Фи9,1
Изобретение относится к машиностроению, а именно к испытательной технике, и найдет применение., в частности, в процессах испытаний и отладки двухзвенных шарнирных механизмов в обезвешенном состоянии.
Цель изобретения - повышение точности моделирования невесомости за счет исключения влияния сил трения в элементах подвесок стенда и синхронного перемещения каждой подвески в нужном направлении.
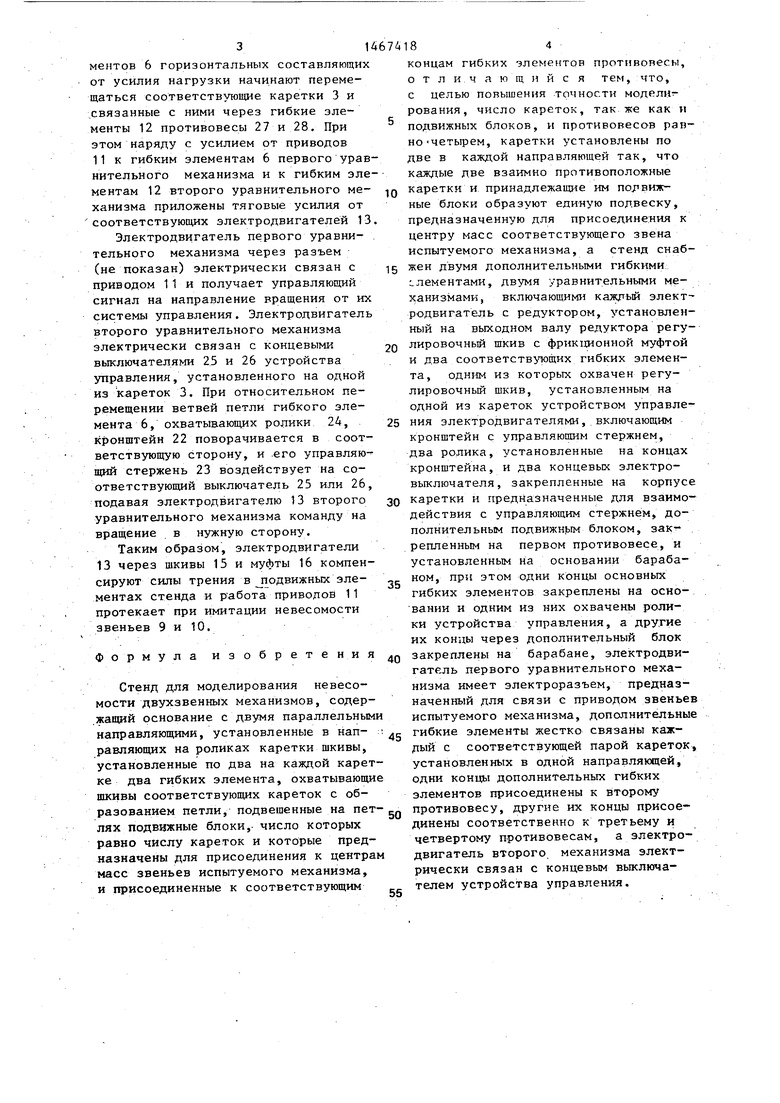
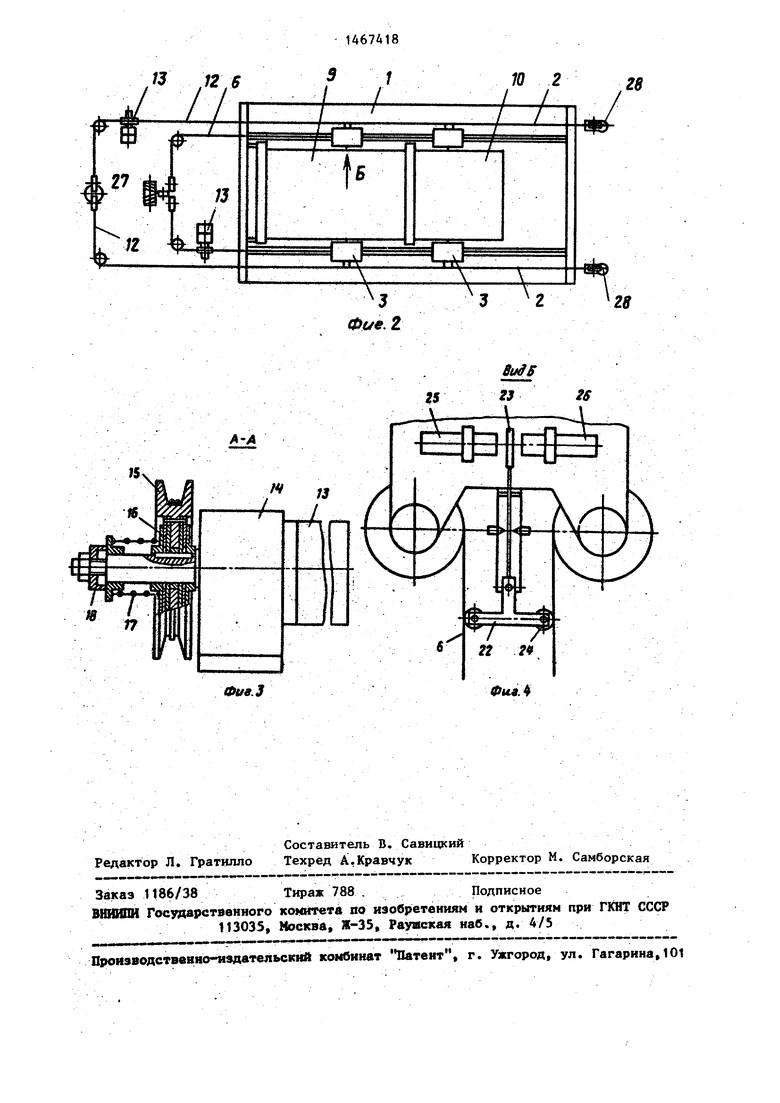
На фиг. 1 показан стенд, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - вид Б на фиг. 2,
Механизм содержит -основание 1 с двумя параллельными прямолинейными направляющими 2, установленные в них четыре каретки 3 с роликами 4, шкивы 5, установленные по два на каждой каретке 3, два основных гибких элемента 6, охватьтающие шкивы 5 кареток 3 с образованием петли, и установленные в каждой петле подвижные блоки 7
Каретки 3 установлены по две в каждой направляющей 2 так, что каждые две взаимно противоположные каретки 3 и принадлежапще им подвижные блоки 7 образуют единую подвеску, предназначенную для присоединения через соединительные элементы 8 к центру масс соответствующего звена 9 или 10 испытываемого механизма. Звенья 9 и 10 соединены между собой и с основанием 1 приводом 11.
Два Дополнительных гибких элемента 12 жестко связаны каждый с соот
0
5
5
0
0
5
кронштейна ролики 24, охваченные соответствующим гибким элементом 6, и два концевых электровыключателя 25 и 26, предназначенные для взаимодействия с управляющим стержнем 23.
Два дополнительных гибких элемента 12 включены в состав второго уравнительного механизма, поэтому один из них охватывает регулировочный шкив 15 второго электродвигателя 23. Одни концы этих гибких элементов 12 присоединены к второму (общему) противовесу 27, а другие их концы при- соединены соответственно к противовесам 28. Электродвигатель 13, вхо- в первый уравнительный механизм и взаимодействующий с гибкими элементами 6, электрически связан через разъем (не показан) с приводом 11 звеньев 9 и 10 испытываемого механизма, а электродвигатель, входящий во второй уравнительный механизм и взаимодействующий с гибкиг и элементами 12, электрически связан с концевыми выключателями 25 и 26,
Стенд работает следующим образом.
Устанавливают звенья 9 и 10 испытываемого механизма на основание 1 и прикрепляют подвижные блоки 7 подвесок, к звеньям 9 и 10 через соединительные элементы 8. Вращая барабан 21, сматывают или наматывают на него гибкие элементы 6.
