Изобретение относится к технике летательных аппаратов (ЛА) и предназначено для использования в системах наведения управляемых ракет и самолетов.
Известен способ управления ракетой с аэродинамическими рулями, включающий измерение отклонения ракеты от заданного направления полета, формирование в связанной с ракетой системе координат, в соответствии с измеренным отклонением ракеты, управляющего сигнала рулевой машинкой ракеты, усиление его и соответствующее отклонение рулевой машинкой аэродинамических рулей относительно продольной оси ракеты ([1], H.T.Кузовков. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976, стр.232-233, 237-238).
Известный способ управления обладает недостатками, определяемыми тем, что использование в контуре управления ракетой линейного пропорционального управления рулевой машинкой ракеты не обеспечивает пропорциональность угла отклонения рулей управляющему сигналу, так как угловое положение рулей в этом случае определяется не только управляющим сигналом, но и аэродинамической шарнирной нагрузкой, действующей на рули. При этом динамические свойства нагруженной рулевой машинки определяются не только собственными параметрами, но и зависят от аэродинамических характеристик ракеты и ее рулей. Для такого способа управления характерна существенная зависимость качества отработки сигнала управления ракетой от скоростного напора и аэродинамического шарнирного момента на рулях ракеты. Поэтому при стрельбе ракетой в условиях широкого диапазона изменения аэродинамической нагрузки не обеспечивается необходимая стабилизация динамических характеристик системы управления, что особенно характерно для скоростных ракет ([2], А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.179-183). Недостаточная стабильность характеристик исполнительного органа ракеты - нагруженной рулевой машинки приводит к снижению точности наведения ракеты, а в отдельных случаях (например, в режиме перекомпенсации при положительном шарнирном моменте на рулях) может вызвать неустойчивость ее управления.
Известен способ управления ЛА - самолетом, включающий формирование системой управления (чувствительными элементами) самолета управляющего сигнала автоколебательным приводом аэродинамических рулей и соответствующее отклонение этим приводом рулей управления ([3], В.А.Бесекерский, Е.П.Попов. Теория систем автоматического регулирования. - М.: Наука, 1975, стр.615).
Известен также способ управления ракетой с автоколебательным приводом аэродинамических рулей, включающий формирование системой управления управляющего сигнала приводом аэродинамических рулей и соответствующее отклонение автоколебательным приводом аэродинамических рулей относительно продольной оси ракеты ([4], В.И.Бабичев, В.В.Ветров, А.В.Игнатов, А.Р.Орлов. Основы устройства и функционирования артиллерийских управляемых снарядов. - Тула: Издательство КБП, 2003, стр.54, 60-61).
В известных способах управления за счет организации, посредством обратной связи, охватывающей введенный релейный элемент и рулевую машинку, в контуре привода аэродинамических рулей автоколебательного режима обеспечивается стабилизация его коэффициента передачи при изменениях собственных параметров привода и аэродинамической шарнирной нагрузки рулей (коэффициент передачи разомкнутого контура привода на частоте автоколебаний поддерживается постоянным и равным 0.5). При этом выходная координата привода - угол отклонения рулей представляет собой совокупность, состоящую из высокочастотной автоколебательной составляющей и составляющей, определяемой отработкой приводом медленно меняющегося (относительно автоколебательной составляющей) управляющего сигнала, сформированного системой управления ЛА. Так как обеспечение точности работы и свойств стабилизации автоколебательной системы сопровождается самонастройкой величин амплитуды и частоты автоколебаний выходной координаты, то при широком диапазоне изменения параметров ЛА и аэродинамической нагрузки рулей их значения могут стать недопустимыми. Увеличение амплитуды автоколебаний рулей повышает индуктивную составляющую аэродинамического сопротивления ЛА, что в свою очередь приводит к потере им скорости и снижению его динамических характеристик и зоны поражения. Частота автоколебаний руля, зависящая от условий функционирования системы, может совпасть с частотами возможных упругих колебаний корпуса ЛА, что может привести к нарушению его прочностных характеристик.
