Изобретение относится к геофизике, а именно к устройствам для проведения геофизических поисково-разведочных работ путем электромагнитного зондирования земной коры, в частности, на основе измерений вариаций составляющих магнитотеллурического поля Земли.
В настоящее время при геофизическом изучении структуры земной коры, в том числе с целью поиска нефти и газа, широко применяются устройства для электромагнитных зондирований. Работа указанных устройств основана на регистрации вариаций электрической и магнитной составляющих электромагнитного поля низкочастотного диапазона, которые зависят от электрических свойств подстилающей среды.
Среди рассматриваемых устройств весьма перспективными являются устройства для магнитотеллурического зондирования, при котором регистрируют вариации естественного низкочастотного электромагнитного поля Земли (магнитотеллурического поля), в связи с чем при проведении работ этим методом не используются какие-либо дополнительные внешние источники электромагнитного поля.
Известно устройство, предназначенное для магнитотеллурического зондирования земной коры [SU 1270733].
Рассматриваемое устройство содержит датчики электрического и магнитного поля и регистратор, в котором помещены узел приема и преобразования измеряемых сигналов в цифровую форму, включающий аналого-цифровой преобразователь и узел управления и обработки данных, содержащий запоминающее и регистрирующее устройства, а также совокупность элементов, управляющих работой указанных устройств, включающую задающий генератор, счетчик импульсов, переключатели, коммутирующие устройства, логические схемы И и ИЛИ.
На аналого-цифровой преобразователь поочередно подаются сигналы от датчиков электрического и магнитного полей. С выхода указанного преобразователя коды сигналов поочередно подаются на регистрирующее устройство, где записываются на магнитном носителе. При этом в регистрирующем устройстве также записываются номер - идентификатор полного кадра информации и бортовое время, являющееся номером полного кадра, что повышает надежность расшифровки полученной информации.
Развитие микропроцессорной техники привело к возникновению нового поколения устройств для проведения электромагнитного зондирования земной коры, основой которых является цифровой регистратор, обеспечивающий оцифровку и микропроцессорную обработку сигналов, поступающих от датчиков электромагнитного поля, а также хранение значительного объема полученной информации в цифровом виде во встроенной памяти.
Так, в частности, известна магнитотеллурическая система [US 6191587], которая содержит множество датчиков электрического поля, по меньшей мере, один датчик магнитного поля и ряд регистраторов, на входы которых поступают сигналы от датчиков электрического поля и/или магнитного поля. Регистраторы осуществляют обработку оцифрованных входных сигналов с помощью микропроцессоров и хранят полученные данные во встроенной памяти. При этом регистраторы имеют каналы связи с персональным компьютером типа "Notebook", на экране которого могут быть отображены полученные данные, а также канал связи с системой навигационного позиционирования GPS для определения координат и точного времени, а также синхронизации работы аппаратуры.
В качестве ближайшего аналога авторами выбрано устройство для проведения электромагнитного зондирования земной коры [RU 95121907].
Рассматриваемое устройство включает датчики, предназначенные для измерения компонент электромагнитного поля, микропроцессорный регистратор, а также подключаемый к нему персональный компьютер типа "Notebook", на экране которого могут быть отображены регистрируемые данные.
Основные узлы регистратора могут быть объединены в два функциональных модуля: многоканальный модуль приема и преобразования аналоговых сигналов и модуль управления и обработки данных.
Многоканальный модуль приема и преобразования аналоговых сигналов содержит четыре канала, каждый из которых подключен к выходу одного из датчиков электрического и магнитного полей и включает фильтр низкой частоты, аналоговый усилитель и аналого-цифровой преобразователь. Модуль управления и обработки данных содержит связанные друг с другом математический процессор, осуществляющий арифметическую обработку оцифрованных сигналов, память данных и управляющий микроконтроллер с памятью программ.
