Изобретение относится к области приборостроения или механике систем с авторегулированием.
Нередко силовые машины создают неприемлемо высокий уровень вибраций перекрытий зданий. Это, в свою очередь, приводит к акустическим шумам, превышающим допустимый уровень, а также нарушает работу измерительных приборов на больших расстояниях от источников вибраций. На обитаемых космических аппаратах эта проблема стоит очень остро, поскольку вибрации двигателей, компрессоров, насосов, устанавливаемых на легких опорах, передаются элементам конструкции космического аппарата, что приводит к недопустимо высокому уровню акустических шумов внутри его отсеков.
Пассивные конструкции, используемые для целей изоляции источников вибрации, недостаточно эффективны, особенно в области низких частот. В то же время, используя активный способ, можно весьма эффективно изолировать или локализовать источник вибрации в заданном диапазоне частот.
Известны активные виброзащитные панели, использующиеся для защиты прецизионного оборудования от вибраций внешней среды. [Коммерческие изделия фирм HERZAN (США) [www.herzan.com] и HALZYONICS (Германия, США) [www.halcyonics.de, www.halcyonics.com], а также новая конструкция, описанная в Патенте РФ №2275672 от 19 апреля 2004 г.]. Покажем, что обратная задача, то есть изоляция источников вибрации от внешней среды, не решается простой трансформацией виброзащитного устройства, а требует новых технических решений.
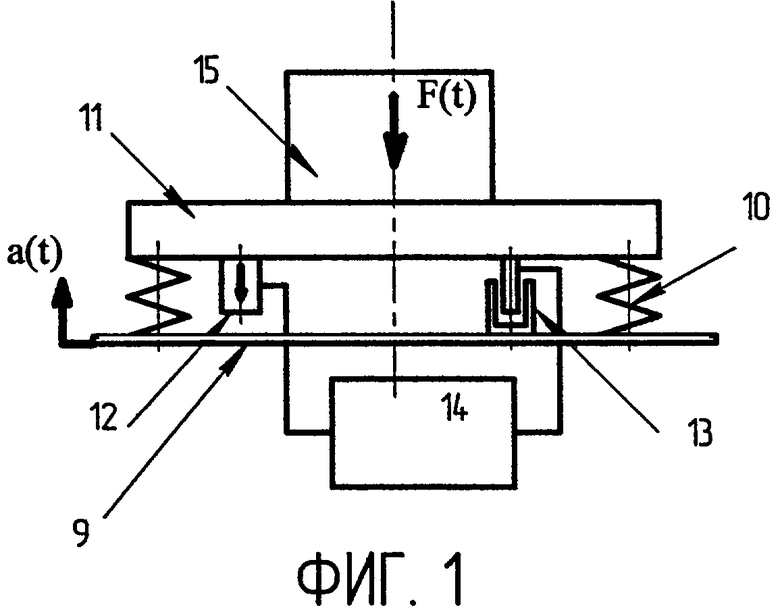
На Фиг.1 схематически показана виброзащитная панель, защищающая от одной поступательной моды колебаний, LZ. На схеме показаны основание 9 и панель 11, установленная на четырех пружинах 10. На панели 11 установлены акселерометр 12 и бесконтактный линейный магнитоэлектрический движитель 13. Блок электронной аппаратуры 14 замыкает цепь авторегулирования или отрицательной обратной связи. Защищаемый объект 15 установлен на панели 11. Важным обстоятельством является то, что, если объект 15 не является источником вибрации, устройство в первом приближении не взаимодействует с основанием 9. Действительно, если основание совершает колебания a(t), то магнитоэлектрический движитель, управляемый цепями отрицательной обратной связи 14, сжимает или растягивает пружины 10 так, что панель 11 остается неподвижной или изолированной от вибраций основания 9 (в меру точности регулирования). Совершенно иная ситуация наблюдается, если объект 15 является источником вибрации, то есть действует на панель 11 силой F(t). Теперь для того, чтобы погасить вибрации объекта 15, магнитоэлектрические движители прикладывают усилия к основанию 9. Если основание 9 недостаточно жесткое, оно будет вибрировать, то есть конструкция, показанная на Фиг.1, просто переносит энергию вибраций. Очевидно, что для заявленной цели это неприемлемо.
