Изобретение относится к устройству формирования (выдачи машинистом) команд управления режимами тяги и торможения в систему управления электровозов, тепловозов, трамваев, а также для аналогичных задач, где требуется надежность и достоверность формирования команд управления от оператора.
Известен выключатель ручной в железнодорожном транспорте (блок контроллера машиниста) компании "W.GESSMANN GmbH" (http://xn--80afg2agaya.xn--plai/gallery), содержащий диск с рукояткой, n-кодер (датчик угла), кулачковый механизм, узел торможения. Передача вращения диска производится через редуктор (зубчатая передача) на вал, на котором закреплены два канала автономных n-кодеров (датчиков угла), кулачковый механизм, который непосредственно выдает дискретные сигналы в систему управления верхнего уровня. Узел торможения выполнен с одной стороны и упор ведется в боковую часть диска.
Недостатками выключателя являются отсутствие возможности обработки данных с n-кодера, что требует дополнительной обработки на верхнем уровне системы управления для формирования управляющего воздействия и усложняет эксплуатацию самого устройства. При этом наличие двух каналов n-кодера не позволяет схеме управления верхнего уровня автоматически диагностировать неисправный канал по мажоритарному признаку два из трех. Кроме того, каждый канал n-кодера выдает сигналы по параллельной 9-и разрядной шине, что требует 19 дополнительных проводов и дополнительный блок преобразователей сигналов (блок связи с пультом). Выдача дискретных команд производится с помощью контакторов с кулачковым механизмом, т.е. механическим контактом. При этом на каждый сигнал требуется 2 провода. Таким образом, большое количество дополнительных проводов и блока для связи с верхним уровнем, использование зубчатой передачи, высокая вероятность перекоса тормозной колодки и формирование дискретных команд механическим контактом кулачкового механизма приводят к усложнению конструкции, увеличению габаритных размеров выключателя и снижению надежности.
Из уровня техники известна полезная модель «Контроллер машиниста» по патенту РФ 174021 с датой публикации 26.09.2017, содержащий рукоятку тяги и торможения, выполненную в механизме задания тяги и торможения, механизм фиксации положений рукоятки тяги и торможения, блок датчиков положения рукоятки тяги и торможения, подключенный к микроконтроллеру, формирователь выходного сигнала, соответствующего положению рукоятки тяги и торможения. Также контроллер содержит дополнительный блок датчиков положения рукоятки тяги и торможения, подключенный к входу микроконтроллера, к выходу которого подключен дополнительный формирователь выходного сигнала, соответствующего положению рукоятки тяги и торможения. Датчики блоков датчиков положения рукоятки тяги и торможения выполнены бесконтактными.
Недостатком данного технического решения является двухканальное формирование команд тяги и торможения, не позволяющее парировать неисправность мажоритирования два из трех.
Наиболее близким техническим решением является полезная модель «Блок задатчика позиций бесконтактного контроллера машиниста» по патенту РФ 61939 с датой публикации 10.03.2007, состоящая из корпуса с рукоятками, блока оптоэлектронных датчиков позиций, механизмов фиксации позиций рукояток. Механизм фиксации позиций главной рукоятки состоит из подпружиненного ролика и диска главной рукоятки с углублениями под ролик. Причем количество и расположение углублений соответствует количеству и расположению позиций главной рукоятки.
Недостатком данного технического решения является отсутствие резервирования команд, а также, невозможность фиксации позиции рукоятки в любой точке рабочей зоны ее перемещения.
Технической задачей, на решение которой направлено заявляемое изобретение, является создание бесконтактного, резервированного устройства ввода команд, выполняющего функции контроллера машиниста и работающего в режиме фиксации позиции рукоятки в любой точке рабочей зоны ее перемещения (при отпускании рукоятки в рабочей зоне управления, она остается в этом положении).
Техническими результатами, которые достигаются при использовании изобретения, являются обеспечение бесконтактного съема информации о положении рукоятки датчиками угла, резервирование элементов формирования команд, режим фиксации рукоятки в любой точке рабочей зоны ее перемещения, а также широкий диапазон входного питающего напряжения, возможность автономной работы каждого канала со своим датчиком угла, повышение надежности и увеличение срока эксплуатации устройства.