Известен способ управления автоколебательной системой, включающий организацию режима вынужденных колебаний ее выходной координаты за счет формирования и введения в прямой тракт управления системы внешних высокочастотных периодических колебаний ([5], Под редакцией В.В.Солодовникова. Теория автоматического регулирования, книга 3, часть 2. - М.: Машиностроение, 1969, стр.9-10, 51-52).
В данном способе управления за счет внешних высокочастотных периодических колебаний происходит подавление автоколебательного режима системы и устанавливается режим вынужденных периодических колебаний с частотой внешнего воздействия. Такой режим работы получил название вибрационной линеаризации или синхронного режима.
Наиболее близким к предлагаемому является способ управления ЛА с автоколебательным приводом аэродинамических рулей с вибрационной линеаризацией системы управления, включающий формирование системой управления управляющего сигнала приводом аэродинамических рулей и соответствующее отклонение автоколебательным приводом аэродинамических рулей ([3], стр.615, 660-665).
Известный способ управления основан на том, что введение внешних высокочастотных колебаний на вход релейного элемента автоколебательного привода приводит к нарушению условия существования автоколебаний в его контуре, при этом происходит захват внешних периодических колебаний и в системе устанавливается режим вынужденных колебаний. Таким образом, в результате вибрационной линеаризации выходная координата системы - угол отклонения рулей содержит наряду с составляющей, определяемой отработкой управляющего сигнала системы управления ЛА, составляющую вынужденных колебаний на частоте внешнего периодического воздействия, амплитуда которой может быть меньше амплитуды автоколебаний. Это предопределяет возможность задавать желательные параметры высокочастотных колебаний управляющих рулей. Однако практическое использование такого способа управления ЛА вызывает определенные трудности, которые связаны с тем, что процедура выбора параметров внешних линеаризующих колебаний для управления ЛА с допустимыми желательными параметрами колебаний рулей полностью технически не определена и обладает недостатками, имеющими существенное значение, так как не учитывает изменения в процессе управляемого полета ЛА собственных параметров контура рулевого привода и аэродинамической нагрузки рулей. Так, задание частоты внешнего линеаризующего сигнала, исходя только из желательной частоты высокочастотных колебаний рулей, без учета динамики автоколебательного привода и условий его работы, может привести к нарушению устойчивости его функционирования и, соответственно, к срыву управления. Ввиду того, что аэродинамическая шарнирная нагрузка на рулях в процессе управляемого полета ЛА может изменяться как по величине, так и по знаку (от нагрузки пружинной до нагрузки перекомпенсации, и наоборот, в зависимости от положения центра давления руля относительно положения оси его вращения), то задание постоянной амплитуды внешних линеаризующих колебаний может приводить к нарушению условия захвата системой внешних колебаний, т.е. восстановлению автоколебательного режима рулевого привода и, соответственно, к неконтролируемым параметрам колебаний рулей с недопустимой амплитудой и, как следствие, к потере скорости ракетой и ее динамических характеристик.
Задачей настоящего изобретения является повышение динамических характеристик управляемого полета ЛА с автоколебательным приводом аэродинамических рулей и расширение условий его применения.
Поставленная задача решается тем, что в способе управления ЛА с автоколебательным приводом аэродинамических рулей с вибрационной линеаризацией системы управления ЛА, включающем формирование системой управления ЛА управляющего сигнала автоколебательным приводом аэродинамических рулей и соответствующее отклонение приводом аэродинамических рулей, новым является то, что предварительно до запуска ЛА имитируют действие аэродинамической нагрузки рулей автоколебательного привода и определяют функцию чувствительности амплитуды автоколебаний привода к величине аэродинамической нагрузки рулей и функцию ожидаемого смещения координаты центра давления аэродинамических рулей относительно координаты положения их оси вращения в зависимости от времени полета ЛА, выбирают амплитуду Aв и частоту fв линеаризующего сигнала, а в процессе управления ЛА амплитуду Ав линеаризующего сигнала программно изменяют с учетом функции чувствительности амплитуды автоколебаний привода к величине аэродинамической нагрузки рулей пропорционально функции ожидаемого смещения координаты центра давления аэродинамических рулей относительно координаты положения их оси вращения.