При этом звенья 9 и 10, подвижные Влоки 7 и противовес 20 занимают исходное положение. Так как масса противовеса равна массе звеньев 9 и 10, а масса противовеса 27 равна сумме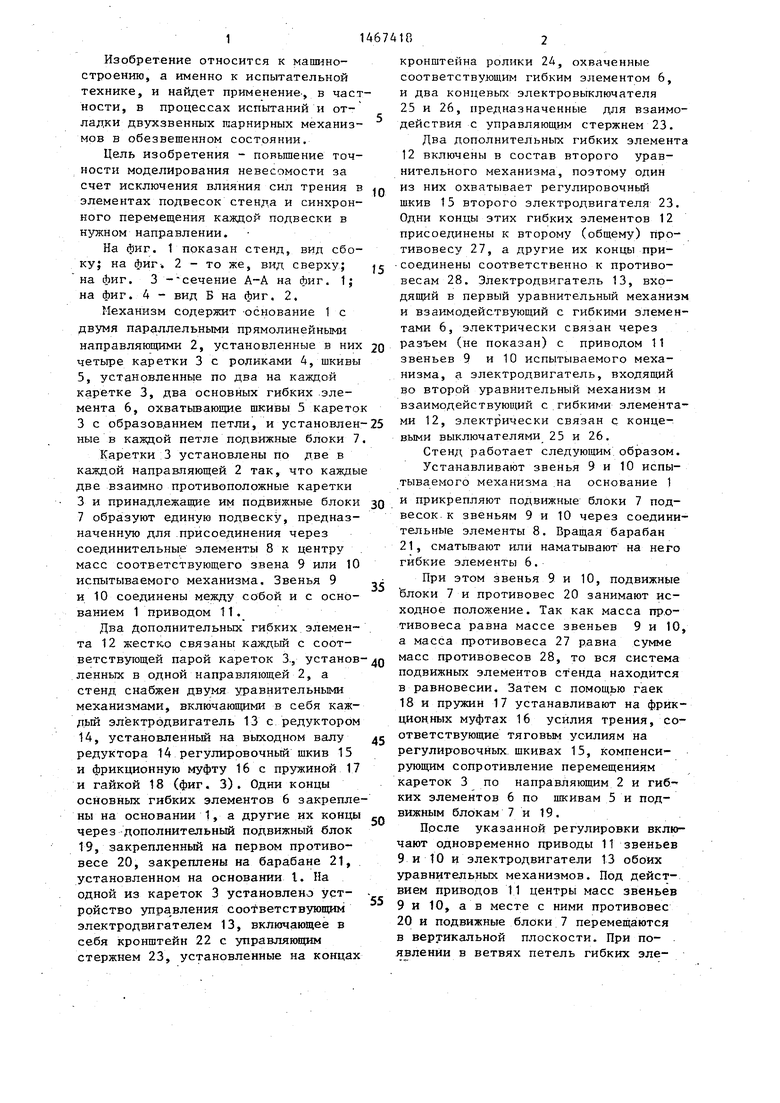
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИМИТАЦИИ НЕВЕСОМОСТИ МЕХАНИЗМОВ С ГИБКОЙ КОНСТРУКЦИЕЙ ЭЛЕМЕНТОВ | 2006 |
|
RU2334970C2 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ МНОГОЗВЕННЫХ МЕХАНИЗМОВ | 2008 |
|
RU2402470C2 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| Стенд для моделирования невесомости двухзвенных механизмов | 1983 |
|
SU1089452A1 |
| Стенд для моделирования невесомсти двухзвенных механизмов | 1976 |
|
SU555314A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| СТЕНД ЦЕПНОГО ПРИВОДА СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2021 |
|
RU2783050C1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2016 |
|
RU2611126C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
Изобретение относится к испытательной технике и может быть использовано, в частности,.в процессах испытаний и наладки двухзвенных шарнирных механизмов в состоянии невесомости. Цель изобретения - повьппение точности моделирования невесомости за счет исключения влияния сил трения в элементах подвесок стенда и синхронного перемещения каждой подвески в нужном направлении. Под действием своих приводов 11 звенья 9 и 10 испытываемого механизма перемещаются в вертикальной плоскости, а их массы уравновешены противовесом 20. Электродвигатели 13 через регулировочные шкивы и фрикционные муфты компенсируют усилия перемещения кареток 3 по направляющим 2 и гибких элементов 6 по шкивам 5 и подвгекным блокам 7. Один электродвигатель управляется от системы управления приводами 11, а второй - от устройства управления, установленного на одной из кареток 3 и реагирующего на усилие натяжения гибких элементов 6. 4 ил. СО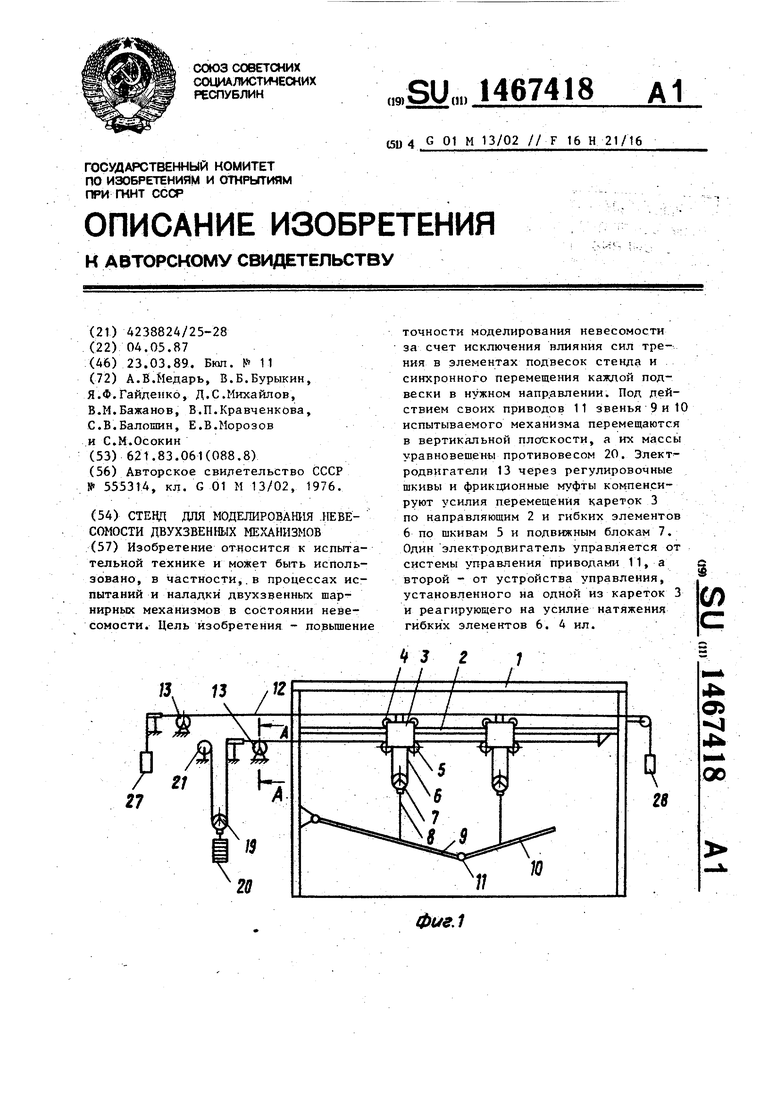