Технические результаты достигаются за счет того, что устройство ввода команд содержит привод, имеющий управляющую рукоятку, закрепленную на диске, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик, блоком тормозных колодок с пружиной сжатия, что позволяет обеспечить фиксацию рукоятки в любой точке рабочей зоны. При этом узел торможения расположен внутри диска, пружина между тормозных колодок равномерно давит на стационарные стенки корпуса устройства ввода команд. Держатель двух магнитов закреплен на поворотной оси рукоятки. Устройство ввода команд содержит три канала датчиков угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита. Микросхемы закреплены на платах датчиков угла, объединенных в трехканальный блок датчиков угла. Все три канала датчиков угла соединены с одной платой модуля контроллера, в состав которой входят три канала контроллера со своими источниками питания, два коммутатора для передачи данных с любого из трех контроллеров в одном из двух направлений, два адаптера, которые преобразовывают данные от контроллера об измеренном угле в вид интерфейса RS485 и двух выходных линий для передачи данных в контроллер верхнего уровня системы управления электропоездом.
Кроме того, устройство ввода команд содержит два дополнительных концевых выключателя для формирования сигналов экстренного торможения, срабатывающих от воздействия кулачка, закрепленного на поворотной оси рукоятки, и независящих от основной схемы устройства и непосредственно поступающих на исполнительные устройства системы торможения электропоезда. Команда экстренного торможения присутствует в передаваемом коде наравне с другими управляющими сигналами. Концевые выключатели выполнены с функцией дополнительного дублирования кодовой команды.
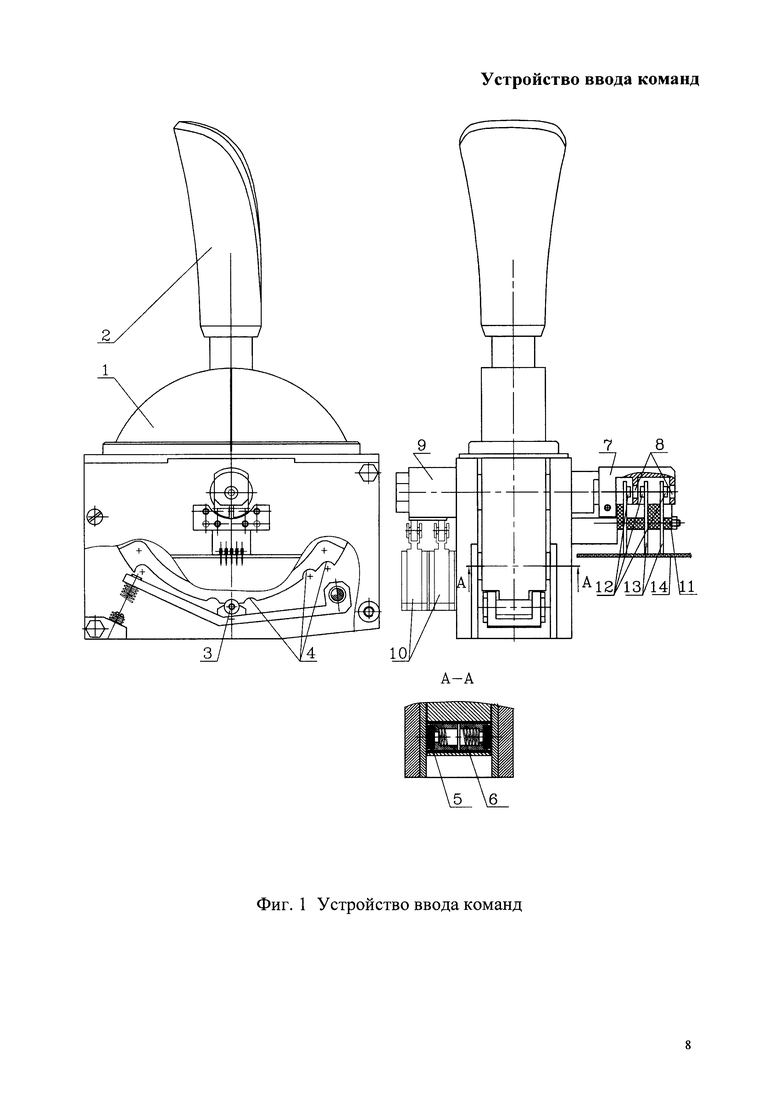
На фиг. 1 приведен чертеж устройства ввода команд машиниста.