В предлагаемом способе управления ЛА с автоколебательным приводом аэродинамических рулей с вибрационной линеаризацией системы управления ЛА выбирают амплитуду Ав и частоту fв линеаризующего сигнала в соответствии с соотношениями


где  - ожидаемая амплитуда автоколебаний привода аэродинамических рулей при нулевой аэродинамической нагрузке рулей;
- ожидаемая амплитуда автоколебаний привода аэродинамических рулей при нулевой аэродинамической нагрузке рулей;
δm - величина максимального угла отклонения аэродинамических рулей;
k1 - коэффициент запаса по амплитуде, выбираемый из условия обеспечения требуемых запасов устойчивости контура привода аэродинамических рулей;
δk - допустимая амплитуда колебаний аэродинамических рулей ЛА на частоте fв линеаризующего сигнала;
Xm - максимальный ход распределительного устройства рулевой машинки привода аэродинамических рулей;
Ал(2πfв) - расчетное значение на частоте fв линеаризующего сигнала амплитудной частотной характеристики совокупности элементов контура привода аэродинамических рулей без учета его релейного элемента;
π - число «пи», равное 3.14…,
при выполнении условий сопряжения частот

где  - ожидаемая по времени полета частота автоколебаний привода аэродинамических рулей;
- ожидаемая по времени полета частота автоколебаний привода аэродинамических рулей;
fЭП - максимальная рабочая частота электромеханического преобразователя рулевой машинки привода аэродинамических рулей, при которой обеспечивается отклонение рулей до максимальных угловых положений δm при отработке управляющего сигнала привода;
f1 - ожидаемая по времени полета максимальная частота первого тона упругих поперечных колебаний планера ЛА;
k2, k3, k4 - коэффициенты запаса по сопрягаемым частотам, выбираемые из условия обеспечения требуемой точности отработки приводом сигналов управления при ограниченном быстродействии преобразователя и возможных упругих колебаниях планера ЛА.
В предлагаемом способе управления ЛА с автоколебательным приводом аэродинамических рулей с вибрационной линеаризацией системы управления ЛА амплитуду Ав линеаризующего сигнала программно изменяют пропорционально коэффициенту, определяемому по соотношению

где  - функция чувствительности амплитуды автоколебаний рулевого привода к величине аэродинамической нагрузки рулей;
- функция чувствительности амплитуды автоколебаний рулевого привода к величине аэродинамической нагрузки рулей;
ΔXd(t) - функция ожидаемого смещения координаты положения центра давления рулей относительно координаты положения оси их вращения в зависимости от время t полета ЛА.
Предлагаемый способ управления ЛА обеспечивается следующим образом. Предварительно следует отметить, что разработка управляемого ЛА и ее автоколебательного привода рулей включает в себя определение траекторий полета ЛА, скорости его движения, углов атаки, параметров аэродинамической нагрузки рулей, функции изменения координаты положения центра давления руля по времени полета ([6], А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. - М.: Оборонгиз, 1962, стр.85-92, 328-334), частотных (амплитудной и фазовой) характеристик привода рулей, параметров его автоколебаний, условий их существования и чувствительности к условиям полета ЛА ([7], Б.Н.Петров и др. Принципы построения и проектирования самонастраивающихся систем управления. - М.: Машиностроение, 1972, стр.233-238) и т.д.
