Изобретение относится к электроаппаратостроению, в частности к многопозиционным групповым переключателям для регулирования напряжения на тяговых двигателях электровозов.
Известен контроллер машиниста, состоящий из двух рам, соединенных рейками, между двумя рамами установлены главный, реверсивный и тормозной кулачковые валы, кулачковые контакторы, механические блокировки, датчик торможения, блок задатчика тормозной силы. На валу главного и тормозного валов контроллера установлены профильные шайбы, с помощью которых через рычаги производится поворот соответствующего ротора сельсина для получения выходного напряжения возбуждения (ЗДВ), тяги (ЗДТ) и рекуперации (ЗДР). Шкалы главного и тормозного валов контроллера поворачиваются вместе и имеют подсветку, которая выполняет функцию указателя положения (см. Руководство по эксплуатации «Электровоз ВЛ80Р» под ред. Б.А.Тушканова, М.: «Транспорт», 1985, стр.143-145; см. Руководство по эксплуатации «Электровоз ВЛ80С», издание 2-ое, переработанное и дополненное. М.: «Транспорт», 1990, стр.68-70).
Недостатком таких контроллеров тяги, возбуждения и рекуперации является сложность изготовления профильных шайб и установка их с такой точностью, чтобы угол поворота вала соответствовал выходному напряжению с ротора сельсина с плавным, линейным нарастанием от нуля до максимума и наоборот, с плавным, линейным снижением напряжения от максимума до нуля, что соответствовало бы плавному нарастанию скорости электровоза и плавной остановке при торможении. Неточность установки профильных шайб на валах или их износ и поломка, а также заедание рычагов, связывающих профильные шайбы с роторами сельсинов, приводят к пульсации и нелинейности получаемого напряжения для регулировании скорости электровоза, что, в свою очередь, приводит к рывкам при движении и толчкам при торможении электроподвижного состава. Для снижения рывков и толчков на контроллере машиниста устанавливается дополнительное оборудование, что создает громоздкость конструкции и снижает показатели надежности контроллера. Это может приводить к созданию аварийных ситуаций с угрозой безопасности движения электроподвижного состава.
Наиболее близким по технической сущности к изобретению является контроллер, состоящий из основания, на котором закреплены четыре рамы, соединенные рейками, между рамами установлен главный кулачковый вал, выполняющий функцию тяги, реверсивный кулачковый вал, выполняющий функцию изменения направления движения («Вперед» или «Назад»), механической блокировки, обеспечивающей взаимодействие этих валов, вала скорости, выполняющего функцию регулирования скорости, переменных резисторов в качестве датчиков. Главный кулачковый вал и вал скорости соединены с осями переменных резисторов (потенциометров) через поводки (см. Руководство по эксплуатации. «Электровоз ЭП1», том 1, стр.289, Ростов-на-Дону, ООО «Белая Русь», 2006).
На одном конце пластины поводка находится прорезь и стопорный винт для сжатия прорези, в которую вставляются концы главного кулачкового вала и вала скорости, а на другом конце пластины поводка имеется штифт, соединяющий его с резисторами. Положение поводка во время поворота главного вала и вала скорости контроллера и угла поворота резисторов, соответствующее скорости электровоза, зависит от точной фиксации поводка на осях главного вала и вала скорости и требуемому угловому смещению осей резисторов. После настройки всех угловых смещений стопорные винты закручивают до упора. Усилие при стопорении создает момент, т.к. стопорный винт находится на некотором расстоянии от оси вращения валов и не позволяет без затруднений установить величину выходного напряжения, соответствующую линейному нарастанию скорости электровоза.
Недостатком конструкции прототипа является клеммовая, поводковая регулировка переменных резисторов положением главного вала контроллера и вала скорости. Неправильная установка поводка во время сборки и наладки контроллера или малейшее смещение его во время эксплуатации приводит к изменению линейности характеристики напряжения, что приводит к резкому нарастанию скорости электровоза или к резкому торможению. Это создает неудобство в эксплуатации, снижает показатели надежности контроллера, что приводит к аварийным ситуациям, угрожает безопасности электроподвижного состава.
Задачей изобретения является повышение надежности контроллера.