Кроме того, регистратор содержит четыре устройства выявления перегрузок аналого-цифровых преобразователей, позволяющих определить наличие в измеряемых сигналах импульсов с амплитудой, превышающей допустимый для аналого-цифрового преобразователя уровень. В составе указанных устройств использованы четыре неоновые сигнальные лампы, каждая из которых соответственно подключена к выходу одного из аналого-цифровых преобразователей. Включение этих ламп указывает на наличие в измеряемом сигнале указанных мощных импульсов. Выход каждой лампы связан с модулем управления и обработки данных, при этом при выявлении мощного импульса обработка сигналов математическим процессором прекращается в течение заданного времени задержки.
Регистратор также содержит узел визуального контроля уровня измеряемого сигнала, включающий четыре пиковых детектора и два стрелочных прибора.
Рассматриваемое устройство является недостаточно удобным в использовании, поскольку оно не содержит встроенного средства визуализации собираемых регистратором данных, а указанная визуализация осуществляется при подключении к регистратору дополнительного средства - компьютера типа "Notebook". При этом для слежения за уровнем исследуемого сигнала применяются стрелочные приборы, которые не могут обеспечить высокую точность визуального контроля.
Использование неоновых сигнальных ламп в составе устройств выявления перегрузок аналого-цифровых преобразователей не обеспечивает высокую оперативность и достоверность выявления мощных импульсов, что может привести к снижению точности получаемых данных.
В рассматриваемом устройстве не предусмотрены анализ и компенсация постоянной составляющей (напряжения постоянного тока) входных сигналов, поступающих от датчиков электрического и магнитного поля, что снижает допустимый диапазон усиливаемых аналоговым усилителем сигналов и может привести к искажению полученных данных. Кроме того, отсутствие возможности анализа постоянной составляющей сигнала с последующей ее компенсацией не позволяет с помощью рассматриваемого устройства без дополнительного специального частотного фильтра обрабатывать сигналы, в которых присутствует практически только постоянная составляющая, то есть сигналы, близкие к постоянному току. Это также приводит к снижению достоверности получаемых данных.
Задачей заявляемого изобретения является повышение точности и достоверности полученных данных, а также повышение удобства пользования.
Сущность изобретения заключается в том, что в устройстве для проведения электромагнитного зондирования земной коры, включающем регистратор, содержащий многоканальный модуль приема и преобразования аналоговых сигналов, каждый канал которого включает фильтр низких частот, аналоговый усилитель и аналого-цифровой преобразователь, а вход каждого из каналов которого предназначен для соединения регистратора с одним из датчиков компонент магнитного и электрического полей, модуль управления и обработки данных, содержащий связанные друг с другом математический процессор, память данных и управляющий микроконтроллер с памятью программ, при этом регистратор содержит устройства выявления перегрузок аналого-цифровых преобразователей, вход каждого из которых связан с выходом соответствующего аналого-цифрового преобразователя, а выход связан с модулем управления и обработки данных, согласно изобретению регистратор дополнительно содержит узел встроенных экрана и клавиатуры, связанный шиной обмена информацией с управляющим микроконтроллером с памятью программ модуля управления и обработки данных, в регистраторе в качестве устройств выявления перегрузок аналого-цифрового преобразователя использованы программные устройства, включенные в состав математического процессора, выход каждого из которых связан шиной обмена информацией с памятью данных и с управляющим микроконтроллером с памятью программ, в регистраторе в качестве аналоговых усилителей в каналах модуля приема и преобразования аналоговых сигналов использованы дифференциальные операционные усилители с управляемым входом, при этом регистратор содержит включенные в состав математического процессора программные устройства вычисления постоянной составляющей сигнала в каналах модуля приема и преобразования аналоговых сигналов, вход каждого из указанных устройств связан шиной обмена информацией с управляющим микроконтроллером с памятью программ, а выход каждого из указанных устройств связан через цифроаналоговый преобразователь с управляющим входом дифференциального операционного усилителя, расположенного в соответствующем канале модуля приема и преобразования аналоговых сигналов.
В частном случае выполнения заявляемое устройство дополнительно содержит выносной предусилитель, входы которого соединены с выходами датчиков компонент электрического поля, а выходы соединены с входами каналов модуля приема и преобразования аналоговых сигналов, предназначенными для соединения регистратора с датчиками компонент указанного поля.
