Изобретение относится к измерительной технике и может быть использовано для коррекции статических характеристик измерительных преобразователей давления, силы, углового перемещения и других физических величин.
Нелинейность статической характеристики измерительного преобразователя, его чувствительность к влияющим на процесс измерения факторам может существенно искажать получаемую с него информацию, поэтому для коррекции статической характеристики используют различные способы.
Известен способ коррекции статической характеристики измерительного преобразователя, основанный на аппроксимации функции, обратной к статической характеристике преобразователя, с помощью степенного полинома с точностью, превышающей точность преобразования [1].
Недостатком известного способа является необходимость учета нелинейности и чувствительности к влияющим факторам всех операций, что приводит к усложнению аппроксимации обратной функции и ее последующей реализации.
В качестве прототипа заявляемого способа выбран способ коррекции нелинейности статической характеристики измерительного преобразователя, имеющей вид Z=f(X), который основан на использовании компенсационного преобразования [2]. Он заключается в том, что преобразуют измеряемую физическую величину X посредством прямой функции измерительного преобразователя F0 в величину Y, вычитают из нее компенсирующую однородную величину Yк, производят преобразование величины некомпенсации ΔY=Y-Yк, преобразуют полученную величину в величину Z, осуществляют с помощью функции F1 обратное преобразование величины Z в величину Yк, однородную величине Y, и производят сравнение величин Y и Yк.
Устройство для осуществления указанного способа включает преобразователь физической величины X в величину Y, связанный своим выходом с неинвертирующим входом устройства сравнения, выход которого подсоединен ко входу преобразователя некомпенсации, выходом связанного со входом преобразователя входного сигнала в величину Z, выход которого подключен ко входу обратного преобразователя величины Z в величину Ук, однородную величине Y, связанного своим выходом с инвертирующим входом устройства сравнения [2].
Недостатком указанного способа и устройства является зависимость погрешности измерения от нелинейности и чувствительности к влияющим факторам первичного и обратного преобразования, что приводит к недостаточной линейности статической характеристики измерительного преобразователя и ее неинвариантности к факторам, влияющим на процесс измерения.
Задача, решаемая изобретением, - повышение линейности статической характеристики измерительного преобразователя и обеспечение ее инвариантности к факторам, влияющим на процесс измерения.
Указанная задача решается тем, что в способе коррекции статической характеристики измерительного преобразователя, имеющей вид Z=f(X), в котором физическую величину X посредством функции F0 преобразуют в величину Y, вычитают из нее компенсирующую однородную величину Yк, производят преобразование величины некомпенсации ΔY=Y-Yк, преобразуют полученную величину в величину Z и осуществляют с помощью функции F1 преобразование величины Z в величину Yх, в качестве Yк используют величину, полученную в результате параметрического преобразования Yк=F2(Yх, Θ), осуществляемого с учетом факторов Т, влияющих на процесс измерения физической величины X, при этом F2 представляет собой математическую модель преобразования Yx в Yк, выраженную в виде:
F2=f[F0, F1],
при этом параметры Θ функции F2 определяются путем задания известных значений измеряемой физической величины X и факторов Т, измерения текущего значения Z, вычисления разности между текущим значением Z и соответствующим значением по номинальной характеристике Zн=Fн(X), интегрирования разности ΔZ=Z-Zн по времени и использования ΔZ для регулирования параметров Θ функции F2 с целью сведения разности ΔZ к нулю, а в качестве преобразования некомпенсации ΔY используют операцию интегрирования по времени.
Устройство для осуществления способа коррекции статической характеристики измерительного преобразователя, имеющей вид Z=f(X), включающее преобразователь физической величины X в величину Y, связанный своим выходом с неинвертирующим входом устройства сравнения, выход которого подсоединен к входу преобразователя некомпенсации, выходом связанного с входом преобразователя входного сигнала в величину Z, выход которого подключен к входу обратного преобразователя величины Z в величину Yх, снабжено блоком математической модели преобразования величины Ух в величину Yк, однородную величине Y, содержащим n входов, при этом первый вход подсоединен к выходу обратного преобразователя, остальные (n-1) входов подключены к датчикам влияющих факторов Т, выход связан с инвертирующим входом устройства сравнения, а преобразователь некомпенсации выполнен в виде интегратора.
