Изобретение относится к измерительной технике и может быть использовано в качестве элемента в системах стабилизации навигации и наведения. Оно может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (патент РФ №2098833, МПК6 кл. 6 G01P 15/13, опубл. 10.12.97), содержащее чувствительный элемент, включающий в себя два неподвижных электрода и подвижную пластину, три усилителя, два резистора, при этом выход первого усилителя подключен к первому резистору, а вход второго усилителя соединен со вторым резистором и является выходом устройства. Для повышения помехоустойчивости при воздействии электрических помех в него введен источник опорного напряжения, генератор электрического сигнала, две транзисторные пары, три резистора, два конденсатора, позволяющих за счет охвата усилителя отрицательной обратной связью осуществлять компенсацию электрических помех.
Недостатком данного устройства является низкая точность измерения, так как выбор коэффициента усиления с жесткой отрицательной обратной связью ограничен условием устойчивости системы.
Наиболее близким по техническому решению является устройство (А.С. №742801, МПК6 кл. 6 G01P 15/13, опубл. 25.06.80 в бюл. №23), содержащее чувствительный элемент, датчик угла, интегрирующий усилитель обратной связи, датчик момента, дополнительный интегрирующий усилитель, электронный ключ, пороговый элемент, причем первый выход датчика угла подключен через интегрирующий усилитель обратной связи к датчику момента, а второй выход датчика угла через пороговый элемент и дополнительный интегрирующий усилитель подключен к управляющему входу электронного ключа.
Недостатком подобного устройства является низкая точность измерения, обусловленная точностью работы интегрирующих аналоговых усилителей и порогового элемента. Кроме того, точность измерения зависит от параметров схемы электронного ключа, осуществляющего выборку информации.
Основная погрешность устройства связана с конечностью времени заряда конденсатора интегрирующего усилителя. Эта погрешность приводит к апертурной ошибке, свойственной подобной схеме выборки и обработки информации.
Настоящее изобретение решает задачу повышения точности измерения ускорений и расширение полосы пропускания устройства.
Это достигается за счет того, что в устройство, содержащее чувствительный элемент, датчик угла и датчик момента, введены с выхода широкополосного усилителя на вход третьего сумматора последовательно по информационным входам первый сумматор, нелинейное звено с зоной нечувствительности, интегратор, второй сумматор, другой выход широкополосного усилителя через нелинейное звено с зоной ограничения и первый пороговый элемент с зоной неоднозначности соединен с входом первого сумматора, и выход нелинейного звена с зоной ограничения соединен с входом датчика момента через третий сумматор, кроме того, выход нелинейного звена с зоной нечувствительности через второй пороговый элемент с зоной неоднозначности соединен с входом второго сумматора, а выход датчика угла соединен с входом широкополосного усилителя, и выход нелинейного звена с зоной ограничения является выходом устройства для измерения ускорений.
Введение нелинейных элементов в структуру устройства для измерения ускорений, обеспечивает синхронизацию устройства при различных параметрах нелинейных звеньев с зоной нечувствительности, неоднозначности, зоной ограничения и порогового элемента с зоной неоднозначности, уменьшая при этом динамическую ошибку. Кроме того, включение в структуру для измерения ускорений нелинейных элементов, обеспечивают автоколебательный режим работы устройства, что в свою очередь увеличивает полосу пропускания и коэффициент усиления по разомкнутому контуру. Повышение точности достигается не только увеличением коэффициента передачи, но за счет включения в устройство интегратора, что обеспечивает астатизм первого порядка.