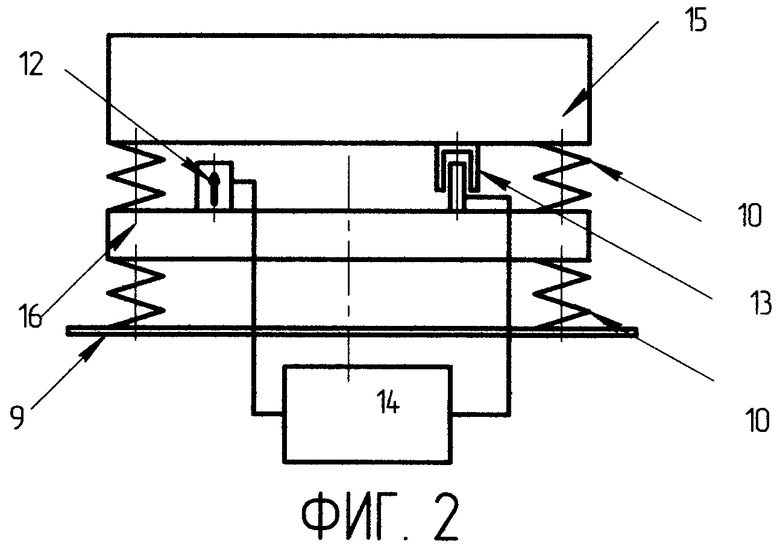
Для достижения заявленного технического результата, то есть активной изоляции или локализации источника вибраций, предлагается схема, представленная на Фиг.2. Как видно, на основании 9 на четырех пружинах 10 установлена панель 16, на которой, в свою очередь, на четырех пружинах 10 установлен изолируемый объект 15, представляющий собой источник вибраций. Акселерометр 12 и магнитоэлектрический движитель 13 вместе с электрическими цепями 14 замыкают контур отрицательной обратной связи, что приводит при неизменной вибрации объекта 15 к подавлению вибраций панели 16, а значит, и локализации источника вибрации, так как к основанию 9 вибрации не передаются.
Функция передачи цепи авторегулирования 14 выбирается так, чтобы активный диапазон частот соответствовал спектру шумов изолируемого объекта 15. Видно, что панель 16 на Фиг.2 в сущности представляет собой активную акустическую выгородку. С другой стороны, предложенная схема активного изолятора источников вибрации представляет собой механический (или электромеханический) аналог активного фильтра низких частот, хорошо известного в электронике.
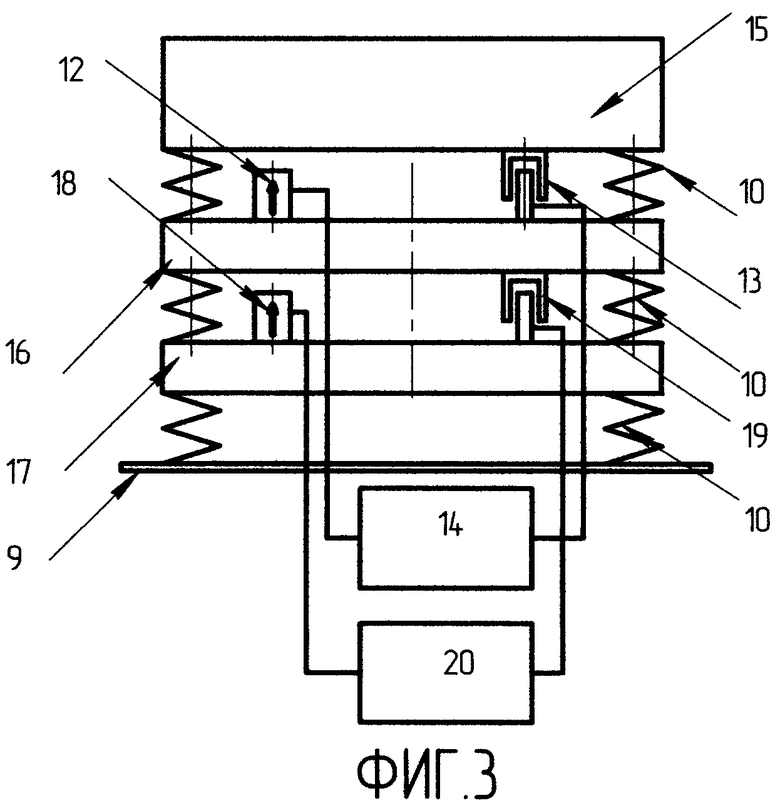
Подобно тому как в электронике часто используется каскадное включение активных фильтров, активный изолятор источников вибрации так же может состоять из двух- или более каскадов. На Фиг.3 показана схема активного двухкаскадного изолятора источников вибраций. Видно, что здесь между основанием 9 и объектом 15 располагаются две панели 16 и 17, разделенные пружинами 10. Подавление вибрации панелей осуществляется двумя контурами авторегулирования, состоящими из акселерометров 12 и 18, магнитоэлектрических движителей 13 и 19 и электрических цепей 14 и 20. Хотя механическая конструкция двух (или более) каскадной схемы активного изолятора источника вибраций сложнее однокаскадной, она может быть значительно эффективней.
Выше для простоты рассматривались схематические одномодовые конструкции активных изоляторов источников вибраций. Реально необходимо подавлять все шесть мод колебаний виброизолирующей панели, три поступательные LX, LY, LZ и три торсионные TX, TY, TZ. Для этой цели на панели 16 (а также на панели 17 для двухкаскадной конструкции) необходимо разместить группу, состоящую из восьми акселерометров и восьми магнитоэлектрических движителей.
