Изобретение относится к области приборостроения или конструирования устройств для защиты от вибраций активным способом измерительной и технологической аппаратуры в стационарных условиях и на транспортных средствах.
Существует большое количество аналитической и технологической аппаратуры, нуждающейся в эффективной защите от вибраций (микроускорений). Это, например, оптическая интерферометрия, рентгеновская дифракционная техника, микрогравиметры, зондовые сканирующие микроскопы. Известно, однако, что пассивные системы виброзащиты неэффективны, особенно при низких частотах. Поэтому для всех указанных выше применений необходимы активные системы защиты, или авторегуляторы с силовой отрицательной обратной связью, имеющие в своем составе акселерометры, электронные цепи и магнитоэлектрические движители. Поскольку в защите нуждаются все шесть мод колебаний защищаемых объектов (три поступательные и три торсионные), системы активной защиты от микроускорений представляют собой многоканальные авторегуляторы.
Известны фирмы HERZAN (США) [www.herzan.com] и HALZYONICS (Германия, США) [www.halcyonics.de, www.halcyonics.com], производящие широкий набор активных виброзащитных столов размерами от 400×400×120 мм3 до 1000×800×130 мм3 для нагрузок от 60 кг до 1200 кг. Механическая часть этих приборов состоит из панели (плиты), установленной на пружинах, и расположенных на ней восьми пар акселерометр - магнитоэлектрический движитель. Электрические цепи авторегулирования или отрицательной обратной связи содержат восемь независимых контуров, включающих указанные пары акселерометр-магнитоэлектрический движитель. Такая конструкция позволяет подавлять все шесть мод колебаний панели (с установленным на ней защищаемым прибором), три поступательные, LX, LY, LZ, и три торсионные, TX, TY, TZ. Все эти виброзащитные устройства характеризуются коэффициентом подавления колебаний от 35 дБ до 40 дБ. В области низких частот (ниже 2 Гц) они неэффективны, а максимальный коэффициент подавления колебаний достигается только при 10 Гц. Эти характеристики, как будет показано ниже, являются предельными из-за "паразитного" сигнала наклона акселерометров, возникающего в поле притяжения Земли, и подавляющего "полезный" сигнал при низких частотах. Любой из виброзащитных столов указанных выше фирм-производителей может служить прототипом разработанного устройства, так как они все имеют идентичную конструкцию.
В то же время существует возможность подавить (скомпенсировать) паразитные сигналы наклона акселерометров и существенно расширить активный диапазон частот виброзащитных устройств в область низких частот. Для этого, во-первых, необходимо использовать элементы конструкции виброзащитного устройства, предложенные в Патенте РФ №2275672 от 19 апреля 2004 г. "Система активной защиты от микроускорений/вибраций с разделением мод колебаний" В.А.Мелик-Шахназарова, Б.Г.Захарова, Е.М.Нагаева, а именно, управление по сигналам трех поступательных и трех торсионных мод колебаний а не отдельных акселерометров, как в коммерческих приборах.
На Фиг.1 показано возможное (один из вариантов) расположение на виброзащитной панели восьми акселерометров и восьми магнитоэлектрических движителей (каждая стрелка обозначает коаксиальную пару акселерометр-магнитоэлектрический движитель). Для того чтобы от восьмиканальной схемы управления по координатам (или ускорениям) отдельных акселерометров перейти к управлению шести отдельных мод колебаний, необходимо преобразовать сигналы акселерометров U1...U8 в сигналы продольных U(LX), U(LY), U(LZ) и торсионных U(TX), U(TY), U(TZ) мод колебаний следующим образом:

Очевидно, что такое преобразование может быть достаточно точно осуществлено с помощью сумматоров. Для того чтобы выходные сигналы шести авторегуляторов преобразовать в восемь сигналов, поступающих на магнитоэлектрические движители, необходимо произвести обратное преобразование, симметричное преобразованию, описываемому формулами (1).
