Изобретение относится к подъемно-транспортным устройствам с ручным приводом, а именно к устройствам для подъема, перемещения и опускания железнодорожных рельсов всех типов и любой длины при ремонтах железнодорожного пути, а также для манипуляций с различным металлопрокатом (таврами, двутаврами и т.п.) при строительных и ремонтных работах.
Известен подъемник рельсов железнодорожного пути, содержащий раму с колесами, грузоподъемным механизмом и рельсовыми захватами, рама выполнена в виде силовой балки с шасси (тележкой), грузоподъемный механизм содержит смонтированные на раме гидроцилиндры подъема рельса, рельсовые захваты установлены на концах силовой балки (RU 2139968, Е01В 33/10, 20.10.99).
Недостатками этого подъемника рельсов являются: низкие эксплуатационные возможности, в частности невозможность работы на обочине железнодорожного полотна из-за отсутствия выносной опоры, низкая производительность из-за использования гидроцилиндров, имеющих ряд эксплуатационных особенностей и недостатков, применение неудобного в работе простейшего рельсового захвата.
Наиболее близким техническим решением к заявляемому изобретению является рельсоподъемник PSR, содержащий раму, размещенную на ее поперечине подвижную каретку с ручным цепным грузоподъемным механизмом и рельсовым захватом, рама выполнена в виде двух треугольных опор, связанных поперечной балкой, грузоподъемный механизм представляет собой лебедку, привод которой содержит приводную рукоять, храповой механизм и редуктор, рельсовый захват состоит из двух шарнирно соединенных полузахватов (Путевые механизмы и машины французских железных дорог. // Железные дороги мира. - 1990. - №10. - С.53).
Недостатками рельсоподъемника PSR являются низкая производительность и неудобство пользования рельсоподъемником из-за отсутствия тележки, что исключает возможность перемещения рельса вдоль железнодорожного пути из-за тактильно-ручного перемещения каретки без использования вспомогательного механизма, что существенно затрудняет работу, из-за применения простейшего рельсового захвата, что усложняет процедуру манипулирования рельсоподъемником, низкая безопасность проведения работ из-за размещения привода грузоподъемного механизма на каретке, что создает травматическую опасность для оператора.
Задача, на решение которой направлено заявляемое изобретение, состоит в расширении эксплуатационных возможностей рельсоподъемника, а также в повышении производительности и безопасности работы и улучшении удобства пользования рельсоподъемником.
Технический результат достигается благодаря тому, что рельсоподъемник, содержащий раму с колесами и опорой, размещенную на поперечине рамы с возможностью перемещения по поперечине каретку с ручным цепным грузоподъемным механизмом, привод которого содержит приводную рукоять, храповой механизм и редуктор, и с рельсовым захватом, состоящим из двух полузахватов, выполнен таким образом, что он снабжен ручным зубчато-цепным механизмом перемещения каретки, установленным на поперечине рамы и имеющим приводную рукоять на конце поперечины, на противоположной стороне этого конца поперечины установлена приводная рукоять грузоподъемного механизма, привод которого размещен на том же конце поперечины, причем звездочки ручного цепного грузоподъемного механизма дополнительно установлены на поперечине и на каретке.
Рельсоподъемник содержит две буферные пружины, с помощью которых ручной цепной грузоподъемный механизм подвешен на каретке, что обеспечивает необходимое натяжение цепи грузоподъемного механизма и устраняет ее торошение при подъеме рельсового захвата после освобождения от груза.
Рельсоподъемник содержит храповой винтофрикционный механизм, состоящий из фрикционного резьбового стакана, скрепленного со входным валом-шестерней редуктора, приводной рукояти с фрикционной втулкой, навинченной на стакан, храпового колеса, установленного с возможностью вращения относительно стакана, и собачки, что сводит работу оператора при включении/отключении тормозной функции храпового винтофрикционного механизма к простым, быстрым и безопасным манипуляциям.
Рельсоподъемник содержит рельсовый захват, в котором дополнительно имеются обойма, клин, подпружиненный относительно обоймы и имеющий в нижней части скосы, рычаг быстрого сброса, поворотный относительно обоймы, и две скобы, через которые рычаг воздействует на клин, причем полузахваты, установленные с возможностью поворота относительно обоймы, имеют в верхней части скосы, взаимодействующие со скосами клина, и наклонные планки в нижней части, что обеспечивает, во-первых, центрирование захвата относительно головки рельса, самозахватывание рельса при упоре захвата в головку рельса и последующем опускании захвата и, во-вторых, экстренное раскрытие полузахватов при возникновении нештатной ситуации.