Для решения поставленной задачи в контроллер машиниста, состоящий из основания, на котором закреплены две продольные рейки и четыре поперечные рамы, между которыми закреплены главный кулачковый вал, выполняющий функцию управления тягой и торможением, и реверсивный кулачковый вал, выполняющий функцию изменения направления движения, каждый с рукоятками управления и соответствующей группой кулачковых контакторов, и расположенные соосно, механической блокировки, обеспечивающей взаимодействие главного и реверсивного кулачковых валов, потенциометров (переменных резисторов), в качестве задатчиков усилия тяги или торможения введены новые признаки: реверсивный вал выполнен внутри полым (пустым), через который проходит (насквозь) главный кулачковый вал, на каждый конец которого насажен диск, с боковой стороны которого имеется сквозное отверстие с резьбой и глухое отверстие без резьбы, расположенные друг к другу под углом 90°. В отверстие с резьбой с противоположных сторон закручены винты, служащие для фиксации диска на концах главного кулачкового вала, в глухое отверстие диска вставлена пружина, которая одним концом прижимается в дно отверстия, а другим концом входит в проточку на концах главного кулачкового вала контроллера, создавая момент трения. На плоскости каждого диска имеется штифт, который своим концом входит в паз рычага, насаженного на ось каждого потенциометра, служащий задатчиком усилия тяги или торможения и закрепленного на нем с помощью гайки. Рычаг имеет форму ступеньки (выполнен в виде ступеньки) со сквозным продольным пазом на одном конце для штифта диска и глухим поперечным пазом на другом конце для жесткой фиксации рычага на осях потенциометров задатчиков усилия тяги или торможения. Потенциометры закреплены на кронштейнах, которые крепятся с помощью винтов к поперечным рамам контроллера. Потенциометр на одном конце главного кулачкового вала контроллера является задатчиком усилия в режиме тяги, а потенциометр на другом конце главного вала является задатчиком усилия в режиме торможения. Выбор потенциометра происходит при помощи кулачкового контактора в зависимости от направления вращения главного вала контроллера.
Таким образом, подвижная связь главного кулачкового вала контроллера с потенциометрами задатчиков усилия тяги или торможения с помощью подвижного звена не создает момента для смещения при наладке и стопорении дисков на концах валов, что позволяет повысить надежность контроллера.
Изобретение поясняется чертежами, на которых изображены:
Фиг.1. Контроллер машиниста.
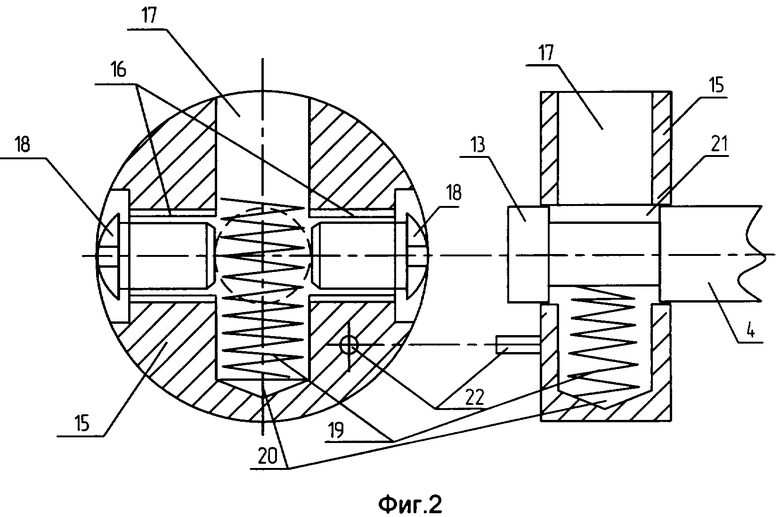
Фиг.2. Диск со штифтом и отверстиями.