В частном случае выполнения входящий с состав заявляемого устройства регистратор дополнительно содержит включаемые фильтры промышленной частоты, каждый из которых установлен в канале модуля приема и преобразования аналоговых сигналов после дифференциального операционного усилителя и перед аналого-цифровым преобразователем.
В частном случае выполнения входящий с состав заявляемого устройства регистратор дополнительно содержит связанный с модулем приема и преобразования аналоговых сигналов модуль позиционирования и сверки времени, при этом указанный модуль включает соединенные друг с другом узел связи с навигационной системой позиционирования и узел тактового генератора, выход которого соединен с тактовыми входами аналого-цифровых преобразователей.
В частном случае выполнения входящий с состав регистратора модуль управления и обработки данных дополнительно содержит стандартный канал связи с персональной ЭВМ.
Наличие регистратора, входящего в состав заявляемого устройства, обеспечивает возможность микропроцессорной обработки поступающих от датчиков магнитного и электрического полей сигналов, а также сбор и хранение в памяти регистратора полученных данных электромагнитного зондирования.
Многоканальный модуль приема и преобразования аналоговых сигналов, количество каналов которого соответствует количеству измеряемых компонент электромагнитного поля, обеспечивает в каждом канале фильтрацию входного аналогового сигнала с целью пропускания сигналов, лежащих в исследуемом низкочастотном диапазоне частот, усиление аналогового сигнала и преобразование его в цифровую форму.
Модуль управления и обработки данных осуществляет регистрацию в цифровом виде информации, собираемой с выходов многоканального модуля приема и преобразования аналоговых сигналов, математическую обработку указанной информации, в том числе реализует в математическом процессоре амплитудно-фазовые измерения компонент электрического и магнитного полей, а также осуществляет хранение информации в памяти данных, в частности, в энергонезависимой Flash памяти.
Заявляемое устройство обладает рядом существенных конструктивных особенностей.
Наличие в регистраторе узла встроенных экрана и клавиатуры, связанного шиной обмена информации с управляющим микроконтроллером с памятью программ модуля управления и обработки данных, обеспечивает удобство автономного управления с помощью клавиатуры узлами и элементами, входящими в состав заявляемого устройства, а также визуализацию на встроенном экране регистратора измеряемых сигналов и полученных данных.
Использование в регистраторе в качестве устройств выявления перегрузок аналого-цифрового преобразователя включенных в состав математического процессора и работающих в постоянном режиме программных устройств, вход каждого из которых связан с выходом соответствующего аналого-цифрового преобразователя, а выход связан шиной обмена информацией с памятью данных и с управляющим микроконтроллером с памятью программ, обеспечивает повышение оперативности и достоверности выявления мощных импульсных сигналов помехи, что способствует увеличению точности измерения исследуемых параметров и достоверности полученных данных,
Использование в регистраторе в качестве аналоговых усилителей дифференциальных операционных усилителей с управляемым входом, а также наличие в регистраторе включенных в состав математического процессора программных устройств вычисления постоянной составляющей сигнала в каналах модуля приема и преобразования аналоговых сигналов, вход каждого из которых связан шиной обмена информацией с управляющим микроконтроллером с памятью программ, а выход связан через цифроаналоговый преобразователь с управляющим входом соответствующего дифференциального операционного усилителя, позволяют определить величину постоянной составляющей измеряемых сигналов и включить режим ее компенсации. Указанная возможность расширяет диапазон измеряемых сигналов, а также позволяет без дополнительных специальных частотных фильтров обрабатывать сигналы, лежащие в диапазоне сверхнизких частот, близкие к постоянному току, что также способствует повышению достоверности полученных данных.
Таким образом, заявляемое устройство обеспечивает повышение точности и достоверности полученных данных, а также повышение удобства пользования.
В случае, когда заявляемое устройство дополнительно содержит выносной предусилитель, который может быть удален на значительное расстояние от регистратора, обеспечивается повышение точности измерения компонент электрического поля за счет исключения влияния локальных помех в зоне расположения регистратора, что особенно важно при проведении мониторинговых работ.