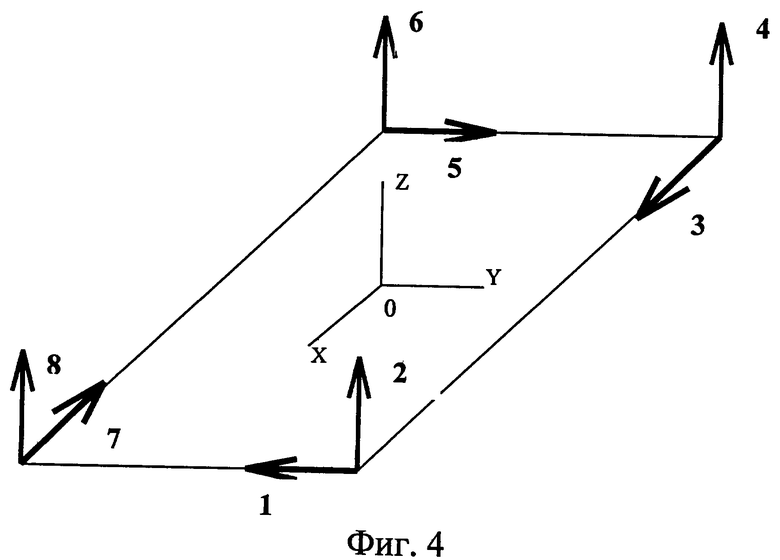
На Фиг.4 показано возможное (один из вариантов) расположение на панели восьми акселерометров и восьми магнитоэлектрических движителей 1-8 (каждая стрелка обозначает коаксиальную пару акселерометр - магнитоэлектрический движитель). Для того чтобы от восьмиканальной схемы управления по координатам (или ускорениям) отдельных акселерометров перейти к управлению шести отдельных мод колебаний панели 16, необходимо преобразовать сигналы акселерометров U1…U8 в сигналы продольных U(LX), U(LY), U(LZ) и торсионных U(TX), U(TY), U(TZ) мод колебаний следующим образом:
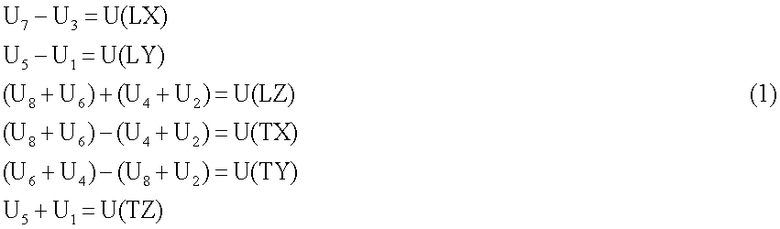
Очевидно, что такое преобразование может быть достаточно точно осуществлено с помощью сумматоров. Для того чтобы выходные сигналы шести авторегуляторов преобразовать в восемь сигналов, поступающих на магнитоэлектрические движители, необходимо произвести обратное преобразование, симметричное преобразованию, описываемому формулами (1).
Блок-схема активного изолятора источников вибрации, функционирующего описанным выше образом, представлена на Фиг.5. Схематически обозначена панель 11, установленная на пружинах 10. Группа из восьми акселерометров 12 и восьми магнитоэлектрических движителей 13 также показана условно, реально она может иметь вид, например, как показано на Фиг.4. На схеме видно, что стандартная замкнутая цепь авторегулирования состоит из изолирующей панели 11, установленной на пружинах 10, акселерометров 12, электронного блока авторегулирования 22 и магнитоэлектрических движителей 13 (см., например, [Трофимов А.И., Егупов Н.Д., Дмитриев А.Н. "Методы теории автоматического управления, ориентированные на применение ЭВМ", М.: Энергоатомиздат, 1997. 656 с.] с обширным списком литературы). Дополнительными, новыми узлами в этой цепи являются преобразователи 21 и 23. Преобразователь 21 в соответствии с соотношениями (1) преобразует восемь сигналов акселерометров в сигналы шести мод колебаний, которые и поступают на шесть авторегуляторов 22. Выходы авторегуляторов поступают на преобразователь 23, который создает сигналы для восьми магнитоэлектрических движителей, то есть совершает преобразование, обратное по отношению к первому преобразователю 21. Функционирование блока 24, предназначенного для коррекции или компенсации «паразитного» сигнала наклона акселерометров, совершающих угловые колебания (вибрации) в поле притяжения Земли, будет рассмотрено ниже.
Раздельное регулирование отдельных мод колебаний увеличивает устойчивость системы авторегулирования при высоких коэффициентах подавления колебаний; наибольший эффект будет наблюдаться для систем защиты, работающих в невесомости [Патент РФ №2275672 от 19 апреля 2004 г. "Система активной защиты от микроускорений/вибраций с разделением мод колебаний"].