Блок-схема активного виброзащитного устройства, функционирующего описанным выше образом, представлена на Фиг.2.Схематически обозначена панель (бокс) 9, установленная на пружинах 10. Группа из восьми акселерометров 11 и восьми магнитоэлектрических движителей 12 также показана условно, реально она может иметь вид, например, как показано на Фиг.1. На схеме видно, что стандартная замкнутая цепь авторегулирования состоит из: механического упругого подвеса (панель 9 на пружинах 10), акселерометров 11, электронного блока авторегулирования 14 и магнитоэлектрических движителей 12 (см. напр. [Трофимов А.И., Егупов Н.Д., Дмитриев А.Н. "Методы теории автоматического управления, ориентированные на применение ЭВМ". - М.: Энергоатомиздат, 1997. 656 с.] с обширным списком литературы). Дополнительными, новыми узлами в этой цепи являются преобразователи 13 и 15. Преобразователь 13 в соответствии с соотношениями (1) преобразует восемь сигналов акселерометров в сигналы шести мод колебаний, которые и поступают на шесть авторегуляторов 14. Выходы авторегуляторов поступают на преобразователь 15, который создает сигналы для восьми магнитоэлектрических движителей, то есть совершает преобразование, обратное по отношению к первому преобразователю 13. Функционирование блока 16, предназначенного для коррекции или компенсации «паразитного» сигнала наклона акселерометров, совершающих угловые колебания (вибрации) в поле притяжения Земли, будет рассмотрено ниже.
Раздельное регулирование отдельных мод колебаний увеличивает устойчивость системы при высоких коэффициентах подавления колебаний; наибольший эффект будет наблюдаться для систем защиты, работающих в невесомости, а также если центр центрального эллипсоида инерции защищаемого объекта совпадает с центром симметрии группы акселерометров (на Фиг.1 это точка 0), а главные центральные оси инерции параллельны осям симметрии группы акселерометров (на Фиг.1 это координатные оси). [Патент РФ №2275672 от 19 апреля 2004 г. "Система активной защиты от микроускорений/вибраций с разделением мод колебаний" В.А.Мелик-Шахназарова, Б.Г.Захарова, Е.М.Нагаева].
Покажем, что описанные выше новые элементы конструкции виброзащитных устройств: а) симметричная группа ортогонально ориентированных акселерометров (и соосных с ними магнитоэлектрических движителей), и б) разделение восьми каналов управления на шесть независимых цепей авторегулирования, позволяют расширить их возможности за счет подавления «паразитного» сигнала наклона акселерометров, совершающих угловые колебания (вибрации) в поле притяжения Земли.
Как видно из Фиг.1, часть акселерометров, установленных на панели, ориентированы вертикально, а другая часть - горизонтально. Рассмотрим «полезные» сигналы ускорения Ua и «паразитные» сигналы наклонов Uϕ, которые дают эти акселерометры при малых качаниях панели вокруг осей Ох и Oy. Если Fa(t)=ma(t) сила, действующая на пьезоэлемент (или другое измерительное устройство) акселерометра с массой m при ускорении a(t), то сигнал акселерометра Ua(t)=Ka(t) (здесь К - коэффициент передачи акселерометра по напряжению).