Способ управления предполагает проведение ряда последовательных операций до запуска ЛА и в процессе его управляемого полета. В соответствии с этим заранее до запуска ЛА имитируют в лабораторных условиях или расчетным путем действие аэродинамической нагрузки рулей автоколебательного привода и определяют функцию чувствительности амплитуды автоколебаний рулевого привода к величине аэродинамической нагрузки рулей

где Мш - аэродинамический шарнирный момент рулей,
ожидаемую амплитуду  автоколебаний при отсутствии аэродинамической нагрузки рулей, амплитудную частотную характеристику линейной части контура привода аэродинамических рулей Aл(2πf), где f - частота (т.е. совокупности элементов контура привода без учета его релейного элемента) и функцию ожидаемого смещения координаты положения центра давления рулей ΔXd(t) относительно координаты положения оси их вращения в зависимости от время t полета ЛА.
автоколебаний при отсутствии аэродинамической нагрузки рулей, амплитудную частотную характеристику линейной части контура привода аэродинамических рулей Aл(2πf), где f - частота (т.е. совокупности элементов контура привода без учета его релейного элемента) и функцию ожидаемого смещения координаты положения центра давления рулей ΔXd(t) относительно координаты положения оси их вращения в зависимости от время t полета ЛА.
Затем на этом этапе, т.е. до запуска ЛА, выбирают амплитуду Aв внешнего линеаризующего сигнала в соответствии с соотношением (1). Минимальное значение амплитуды Aв из соотношения (1) обеспечивает гарантированное условие захвата внешних колебаний, задаваемых линеаризующим сигналом, т.е. реализацию устойчивого процесса вибрационной линеаризации ([7], стр.238).
Максимальное значение амплитуды Ав линеаризующего сигнала из соотношения (1) для режима вибрационной линеаризации системы ограничивается условием обеспечения устойчивости контура рулевого привода, определяемой запасами устойчивости по амплитуде и фазе, допустимые значения которых задаются выбором значения коэффициента запаса по амплитуде k1 из диапазона значений k=0.5…2 по отношению к максимальному значению угла отклонения рулей δm.
Также до запуска ЛА задают допустимое значение амплитуды δk колебаний аэродинамических рулей на частоте fв вынужденных колебаний при реализуемой вибрационной линеаризации, исходя, например, из допустимой величины потери скорости ракеты за счет индуктивного сопротивления, определяемого колебаниями рулей амплитудой δk. Затем по соотношению (2) выбирают потребную частоту fв внешнего линеаризующего сигнала. Указанное соотношение вытекает из условия существования в контуре рулевого привода периодического режима

где Wн - передаточный коэффициент релейного элемента рулевого привода по первой гармонике, равный

Wл(j2πfв) - значение на частоте fв вынужденных колебаний передаточной функции совокупности элементов контура привода аэродинамических рулей без учета его релейного элемента (т.е. значение передаточной функции линейной части привода). При этом выбранная частота fв должна удовлетворять условиям сопряжения частот, задаваемым соотношением (3):
- выполнение первого условия  обеспечивает точность отработки приводом управляющего сигнала системы управления в режиме вибрационной линеаризации с амплитудой δk вынужденных колебаний меньшей амплитуды автоколебаний;
обеспечивает точность отработки приводом управляющего сигнала системы управления в режиме вибрационной линеаризации с амплитудой δk вынужденных колебаний меньшей амплитуды автоколебаний;
- выполнение второго условия fв≤k3fЭП обеспечивает реализацию вынужденных колебаний в контуре рулевого привода, период которых не превышает времени срабатывания электромагнитного преобразователя рулевой машинки привода и, соответственно, обеспечивает работу рулевого привода в режиме вибрационной линеаризации при отработке управляющего сигнала системы управления с отклонением рулей до возможных максимальных угловых положений;
- выполнение третьего условия fв≥k4f1 обеспечивает реализацию вынужденных высокочастотных колебаний рулей на частоте за пределами диапазона основной частоты f1 возможных упругих колебаний корпуса ЛА.