Преобразователь физической величины X в величину Y выполнен в виде первичного преобразователя физической величины X, соединенного выходом с входом первого аналого-цифрового преобразователя; преобразователь входного сигнала в величину Z выполнен в виде цифроаналогового преобразователя, обратный преобразователь выполнен в виде второго аналого-цифрового преобразователя, а блок математической модели реализован на микропроцессоре.
На чертеже схематически изображено устройство, с помощью которого реализуется заявляемый способ. Оно представляет собой астатическую систему и включает преобразователь 1 измеряемой физической величины X в величину Y, состоящий из первичного преобразователя 2 и первого аналого-цифрового преобразователя (АЦП) 3, выход которого подсоединен к неинвертирующему входу устройства сравнения 4, преобразователь некомпенсации, выполненный в виде интегратора 5, связанного входом с выходом устройства сравнения 4, а выходом - со входом цифро-аналогового преобразователя (ЦАП) 6, выход которого является выходом заявляемого устройства. Выход ЦАП 6 связан с входом второго АЦП 7, выходом соединенного с первым входом блока математической модели преобразования величины Yх в величину Yк, реализованного на микропроцессоре 8, выход которого подключен к инвертирующему входу устройства сравнения 4, а остальные (n-1) входов подсоединены к выходам датчиков 9 факторов, влияющих на процесс измерения физической величины X. В качестве таких факторов могут выступать, например, температура, атмосферное давление, влажность и др.
Отметим, что устройство сравнения 4, АЦП 3 и 7, интегратор 5, ЦАП 6 и датчик температуры могут быть выполнены на базе микроконвертера ADUC816 фирмы Analog Devices.
Способ согласно изобретению осуществляется следующим образом. Измерительный преобразователь 1 измеряет физическую величину X, например давление, и преобразует ее посредством прямой функции измерительного преобразователя F0 в цифровой выходной сигнал Y, поступающий с выхода АЦП 3 на неинвертирующий вход устройства сравнения 4 и далее на вход интегратора 5. С выхода интегратора 5 сигнал поступает на вход ЦАП 6, который преобразует цифровой сигнал в аналоговый выходной сигнал устройства, например в ток или напряжение. С выхода ЦАП 6 сигнал поступает на вход АЦП 7, в котором с помощью функции F1 осуществляется обратное преобразование Z в величину Yx, однородную по своей природе величине Y. Далее сигнал (величина Yx) поступает на первый вход микропроцессора 8, на остальные входы которого подаются выходные сигналы датчиков 9. Алгоритм работы микропроцессора 8 реализует математическую модель преобразования Yx в Yк - величину, подаваемую на инвертирующий вход устройства сравнения 4, и описывается параметрическим преобразованием F2.
В устройстве сравнения 4 происходит сравнение сигналов Y и Yк. Величина ΔY=Y-Yк в статическом режиме при использовании в качестве преобразователя некомпенсации интегратора равна нулю, т.е. Y=Yк или

В том случае, если функция F2 определена так, что функция преобразования величины Z в величину Yк имеет такой же вид, как и функция преобразования входной физической величины X в величину Y=F0 (X), статическая характеристика измерительного преобразователя Z=f (X) приобретает линейный вид Z=KX, где К - коэффициент пропорциональности.
Искомая функция F2 является параметрической. Ее параметры Θ определяются путем задания известных значений измеряемой физической величины X и дополнительных влияющих факторов Т, измерения текущего значения Z, получения разности между текущим значением Z и соответствующим значением по номинальной характеристике ZH=FH(X), интегрирования разности ΔZ=Z-ZH по времени и использования ΔZ для управления регулировкой параметров функции F2 с целью сведения этой разности к нулю.