В случае наличия в регистраторе включаемых фильтров промышленной частоты, каждый из которых установлен в канале модуля приема и преобразования аналоговых сигналов после дифференциального операционного усилителя и перед аналого-цифровым преобразователем, обеспечивается повышение точности измерения за счет исключения влияния на получаемые результаты сигналов от помехи промышленной частоты.
В случае, когда регистратор дополнительно содержит связанный с модулем приема и преобразования аналоговых сигналов модуль позиционирования и сверки времени, при этом указанный модуль включает соединенные друг с другом узел связи с навигационной системой позиционирования и узел тактового генератора, выход которого соединен с тактовыми входами аналого-цифровых преобразователей, обеспечивается возможность определения с помощью указанной системы позиционирования, в частности, системы навигационного позиционирования GPS, координат точек наблюдения и точного времени измерения компонент электромагнитного поля, а также синхронизация работы всех элементов и узлов регистратора, а в случае работы регистратора в сети регистраторов синхронизация всех регистраторов входящих в сеть.
В случае, когда модуль управления и обработки данных регистратора дополнительно содержит стандартный канал связи с персональной ЭВМ, оказывается возможным с использованием специальной программы управлять работой регистратора с помощью персональной ЭВМ, а также осуществлять визуализацию полученной информации на ее экране.
На чертеже представлена функциональная схема заявляемого устройства.
Устройство содержит регистратор, включающий четырехканальный модуль 1 приема и преобразования аналоговых сигналов, входы 2 и 3 двух каналов которого предназначены для соединения регистратора с датчиками составляющих магнитного поля, а входы 4 и 5 двух других каналов которого предназначены для соединения регистратора с датчиками составляющих электрического поля.
Каждый канал модуля 1 включает фильтр 6 низкой частоты, аналоговый усилитель 7, в качестве которого использован дифференциальный операционный усилитель с управляемым входом, и аналого-цифровой преобразователь 8. Кроме того, в каждом канале помещен включаемый оператором фильтр 9 промышленной частоты.
Регистратор также содержит узел 10 встроенных экрана и клавиатуры и модуль 11 управления и обработки данных, который включает связанные друг с другом шинами обмена информацией математический процессор 12, память 13 данных и управляющий микроконтроллер 14 с памятью программ 15. Узел 10 связан шиной обмена информацией с управляющим микроконтроллером 14 с памятью программ 15 модуля 11.
В составе математического процессора 12 имеются программные устройства 16 выявления перегрузок аналого-цифровых преобразователей, вход каждого из которых связан с выходом соответствующего аналого-цифрового преобразователя 8, а выход связан шинами обмена информацией с памятью 13 данных и с управляющим микроконтроллером 14 с памятью 15 программ.
В состав математического процессора 12 также включены программные оператором устройства 17 вычисления постоянной составляющей сигнала в каналах модуля 1. Вход каждого из устройств 17 связан шиной обмена информацией с управляющим микроконтроллером 14 с памятью 15 программ, а выход каждого из рассматриваемых устройств связан через цифроаналоговый преобразователь 18 с управляющим входом дифференциального операционного усилителя 7, расположенного в соответствующем канале модуля 1.
Модуль 11 содержит узел связи с персональной ЭВМ, включающий управляющий контроллер 19, в частности контроллер сети Ethernet, подключенный к стандартному каналу 20 связи, в частности к кабелю Ethernet.
Кроме того, регистратор содержит связанный с модулем 1 модуль 21 позиционирования и сверки времени, который включает соединенные друг с другом узел 22 связи с навигационной системой позиционирования, в частности с приемником спутниковой навигационной системы GPS, и узел 23 тактового генератора, обеспечивающего тактирование всех узлов и элементов регистратора. Выход узла 23 соединен с тактовыми входами аналого-цифровых преобразователей 8.
Заявляемое устройство также содержит выносной предусилитель 24, входы которого соединены с выходами датчиков составляющих электрического поля, а выходы соединены с входами каналов 4 и 5 модуля 1.
Устройство работает следующим образом.