Значения коэффициентов запаса по частотам сопряжения, равные соответственно k2=2…3, k3=1.5…2, k4=0.3…0.5, обеспечивают требуемую точность отработки приводом сигналов управления с учетом ограниченного быстродействия его электромеханического преобразователя и возможных упругих колебаний планера ЛА.
По выбранным значениям амплитуды Aв и частоты fв формируют закон изменения внешнего линеаризующего сигнала в виде периодической функции (гармонической, пилообразной и т.п. формы) от времени t полета ЛА, например, в виде

Далее сформированный закон для линеаризующих колебаний вида (8) задается в виде сигнала в бортовой аппаратуре управления ЛА, в память которой также заносится программный коэффициент  изменения амплитуды линеаризующего сигнала, величина которого в процессе полета изменяется пропорционально ожидаемому смещению ΔXd(t) координаты центра давления аэродинамических рулей относительно координаты положения оси вращения рулей с учетом программной функции
изменения амплитуды линеаризующего сигнала, величина которого в процессе полета изменяется пропорционально ожидаемому смещению ΔXd(t) координаты центра давления аэродинамических рулей относительно координаты положения оси вращения рулей с учетом программной функции  чувствительности амплитуды автоколебаний к величине аэродинамической нагрузки рулей в соответствии с соотношением (4).
чувствительности амплитуды автоколебаний к величине аэродинамической нагрузки рулей в соответствии с соотношением (4).
Далее операции предлагаемого способа управления выполняются после запуска ЛА непосредственно в процессе его управляемого полета.
При запуске ЛА, после начала работы его бортовой аппаратуры управления, в контуре привода аэродинамических рулей устанавливается автоколебательный режим с амплитудой  После подачи на вход рулевого привода внешних периодических колебаний вида (8) происходит их захват и в контуре привода устанавливается вынужденный режим периодических колебаний с заданными амплитудой δk и частотой fв отклонения рулей, т.е. реализуется в системе управления режим вибрационной линеаризации. Далее управляющий сигнал, сформированный системой управления ЛА в соответствии с измеренным рассогласованием относительно заданного направления полета, подается на вход рулевого привода и отрабатывается им в режиме вибрационной линеаризации и в соответствии с этим ЛА выбирает имеющееся рассогласование с заданной линией наведения. В процессе полета ЛА амплитуда линеаризующего сигнала, сформированного в соответствии с законом (8), перед подачей на вход привода корректируется в соответствии с значением программного коэффициента по соотношению
После подачи на вход рулевого привода внешних периодических колебаний вида (8) происходит их захват и в контуре привода устанавливается вынужденный режим периодических колебаний с заданными амплитудой δk и частотой fв отклонения рулей, т.е. реализуется в системе управления режим вибрационной линеаризации. Далее управляющий сигнал, сформированный системой управления ЛА в соответствии с измеренным рассогласованием относительно заданного направления полета, подается на вход рулевого привода и отрабатывается им в режиме вибрационной линеаризации и в соответствии с этим ЛА выбирает имеющееся рассогласование с заданной линией наведения. В процессе полета ЛА амплитуда линеаризующего сигнала, сформированного в соответствии с законом (8), перед подачей на вход привода корректируется в соответствии с значением программного коэффициента по соотношению

обеспечивая тем самым устойчивый захват внешних колебаний в контуре привода и поддержание требуемых запасов его устойчивости в условиях возможного изменения амплитуды автоколебательного режима при изменении величины и знака аэродинамической нагрузки рулей по времени полета.
При таком управлении угол отклонения рулей кроме составляющей, определяемой отработкой приводом управляющего сигнала, сформированного системой управления, будет содержать вынужденную высокочастотную составляющую колебаний рулей, имеющую заданные амплитуду δk и частоту fв, что обеспечивает работоспособность системы управления и точность отработки сигналов управления, а также контролируемое индуктивное сопротивление ЛА при высокочастотных колебаниях рулей управления и сохранение динамических и прочностных характеристик ЛА.