Рассмотрим схематически показанные на Фиг.3 угловые колебания панели (бокса) Δϕ(t) с установленными на ней горизонтально и вертикально ориентированными акселерометрами, обозначенными стрелками. При колебаниях с частотой ω и малой амплитудой Δϕ, амплитуда ускорения am=Аω2, где А=L·Δϕ линейная амплитуда колебаний акселерометра, a L расстояние от акселерометра до оси качания или характерный размер прибора. Амплитуда сигнала акселерометра, таким образом, равна:

Очевидно, что сигналы ускорения (2) не зависят от ориентации акселерометров. Иная ситуация наблюдается для «паразитных» сигналов наклона акселерометров в поле тяготения Земли. Очевидно, что для вертикально ориентированного акселерометра составляющая силы тяжести, направленная вдоль его оси чувствительности

где g величина ускорения свободного падения а ϕ угол наклона относительно исходной вертикальной ориентации. Для акселерометра, ориентированного горизонтально, аналогичная сила описывается выражением

При угловых периодических колебаниях панели (бокса) с малыми амплитудами Δϕ силы  и
и  также изменяются периодически с амплитудами, которые можно получить, дифференцируя (3) и (4):
также изменяются периодически с амплитудами, которые можно получить, дифференцируя (3) и (4):


Для амплитуд сигнала вертикально и горизонтально ориентированных акселерометров, соответственно, получаем


Рассмотрим вначале виброзащитную панель, установленную неподвижно на горизонтальной поверхности. В этом случае углы наклона ϕ вертикально и горизонтально ориентированных акселерометров равны нулю, поэтому sinϕ≈Δϕ, cosϕ≈1, так что


Отношения «паразитного» сигнала наклона акселерометров к «полезному» сигналу ускорения можно получить из соотношений (2), (9) и (10),

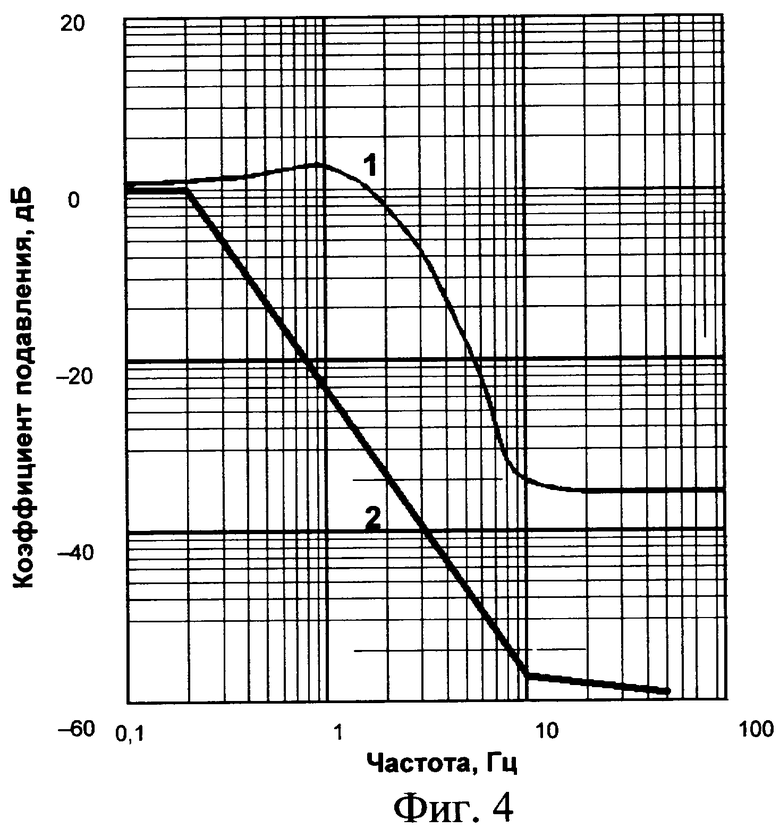
Из соотношений (11) и (12) видно, что помеха от сигнала наклона акселерометров в обоих случаях быстро (квадратично) увеличивается с понижением частоты. Так, для конструкции с L=20 см отношение  при ν=2.7 Гц и достигает значения 3 при ν=0.5 Гц. Видно, что частота около 2 Гц является предельной, ниже которой сигнал наклона акселерометров подавляет сигнал ускорения. Заметим, что для всех производящихся виброзащитных столов частота ≈2 Гц является граничной; в качестве примера на Фиг.4 (кривая 1) показана типичная частотная зависимость коэффициента подавления колебаний виброзащитного стола AVI-150 фирмы HALCYONICS. Видно, что ниже 2 Гц система неэффективна, а максимальный коэффициент подавления достигается при частоте 10 Гц.
при ν=2.7 Гц и достигает значения 3 при ν=0.5 Гц. Видно, что частота около 2 Гц является предельной, ниже которой сигнал наклона акселерометров подавляет сигнал ускорения. Заметим, что для всех производящихся виброзащитных столов частота ≈2 Гц является граничной; в качестве примера на Фиг.4 (кривая 1) показана типичная частотная зависимость коэффициента подавления колебаний виброзащитного стола AVI-150 фирмы HALCYONICS. Видно, что ниже 2 Гц система неэффективна, а максимальный коэффициент подавления достигается при частоте 10 Гц.