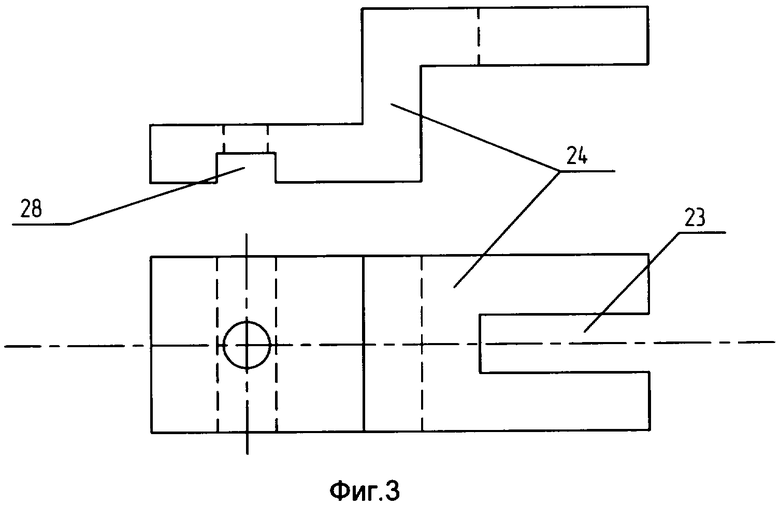
Фиг.3. Рычаг с продольным и поперечным пазами для потенциометра.
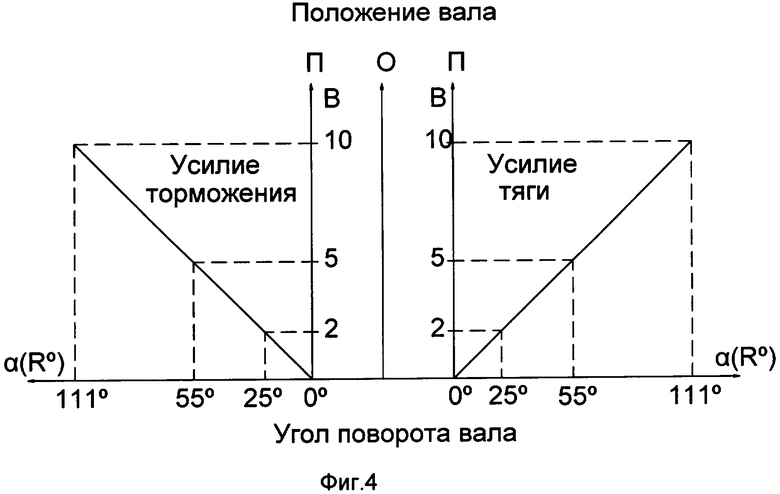
Фиг.4. Диаграмма напряжений на выходе задатчика усилия тяги или торможения.
Контроллер машиниста состоит из основания 1, на котором закреплены четыре поперечные рамы 2, соединенные продольными рейками 3. Между рамами 2 установлены главный кулачковый вал 4, выполняющий функцию тяги и торможения, реверсивный кулачковый вал 5, выполняющий функцию изменения направления движения («Вперед» или «Назад»), каждый с рукоятками управления 6 и 7 и соответствующей группой кулачковых контакторов 8 и 9, и расположенные соосно, механической блокировки 10, обеспечивающей взаимодействие этих валов, потенциометров 11 и 12 в качестве задатчиков усилия тяги и торможения соответственно. Реверсивный кулачковый вал 5 выполнен внутри полым, и через него проходит (насквозь) главный кулачковый вал 4, на каждый конец 13 и 14 которого насажен диск 15, с боковой стороны которого (см. фиг.2) имеются сквозное отверстие с резьбой 16 и глухое отверстие без резьбы 17, расположенные под углом друг к другу. В отверстия с резьбой 16 закручены винты 18, служащие для фиксации диска 15 на каждом конце 13 и 14 главного кулачкового вала 4 контроллера, а в глухое отверстие 17 диска 15 вставлена пружина 19, которая одним концом прижимается в дно отверстия 20, а другим концом входит в проточку 21 на концах 13 и 14 главного вала 4 контроллера (см. фиг.2). На плоскости каждого диска 15 имеется штифт 22, который своим концом входит в продольный сквозной паз 23 рычага 24 (см. фиг.3), насаженного на оси 25 и 26 потенциометра 11 и 12, служащего задатчиком усилия тяги и торможения соответственно и закрепленного на нем с помощью гайки 27. Рычаг 24 имеет форму ступеньки с продольным сквозным пазом 23 на одном конце для штифта 22 диска 15 и поперечным глухим пазом 28 на другом конце для жесткой фиксации рычага 24 на оси 25 и 26 потенциометра 11 и 12 задатчика усилия тяги и торможения соответственно. Потенциометры 11 и 12 закреплены на кронштейнах 29 и 30 (см. фиг.1), которые крепятся с помощью винтов 31 к поперечным рамам 2 контроллера. В зависимости от направления поворота главного кулачкового вала 4 контроллера, а соответственно заданного направления движения («Вперед» или «Назад») электровоза, выбирается потенциометр 11 или 12 с помощью одного из группы кулачковых контакторов 8. Потенциометр 11 на одном конце главного кулачкового вала 4 контроллера является задатчиком усилия в режиме тяги, а потенциометр 12 на другом конце главного кулачкового вала 4 является задатчиком усилия в режиме торможения.