Таким образом, введение в способ правления новых операций обеспечивает повышение динамических характеристик управляемого полета ЛА с автоколебательным приводом аэродинамических рулей и расширение условий его применения.
Предлагаемый способ управления ЛА может быть реализован системой управления, функциональная схема которой представлена на чертеже.
Система управления содержит аппаратуру управления ЛА (АУ) 1, включающую последовательно соединенные устройство измерения рассогласования ЛА с заданной линией наведения (УО) 2 и устройство формирования сигналов управления ЛА (УУ) 3, автоколебательный привод аэродинамических рулей (РП) 4, включающий последовательно соединенные сумматор (С) 5, первый вход которого подключен к выходу аппаратуры управления ЛА 1, усилитель мощности (У) 6, релейный элемент (РЭ) 7 и рулевую машинку (РМ) 8 в составе электромеханического преобразователя (ЭП) 9, распределительного устройства (РУ) 10 и исполнительного двигателя (ИД) 11, кинематически связанного с рулями ЛА (Р) 12, выход которого соединен через датчик обратной связи (ДУ) 13 со вторым входом сумматора 5, а также последовательно соединенные генератор линеаризующих колебаний (Г) 14 и блок умножения (УМ) 15, выход которого соединен с третьим входом сумматора 5, и устройство задания программного коэффициента изменения амплитуды линеаризующего сигнала (ПК) 16, выход которого соединен со вторым входом блока умножения 15.
Составляющие элементы системы управления: аппаратура управления ЛА 1 и автоколебательный привод аэродинамических рулей 4 с указанными составляющими их элементами представляют собой известные штатные элементы систем управления ракетой ([1], [4]).
Генератор линеаризующих колебаний 14, блок умножения 15 и устройство задания программного коэффициента изменения амплитуды линеаризующего сигнала 16, реализующее соотношение (4), могут быть выполнены, например, на базе операционных усилителей ([5], И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987, соответственно стр.206-207, стр.125, стр.178-180).
Система управления ЛА работает следующим образом. При запуске ЛА его привод аэродинамических рулей 4 приходит в рабочее состояние, при этом в его контуре устанавливается автоколебательный режим с амплитудой  и частотой
и частотой  После подачи на вход рулевого привода с генератора 14 внешних периодических колебаний вида (8) происходит их захват и в контуре привода устанавливается вынужденный режим высокочастотных периодических колебаний с заданными амплитудой δk и частотой fв отклонения рулей, т.е. реализуется режим вибрационной линеаризации системы управления.
После подачи на вход рулевого привода с генератора 14 внешних периодических колебаний вида (8) происходит их захват и в контуре привода устанавливается вынужденный режим высокочастотных периодических колебаний с заданными амплитудой δk и частотой fв отклонения рулей, т.е. реализуется режим вибрационной линеаризации системы управления.
Аппаратура управления ЛА 1 определяет его рассогласование относительно заданной линии наведения, по которому формирует сигнал управления ЛА. Далее сформированный сигнал управления ЛА поступает на вход автоколебательного привода аэродинамических рулей 4. При таком управлении угол отклонения рулей наряду с составляющей, определяемой отработкой приводом медленно меняющегося управляющего сигнала, сформированного системой управления, будет содержать вынужденную высокочастотную составляющую колебаний рулей, имеющую заданные амплитуду δk и частоту fв.
В процессе полета ЛА амплитуда внешнего линеаризующего сигнала с генератора 7 корректируется в блоке умножения 15 в соответствии изменением программного сигнала, поступающего на его второй вход с выхода устройства задания программного коэффициента 16. Этим самым обеспечивается устойчивый режим вынужденных высокочастотных колебаний рулей с заданными частотой и амплитудой и поддержание запасов устойчивости контура привода в условиях возможного изменения величины и знака аэродинамической нагрузки рулей по времени полета, что, в свою очередь, обеспечивает работоспособность системы управления, контролируемое индуктивное сопротивление ЛА, определяемое высокочастотными колебаниями рулей, и сохранение динамических и прочностных характеристик ЛА.