На входы 2 и 3 модуля 1 регистратора поступают сигналы с выхода датчиков составляющих магнитного поля, а на входы 4 и 5 модуля 1 поступают сигналы с выхода предусилителя 24, на входы которого поступают сигналы с выхода датчиков составляющих электрического поля. В каждом канале модуля 1 входной сигнал после прохождения через фильтр низких частот 6 усиливается усилителем 7 и преобразуется в цифровую форму в аналого-цифровом преобразователе 8. При наличии вблизи точки наблюдения промышленных помех осуществляется дополнительная фильтрация измеряемых сигналов с помощью фильтров 9, которые включаются, в частности, путем задания оператором соответствующего режима с помощью клавиатуры.
С выхода каждого преобразователя 8 оцифрованные сигналы подаются в модуль 11, где они поступают на вход соответствующего программного устройства 16 в составе математического процессора 12. В устройствах 16 производится анализ собираемых с частотой оцифровки входных сигналов, при этом осуществляется выявление мощных импульсных сигналов помехи, значения которых выходят за заданные пределы, в частности, за рабочий диапазон преобразователей 8, а также программная отбраковка указанных сигналов помехи. Отбраковка осуществляется путем маркировки сигналов помехи специальным кодом. Данные, поступающие с выхода устройств 16, накапливаются в памяти 13 данных, а также обрабатываются в математическом процессоре 12, где вычисляются амплитудно-фазовые характеристики компонент электромагнитного поля. Полученные данные и измеряемые параметры визуализируются на встроенном экране регистратора. При этом мощные импульсные сигналы помехи, отмеченные специальным кодом, распознаются программой интерпретации данных, имеющейся в памяти 15 программ, изымаются из обработки и не визуализируются на экране регистратора.
В случае, когда в измеряемых сигналах выявляется наличие постоянной составляющей, ее значение вычисляется в математическом процессоре 12. При наличии постоянной составляющей включаются устройства 17 и производится компенсация постоянной составляющей сигнала. Указанная компенсация осуществляется путем подачи на управляющий вход соответствующего усилителя 7 сигнала, поступающего с выхода соответствующего устройства 18, равного по амплитуде и противоположного по знаку определенной постоянной составляющей сигнала. Компенсационный сигнал преобразуется в аналоговую форму с помощью преобразователя 18.
С помощью модуля 21 осуществляется определение координат точек наблюдения и времени по сигналам, поступающим от навигационной системы позиционирования. Кроме того, осуществляется режим синхронизации времени работы регистратора, в ходе которого производится периодическая регулировка частоты тактового генератора с помощью имеющегося в узле тактового генератора 23 программно-аппаратного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ ЦИФРОВОЙ РЕГИСТРАТОР СИГНАЛОВ | 2016 |
|
RU2616346C1 |
| Беспроводной контроллер датчиков | 2018 |
|
RU2701103C1 |