Новыми по сравнению с прототипом в заявляемом рельсоподъемнике являются следующие признаки:
- новые конструктивные элементы:
ручной зубчато-цепной механизм перемещения каретки, имеющий поворотную приводную рукоять, установленную на конце поперечины рамы,
фрикционный резьбовой стакан, скрепленный со входным валом-шестерней редуктора и выполненный с возможностью фрикционного контакта своего торца с торцом храпового колеса, установленного с возможностью вращения относительно стакана,
буферные пружины для подвески грузоподъемного механизма на каретке, размещенные симметрично относительно вертикальной оси каретки и грузоподъемного механизма,
обойму рельсового захвата, к которой шарнирно присоединены два полузахвата,
наклонные планки в нижней части полузахватов, выполненные с возможностью взаимодействия с головкой рельса,
клин рельсового захвата, подпружиненный относительно обоймы и имеющий в нижней части скосы, взаимодействующие со скосами полузахватов,
пружина, подпружинивающая клин относительно обоймы рельсового захвата,
рычаг быстрого сброса, поворотный относительно обоймы рельсового захвата и выполненный с возможностью воздействия на клин,
две скобы рельсового захвата, соединенные между собой двумя осями-пальцами, верхний из которых соединен с клином, а на нижний воздействует рычаг быстрого сброса,
- новая геометрическая форма выполнения конструктивных элементов:
приводная рукоять грузоподъемного механизма выполнена заодно с фрикционной втулкой, навинченной на фрикционный резьбовой стакан и выполненной с возможностью фрикционного контакта своего торца с торцом храпового колеса, причем храповое колесо с собачкой, фрикционный резьбовой стакан и фрикционная втулка конструктивно составляют храповой винтофрикционный механизм,
полузахваты выполнены со скосами в верхней части,
- новые связи между конструктивными элементами:
грузоподъемный механизм соединен с кареткой с помощью двух буферных пружин, размещенных симметрично относительно вертикальной оси каретки и грузоподъемного механизма,
храповое колесо установлено с возможностью вращения относительно фрикционного резьбового стакана, а не закреплено на входном валу-шестерне редуктора, как сделано в прототипе,
- новое взаимное расположение элементов:
привод грузоподъемного механизма, а именно приводная рукоять, храповой винтофрикционный механизм и редуктор, установлены на том же конце поперечины, что и приводная рукоять механизма перемещения каретки, но на противоположной стороне поперечины,
звездочки ручного цепного грузоподъемного механизма дополнительно установлены на поперечине рамы и на подвижной каретке,
- новый параметр конструктивного элемента:
цепь грузоподъемного механизма выполнена с запасом длины, равным сумме наибольшей высоты подъема рельса и наибольшей величины перемещения каретки.