Таким образом, предлагаемое техническое решение обеспечивает повышение динамических характеристик управляемого полета и расширение условий применения ЛА, что выгодно отличает его от известных.
Источники информации
1. Н.Т.Кузовков. Системы стабилизации летательных аппаратов. - М.: Высшая школа, 1976.
2. А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965.
3. В.А.Бесекерский, Е.П.Попов. Теория систем автоматического регулирования. - М.: Наука, 1975.
4. В.И.Бабичев, В.В.Ветров, А.В.Игнатов, А.Р.Орлов. Основы устройства и функционирования артиллерийских управляемых снарядов. - Тула: Издательство КБП, 2003.
5. Под редакцией В.В.Солодовникова. Теория автоматического регулирования, книга 3, часть 2. - М.: Машиностроение, 1969.
6. А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. - М.: Оборонгиз, 1962.
7. Б.Н.Петров и др. Принципы построения и проектирования самонастраивающихся систем управления. - М.: Машиностроение, 1972.
8. И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536838C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |
| Способ управления рулевым приводом управляемой ракеты | 2023 |
|
RU2823085C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| Способ пропорционального управления воздушно-динамическим рулевым приводом ракеты и устройство для его реализации | 2016 |
|
RU2630462C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
Изобретение предназначено для использования в системах наведения управляемых ракет и самолетов. В способе управления летательным аппаратом с автоколебательным приводом аэродинамических рулей с вибрационной линеаризацией системы управления осуществляется формирование системой управления летательного аппарата управляющего сигнала автоколебательным приводом рулей и соответствующее отклонение приводом рулей. Предварительно до запуска летательного аппарата имитируют действие аэродинамической нагрузки рулей автоколебательного привода и определяют функцию чувствительности амплитуды автоколебаний привода к величине аэродинамической нагрузки рулей и функцию ожидаемого смещения координаты центра давления аэродинамических рулей относительно координаты положения их оси вращения в зависимости от времени полета летательного аппарата. Выбирают амплитуду и частоту линеаризующего сигнала. В процессе управления летательным аппаратом амплитуду линеаризующего сигнала программно изменяют с учетом функции чувствительности амплитуды автоколебаний привода к величине аэродинамической нагрузки рулей пропорционально функции ожидаемого смещения координаты центра давления аэродинамических рулей относительно координаты положения их оси вращения. Обеспечивается повышение динамических характеристик летательного аппарата и расширение условий его применения. 2 з.п. ф-лы, 1 ил.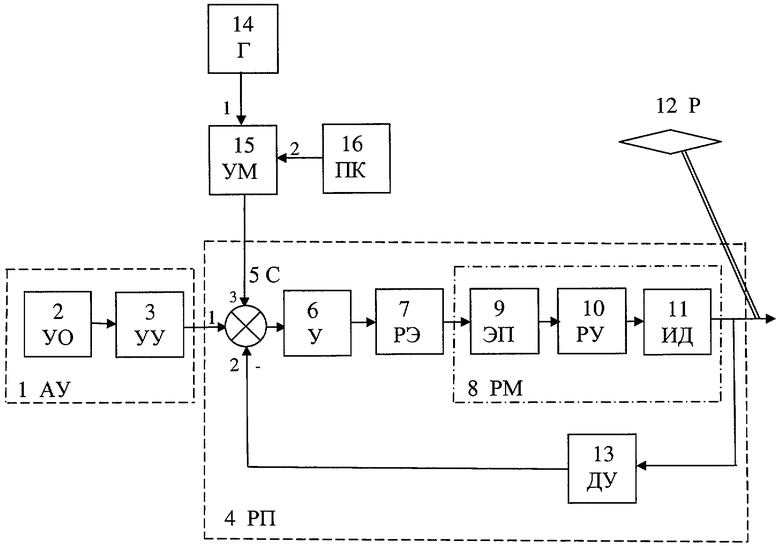
1. Способ управления летательным аппаратом с автоколебательным приводом аэродинамических рулей с вибрационной линеаризацией системы управления летательного аппарата, включающий формирование системой управления летательного аппарата управляющего сигнала автоколебательным приводом аэродинамических рулей и соответствующее отклонение приводом аэродинамических рулей, отличающийся тем, что предварительно до запуска летательного аппарата имитируют действие аэродинамической нагрузки рулей автоколебательного привода и определяют функцию