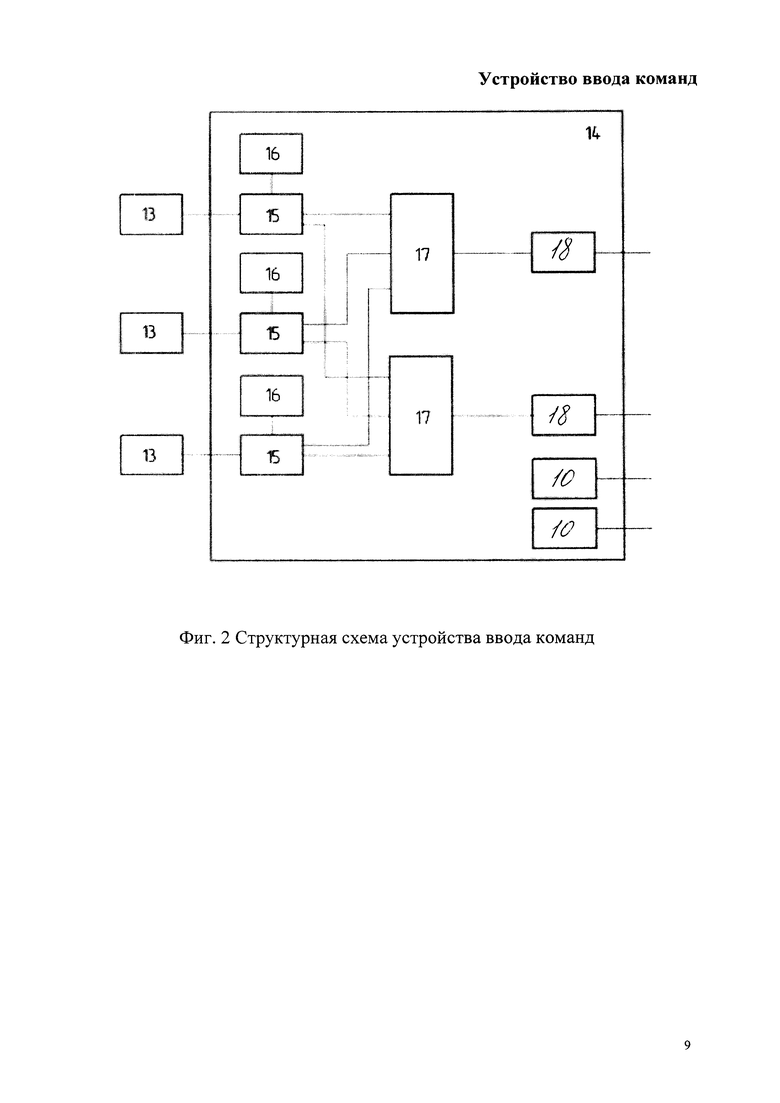
На фиг. 2 приведена структурная схема устройства ввода команд машиниста.
Устройство ввода команд содержит привод, имеющий диск 1 с рукояткой 2, механизм фиксации позиций рукоятки с подпружиненным роликом 3 и углублениями 4 под ролик, блок тормозных колодок 5 с пружиной 6. На общей поворотной оси рукоятки 2 закреплен держатель 7 двух магнитов 8 и кулачок 9, воздействующий на концевые выключатели 10, трехканальный бесконтактный блок датчиков угла 11, каждый канал которого состоит из микросхемы с использованием датчиков Холла 12, расположенной на плате датчика угла и магнита 8. Все три платы датчика угла 13 блока датчиков угла 11 соединены с платой модуля контроллера 14, в состав которой входят три канала контроллера 15 со своими источниками питания 16, два коммутатора 17 для передачи данных с любого из трех контроллеров 15 в одном из двух направлений, две выходные линии, два адаптера 18, которые преобразовывают данные об измеренном угле от контроллера в вид интерфейса RS485 для передачи в контроллер верхнего уровня системы управления электропоездом.
Устройство ввода команд работает следующим образом.
Управление в режиме тяги обеспечивается при переводе машинистом рукоятки 2 из нейтрального положения «от себя» в любую точку до упора. Величина перемещения рукоятки 2 определяет задание уровня тяги.
Управление в режиме торможения обеспечивается при переводе машинистом рукоятки 2 из нейтрального положения «к себе» в любую точку до точки конца зоны торможения. Величина перемещения рукоятки 2 определяет задание уровня торможения. Перевод рукоятки 2 по направлению к машинисту через упор с увеличением приложенного усилия, приводит к срабатыванию концевых выключателей, сигналы с которых непосредственно поступают на исполнительные элементы системы торможения электропоезда.