В качестве F2 можно использовать кусочно-линейную аппроксимирующую функцию, аппроксимацию степенным полиномом, сплайн-аппроксимацию и др. Например, при использовании кусочно-линейной функции параметрами ее i-го сегмента являются мультипликативный коэффициент Аi и аддитивный коэффициент Bi, т.е. Θ={Ai, Вi}. Настройка параметров модели в этом случае происходит следующим образом. При X=Х0=0 значение аддитивного коэффициента первого сегмента В1 равно Y0. Далее на вход измерительного преобразователя подают известное значение величины X=X1, измеряют текущее значение Z=Z1 образцовым прибором, сравнивают его со значением, вычисленным по номинальной характеристике, в качестве которой в большинстве случаев используется линейная функция Zн1=KX1, интегрируют по времени полученное значение некомпенсации ΔZ1=Z1-Zн1 и используют значение на выходе интегратора в качестве мультипликативного коэффициента первого сегмента. По завершении переходного процесса стабилизированное значение на выходе интегратора принимается за А1. Далее на вход измерительного преобразователя подают следующее известное значение величины X=Xi, измеряют текущее значение Z=Zi образцовым прибором, сравнивают его со значением, вычисленным по номинальной характеристике Zнi=КХi, интегрируют по времени полученное значение некомпенсации ΔZi=Zi-Zнi и используют значение на выходе интегратора в качестве Ai, а текущий аддитивный коэффициент вычисляют по формуле:

По завершении переходного процесса на выходе интегратора мультипликативный и аддитивный коэффициенты i-го сегмента считаются настроенными и далее осуществляется настройка (i+1)-го сегмента.
Для обеспечения инвариантности измерительного преобразователя к воздействию влияющего фактора, например температуры Т, необходимо получить семейство кусочно-линейных функций, которое используется в качестве модели F2. В этом случае коэффициенты сегментов каждой из них настраиваются по описанному выше алгоритму для каждого из определенного числа известных значений температуры Tj, воздействующей на измерительный преобразователь, например, в камере тепла и холода.
Коэффициенты модели при значениях температуры, не являющихся узловыми, определяются микропроцессором измерительного преобразователя исходя из пропорции:


где  ,
,  ,
,  ,
,  - настроенные параметры i-го сегмента на j-й и (j+1)-й температурах.
- настроенные параметры i-го сегмента на j-й и (j+1)-й температурах.
Определение параметров Θ по описанному выше алгоритму автоматически учитывает функции преобразования F0 и F1, что позволяет записать F2 в виде:
F2=f[F0, F1].
Необходимость вышеуказанной процедуры определения параметров Θ функции F2 объясняется следующим.
Представим функцию F2 в виде

где (•)-1 - символ обратной функции.
Подставим (3) в (1):
F0(X)=F2[F1(Z)]=F0({F1[F1(Z)]}-1)=F0(Z).
Полученное тождество доказывает, что выражение (3) определяет вид функции F2.
На практике функции F0 и F1 могут быть определены с погрешностями  и
и  где ΔF0 и ΔF1 - погрешности оценивания. Поэтому определение F2 по формуле (3) на основании оценок вносит большую погрешность в измерение физической величины X по сравнению с определением функции F2 согласно заявляемому способу.
где ΔF0 и ΔF1 - погрешности оценивания. Поэтому определение F2 по формуле (3) на основании оценок вносит большую погрешность в измерение физической величины X по сравнению с определением функции F2 согласно заявляемому способу.
Заявляемые способ и устройство использовались для коррекции статических характеристик измерительных преобразователей типа «Сапфир-22» абсолютного, относительного и дифференциального давления в диапазоне рабочих температур от -40°С до +80°С и позволили значительно повысить линейность статической характеристики упомянутых преобразователей давления и ее инвариантность к различным факторам, влияющим на процесс измерения.
ЛИТЕРАТУРА
1. Д.Шапонич, А.Жигич. Коррекция пьезорезистивного датчика давления с использованием микроконтроллера. Приборы и техника эксперимента, 2001 г., №1, С.54-60.