Сравнение (11) и (12) показывает, что  отличается от
отличается от  малым сомножителем Δϕ. Поскольку по оценке величина Δϕ≤10-3, очевидно, что влияние сигнала наклона для акселерометров, ориентированных вертикально, будет проявляться при значительно более низких частотах (ниже 0.1 Гц), чем для ориентированных горизонтально. Это очень важное обстоятельство, так как неискаженные сигналы вертикально ориентированных акселерометров могут быть использованы для создания цепей компенсации (подавления) сигналов наклона горизонтально ориентированных акселерометров.
малым сомножителем Δϕ. Поскольку по оценке величина Δϕ≤10-3, очевидно, что влияние сигнала наклона для акселерометров, ориентированных вертикально, будет проявляться при значительно более низких частотах (ниже 0.1 Гц), чем для ориентированных горизонтально. Это очень важное обстоятельство, так как неискаженные сигналы вертикально ориентированных акселерометров могут быть использованы для создания цепей компенсации (подавления) сигналов наклона горизонтально ориентированных акселерометров.
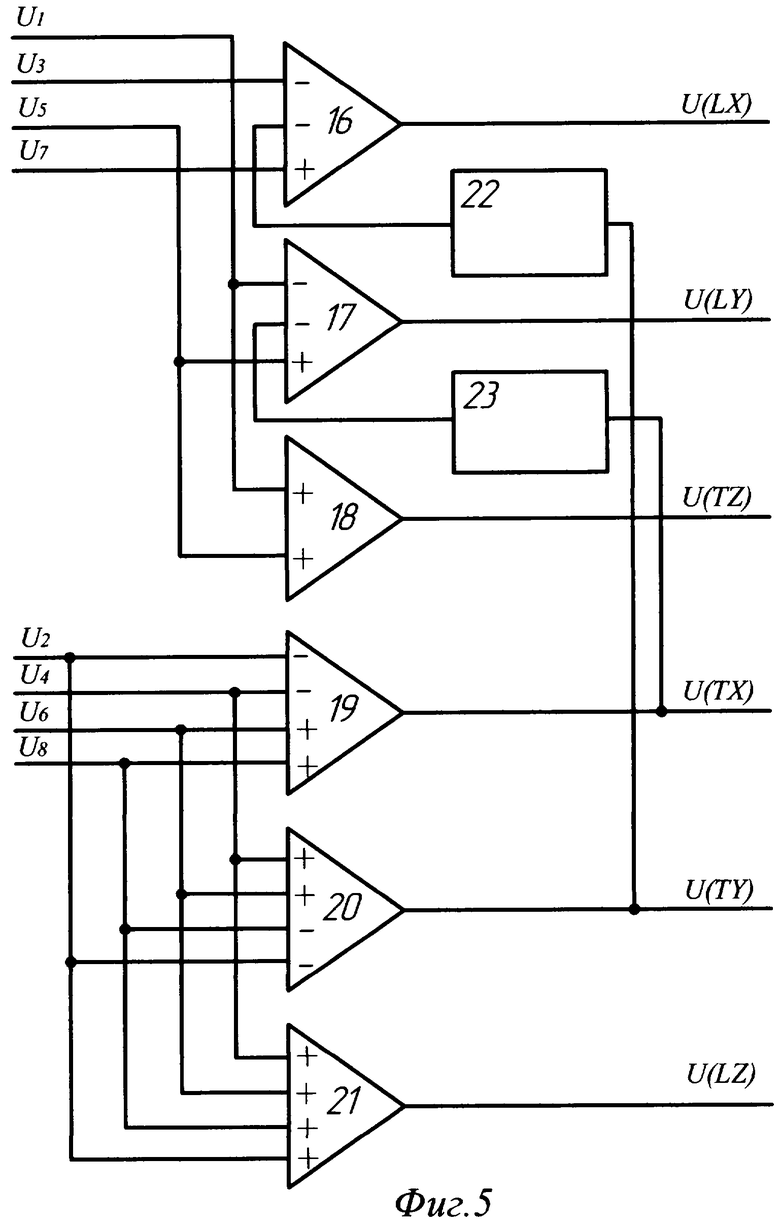
Обратимся вновь к Фиг.1, на которой показано расположение восьми акселерометров (и восьми соосных с ними магнитоэлектрических движителей) на панели виброзащитного стола. Видно, что акселерометры 2, 4, 6, 8 ориентированы вертикально, а 1, 3, 5, 7 - горизонтально. Рассмотрим качания панели вокруг оси Ох (или другой параллельной ей оси), то есть торсионную моду колебаний ТХ. Очевидно, что эта мода сопровождается наклонами акселерометров 1 и 5. Возникающий при этом "паразитный" сигнал, согласно (10) пропорционален величине Δϕ(t), очевидно, что подавить (компенсировать) его можно сигналом, пропорциональным этому углу. Для выделения такого сигнала нужно дважды проинтегрировать сигнал ускорения U(TX) торсионной моды колебаний, что дает угол наклона. Сложив его (с нужным знаком и коэффициентом) с сигналом ускорения трансляционной моды U(LY), получим сигнал U0(LY), очищенный от паразитного сигнала наклона

Аналогичным образом, дважды интегрируя сигнал ускорения U(TY), получаем сигнал, компенсирующий сигналы наклона акселерометров 3 и 7

В формулах преобразования (1) сигналы горизонтально ориентированных акселерометров 1 и 5 присутствуют также в сигнале торсионной моды U(TZ). Однако из Фиг.1 видно, что в сумме U5+U1 сигналы ускорения синфазны, а сигналы наклона противофазны, так что при достаточной идентичности измерительных цепей они взаимно уничтожаются. Поэтому для рассматриваемой виброзащитной конструкции достаточно двух компенсирующих цепей, функционирующих в соответствии с (13) и (14).