Покажем, что описанные выше новые элементы многоканального регулирования: а) симметричная группа ортогонально ориентированных акселерометров (и соосных с ними магнитоэлектрических движителей) и б) разделение восьми каналов управления на шесть независимых цепей, позволяют существенно расширить его возможности за счет подавления «паразитного» сигнала наклона акселерометров, совершающих угловые колебания (вибрации) в поле притяжения Земли.
Как видно из Фиг.4, часть акселерометров, установленных на панели, ориентированы вертикально, а другая часть - горизонтально. Рассмотрим «полезные» сигналы ускорения Ua и «паразитные» сигналы наклонов Uφ, которые дают эти акселерометры при малых качаниях панели вокруг осей Ох и Оу. Если Fa(t)=ma(t) сила, действующая на пьезоэлемент (или другое измерительное устройство) акселерометра с массой m при ускорении a(t), то сигнал акселерометра Ua(t)=Ka(t) (здесь К - коэффициент передачи акселерометра по напряжению).
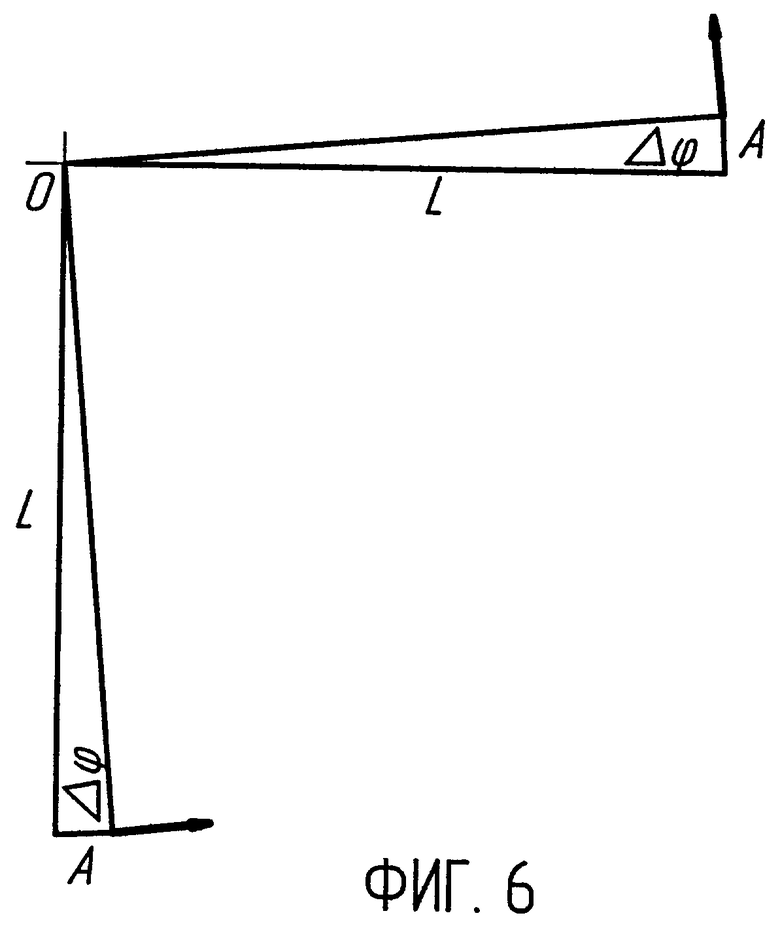
Рассмотрим схематически показанные на Фиг.6 угловые колебания панели (бокса) Δφ(t) с установленными на ней горизонтально и вертикально ориентированными акселерометрами, обозначенными стрелками. При колебаниях с частотой ω и малой амплитудой Δφ амплитуда ускорения am=Aω2, где A=L·Δφ линейная амплитуда колебаний акселерометра, a L - расстояние от акселерометра до оси качания или характерный размер прибора. Амплитуда сигнала акселерометра, таким образом, равна:

Очевидно, что сигналы ускорения (2) не зависят от ориентации акселерометров. Иная ситуация наблюдается для «паразитных» сигналов наклона акселерометров в поле тяготения Земли. Очевидно, что для вертикально ориентированного акселерометра составляющая силы тяжести, направленная вдоль его оси чувствительности

где g - величина ускорения свободного падения, а φ - угол наклона относительно исходной вертикальной ориентации. Для акселерометра, ориентированного горизонтально, аналогичная сила описывается выражением

При угловых периодических колебаниях панели (бокса) с малыми амплитудами Δφ силы  и
и  также изменяются периодически с амплитудами, которые можно получить, дифференцируя (3) и (4):
также изменяются периодически с амплитудами, которые можно получить, дифференцируя (3) и (4):


Для амплитуд сигнала вертикально и горизонтально ориентированных акселерометров соответственно получаем:


Рассмотрим вначале виброизолирующую панель, установленную неподвижно на горизонтальной поверхности. В этом случае углы наклона φ вертикально и горизонтально ориентированных акселерометров равны нулю, поэтому sin φ≈Δφ, cos φ≈1, так что