Контроллер настраивается и работает следующим образом. Перед началом включения контроллера главный кулачковый вал 4 находится в положении «0», диски 15 на концах 13 и 14 главного кулачкового вала 4 прижимаются только пружинами 19 при ослабленных винтах 18, создавая момент трения. Пружина 19 подобрана таким образом, чтобы момент сопротивления диска 15 от пружины 19 был намного больше момента сопротивления вращения оси 25 или 26 потенциометра 11 или 12. Это позволяет при ослабленных стопорных винтах 18 произвести точную установку выходного напряжения. Вращая вручную диск 15 совместно с потенциометром 11 или 12, устанавливают нулевое значение выходного напряжения на потенциометре 11 или 12 (положение «0» на фиг.4) и винтами 18 фиксируют диск 15 на каждом конце 13 и 14 главного кулачкового вала 4 контроллера. Машинист, вращая реверсивный кулачковый вал 5 с помощью рукоятки 7, задает направление движения («Вперед» или «Назад»), а затем начинает вращать главный кулачковый вал 4 рукояткой 6 и с помощью кулачкового контактора 8 подключает один из потенциометров 11 или 12 для задания усилия тяги или торможения (положение «П» на фиг.4) в зависимости от выбранного направления движения. Максимальный угол поворота главного кулачкового вала 4 составляет 111°, что соответствует максимальному значению выходного напряжения на потенциометрах 11 и 12 задатчика усилия тяги или торможения соответственно. Тип и номинал потенциометров 11 и 12 подобраны таким образом, что от угла поворота главного кулачкового вала 4, а соответственно и угла поворота каждого потенциометра 11 и 12, с помощью подвижной связи значение напряжения на потенциометрах 11 и 12 изменяется линейно от нуля до максимума, что соответствует плавному изменению скорости электровоза (см. фиг.4). Несоосное положение оси главного кулачкового вала 4 и осей потенциометров 11 и 12 (из-за технологических отклонений) компенсируется наличием сквозного продольного паза 23 в рычаге 24, насаженного на ось каждого потенциометра 11 и 12.
Таким образом, использование диска 15 со штифтом 22 на концах главного вала 4 контроллера и рычага 24 с продольным сквозным пазом 23 на оси каждого потенциометра 11 и 12 создает подвижную совместную связь, которая способствует возможности избежать поломки потенциометров 11 и 12, ошибочных значений и нелинейности выходного напряжения задатчика усилия тяги или торможения при ее регулировании, добиться простоты при его настройке и эксплуатации, что позволяет повысит надежность контроллера.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР МАШИНИСТА | 2006 |
|
RU2318264C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств. | 2019 |
|
RU2720390C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств | 2019 |
|
RU2720597C1 |
| КОНТРОЛЛЕР МАШИНИСТА | 2007 |
|
RU2325721C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| Устройство ввода команд | 2018 |
|
RU2679745C1 |
| КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМИ ЭЛЕКТРОПРИВОДАМИ ВАГОНОВ МЕТРОПОЛИТЕНА | 2007 |
|
RU2342727C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| Роликовый токоприемник | 1934 |
|
SU42142A1 |