Схема на Фиг.5 показывает, как с помощью шести сумматоров 16-21 и двух двойных интеграторов 22, 23 осуществляется разделение сигналов управления, а также компенсация «паразитного» сигнала наклона акселерометров в поле притяжения Земли.
Итак, следующие новые элементы конструкции систем активной защиты от вибраций:
а) панель (рама) с симметричной группой ортогонально ориентированных акселерометров;
б) сумматоры, включенные по схеме, соответствующей соотношениям (1), осуществляющие разделение сигналов управления;
в) цепи (двойные интеграторы), измеряющие амплитуды угловых колебаний (вибраций) панели и компенсирующие сигналы наклона акселерометров по схеме, соответствующей уравнениям (13) и (14),
увеличивают устойчивость и расширяют активный диапазон в область низких частот. Максимальный сдвиг граничной частоты в сторону низких частот (в 30 и более раз) определяется точностью цепей интегрирования и компенсации.
Кривая 2 на Фиг.4 показывает, что новая схема управления, даже в самом простом исполнении (точность порядка 1%), в сравнении с коммерческими приборами (кривая 1), обеспечивает десятикратное понижение граничной частоты активного диапазона (от 2 Гц до 0.2 Гц), и десятикратное увеличение коэффициента подавления колебаний (от -40 дБ до -60 дБ). Ценность новой системы защиты очевидна уже потому что она, в отличие от коммерческих устройств, эффективна в области резонансов элементов конструкции зданий от 1 Гц до 8 Гц.
Описанная выше конструкция, как видно из приведенных формул, рассчитана на ее стационарную установку на горизонтальной поверхности (допустимый наклон не более 3°-5°). В то же время существует возможность сделать конструкцию защиты от вибраций нечувствительной к большим наклонам (до 20° и выше) при сохранении ее новых характеристик (понижение граничной частоты активного диапазона до 0.2 Гц и увеличение максимального коэффициента подавления колебаний более чем до 60 дБ). Такая конструкция будет пригодна для защиты от вибраций аппаратуры на вертолетах, самолетах, судах.
Для создания такой схемы следует вернуться к выражениям (7) и (8), из которых видно, что в отличие от неподвижной, расположенной горизонтально конструкции (ϕ≈0, sinϕ≈Δϕ, cosϕ≈1), теперь появляется новая переменная, угол наклона конструкции ϕ(t), который, в отличие от угловых колебаний (вибраций) Δϕ(t) может достигать значений порядка единицы. Кроме того, из выражений (7) и (8) видно, что теперь необходимо компенсировать сигналы наклона акселерометров, ориентированных и горизонтально, и вертикально. Сигналы компенсации, как видно, содержат угловую коррекцию, теперь они имеют вид произведений cosϕ(t)·Δϕ(t) и sinϕ(t)·Δϕ(t).