Отношения «паразитного» сигнала наклона акселерометров к «полезному» сигналу ускорения можно получить из соотношений (2), (9) и (10),


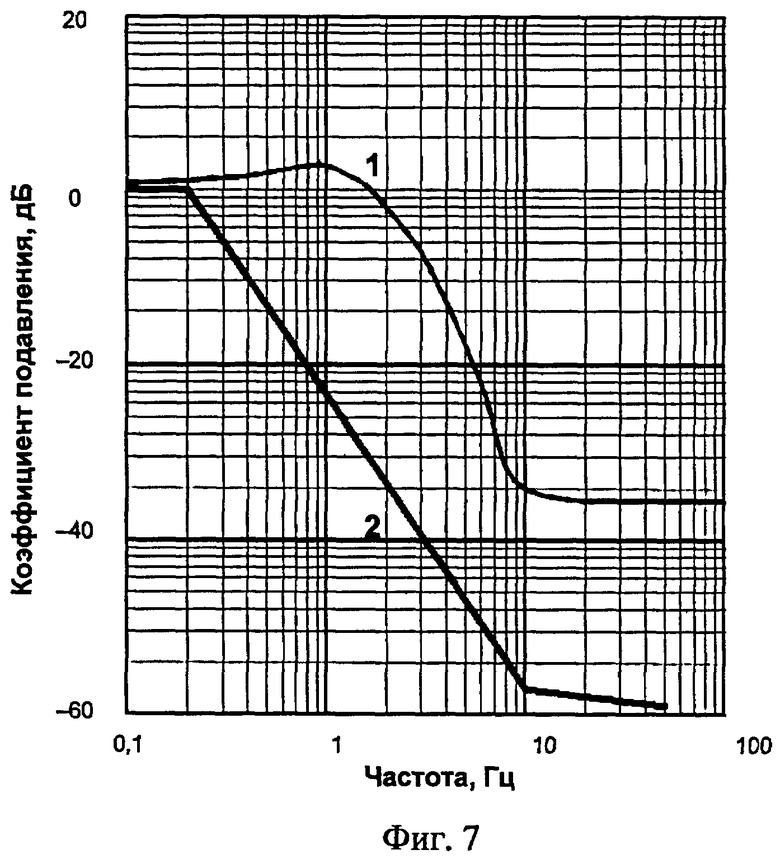
Из соотношений (11) и (12) видно, что помеха от сигнала наклона акселерометров в обоих случаях быстро (квадратично) увеличивается с понижением частоты. Так, для конструкции с L=20 см отношение  при ν=2.7 Гц и достигает значения 3 при ν=0.5 Гц. Видно, что частота около 2 Гц является предельной, ниже которой сигнал наклона акселерометров подавляет сигнал ускорения. Заметим, что для всех производящихся виброзащитных столов частота ≈2 Гц является граничной; в качестве примера на Фиг.7 (кривая 1) показана типичная частотная зависимость коэффициента подавления колебаний виброзащитного стола АVI-150 фирмы HALCYONICS. Видно, что ниже 2 Гц система неэффективна, а максимальный коэффициент подавления достигается при частоте 10 Гц.
при ν=2.7 Гц и достигает значения 3 при ν=0.5 Гц. Видно, что частота около 2 Гц является предельной, ниже которой сигнал наклона акселерометров подавляет сигнал ускорения. Заметим, что для всех производящихся виброзащитных столов частота ≈2 Гц является граничной; в качестве примера на Фиг.7 (кривая 1) показана типичная частотная зависимость коэффициента подавления колебаний виброзащитного стола АVI-150 фирмы HALCYONICS. Видно, что ниже 2 Гц система неэффективна, а максимальный коэффициент подавления достигается при частоте 10 Гц.
Если спектр шумов изолируемого объекта не содержит низкочастотных (ниже ~8 Гц) колебаний, то в схеме на Фиг.5 может быть исключен корректор 24, при этом подавление колебаний виброизолирующей панели будет соответствовать кривой 1 на Фиг.7. Если необходимо изолировать вибрации с более низкими частотами, следует использовать коррекцию сигнала наклона акселерометров, которая осуществляется описанным ниже способом.
Сравнение (11) и (12) показывает, что  отличается от
отличается от  малым сомножителем Δφ. Поскольку по оценке величина Δφ≤10-3, очевидно, что влияние сигнала наклона для акселерометров, ориентированных вертикально, будет проявляться при значительно более низких частотах (ниже 0.1 Гц), чем для ориентированных горизонтально. Это очень важное обстоятельство, так как неискаженные сигналы вертикально ориентированных акселерометров могут быть использованы для создания цепей компенсации (подавления) сигналов наклона горизонтально ориентированных акселерометров.