Перечисленные новые признаки в предлагаемом сочетании дают решение поставленной задачи, обеспечивая реализацию возможности простого и безопасного управления работой рельсоподъемника. Эти признаки характеризуют новизну конструкции и по сравнению с прототипом повышают производительность и безопасность работы, что является следствием следующих факторов:
- оснащение подвижной каретки ручным зубчато-цепным механизмом ее перемещения снижает мускульную нагрузку на руки оператора и повышает удобство работы с рельсоподъемником,
- размещение приводной рукояти механизма перемещения каретки на конце поперечины рамы, а также установка приводной рукояти грузоподъемного механизма на том же конце поперечины рамы, но с противоположной стороны поперечины, дают оператору возможность находиться в процессе работы в безопасной зоне, а именно у торца рельсоподъемника, вне рабочей зоны подъема-опускания рельса, что существенно повышает безопасность производства работ,
- оснащение привода грузоподъемного механизма храповым винтофрикционным механизмом дает возможность с помощью приводной рукояти управлять включением/отключением тормозной функции храпового винтофрикционного механизма, включая ее при подъеме рельса и отключая - при опускании, что сводит работу оператора к простым, быстрым и безопасным манипуляциям,
- применение двух буферных пружин в подвеске грузоподъемного механизма снижает динамичность, повышает надежность работы цепной связи грузоподъемного механизма, так как позволяет сохранить необходимое натяжение цепной связи и избежать ее торошения при подъеме рельсового захвата после освобождения от груза,
- рычажно-клиновая конструкция рельсового захвата с наклонными планками в нижней части обеспечивает, во-первых, центрирование захвата относительно головки рельса, самозахватывание рельса при упоре захвата в головку рельса и последующем опускании захвата и, во-вторых, экстренное раскрытие полузахватов при возникновении нештатной ситуации, когда к работающему на пути рельсоподъемнику с подвешенным рельсом неожиданно приближается подвижной состав. В этом случае оператору достаточно только нажать на рычаг быстрого сброса - и рельсоподъемник быстро и безопасно освободится от рельса. Возможное столкновение подвижного состава с незагруженным рельсоподъемником не является аварийным, поскольку подвижной состав легко столкнет рельсоподъемник с железнодорожного пути. В противном случае столкновение с загруженным рельсоподъемником может привести к аварии с тяжелыми последствиями для подвижного состава. Таким образом, предлагаемая конструкция захвата значительно повышает производительность и безопасность работы с рельсоподъемником, причем не только для оператора, но и для подвижного состава.
Изложенное выше дает основание сделать вывод о соответствии предлагаемого технического решения критерию "новизна". Кроме того, заявляемая конструкция соответствует критерию "изобретательский уровень", так как она для специалиста явным образом не следует из уровня развития техники и не может быть разработана с использованием общеизвестных методов, методик, способов и приемов конструирования машин и механизмов.