чувствительности амплитуды автоколебаний привода к величине аэродинамической нагрузки рулей и функцию ожидаемого смещения координаты центра давления аэродинамических рулей относительно координаты положения их оси вращения в зависимости от времени полета летательного аппарата, выбирают амплитуду Ав и частоту fв линеаризующего сигнала, а в процессе управления летательным аппаратом амплитуду Ав линеаризующего сигнала программно изменяют с учетом функции чувствительности амплитуды автоколебаний привода к величине аэродинамической нагрузки рулей пропорционально функции ожидаемого смещения координаты центра давления аэродинамических рулей относительно координаты положения их оси вращения.
2. Способ по п.1, отличающийся тем, что выбирают амплитуду Ав и частоту fв линеаризующего сигнала в соответствии с соотношениями

 ,
,
где  - ожидаемая амплитуда автоколебаний привода аэродинамических рулей при нулевой аэродинамической нагрузке рулей;
- ожидаемая амплитуда автоколебаний привода аэродинамических рулей при нулевой аэродинамической нагрузке рулей;
δm - величина максимального угла отклонения аэродинамических рулей;
k1 - коэффициент запаса по амплитуде, выбираемый из условия обеспечения требуемых запасов устойчивости контура привода аэродинамических рулей;
δk - допустимая амплитуда колебаний аэродинамических рулей летательного аппарата на частоте fв линеаризующего сигнала;
Xm - максимальный ход распределительного устройства рулевой машинки привода аэродинамических рулей;
Ал(2πfв) - расчетное значение на частоте fв линеаризующего сигнала амплитудной частотной характеристики совокупности элементов контура привода аэродинамических рулей без учета его релейного элемента;
π - число «пи», равное 3,14…, при выполнении условий сопряжения частот

fв≤k3fЭП,
fв≥k4f1,
где  - ожидаемая по времени полета частота автоколебаний привода аэродинамических рулей;
- ожидаемая по времени полета частота автоколебаний привода аэродинамических рулей;
fЭП - максимальная рабочая частота электромеханического преобразователя рулевой машинки привода аэродинамических рулей, при которой обеспечивается отклонение рулей до максимальных угловых положений δm при отработке управляющего сигнала привода;
f1 - ожидаемая по времени полета максимальная частота первого тона упругих поперечных колебаний планера летательного аппарата;
k2, k3, k4 - коэффициенты запаса по сопрягаемым частотам, выбираемые из условия обеспечения требуемой точности отработки приводом сигналов управления при ограниченном быстродействии преобразователя и возможных упругих колебаниях планера летательного аппарата.
3. Способ по п.1, отличающийся тем, что амплитуду Ав линеаризующего сигнала программно изменяют пропорционально коэффициенту, определяемому по соотношению

где  - функция чувствительности амплитуды автоколебаний рулевого привода к величине аэродинамической нагрузки рулей;
- функция чувствительности амплитуды автоколебаний рулевого привода к величине аэродинамической нагрузки рулей;
ΔXd(t) - функция ожидаемого смещения координаты положения центра давления рулей относительно координаты положения оси их вращения в зависимости от время t полета летательного аппарата.
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| Стенд для испытаний на износостойкость холодильных компрессоров | 1986 |
|
SU1408164A1 |
| US 7249730 B1, 31.07.2007. | |||