ветствующей парой кареток 3., установ- Q масс противовесов 28, то вся система
ленных в одной направляющей 2, а стенд снабжен двумя уравнительньвуш механизмами, включающими в себя каждый электродвигатель 13 с редуктором 14, установленный на выходном валу редуктора 14 регулировочньй шкив 15 и фрикционную муфту 16 с пружиной 17 и гайкой 18 (фиг. 3). Одни концы основных гибких элементов 6 закреплены на основании 1, а другие их концы через дополнительный подвижный блок 19, закрепленный на первом противовесе 20, закреплены на барабане 21, установленном на основании I. На одной из кареток 3 уетановлено устройство управления соответствз ющим электродвигателем 13, включающее в себя кронштейн 22 с управляющим стержнем 23, установленные на концах
45
50
55
подвижных элементов стенда находится в равновесии. Затем с помощью гаек 18 и пружин 17 устанавливают на фрикционных муфтах 16 усилия трения, соответствующие тяговым усилиям на регулировочных шкивах 15, компенсирующим сопротивление перемещениям кареток 3 по направляющим 2 и гибких элементов 6 по шкивам 5 и подвижным блокам 7 и 19.
Прсле указанной регулировки включают одновременно приводы 11 звеньев 9 и 10 и электродвигатели 13 обоих уравнительных механизмов. Под действием приводов 11 центры масс звеньев 9 и 10, а в месте с ними противовес 20 и подвижные блоки 7 перемещаются в вертикальной плоскости. При по- . явлении в ветвях петель гибких эле5
0
5
подвижных элементов стенда находится в равновесии. Затем с помощью гаек 18 и пружин 17 устанавливают на фрикционных муфтах 16 усилия трения, соответствующие тяговым усилиям на регулировочных шкивах 15, компенсирующим сопротивление перемещениям кареток 3 по направляющим 2 и гибких элементов 6 по шкивам 5 и подвижным блокам 7 и 19.