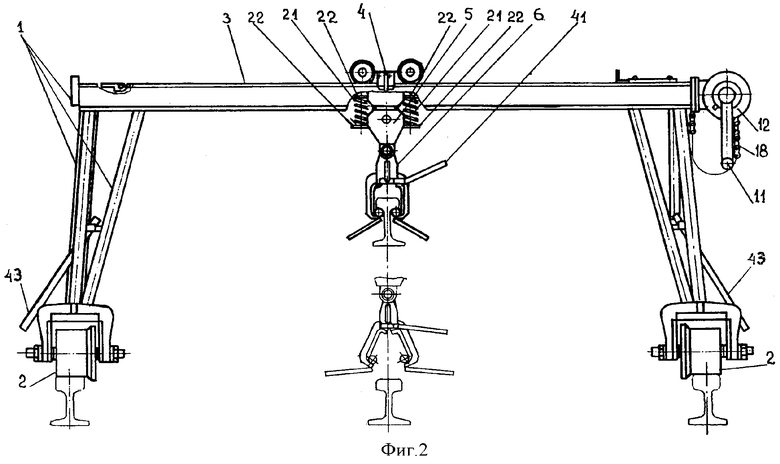
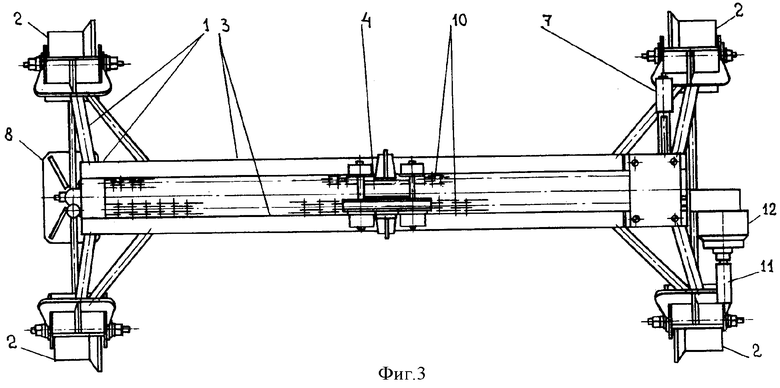
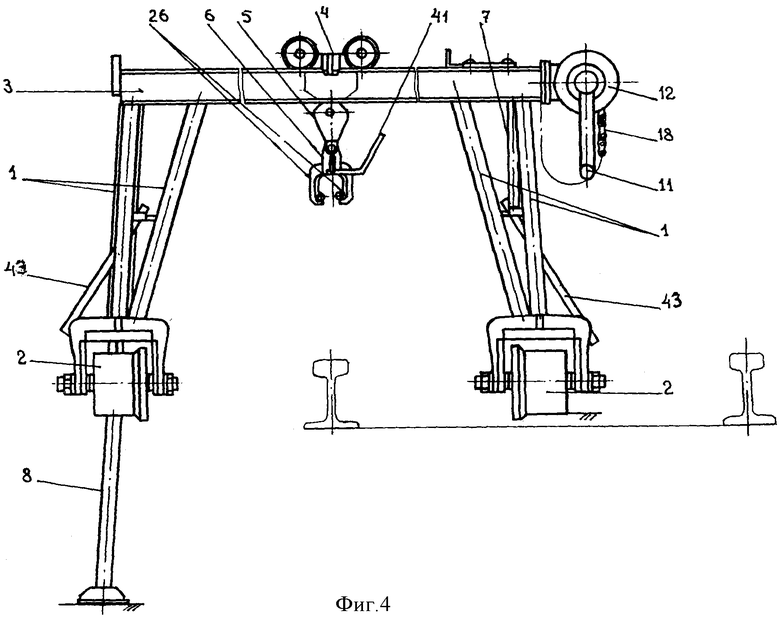
Заявляемый рельсоподъемник иллюстрируется чертежами, где на фиг.1 представлена структурная схема рельсоподъемника, на фиг.2 - общий вид рельсоподъемника в рабочем положении на железнодорожном пути, на фиг.3 - то же, вид сверху, на фиг.4 - общий вид рельсоподъемника в рабочем положении при установке не на рельсах, на фиг.5 - ручной привод грузоподъемного механизма в разрезе, на фиг.6 - то же, вид сбоку, на фиг.7 - рельсовый захват в рабочем положении, на фиг.8 - одна из двух пластин обоймы рельсового захвата.
Согласно фиг.1-6 рельсоподъемник содержит раму 1 на колесах 2 с поперечиной 3. На поперечине 3 размещена подвижная каретка 4 с ручным цепным грузоподъемным механизмом 5 и рельсовым захватом 6. На раме 1 смонтирован ручной зубчато-цепной механизм перемещения каретки с приводной рукоятью 7, установленной на конце поперечины 3. Рама 1 снабжена быстроподъемной опорой 8. Механизм перемещения каретки 4 выполнен с зубчатой 9 и цепной 10 передачами. На раме 1 смонтирован также привод грузоподъемного механизма 5 с приводной рукоятью 11 на том же конце поперечины 3, где находится приводная рукоять 7 механизма перемещения каретки 4, но с другой стороны поперечины 3. Привод грузоподъемного механизма 5 содержит планетарный зубчатый редуктор 12, на вал водила которого насажена входная ведущая звездочка 13. Входная вал-шестерня 14 редуктора 12 связана с рукоятью 11 через храповой винтофрикционный механизм, содержащий фрикционный резьбовой стакан 15, храповое колесо 16, фрикционную втулку с рукоятью 11 и собачку 17 для фиксации положения поднятого рельса. Фрикционная втулка навернута на фрикционный резьбовой стакан 15, скрепленный со входным валом-шестерней редуктора 12, причем торцы втулки и стакана 15 могут входить во фрикционный контакт с торцами храпового колеса 16. На звездочку 13 насажена цепная связь (цепь) 18, огибающая также звездочки 19 на каретке и звездочку 20 грузоподъемного механизма 5. Концы цепи 18 закреплены на поперечине 3. Конец цепи 18, огибающий звездочку 13, выполнен с запасом длины, равным сумме наибольшей высоты подъема рельса и наибольшей величины перемещения каретки 4. Таким образом, обе рукояти 7 и 11 управления работой рельсоподъемника расположены рядом и в безопасной для операторов зоне - на одном и том же конце поперечины 3.
Грузоподъемный механизм 5 подвешен на подвижной каретке 4 с помощью буферных пружин 21, смонтированных между выступами 22 на щеках грузоподъемного механизма 5 и на каретке 4 симметрично относительно вертикальной оси каретки 4 и грузоподъемного механизма 5. Буферные пружины 21 выполняют функцию натяжителей, что особенно важно для нормальной работы цепной связи 18, предотвращая ее торошение и повышая надежность работы.