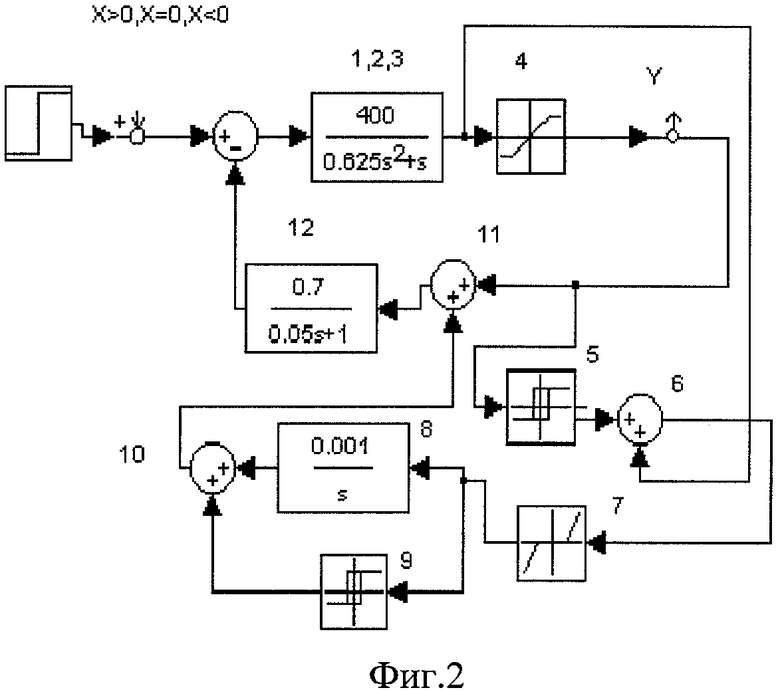
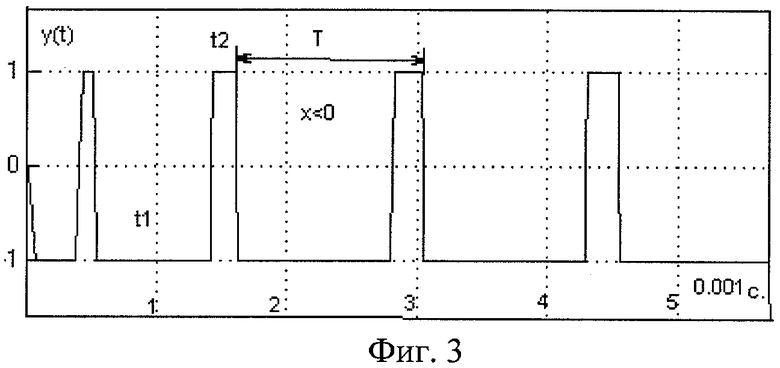
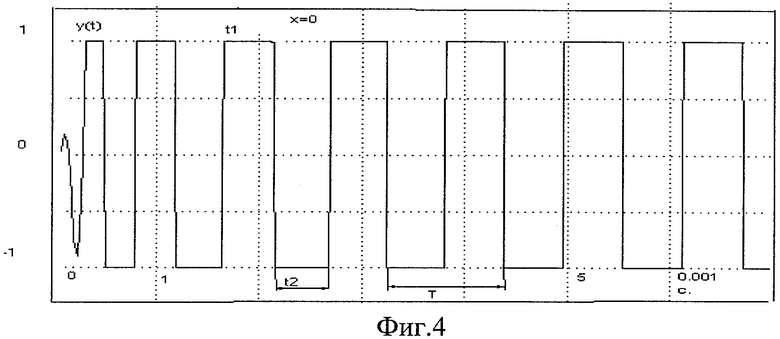
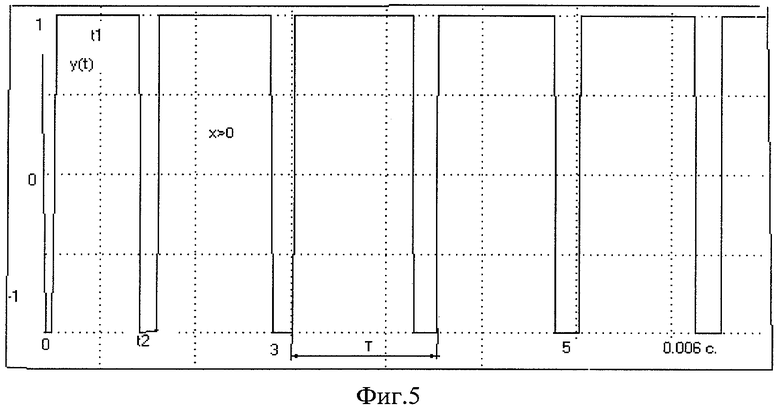
На фиг.1 изображена блок-схема устройства; на фиг.2 - схема моделирования устройства; на фиг.3, 4, 5 - результаты моделирования при различных входных воздействиях.