Прсле указанной регулировки включают одновременно приводы 11 звеньев 9 и 10 и электродвигатели 13 обоих уравнительных механизмов. Под действием приводов 11 центры масс звеньев 9 и 10, а в месте с ними противовес 20 и подвижные блоки 7 перемещаются в вертикальной плоскости. При по- . явлении в ветвях петель гибких эле314674
ентов 6 горизонтальных составляющих т усилия нагрузки начинают перемеаться соответствующие каретки 3 и связанные с ними через гибкие элеенты 12 противовесы 27 и 28, При этом наряду с усилием от приводов 11 к гибким элементам 6 первого уравнительного механизма и к гибким элементам 12 второго уравнительного ме- Q ханизма приложены тяговые усилия от соответствующих электродвигателей 13.
Электродвигатель первого уравнительного механизма через разъем (не показан) электрически связан с 15 приводом 11 и получает управляющий сигнал на направление вращения от их системы управления. Электродвигатель второго уравнительного механизма электрически связан с концевыми 20 выключателями 25 и 26 устройства управления, установленного на одной из кареток 3. При относительном перемещении ветвей петли гибкого элемента 6, охватывающих ролики 24, 25 кронштейн 22 поворачивается в соответствующую сторону, и его управляю- щий стержень 23 воздействует на соответствующий выключатель 25 или 26, подавая электродвигателю 13 второго зо уравнительного механизма команду на вращение в нужную сторону.
Таким образом, электродвигатели 13 через шкивы 15 и муфты 16 компенсируют силы трения в подвижных эле- 5 ментах стенда и работа приводов 11 протекает при имитации невесомости звеньев 9 и 10.
формула изобретения Q
Стенд для моделирования невесомости двухзвенных механизмов, содержащий основание с двумя параллельными направляющими, установленные в нап- : g равляющих на роликах каретки шкивы, установленные по два на каждой каретке два гибких элемента, охватывающие шкивы соответствующих кареток с образованием петли, подвешенные на пет- gg лях подвижные блоки,, число которых равно числу кареток и которые предназначены для присоединения к центрам масс звеньев испытуемого механизма, и присоединенные к соответствующим g
184
концам гибких элементов противовесы, отличающийся тем, что, с целью повышения точности моделирования, число кареток, так ж€ как и подвижных блоков, и противовесов равно -четырем, каретки установлены по две в каждой направляющей так, что каждые две взаимно противоположные каретки и принадлежащие им по/ виж- ные блоки образуют единую подвеску, предназначенную для присоедине:ния к центру масс соответствующего звена испытуемого механизма, а стенд снабжен двумя дополнительными гибкими элементами, двумя уравнительными механизмами, включающими каждый элект родвигатель с редуктором, установленный на выходном валу редуктора регулировочный щкив с фрикционной муфтой и два соответствующих гибких элемента, одн11м из которых охвачен регулировочный шкив, установленным на одной из кареток устройством управления электродвигателями, включающим кронштейн с управляющим стержнем, два ролика, установленные на концах кронштейна, и два концевых электровыключателя, закрепленные на корпусе каретки и предназначенные для взаимодействия с управляющим стержнем, до- полнительньм подвижньгм блоком, закг- репленным на первом противовесе, и установленным на основании барабаном, при этом одни концы основных гибких элементов закреплены на основании и одним из них охвачены ролики устройства управления, а другие их концы через дополнительный блок закреплены на барабане, электродвигатель первого уравнительного механизма имеет электроразъем, предназначенный для связи с приводом звенье испытуемого механизма, дополнительны гибкие элементы жестко связаны каждый с соответствующей парой кареток установленных в одной направляющей, одни концы дополнительных гибких элементов присоединены к второму противовесу, другие их концы присоединены соответственно к третьему и четвертому противовесам, а электродвигатель второго, механизма электрически связан с концевым выключателем устройства управления.
А-А
К
фув.З
Фив.
| Стенд для моделирования невесомсти двухзвенных механизмов | 1976 |
|
SU555314A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