малым сомножителем Δφ. Поскольку по оценке величина Δφ≤10-3, очевидно, что влияние сигнала наклона для акселерометров, ориентированных вертикально, будет проявляться при значительно более низких частотах (ниже 0.1 Гц), чем для ориентированных горизонтально. Это очень важное обстоятельство, так как неискаженные сигналы вертикально ориентированных акселерометров могут быть использованы для создания цепей компенсации (подавления) сигналов наклона горизонтально ориентированных акселерометров.
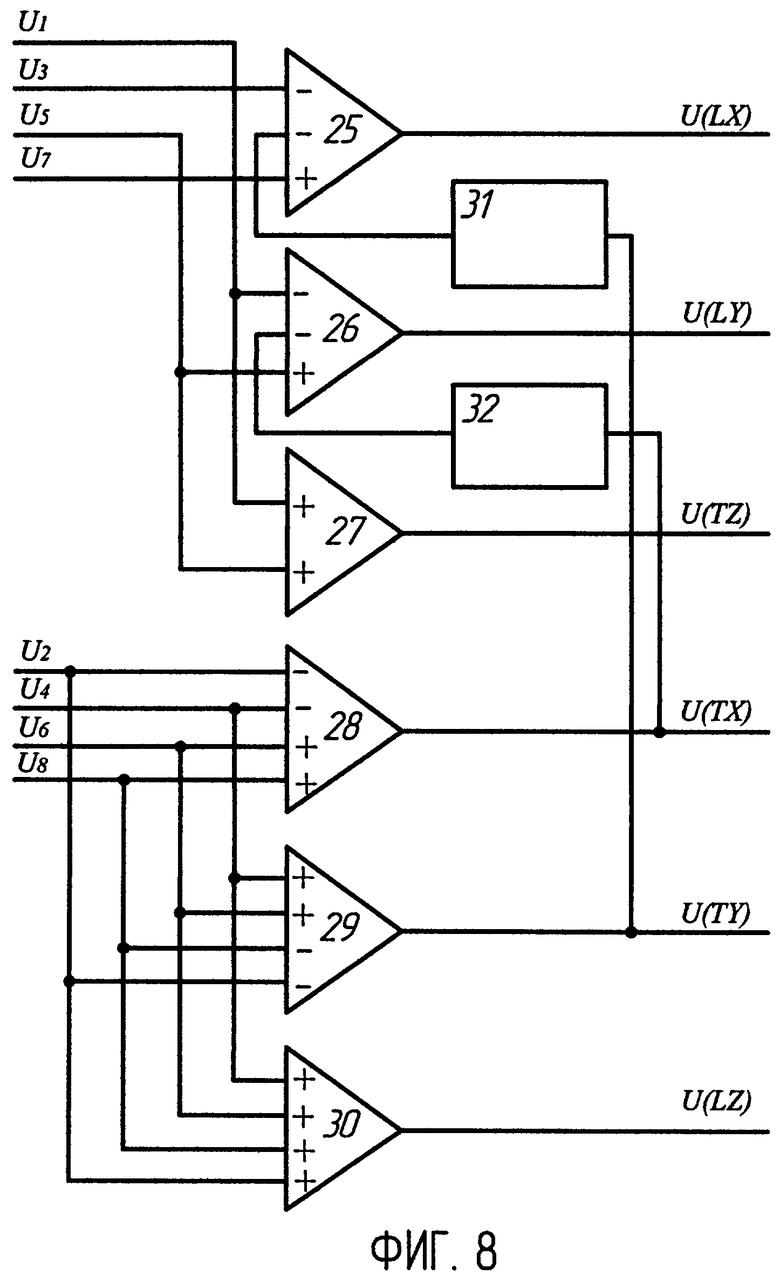
Обратимся вновь к Фиг.4, на которой показано расположение восьми акселерометров (и восьми соосных с ними магнитоэлектрических движителей) на панели виброзащитного стола. Видно, что акселерометры 2, 4, 6, 8 ориентированы вертикально, а 1, 3, 5, 7 - горизонтально. Рассмотрим качания панели вокруг оси Ox (или другой параллельной ей оси), то есть торсионную моду колебаний TX. Очевидно, что эта мода сопровождается наклонами акселерометров 1 и 5. Возникающий при этом "паразитный" сигнал согласно (10) пропорционален величине Δφ(t), очевидно, что подавить (компенсировать) его можно сигналом, пропорциональным этому углу. Для выделения такого сигнала нужно дважды проинтегрировать сигнал ускорения U(TX) торсионной моды колебаний, что дает угол наклона. Сложив его (с нужным знаком и коэффициентом) с сигналом ускорения трансляционной моды U(LY), получим сигнал U0(LY), очищенный от паразитного сигнала наклона:

Аналогичным образом, дважды интегрируя сигнал ускорения U(TY), получаем сигнал, компенсирующий сигналы наклона акселерометров 3 и 7:

В формулах преобразования (1) сигналы горизонтально ориентированных акселерометров 1 и 5 присутствуют также в сигнале торсионной моды U(TZ). Однако из Фиг.4 видно, что в сумме U5+U1 сигналы ускорения синфазны, а сигналы наклона противофазны, так что при достаточной идентичности измерительных цепей они взаимно уничтожаются. Поэтому для рассматриваемой конструкции достаточно двух компенсирующих цепей, функционирующих в соответствии с (13) и (14).