При повороте рукоятки 2 с диском 1 и приведении рукоятки в любое рабочее положение, в том числе фиксированное, обеспечиваемое подпружиненным роликом 3 и углублениями под ролик 4, происходит поворот вала с закрепленным на нем держателем 7 магнитов 8 относительно стационарно установленных на плате модуля контроллера 14 плат датчиков угла 13, с закрепленными на них микросхемами с использованием датчиков Холла 12, которые производят непрерывное измерение угла поворота магнитов 8 относительно нулевого положения.
Каждый из трех контроллеров 15 платы модуля контроллера 14 непрерывно циклически опрашивает свою микросхему 12 плат бесконтактных датчиков угла 13 о величине измеренного угла. Контроллер 15 производит обработку полученных данных: нормирование, масштабирование, определение величины управляющего воздействия в зависимости от измеренного угла.
При настройке платы модуля контроллера 14 в память контроллеров 15 записываются углы для любого положения рукоятки 2 и соответствующие им управляющие воздействия.
По величине угла, считанного с платы датчика угла 13, контроллер 15 определяет управляющее воздействие, формирует пакет байт по протоколу взаимодействия с системой управления верхнего уровня и выдает их последовательным кодом по двум выходным линиям UART на 2 коммутатора 17, которые подключают нужный канал к первой или второй выходной линии. Это позволяет системе управления верхнего уровня опрашивать данные о положении рукоятки 2 по любой из двух линий с любого канала, что существенно повышает надежность устройства.
С коммутаторов 17 через адаптеры 18, которые преобразовывают данные об измеренном угле от контроллера 15 в вид интерфейса RS485, управляющие воздействия передаются в систему управления верхнего уровня электропоезда.
При отпускании рукоятки 2, последняя фиксируется в любой точке рабочей зоны за счет узла торможения, состоящего из тормозных колодок 5 и пружины 6, расположенных внутри диска 1 и равномерно упирающихся в стационарные стенки корпуса устройства ввода команд, что исключает перекос тормозных колодок 5.
При переводе рукоятки 2 по направлению к машинисту через фиксированную точку конца зоны торможения с увеличением приложенного усилия к рукоятке 2 до упора, кулачок 9, закрепленный с ней на одной оси, воздействуя на концевые выключатели 10, приводит к их срабатыванию, сигналы экстренного торможения с контактов концевых выключателей непосредственно поступают на исполнительные элементы системы управления верхнего уровня, приводя в действие систему торможения. Команда экстренного торможения присутствует в передаваемом коде наравне с другими управляющими сигналами. Концевые выключатели 10 дополнительно дублируют кодовую команду.
Таким образом, выполнение устройства ввода команд, содержащего привод, в котором установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик, тормозные колодки, расположенные внутри диска и равномерно упирающиеся в стационарные стенки корпуса устройства ввода команд, три канала датчика угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, держатель с магнитами закреплен на общей оси диска, при этом микросхемы закреплены на платах датчиков угла, объединенных в трехканальный блок датчиков угла, кроме того, все три канала датчиков угла объединены одной платой модуля контроллера, в состав которой входят три канала контроллера со своими источниками питания, два коммутатора двух выходных линий и два адаптера, а также может содержать