устройства памяти, устройства разности, первого устройства умножения и второго устройства умножения, щелевая антенна выполнена по структуре с суммарной и разностной диаграммой направленности в угломестной плоскости, а также введен коммутатор приема, при этом выход циркулятора соединен с первым входом коммутатора приема, выход которого соединен с приемным устройством, выход приемного устройства соединен со входом коммутатора, первый выход которого соединен со входом первого устройства памяти, а второй выход соединен со входом второго устройства памяти, выход первого устройства памяти соединен с первым входом устройства разности и вторым входом второго устройства умножения, выход второго устройства памяти соединен с первым устройством умножения, выход которого соединен со вторым входом устройства разности, выход устройства разности соединен с первый входом второго устройства умножения, выход которого соединен с первым входом индикатора, третий выход цифрового процессора данных соединен с третьим входом коммутатора приема и с четвертым входом цифрового процессора сигналов, второй вход индикатора соединен с четвертым выходом цифрового процессора данных, а третий вход индикатора соединен со вторым выходом цифрового процессора сигналов, при этом в цифровом процессоре сигналов производится обужение суммарной диаграммы направленности на прием с помощью разностной диаграммы направленности, а в цифровом процессоре данных по информации о дальности и угле места определяется высота препятствий относительно опорной плоскости (плоскости безопасности).
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| DE 3346155 A, 04.07.1985 | |||
| US 5614907 A, 25.03.1997. | |||