Схема на Фиг.8 показывает, как с помощью шести сумматоров 25-30 и двух двойных интеграторов 31, 32 осуществляется разделение сигналов управления, а также компенсация «паразитного» сигнала наклона акселерометров в поле притяжения Земли.
Итак, такие элементы конструкции активных изоляторов источников вибрации, как:
а) панель с симметричной группой ортогонально ориентированных акселерометров;
б) сумматоры, включенные по схеме, соответствующей соотношениям (1), осуществляющие разделение сигналов управления;
в) цепи (двойные интеграторы), измеряющие амплитуды угловых колебаний (вибраций) панели и компенсирующие сигналы наклона акселерометров по схеме, соответствующей уравнениям (13) и (14),
увеличивают устойчивость регулирования и расширяют активный диапазон в область низких частот. Максимальный сдвиг граничной частоты в сторону низких частот (в 30 и более раз) определяется точностью цепей интегрирования и компенсации.
Кривая 2 на Фиг.7 показывает, что новая схема регулирования даже в самом простом исполнении (точность порядка 1%) обеспечивает десятикратное понижение граничной частоты активного диапазона (от 2 Гц до 0.2 Гц) и десятикратное увеличение коэффициента подавления колебаний виброизолирующей панели (от -40 дБ до -60 дБ) в сравнении с коммерческими приборами (кривая 1).
Очевидно, что на космических аппаратах сигнал наклона акселерометров отсутствует, что позволяет исключить цепи компенсации (узлы 31 и 32 На Фиг.8).
В зависимости от конкретных задач могут создаваться комбинированные конструкции с одной или двумя активными виброизолирующими панелями, управляемыми электронной аппаратурой подходящего типа, а также совместно с пассивными демпфирующими устройствами.
Важно, что мощные двигатели, компрессоры, насосы, снабженные активными изоляторами источников вибрации, могут устанавливаться даже на верхних этажах зданий.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНАЯ ВИБРОЗАЩИТНАЯ ПАНЕЛЬ (БОКС ) С КОМПЕНСАЦИЕЙ СИГНАЛА НАКЛОНА АКСЕЛЕРОМЕТРОВ ДЛЯ СТАЦИОНАРНЫХ УСЛОВИЙ И ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2337390C2 |
| СИСТЕМА АКТИВНОЙ ЗАЩИТЫ ОТ МИКРОУСКОРЕНИЙ /ВИБРАЦИЙ С РАЗДЕЛЕНИЕМ МОД КОЛЕБАНИЙ | 2004 |
|
RU2275672C2 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| СПОСОБ ОПТИМИЗАЦИИ ДИНАМИЧЕСКИХ УСЛОВИЙ ФУНКЦИОНИРОВАНИЯ ГРАВИТАЦИОННО-ЧУВСТВИТЕЛЬНЫХ УСТАНОВОК В УСЛОВИЯХ ОСТАТОЧНЫХ МИКРОУСКОРЕНИЙ НА БОРТУ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2369535C1 |
| ИНТЕРФЕРОМЕТР ПОВЫШЕННОЙ ТОЧНОСТИ С АКТИВНЫМ ПОДАВЛЕНИЕМ ПАРАЗИТНЫХ ВИБРАЦИЙ | 2014 |
|
RU2572412C1 |
| ВИБРОИЗОЛЯЦИОННАЯ ПЛАТФОРМА ДЛЯ ВЫСОКОЧУВСТВИТЕЛЬНОГО ОБОРУДОВАНИЯ И ИСТОЧНИКОВ ВИБРАЦИЙ | 2017 |
|
RU2657154C1 |
| СЕЙСМИЧЕСКИЙ ВИБРАТОР, УПРАВЛЯЕМЫЙ С ПРЯМЫМ ОБНАРУЖЕНИЕМ ПЕРЕМЕЩЕНИЯ ПЛИТЫ ОСНОВАНИЯ | 2010 |