Предлагаемое устройство для измерения ускорений содержит чувствительный элемент 1, отклонение которого фиксирует датчик угла 2. Выход датчика угла 2 соединен с входом широкополосного усилителя 3, выход которого соединен с нелинейным звеном с зоной ограничения 4. Один из выходов нелинейного звена с зоной ограничения 4 соединен с входом первого порогового элемента с зоной неоднозначности 5, выход которого соединен с одним из входов первого сумматора 6. Один из выходов широкополосного усилителя 3 соединен с входом первого сумматора 6. Выход первого сумматора 6 соединен с входом нелинейного звена с зоной нечувствительности 7, выход которого соединен с входом интегратора 8. Выход нелинейного звена с зоной нечувствительности 7 соединен также с входом второго порогового элемента с зоной неоднозначности 9. Выходы интегратора 8 и второго порогового элемента с зоной неоднозначности 9 соединены с входом второго сумматора 10. Выходы нелинейного звена с зоной ограничения 4 и второго сумматора 10 соединены с входом третьего сумматора 11, выход которого соединен с входом датчика момента 12.
Внутреннее содержание и схемы реализации нелинейных звеньев с зонами ограничения и нечувствительности, порогового элемента с зоной неоднозначности, интегратора, сумматора и широкополосного усилителя приведены в книге: П. Хоровиц, У. Хилл. "Искусство схемотехники". М.: Мир, т. 1-3, 1993.
Устройство для измерения ускорений работает следующим образом.
При действии ускорения на чувствительный элемент 1 происходит отклонение чувствительного элемента 1, вызванное действием инерционного момента, которое фиксируется датчиком угла 2. Сигнал с датчика угла 2, в виде напряжения, поступает на вход широкополосного усилителя 3. Напряжение с широкополосного усилителя 3 подается как на вход нелинейного звена с зоной ограничения 4, так и на вход первого сумматора 6. Напряжение с выхода нелинейного звена с зоной ограничения 4 подается на вход первого порогового элемента с зоной неоднозначности 5, и выход с первого порогового элемента с зоной неоднозначности 5, в виде уровня напряжения, в зависимости от фазы отклонения чувствительного элемента 1 поступает на вход первого сумматора 6. Смещенный по уровню сигнал с выхода первого сумматора 6 поступает на вход нелинейного звена с зоной нечувствительности 7, а затем на вход интегратора 8, включение и выключение которого осуществляет второй пороговый элемент с зоной неоднозначности 9, и срабатывание интегратора происходит в зависимости от модуля напряжения. Сигналы с выхода интегратора 8 и второго порогового элемента с зоной неоднозначности 9 поступают на вход второго сумматора 10 и на выходе с второго сумматора 10 сигнал в виде уровня напряжения поступает на один из входов третьего сумматора 11. Выходное напряжение с третьего сумматора 11, смещенное по уровню в зависимости от фазы ускорения, подается на вход датчика момента 12, и развиваемый момент датчиком момента 12 компенсирует отклонение чувствительного элемента 1 по модулю и знаку в зависимости от фазы действующего ускорения.
Предложенное устройство для измерения ускорений работает в автоколебательном режиме и выходное напряжение с выхода нелинейного звена с зоной ограничения 4, в виде широтно-импульсной модуляции, может быть обработано по одному из способов, реализованных в патентах: РФ №2189046 С1, кл. G01P 15/13, опубл. 10.09.02 в Бюл. №25, №2171995 С1, кл. G01P 15/13, опубл. 10.08.01 в Бюл. №22.
Введение в устройство для измерения ускорений нелинейных элементов позволило изменить частоту среза характеристики разомкнутого контура (расширить полосу пропускания и коэффициент усиления), и изменение параметров устройства производится в соответствии с величиной сигнала рассогласования. Для линейных устройств (прототип) измерения ускорений параметры остаются постоянными и не зависят от величины сигнала рассогласования, что ограничивают как точность, так и полосу пропускания. В предлагаемом устройстве для измерения ускорений реализовано как изменение усиления по разомкнутому контуру, так и изменение постоянной времени чувствительного элемента, при этом происходит фильтрация высокочастотных помех при малых значениях рассогласования. Введение в устройство нелинейных элементов приводит также к устранению динамической ошибки, что в свою очередь повышает точность.