Рельсовый захват 6 (фиг.1, 2, 4, 7, 8) подвешен на грузоподъемном механизме 5 и включает в себя обойму, состоящую из двух одинаковых пластин 23. В обойме на осях 24, 25 установлены поворотные относительно нее полузахваты 26, в верхней части которых выполнены рабочие скосы 27. В каждой из пластин 23 сделаны по три отверстия 28, 29, 30 и по две прорези 31, 32. В отверстия 28, 29 вставлены оси 24, 25 для установки полузахватов 26, а в отверстия 30 - палец 33, который соединяет обойму с грузоподъемным механизмом 5 и на котором установлен фиксатор 34 пружины 35. Через прорези 31 пропущена ось-палец 36, а через прорезь 32 - ось-палец 37. Ось-палец 36 соединена с подпружиненным клином 38, выполненным со скосами 39. Оси-пальцы 36, 37 соединяют между собой две скобы 40. На оси 24 установлен рычаг 41 быстрого сброса, имеющий на своей консоли прорезь, через которую пропущена ось-палец 37 - таким образом рычаг быстрого сброса может воздействовать через ось-палец 37, скобы 40 и ось-палец 36 на клин 38, который удерживает полузахваты 26 в нормально-замкнутом положении. С помощью рычага 41 быстрого сброса можно разомкнуть рельсовый захват 6 в любой момент времени, когда груз находится в подвешенном состоянии, что требуется по технологии работы с рельсоподъемником при возникновении нештатных ситуаций. Полузахваты 26 снабжены наклонными планками 42 для центрирования рельсового захвата 6 относительно головки рельса.
Кроме того, рама 1 снабжена рукоятками 43, при помощи которых рельсоподъемник вручную устанавливают на рельсы железнодорожного пути, перемещают по рельсам и снимают с них.
Предлагаемый рельсоподьемник работает следующим образом.
При работе на железнодорожном пути рельсоподъемник на колесах 2 вручную подводят к месту расположения рельса, с которым необходимо выполнить подъемные и транспортные операции. Так же поступают со вторым рельсоподъемником, располагая оба рельсоподъемника относительно рельса так, чтобы его вес был равномерно распределен между рельсоподъемниками. Дальнейшую работу рельсоподъемников осуществляют одновременно. Ниже дается описание работы применительно к одному из них.
Вращением рукояти 7 механизма перемещения каретки 4 устанавливают каретку 4 над рельсом. Поворотом рукояти 11 отключают тормозную функцию храпового винтофрикционного механизма, свинчивая фрикционную втулку с фрикционного резьбового стакана 15 и отодвигая торец втулки от торца храпового колеса 16, тем самым освобождая храповое колесо 16 от заклинивания между втулкой и стаканом 15. Разорвав таким образом кинематическую цепь "рукоять 11 - вал-шестерня 14 - звездочка 13 - грузоподъемный механизм 5 с рельсовым захватом 6", опускают грузоподъемный механизм 5 с рельсовым захватом 6 под действием их веса на головку рельса, выбирая запас длины цепи 18. Наклонные планки 42 центрируют рельсовый захват 6 относительно головки рельса.
Под действием силы тяжести полузахваты 26 при их упоре в головку рельса поворачиваются на осях 24, 25, раскрываются и, воздействуя своими рабочими скосами 27 на скосы 39 подпружиненного клина 38, выдавливают клин 38 вверх. При этом ось-палец 36, с которой соединены клин 38 и скобы 40, перемещается в крайнее верхнее положение прорези 31, сжимая при этом пружину 35. Скосы 39 клина 38 выходят из контакта со скосами 27 полузахватов 26, раскрытые полузахваты 26 охватывают боковые грани головки рельса. При дальнейшем опускании после прохождения боковых граней головки рельса полузахваты 26 под воздействием моментов сил, возникающих из-за смещения их центров масс относительно осей 24, 25, поворачиваются навстречу друг другу, рабочие скосы 27 расходятся, клин 38 под действием пружины 35 опускается. Скосы 39 клина 38 вступают во взаимодействие с рабочими скосами 27 полузахватов 26, которые, замыкаясь на шейке рельса, удерживают его - рельс подготовлен к подъему. Описанная выше последовательность движений представляет собой явление самозахватывания рельса. В случае возникновения затруднений в раскрытии полузахватов 26 нажимают (вниз по фиг.7) на рычаг 41 быстрого сброса, который, поворачиваясь на оси 24, воздействует через ось-палец 37, скобы 40 и ось-палец 36 на клин 38, поднимает его вверх, давая полузахватам 26 возможность раскрыться.