| Устройство, способ и машиночитаемый носитель для автономной регистрации сейсмических данных | 2024 |
|
RU2836136C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| Устройство для измерения технических характеристик механоэлектрических преобразователей с емкостным выходом и способ измерения коэффициента преобразования по заряду (варианты) | 2023 |
|
RU2797751C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО КОНТРОЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2376564C1 |
| Система и способ для детектирования вибраций, беспроводной передачи, беспроводного приема и обработки данных, принимающий модуль и способ для приема и обработки данных | 2017 |
|
RU2677568C2 |
Изобретение относится к геофизике, а именно к устройствам для проведения электромагнитного зондирования земной коры на основе измерений вариаций составляющих магнитотеллурического поля Земли. Технический результат: повышение точности и достоверности полученных данных, повышение удобства пользования. Сущность: устройство включает регистратор, содержащий многоканальный модуль приема и преобразования аналоговых сигналов, каждый канал которого включает фильтр низких частот, аналоговый усилитель и аналого-цифровой преобразователь. Устройство также включает модуль управления и обработки данных, содержащий связанные друг с другом математический процессор, память данных и управляющий микроконтроллер с памятью программ. Регистратор содержит устройства выявления перегрузок аналого-цифровых преобразователей, выполненные в виде программных устройств, включенных в состав математического процессора. Регистратор также содержит узел встроенных экрана и клавиатуры, связанный шиной обмена информацией с управляющим микроконтроллером с памятью программ модуля управления и обработки данных. В качестве аналоговых усилителей в каналах модуля приема и преобразования аналоговых сигналов использованы дифференциальные операционные усилители с управляемым входом. Регистратор содержит включенные в состав математического процессора программные устройства вычисления постоянной составляющей сигнала в каналах модуля приема и преобразования аналоговых сигналов. Регистратор содержит включенные в состав математического процессора программные устройства вычисления постоянной составляющей сигнала в каналах модуля приема и преобразования аналоговых сигналов. Вход каждого из указанных устройств связан шиной обмена информацией с управляющим микроконтроллером с памятью программ, а выход связан через цифроаналоговый преобразователь с управляющим входом дифференциального операционного усилителя, расположенного в соответствующем канале модуля приема и преобразования аналоговых сигналов. 4 з.п. ф-лы, 1 ил.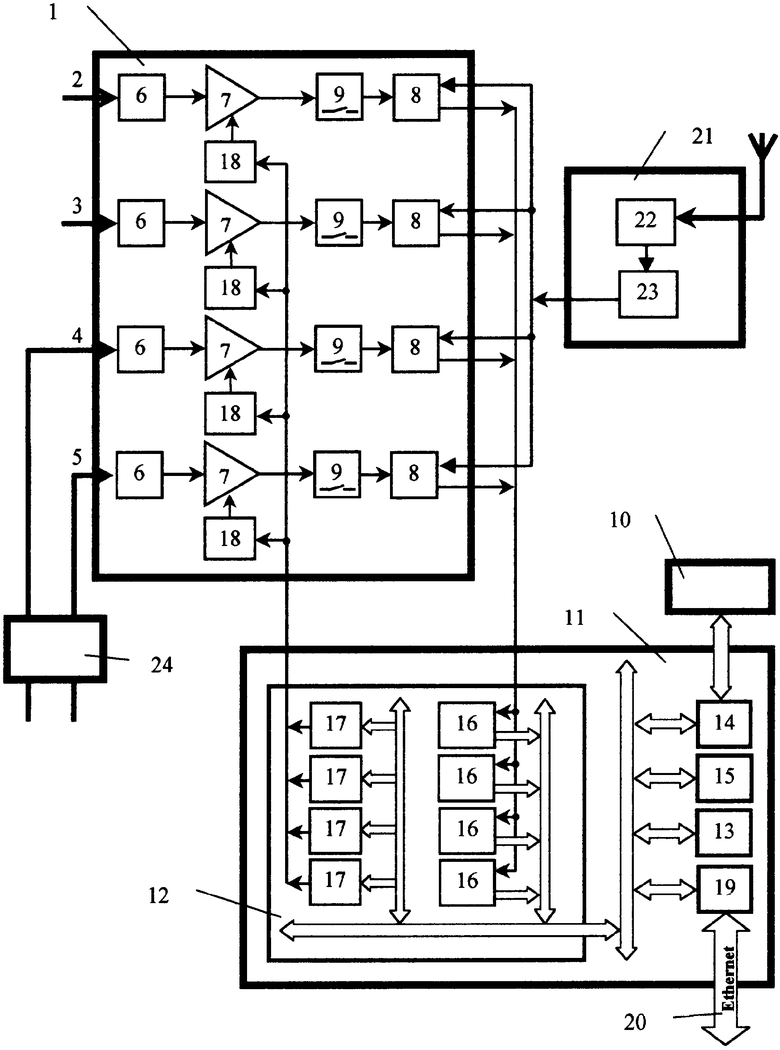
| RU 95121907 А, 27.02.1998 | |||
| Донная магнитотеллурическая станция | 1982 |
|
SU1270733A1 |
| Электроразведочная станция | 1981 |
|
SU976418A1 |
| US 6191587 B1, 20.02.2001 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