Очевидно, что для реализации этой схемы конструкция прибора должна быть дополнена двумя наклономерами, которые будут измерять углы наклона аппарата относительно осей Ох и Oy. Такие устройства, измеряющие отклонение от геовертикали компенсационным способом с точностью (0,1-1)%, не намного сложнее акселерометров, использующихся для измерения микроускорений.
На Фиг.6 показана блок-схема, устройства компенсации сигнала наклона акселерометров при больших углах наклона панели ϕ для двух сигналов, U(LY) и U(LX). На схеме условно показана панель 24, с установленными на ней акселерометрами 1, 2, 5 и 8 (нумерация которых совпадает с Фиг.1), и наклономером 25, измеряющим угол поворота панели ϕ относительно оси Ox. Сигналы акселерометров, как видно из схемы, поступают на сумматоры 26, 27 и 28 для выделения, согласно выражениям (1), сигналов, отвечающих модам колебаний LY, LZ и ТХ. Важным обстоятельством является то, что если сигналы на выходах сумматоров 26 и 27 содержат паразитные сигналы наклона ΔUϕ, то на выходе сумматора 28 сигнал наклона отсутствует, причем при любых значениях угла ϕ. Это связано с тем, что сигналы наклона акселерометров 2 и 8 равны и синфазны, так что на сумматоре 28 они взаимоуничтожаются. Очевидно, что «чистый» сигнал U(TX) может быть использован для вычисления Δϕ(t) (путем двойного интегрирования), однако для компенсации сигнала наклона поступательных мод LY и LZ согласно (7) и (8), этот сигнал должен быть умножен на корректирующий сомножитель cosϕ(t) или sinϕ(t), соответственно. На схеме показан двойной интегратор 29, вычислители синуса и косинуса угла наклона конструкции, 30 и 31, соответственно, а также перемножители 32 и 33, подающие скорректированные сигналы компенсации cosϕ(t)·Δϕ(t) и sinϕ(t)·Δϕ(t) на сумматоры 26 и 27.
Поскольку схема на Фиг.6 представляет лишь часть всей конструкции, для простоты опускалось то, что наклономерами измеряются два угла наклона вокруг двух координатных осей, ϕ0x и ϕ0y, которые используются для коррекции в цепях компенсации «паразитных» сигналов акселерометров, связанных с модами ТХ и TY, то есть с угловыми колебаниями (вибрациями) Δϕ0x(t) и Δϕ0y(t).
Следует отметить, что существуют ограничения на скорость изменения угла наклона ϕ, которые ясны из логики построения схемы компенсации. Если сигнал Δϕ(t) может занимать весь диапазон частот системы авторегулирования, например, от 0.2 Гц до 300 Гц, то корректирующий сигнал sinϕ(t) или cosϕ(t) должен изменяться с частотой не выше 0.2 Гц. Это условие должно выполняться, чтобы сигнал коррекции не проникал в цепи авторегулирования. Иными словами, для цепей авторегулирования и компенсации сигнала наклона, корректирующий сомножитель должен быть квазистационарной величиной. Очевидно, что для крупных судов, самолетов и вертолетов это условие может быть выполнено.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНЫЙ ИЗОЛЯТОР ИСТОЧНИКОВ ВИБРАЦИЙ | 2008 |