|
RU2503976C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И КОМПАКТНАЯ ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2438888C1 |
| УСТРОЙСТВО ИНФОРМИРОВАНИЯ МЕХАНИКА-ВОДИТЕЛЯ О РАБОТОСПОСОБНОСТИ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ В УСЛОВИЯХ МЕХАНИЧЕСКИХ ВОЗДЕЙСТВИЙ ПРИ ЕЕ ЭКСПЛУАТАЦИИ | 2018 |
|
RU2711043C2 |
| КОМБИНИРОВАННЫЙ ГИДРОАКУСТИЧЕСКИЙ ПРИЕМНИК ДЛЯ ГИБКОЙ ПРОТЯЖЕННОЙ БУКСИРУЕМОЙ АНТЕННЫ | 2012 |
|
RU2501043C1 |
Изобретение относится к устройству активного изолирования источников вибрации. Устройство содержит виброизолирующую панель, установленную на пружинах и несущую симметрично расположенную группу из восьми акселерометров и восьми магнитоэлектрических движителей. Устройство содержит электронные цепи управления, содержащие сумматоры, преобразующие сигналы акселерометров U1…U2 в сигналы трех продольных U(LX), U(LY), U(LZ) и трех торсионных U(TX), U(TY), U(TZ) мод колебаний для шести авторегуляторов. Электрические цепи содержат двойные интеграторы, компенсирующие паразитные сигналы наклона акселерометров, совершающих угловые колебания в поле притяжения Земли. Колебания источника вибраций, установленного на виброизолирующей панели на пружинах, локализуются в результате активного подавления колебаний виброизолирующей панели, выполняющей функции активной акустической выгородки, в диапазоне частот от 0,2 - 500 Гц. Достигается улучшение активной изоляции и локализации источников вибраций. 8 ил.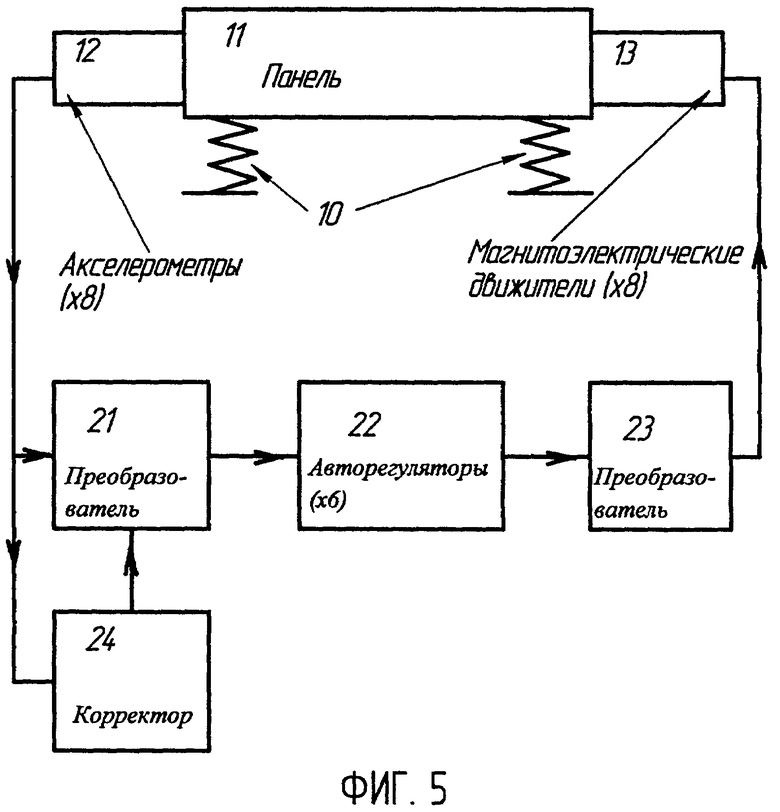
Активный изолятор источников вибраций, содержащий виброизолирующую панель, установленную на пружинах, несущую симметрично расположенную группу из восьми акселерометров и восьми магнитоэлектрических движителей, электронные цепи управления, содержащие сумматоры, преобразующие сигналы акселерометров U1…U8 в сигналы трех продольных U(LX), U(LY), U(LZ) и трех торсионных U(TX), U(TY), (TZ) мод колебаний для шести авторегуляторов, электрические цепи, содержащие двойные интеграторы, компенсирующие паразитные сигналы наклона акселерометров, совершающих угловые колебания в поле притяжения Земли, отличающийся тем, что колебания источника вибраций, установленного на виброизолирующей панели на пружинах, локализуются в результате активного подавления колебаний виброизолирующей панели, выполняющей функции активной акустической выгородки, в диапазоне частот 0,2-500 Гц.
| СИСТЕМА АКТИВНОЙ ЗАЩИТЫ ОТ МИКРОУСКОРЕНИЙ /ВИБРАЦИЙ С РАЗДЕЛЕНИЕМ МОД КОЛЕБАНИЙ | 2004 |
|
RU2275672C2 |
| Виброгаситель | 1984 |
|
SU1275169A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПАРАЗИТНЫХ КОЛЕБАНИЙ КОНСТРУКЦИИ | 1991 |
|
RU2044170C1 |
| Устройство для гашения колебаний | 1990 |
|
SU1778387A1 |
| DE 102006046593 A1, 03.04.2008. | |||