два концевых выключателя, выполненных с возможностью срабатывания от воздействия кулачка, закрепленного на поворотной оси рукоятки и с возможностью дополнительного дублирования кодовой команды, обеспечивает бесконтактный съем информации о положении рукоятки датчиками угла, резервирование элементов формирования команд, режим фиксации рукоятки в любой точке рабочей зоны ее перемещения, а также широкий диапазон входного питающего напряжения, возможность автономной работы каждого канала со своим датчиком угла, повышение надежности и увеличение срока эксплуатации устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ввода команд | 2018 |
|
RU2679751C1 |
| Устройство ввода команд для системы управления подруливающим устройством | 2023 |
|
RU2802096C1 |
| Устройство ввода команд для системы управления винторулевой колонкой судна | 2023 |
|
RU2800615C1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614468C2 |
| КОНТРОЛЛЕР КРАНА МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228867C1 |
| КОНТРОЛЛЕР | 2005 |
|
RU2286898C1 |
| УСТРОЙСТВО ИНТЕЛЛЕКТУАЛЬНОЙ БОРТОВОЙ АППАРАТУРЫ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2487035C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| ДАТЧИК ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ ТОРМОЗНОЙ ПЕДАЛИ, ИМЕЮЩИЙ ФУНКЦИЮ ПЕРЕКЛЮЧЕНИЯ ЛАМПЫ ТОРМОЗНОГО СИГНАЛА | 2011 |
|
RU2490148C2 |
Изобретение относится к устройству управления локомотивами. Устройство ввода команд содержит привод, в котором установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик. Дополнительно устройство содержит тормозные колодки, расположенные внутри диска и равномерно упирающиеся в стационарные стенки корпуса устройства, три канала датчика угла, где каждый канал состоит из микросхемы с датчиками Холла и магнита. Держатель с магнитами закреплен на общей оси диска. Микросхемы закреплены на платах датчиков угла, объединенных в трехканальный блок датчиков угла. Все три канала датчиков угла объединены одной платой модуля контроллера, в состав которой входят три канала контроллера со своими источниками питания, два коммутатора двух выходных линий и два адаптера. Технический результат заключается в повышении надежности и увеличении срока эксплуатации устройства ввода команд. 1 з.п. ф-лы, 2 ил.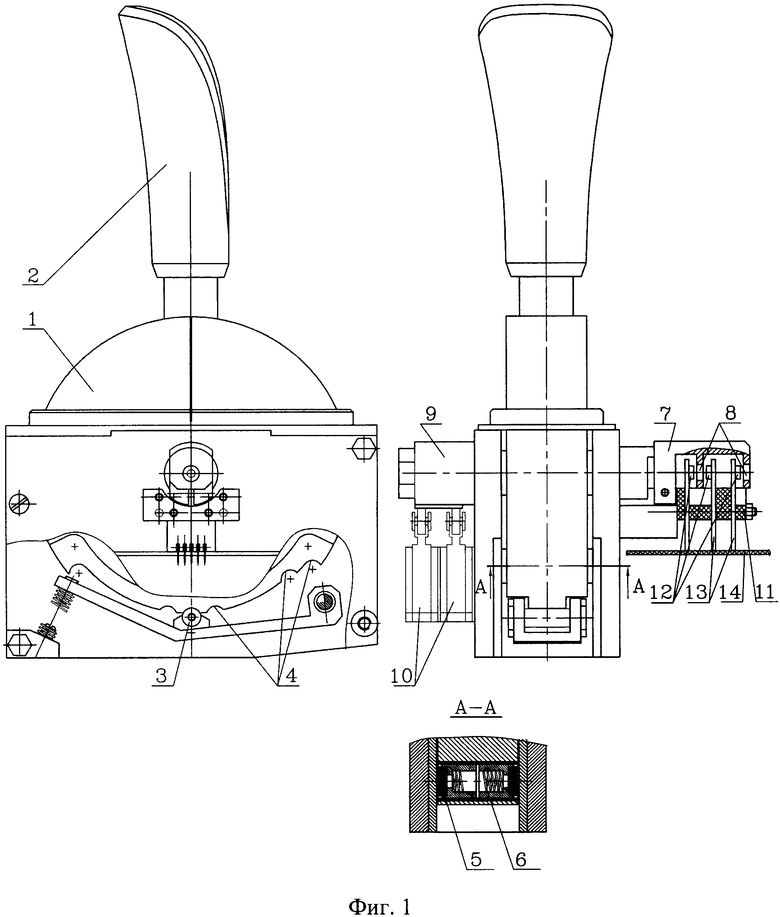
1. Устройство ввода команд, содержащее привод, в котором установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик, отличающееся тем, что содержит тормозные колодки, расположенные внутри диска и упирающиеся в стационарные стенки корпуса самого устройства, три канала датчика угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, держатель с магнитами закреплен на общей оси диска, при этом микросхемы закреплены на платах датчиков угла, объединенных в трехканальный блок датчиков угла, кроме того, все три канала датчиков угла объединены одной платой модуля контроллера, в состав которой входят три канала контроллера со своими источниками питания, два коммутатора двух выходных линий и два адаптера.
2. Устройство ввода команд по п. 1, отличающееся тем, что содержит два концевых выключателя, выполненных с функцией дополнительного дублирования кодовой команды.
| Огнетушащая установка автоматического действия | 1950 |
|
SU95894A1 |
| 0 |
|
SU174021A1 | |
| ЗАДАТЧИК КОМАНД УПРАВЛЕНИЯ | 2015 |
|
RU2644143C2 |
| Машина для наполнения мешков сыпучим материалом | 1930 |
|
SU43401A1 |
| FR 2972073 A1, 31.08.2012. | |||