После захвата рельса, вращая рукоять 11 с фрикционной втулкой, навинченной на фрикционный резьбовой стакан 15, скрепленный с валом-шестерней 14 редуктора 12, зажимают (заклинивают) храповое колесо 16 между торцами втулки и стакана 15. В результате при дальнейшем вращении рукояти 11 передают движение через редуктор 12 на звездочку 13 и далее на цепь 18, поднимая вверх рельсовый захват 6 с рельсом при помощи грузоподъемного механизма 5. При этом собачка 17, введенная в зацепление с храповым колесом 16, фиксирует рельс от самопроизвольного опускания под действием силы веса, выполняя тормозную функцию. После подъема рельса на 150-200 мм над уровнем железнодорожного полотна перемещают оба рельсоподъемника вручную вдоль пути в нужное место. Затем при необходимости вращением рукояти 7 с помощью зубчато-цепного механизма 9, 10 перемещают каретку 4 с рельсовым захватом 6 и рельсом в нужном направлении поперек рельсового пути.
После доставки рельса на место отключают поворотом рукояти 11 тормозную функцию храпового винтофрикционного механизма и опускают рельс на железнодорожное полотно. Все манипуляции с рукоятью 7 механизма перемещения каретки 4 и с рукоятью 11 грузоподъемного механизма 5 оператор осуществляет, располагаясь на одном месте у торца рельсоподъемника, вне опасной зоны движения груза - таким образом обеспечивается безопасность при проведении работ. Когда рельс достиг железнодорожного полотна, освобождают рельсовый захват 6 от рельса, нажав вниз рычаг 41 быстрого сброса. Затем, вращая рукоять 11, поднимают рельсовый захват 6 без рельса, при этом буферные пружины 21 противодействуют подъему (сжимаются), увеличивая натяжение цепи 18 на участке между кареткой 4 и грузоподъемным механизмом 5 и предотвращая вредное торошение цепи 18 на участке между кареткой 4 и редуктором 12, что повышает надежность работы цепного грузоподъемного механизма и эффективность работы рельсоподъемника.
При необходимости выполнения работ с рельсоподъемником вне железнодорожного полотна (фиг.4), например для перемещения рельса на обочину или обратно, вручную за рукоятки 43 выставляют рельсоподъемник в нужное положение, устанавливают на необходимую высоту опору 8 и осуществляют дальнейшую работу так, как было описано выше, при этом поперечина 3 рамы 1 должна иметь строго горизонтальное положение.
В случае возникновения в процессе работы нештатной ситуации, характеризуемой неожиданным появлением подвижного состава на пути перемещения рельсоподъемника с рельсом, оператор сбрасывает рельс, не входя в зону падения рельса, ударяет по рычагу 41 быстрого сброса. Рычаг 41 идет вниз и воздействует на клин 38, поднимая его вверх. Скосы 39 клина 38 выходят из контакта с рабочими скосами 27 полузахватов 26 и сжимают пружину 35. Под действием веса рельса полузахваты 26, освобожденные от клина 38, поворачиваются на осях 24, 25, раскрываются и освобождают рельс. Возможное столкновение подвижного состава с незагруженным рельсоподъемником, как отмечалось выше, не приводит к аварии. Таким образом обеспечивается безопасность подвижного состава и повышается эффективность работы рельсоподъемника.