|
RU2395736C1 |
| СИСТЕМА АКТИВНОЙ ЗАЩИТЫ ОТ МИКРОУСКОРЕНИЙ /ВИБРАЦИЙ С РАЗДЕЛЕНИЕМ МОД КОЛЕБАНИЙ | 2004 |
|
RU2275672C2 |
| ДИСКРЕТНЫЙ ФАЗОВЫЙ МОДУЛЯТОР | 1997 |
|
RU2119239C1 |
| Подвижная система магнитоэлектрического осциллографического гальванометра | 1973 |
|
SU469927A1 |
| Устройство для контроля частоты вращения вала турбобура | 1976 |
|
SU652318A1 |
| ПРИЕМНИК СИГНАЛОВ С АБСОЛЮТНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ НА УГОЛ 140°≤2ϕ≤160° | 2004 |
|
RU2269207C9 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2008747C1 |
| Устройство для контроля параметров процесса бурения | 1986 |
|
SU1461882A1 |

Изобретение относится к приборостроению и может быть использовано для защиты измерительной и технологической аппаратуры от вибраций. Способ заключается в преобразовании сигналов шести (или более) симметрично расположенных ортогонально ориентированных акселерометров в шесть раздельных сигналов для шести авторегуляторов, управляющих шестью модами колебаний (тремя поступательными и тремя торсионными). Это позволяет определять угловые колебания панели и компенсировать паразитные сигналы наклона акселерометров, совершающих угловые колебания (вибрации) в поле притяжения Земли. Технический результат заключается в повышении коэффициента подавления колебаний, а также работоспособности при больших наклонах корпуса приборов. 1 з.п. ф-лы, 6 ил.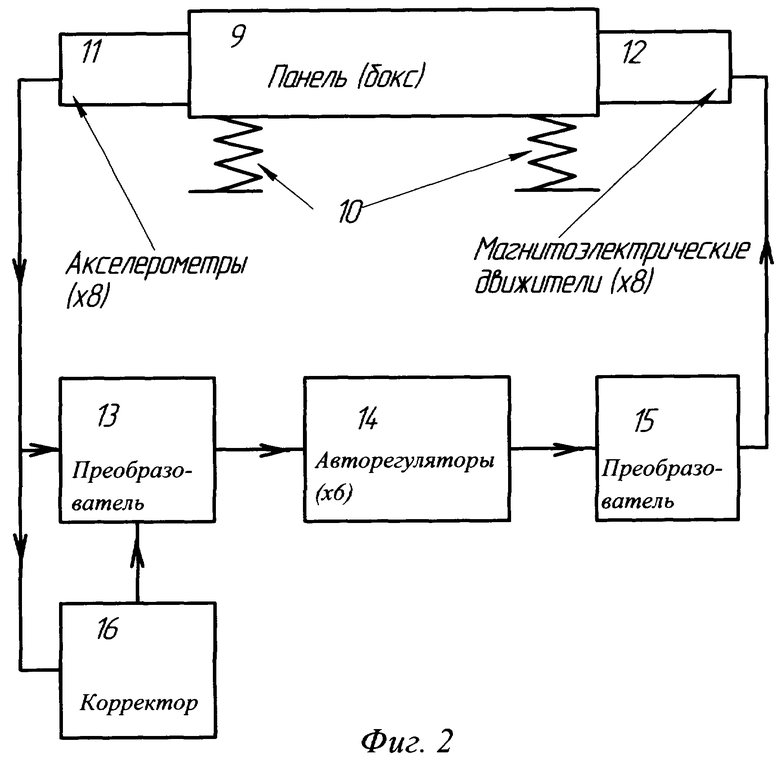
U7-U3=U(LX);
U5-U1=U(LY);
(U8+U6)+(U4+U2)=U(LZ);
(U8+U6)-(U4+U2)=U(TX);
(U6+U4)-(U8+U2)=U(TY);
U5+Ul=U(TZ),
а также электрические цепи, содержащие двойные интеграторы, наклономеры, вычислители синуса и косинуса углов наклона панели (бокса) и компенсирующие паразитные сигналы наклона акселерометров, совершающих угловые колебания панели в поле притяжения Земли при больших (более 20°) углах наклона панели (бокса).
| СИСТЕМА АКТИВНОЙ ЗАЩИТЫ ОТ МИКРОУСКОРЕНИЙ /ВИБРАЦИЙ С РАЗДЕЛЕНИЕМ МОД КОЛЕБАНИЙ | 2004 |
|
RU2275672C2 |
| Металлический водоудерживающий щит висячей системы | 1922 |
|
SU1999A1 |
| Marshall Space Flight Center | |||
| JP 4262145 A, 17.09.1992 | |||
| Бутиков Е.И | |||
| и др | |||
| Автоматизированный практикум по физике для студентов второго курса | |||
| Механика | |||
| Учебно-методическое | |||