2. П.П.Орнатский. Автоматические измерения и приборы. Киев: Вища школа, 1980, С.107-109 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК КРУПНОГАБАРИТНЫХ АНТЕНН ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ БЕЗ ИХ НЕПОСРЕДСТВЕННЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2541206C2 |
| СПОСОБ ФОРМИРОВАНИЯ СТАТУСА РЕЗУЛЬТАТА ИЗМЕРЕНИЙ ИНТЕЛЛЕКТУАЛЬНОГО ДАТЧИКА | 2013 |
|
RU2540449C1 |
| Способ и устройство автоматической юстировки зеркальных телескопов | 2017 |
|
RU2690723C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
| СПОСОБ ЛИНЕАРИЗАЦИИ ГРАДУИРОВОЧНОЙ ХАРАКТЕРИСТИКИ ПЬЕЗОРЕЗОНАНСНОГО ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ С ПЕРЕМЕННЫМ МЕЖЭЛЕКТРОДНЫМ ЗАЗОРОМ | 1996 |
|
RU2127496C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ | 1994 |
|
RU2115089C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 1995 |
|
RU2105319C1 |
| ФИЛЬТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1998 |
|
RU2157046C2 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 2011 |
|
RU2463589C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ | 2012 |
|
RU2529016C1 |
Изобретение относится к измерительной технике и может быть использовано для коррекции статических характеристик измерительных преобразователей давления, силы, углового перемещения и других физических величин. Использование изобретения позволяет получить технический результат - повысить линейность статической характеристики измерительного преобразователя и обеспечить ее инвариантность к факторам, влияющим на процесс измерения. Способ коррекции статической характеристики измерительного преобразователя, имеющей вид Z=f(X), заключается в том, что физическую величину X преобразуют посредством функции F0 в величину Y, вычитают из нее компенсирующую однородную величину Ук, производят преобразование величины некомпенсации ΔY=Y-Yk, преобразуют полученную величину в величину Z, осуществляют с помощью функции F1 преобразование величины Z в величину Yх, и преобразуют полученную величину Ух путем параметрического преобразования Yк=F2(Yх, Θ), при этом преобразование F2, осуществляемое с учетом факторов Т, влияющих на процесс измерения физической величины X, представляет собой математическую модель преобразования Yx в Yк и выражается в виде: F2=f[F0, F1]. Устройство для коррекции статической характеристики измерительного преобразователя включает преобразователь (1) измеряемой физической величины X в величину Y, состоящий из первичного преобразователя (2) и первого АЦП (3), устройство сравнения (4), интегратор (5), ЦАП (6), АЦП (7), блок математической модели (8), реализованный на микропроцессоре, и датчики (9) факторов, влияющих на процесс измерения физической величины X. 2 н. и 1 з.п. ф-лы, 1 ил.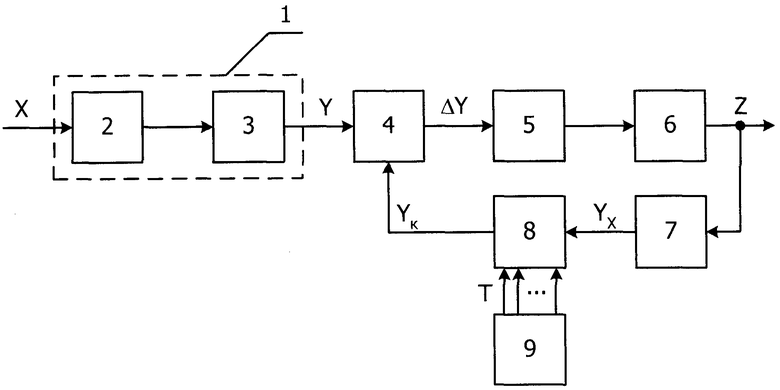
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2130194C1 |
| Устройство для автоматической коррекции статической характеристики измерительного преобразователя, охваченного обратной связью | 1978 |
|
SU712788A1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 1998 |
|
RU2162970C2 |