Авторами предлагаемого изобретения разработана рабочая документация на рельсоподъемник, изготовлен и успешно испытан его опытный образец. Испытания показали, что по сравнению с прототипом предлагаемый рельсоподъемник более удобен, безопасен и надежен в работе, имеет более широкие эксплуатационные возможности и обладает рядом других преимуществ. Его грузоподъемность составляет не менее 10 кН, высота подъема рельса не менее 0,4 м, величина поперечного перемещения не менее 1,06 м, силы на приводных рукоятях не более 147 Н, сила, необходимая для перемещения вдоль пути, не более 270 Н, время сброса рельса с применением рычага быстрого сброса 1 с, масса рельсоподъемника не более 100 кг, его обслуживают двое рабочих. Основные характеристики и показатели работы предлагаемого рельсоподъемника на 15-35% превосходят характеристики и показатели работы прототипа. Приемочная комиссия рекомендовала начать серийное производство предлагаемого рельсоподъемника, что свидетельствует о его промышленной применимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ МОНОРЕГУЛЯТОРОВ | 2004 |
|
RU2276215C2 |
| СТАНОК РЕЛЬСОСВЕРЛИЛЬНЫЙ | 2010 |
|
RU2464371C2 |
| Устройство для сверления отверстий в рельсах | 1990 |
|
SU1813822A1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ ПРОКЛАДОК РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2004 |
|
RU2320796C2 |
| КЛЮЧ ШУРУПОГАЕЧНЫЙ | 2007 |
|
RU2334041C1 |
| Устройство для закрепления железнодорожного состава | 2019 |
|
RU2712389C1 |
| Устройство для подъёма кресла-коляски с ручным приводом по лестницам | 2023 |
|
RU2823397C1 |
| БЛОК УДЕРЖАНИЯ СОСТАВА НА СТАНЦИОННОМ ПУТИ | 2015 |
|
RU2578642C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПЕРЕМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ ВАГОНОВ | 2022 |
|
RU2781318C1 |
| Канатная дорога | 1991 |
|
SU1796512A1 |




Изобретение относится к подъемно-транспортным устройствам с ручным приводом для подъема, перемещения и опускания железнодорожных рельсов. Рельсоподъемник содержит раму с колесами и опорой. На поперечине рамы с возможностью перемещения по поперечине размещена каретка с ручным цепным грузоподъемным механизмом, привод которого содержит приводную рукоять, храповой механизм и редуктор. Рельсовый захват состоит из двух полузахватов. Рельсоподъемник снабжен ручным зубчато-цепным механизмом перемещения каретки, установленным на поперечине рамы и имеющим приводную рукоять на конце поперечины. На противоположной стороне этого конца поперечины установлена приводная рукоять грузоподъемного механизма, привод которого размещен на том же конце поперечины. Причем звездочки ручного цепного грузоподъемного механизма дополнительно установлены на поперечине и на каретке. Техническим результатом является повышение производительности и безопасности работы, улучшение удобства пользования и расширение эксплуатационных возможностей рельсоподъемника. 3 з.п. ф-лы, 8 ил.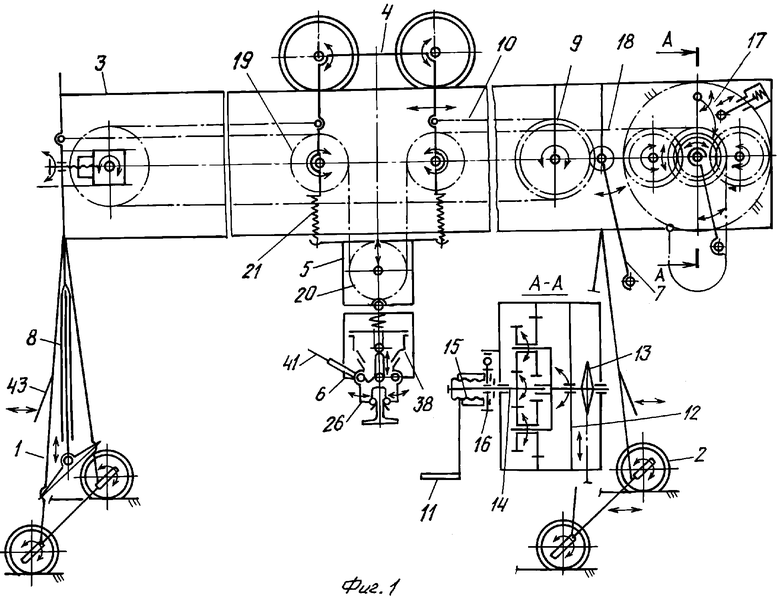
| ЖЕЛЕЗНЫЕ ДОРОГИ МИРА, №10, 1990, с.53 | |||
| ПОДЪЕМНИК РЕЛЬСОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1998 |
|
RU2139968C1 |
| Устройство для захвата прокатных профилей | 1974 |
|
SU537016A1 |
| JP 2007016451 A, 25.01.2007 | |||
| 0 |
|
SU293637A1 | |