Изобретение относится к групповым переключателям для регулирования напряжения на тяговых двигателях электровозов. Контроллер машиниста состоит из основания, на котором закреплены две продольные рейки и четыре поперечные рамы, между которыми закреплены главный кулачковый вал, выполняющий функцию управления тягой и торможением, и реверсивный кулачковый вал, выполняющий функцию изменения направления движения. Каждый вал снабжен рукояткой управления и соответствующей группой кулачковых контакторов. Валы расположены соосно. Реверсивный вал выполнен внутри полым и через него проходит (насквозь) главный кулачковый вал, на каждый конец которого насажен диск, с боковой стороны которого имеется сквозное отверстие с резьбой и глухое отверстие без резьбы, расположенные друг к другу под углом. В отверстие с резьбой с противоположенных сторон закручены винты, служащие для фиксации диска на концах главного кулачкового вала. В глухое отверстие диска вставлена пружина, создающая момент трения. На плоскости каждого диска имеется штифт, который своим концом входит в паз рычага, насаженного на ось каждого потенциометра, служащего задатчиком усилия тяги или торможения и закрепленного на нем с помощью гайки. Потенциометры закреплены на кронштейнах, которые крепятся с помощью винтов к поперечным рамам контроллера. Потенциометр на одном конце главного кулачкового вала контроллера является задатчиком усилия в режиме тяги, а потенциометр на другом конце главного вала является задатчиком усилия в режиме торможения. Технический результат заключается в повышении надежности контроллера. 4 ил.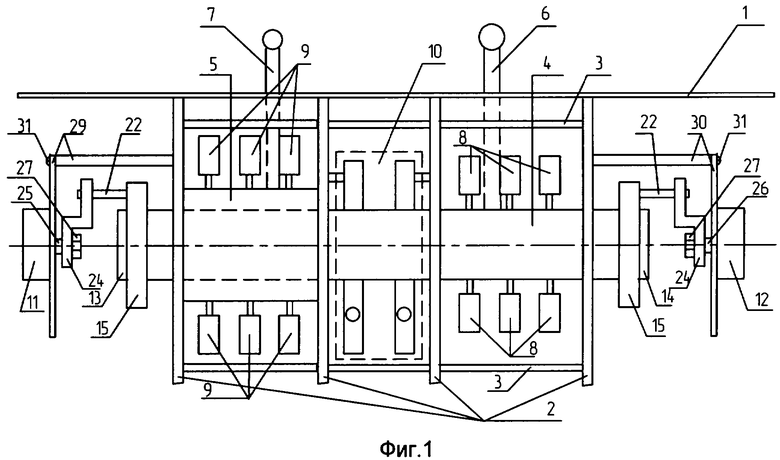
Контроллер машиниста, состоящий из основания, на котором закреплены поперечные рамы, соединенные продольными рейками, между рамами установлены главный кулачковый вал, выполняющий функцию регулирования тяги и торможения, реверсивный кулачковый вал, выполняющий функцию изменения направления движения («Вперед» или «Назад»), каждый с рукоятками управления и соответствующей группой кулачковых контакторов, расположенные соосно, механической блокировки, обеспечивающей взаимодействие этих валов, потенциометров в качестве задатчиков усилия тяги или торможения, отличающийся тем, что реверсивный кулачковый вал выполнен внутри полым и через него проходит главный кулачковый вал, на каждый конец которого насажен диск, с боковой стороны которого имеется сквозное отверстие с резьбой и глухое отверстие без резьбы, расположенные друг к другу под углом, в отверстие с резьбой с противоположенных сторон закручены винты, служащие для фиксации диска на каждом конце главного вала контроллера, а в глухое отверстие диска вставлена пружина, которая одним концом прижимается в дно отверстия, а другим концом входит в проточку на концах главного вала контроллера, на плоскости каждого диска имеется штифт, который своим концом входит в сквозной продольный паз рычага, насаженного на ось каждого потенциометра и закрепленного с помощью гайки, рычаг имеет форму ступеньки со сквозным продольным пазом для штифта диска на одном конце и глухим поперечным пазом для жесткой фиксации рычага на оси потенциометров, которые установлены на кронштейнах, прикрепленных к поперечным рамам, потенциометр на одном конце главного кулачкового вала контроллера является задатчиком усилия в режиме тяги, а потенциометр на другом конце главного кулачкового вала является задатчиком усилия в режиме торможения.
| Прибор для измерения толщины шкур | 1939 |
|
SU56711A1 |
| Барабан контроллера | 1980 |
|
SU943882A1 |
| Фиксатор для остеосинтеза шейки бедра | 1984 |
|
SU1219062A1 |
| Ручная тележка | 1984 |
|
SU1227542A1 |