Полученные результаты подтверждены моделированием устройства по схеме (фиг.2), и результаты моделирования при различных входных воздействиях приведены при: Х<0 (фиг.3), Х=0 (фиг.4) и Х>0 (фиг.5), где Х - входное воздействие. Из анализа полученных результатов следует, что в предложенном устройстве для измерения ускорений имеют место устойчивые автоколебания, изменяющиеся по фазе в зависимости от знака входного воздействия и относительное изменение частоты которых пропорционально действующему ускорению.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2007 |
|
RU2329512C1 |
| Компенсационный акселерометр | 2022 |
|
RU2784473C1 |
| Акселерометр | 2024 |
|
RU2818692C1 |
| Компенсационный акселерометр | 2022 |
|
RU2792706C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2780407C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793895C1 |
| Компенсационный акселерометр | 2020 |
|
RU2738877C1 |
| Акселерометр | 2019 |
|
RU2696667C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2785946C1 |
| Компенсационный акселерометр | 2021 |
|
RU2756937C1 |
Изобретение предназначено для использования в качестве чувствительного элемента в системах стабилизации, навигации и наведения и может найти применение в приборах измерения механических величин компенсационного типа. Устройство содержит чувствительный элемент, датчик угла, датчик момента, широкополосный усилитель, с выхода которого введены на вход третьего сумматора последовательно по информационным входам первый сумматор, нелинейное звено с зоной нечувствительности, интегратор, второй сумматор. Другой выход широкополосного усилителя через нелинейное звено с зоной ограничения и первый пороговый элемент с зоной неоднозначности соединен с входом первого сумматора. Выход нелинейного звена с зоной ограничения соединен с входом датчика момента через третий сумматор. Кроме того, выход нелинейного звена с зоной нечувствительности через второй пороговый элемент с зоной неоднозначности соединен с входом второго сумматора, и выход датчика угла соединен с входом широкополосного усилителя. Выход нелинейного звена с зоной ограничения является выходом устройства для измерения ускорений. Техническим результатом является расширение полосы пропускания и повышение точности измерения. 5 ил.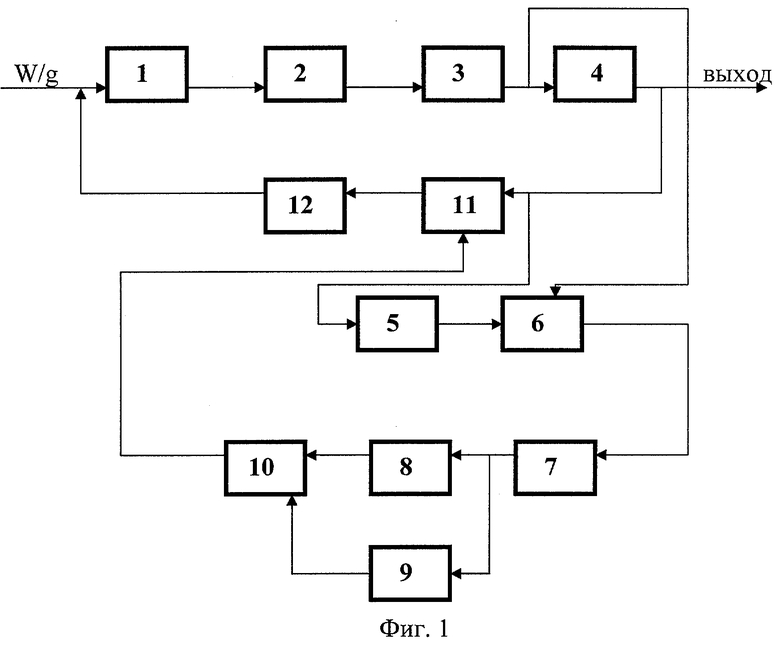
Устройство для измерения ускорений, содержащее чувствительный элемент, датчик угла и датчик момента, отличающееся тем, что в него введены с выхода широкополосного усилителя на вход третьего сумматора последовательно по информационным входам первый сумматор, нелинейное звено с зоной нечувствительности, интегратор, второй сумматор, другой выход широкополосного усилителя через нелинейное звено с зоной ограничения и первый пороговый элемент с зоной неоднозначности соединен с входом первого сумматора, и выход нелинейного звена с зоной ограничения соединен с входом датчика момента через третий сумматор, кроме того, выход нелинейного звена с зоной нечувствительности через второй пороговый элемент с зоной неоднозначности соединен с входом второго сумматора, а выход датчика угла соединен с входом широкополосного усилителя, и выход нелинейного звена с зоной ограничения является выходом устройства для измерения ускорений.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2005 |
|
RU2279094C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190858C1 |
| Акселерометр | 1977 |
|
SU742801A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2098833C1 |
| US 4932261 A, 12.06.1990. | |||

